USV復雜水域環境綜合感知技術
2021-10-28 06:37:58馬賽男邵漢東何旭東
造船技術 2021年5期
關鍵詞:檢測
馬賽男, 邵漢東, 王 晨, 何旭東
(浙江嘉藍海洋電子有限公司,浙江 舟山 316021)
0 引 言
無人水面艇(Unmanned Surface Vessel, USV)在水質監測、水文信息監控采集、信號中繼、海底掃測及電纜管道繪制、海上救援等方面發揮著重要作用。由于USV模式多樣化、作戰行動靈活化、艇體結構隱蔽化、作戰人員零傷亡、網絡作戰中心化等優勢,使其越來越受到世界發達國家海軍的關注。
USV將自身所處的工作環境和狀態實時傳遞至岸基和工控機的過程就是環境感知。其是USV自主航行和避障決策任務的技術基礎,是USV主要關鍵技術之一。國內學者已對提高USV的環境感知作了很多研究。李小毛等[1]提出一種基于3D激光雷達的障礙檢測算法,即將一個周期內的3D激光點云投影至2.5D柵格地圖中,對障礙物進行聚類分割;對柵格中的原始點云數據進行特征提取, 并用卡爾曼濾波實時跟蹤。王博[2]從光視覺角度展開研究:一是基于USV的水面圖像預處理,主要包括水面圖像穩像研究及去霧增強研究;二是對水界線進行檢測;三是利用光視覺目標檢測;四是提出水面目標跟蹤方法。姚旭洋[3]對雙目立位視覺的立體匹配環節進行改進優化,可更加快速準確地獲取目標深度,并對水上目標的識別算法展開研究。因此,環境感知是USV自主航行和避障決策、任務的技術基礎,為USV的安全航行提供保障,文中將重點介紹USV的環境感知技術。
1 多傳感器數據融合技術綜述
USV所處海洋環境復雜,海面目標檢測需要考慮氣象、地理、海面非線性隨機變化等諸多環境因素,為確保USV能夠高效地完成救援任務,需對視覺圖像信息、海事雷達圖像、激光雷達圖像等所包含的距離數據進行多傳感器融合。多傳感器融合技術通過對多類同構或異構傳感器數據進行綜合(集成或融合)獲得比單一傳感器更多的信息,形成比單一信源更可靠、更完全的融合數據,使用多傳感器數據融合擴展空間觀測范圍。
根據各傳感器探測障礙物能力實行不同數據處理方法,不同傳感器的優缺點如表1所示。圖1為環境傳感器海面檢測范圍。
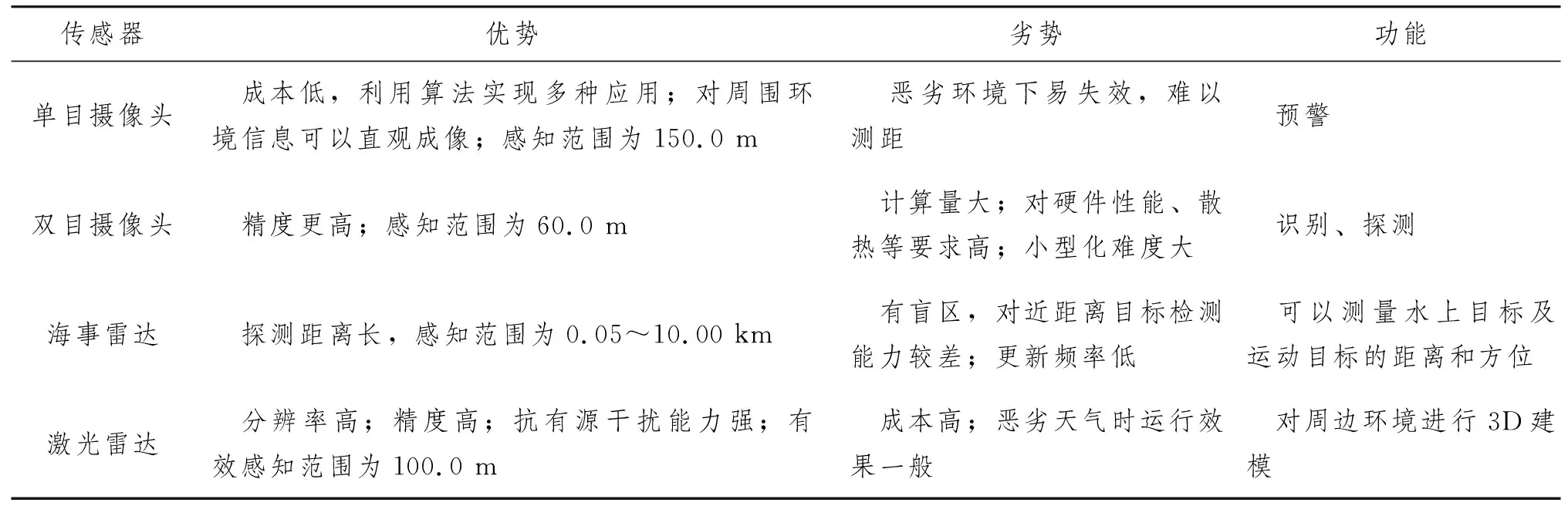
表1 不同傳感器的優缺點

圖1 環境傳感器海面檢測范圍示例
1.1 海事雷達障礙物識別技術
海事雷達是船舶安全航行非常重要的設備,主要有厘米波雷達和毫米波雷達,工作頻率主要在X、S、C、Ka頻段。船舶可安裝雙頻段雷達,比如X和S頻段可以配合使用。
(1)雷達距離探測原理
散射體受到雷達電磁波照射后,因其散射性會產生回波。散射功率的大小與雷達發射功率、距離及散射體散射特性有關。雷達距離方程的2種基本形式如下:
(1)
(2)
式(1)~式(2)中:Rmax,1和Rmax,2分別為2種方程形式下散射體至雷達的距離;P1為雷達發射功率;σ為散射體有效反射面積;Aγ為雷達接收天線的有效面積;λ為波長;Si,min為最小可檢測信號功率;G為雷達天線增益。

(2)小目標雷達散射截面積精確測量
為了驗證海事雷達的障礙物識別技術,選擇0.63 m×0.31 m(長×寬)、面積為0.195 3 m2的一塊鋼板作為驗證對象,進行小目標雷達散射截面積(Radar Cross Section, RCS)精確測量。
雷達至海面距離約1.5 m,鋼板垂直于雷達發射波,分別在不同的量程下進行論證,如圖2~圖4所示。
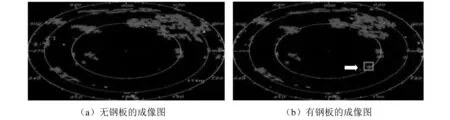
圖2 雷達在116 m量程下對鋼板的成像圖

圖3 雷達在232 m量程下對鋼板的成像圖

圖4 雷達在464 m量程下對鋼板的成像圖
通過雷達掃描圖對比可知:對面積小于0.2 m2的鋼板,雷達使用3個不同的量程進行測試,并均檢測出鋼板的具體方位。由此可知,基于成像抽取的小目標RCS精確測量技術實用且可靠。
1.2 激光雷達障礙物檢測技術
激光雷達具備360°掃描范圍,探測距離達百米級,通過采集和解析激光點云數據,能夠獲取USV近距離范圍內的運動或靜止目標,輔助USV完成避碰功能。激光雷達經過掃描得到點目標,如圖5所示。

圖5 激光雷達掃描示例
對于點目標,激光雷達探測能量包含從目標上被照亮光斑點反射的所有能量,在作用距離方程計算中,需要對目標上整個被照亮區域進行計算。
基于激光雷達的動態障礙物信息提取研究,包括:目標檢測、目標識別和動態目標跟蹤等3個模塊(見圖6)。目標檢測模塊對激光原始點云數據進行聚類和特征提取處理,得到目標的形狀、空間位置信息。目標識別模塊利用神經網絡算法對目標進行識別和分類,輸出點云簇的類別信息。USV自身位置和姿態信息通過動態目標跟蹤模塊融合目標位置信息,利用卡爾曼濾波算法計算USV優化的動態目標運動,并輸出其狀態信息。

圖6 目標檢測、目標識別和動態目標跟蹤流程
圖7為USV避讓障礙物場景下的激光雷達檢測效果示例。
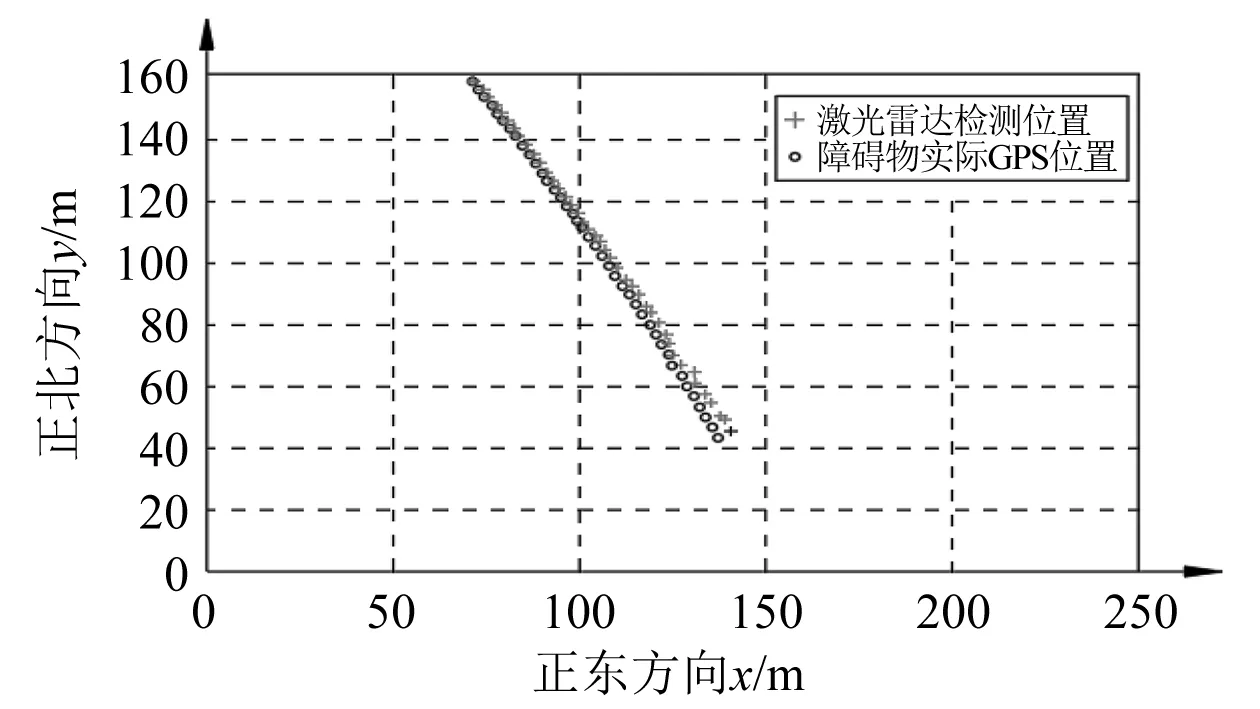
圖7 避障過程中的激光雷達檢測位置與障礙物實際GPS位置對比
通過一一對應各時刻激光雷達檢測位置(x1,y1)與障礙物GPS標記位置(x2,y2),得到兩者之間的距離差Δd。圖8為避障過程中的距離差隨時間變化曲線。

圖8 避障過程中的距離差隨時間變化曲線
上述所有時刻的距離差平均值計算結果為3.609 9 m。以激光雷達傳感器位置檢測誤差5.0 m為界限進行統計,滿足該條件的概率為82.50%。將激光雷達跟蹤障礙物得到的障礙物速度信息與障礙物的GPS反饋速度信息進行對比,得到關于速度大小和速度方向的精度統計,如圖9和圖10所示。

圖9 障礙物速度大小統計

圖10 障礙物速度方向統計
速度大小檢測的平均誤差為0.742 1 m/s,速度方向檢測的平均誤差為5.908 6°。通過對激光雷達數據的處理對比可知:基于激光雷達檢測的障礙物信息較為準確,基本滿足USV安全航行對環境信息精度的要求。
1.3 基于單目攝像頭的障礙物測距技術
單目測距系統簡單、運算量小,需要目標點之間有幾何約束關系,應用場景有限制,成本較低。基于單目攝像頭的測距方法算法簡單、計算量小,成本低廉且實時性佳,近年來國內外對單目測距方法取得了一定的成果,主要分為基于深度學習的測距方法和傳統數學模型測距方法。項目采用傳統數學模型的逆透視投影變換進行測距。基于逆透視投影變換的單目測距原理如圖11所示。

圖11 單目測距原理
1.4 基于雙目攝像頭的障礙物測距技術
雙目攝像頭無須識別目標的類別信息即可完成所有單目攝像頭的功能,且能夠獲得精度相對較高的深度信息。
基于雙目立體視覺的深度相機類似人類的雙眼,與基于飛行時間(Time of flight,TOF)技術、結構光原理的深度相機不同,其不對外主動投射光源,完全依靠拍攝的2張圖片(RGB色彩模式或灰度圖)計算深度,因此也被稱為被動雙目深度相機。
雙目定位流程(見圖12)如下:對左、右兩個攝像機進行相機標定,得到各自的標定參數;基于標定參數分別對左圖和右圖進行圖像校正,校正后的2張圖像位于同一平面且互相平行;對校正后的2張圖像進行分割、特征點匹配;基于雙目攝像頭得到圖像空間的深度圖[4]。

圖12 雙目定位流程
2 復雜環境下多傳感器感知數據融合流程
在實際場景中,海事雷達和激光雷達是全向目標探距,而單目和雙目測距是定向測距。USV主要關注以船首向為參考點-90°~+90°內的掃描區間,單目和雙目攝像頭以此范圍為掃描范圍。
在一定范圍內,海事雷達能夠較好地探測較遠距離內的目標方位,而激光雷達則對USV較近范圍內的目標靈敏,因此海事雷達和激光雷達能夠較好地互補。然而,受風浪、雨雪天氣的影響,激光雷達在實際應用中如何抑制雜波影響是個關鍵問題。在復雜環境感知中,通過單目和雙目攝像頭對激光雷達進行補償可以有效地抑制由風浪引起的雜波影響[5]。在實際應用中,海事雷達與激光雷達在距離上互補,單目與雙目攝像頭在功能上對激光雷達進行補償。在補償失敗中,通過航行信息對補償失敗的目標進行置信度測試。當置信度在一定周期內大于等于某值時,認為此目標真實存在;當低于某值時,認為此目標不存在[6],應當舍棄。在復雜環境下,多傳感器感知數據融合的實際操作流程如圖13所示。

圖13 多傳感器感知數據融合流程
3 復雜環境下多傳感器感知技術實船海上測試
以海上救助USV為載體,試驗海域內有海警船、漁船、貨船等,海況2級,風力1~3級。USV航速為5 kn,雷達掃描圖像生成周期為2.7 s,激光雷達點云數據處理周期為1.5 s,單目和雙目攝像頭測距周期為1.5 s。表2為測試結果。
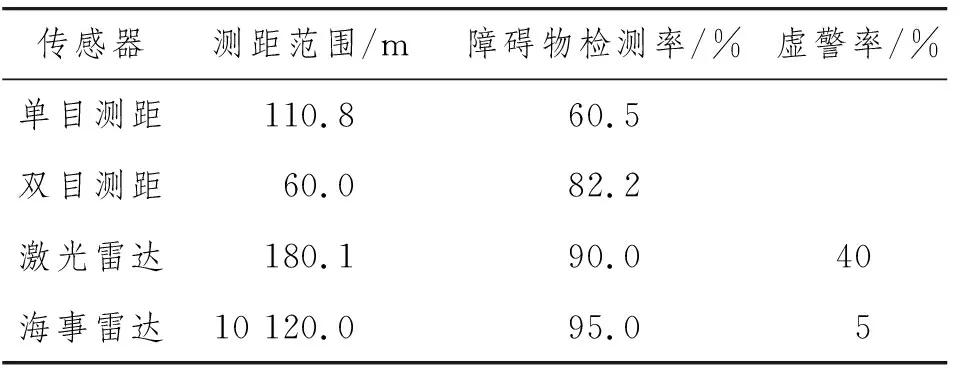
表2 不同傳感器性能測試
表3為不同置信度下的多傳感器數據融合結果。

表3 不同置信度下的多傳感器數據融合結果
根據表3信息可知:置信度越高時,激光雷達、單目攝像頭、雙目攝像頭及海事雷達經數據融合后得到的最優結果目標檢測率較好,虛警率會降低。通過對4種傳感器檢測出的障礙物數據進行融合,能夠有效地提高目標檢測率、降低目標虛警率。
4 結 語
通過對適用于USV感知傳感器采集的數據進行校正、分析和融合,可形成一種穩健的目標識別方法,為USV的自主航行提供穩定、可靠的水上障礙物方位信息。但是USV在海上航行時會受到風向風速、波高流向、淺灘暗礁、各類來往船只等眾多隨機的可移動和固定障礙物的影響,面對如此復雜、實時多變的環境,目前的海上綜合感知技術水平還遠遠不夠。提高識別能力、提高準確性仍然是環境感知技術的重要研究方向。基于某海上救助USV實船數據進行綜合感知技術的研究與探討,對提高USV的技術與安全航行具有一定的參考價值。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
