一種卷繞系統大行程精密自動測量計米方法?
2021-10-27 12:14:46金偉清李郁劉篤喜
傳感技術學報 2021年8期
關鍵詞:測量
金偉清李 郁劉篤喜
(1.西安明德理工學院智能制造與控制技術學院,陜西 西安710124;2.西北工業大學機電學院,陜西 西安710072)
卷繞系統的運動行程可達數米甚至數百米,在卷繞系統收放過程中,常常需要進行收放位移的自動測量計米。自動測量計米屬于典型的動態大行程位移測量,例如在線纜制造領域廣泛應用的測量設備——線纜計米器、鋼絲繩長度測量裝置等。卷繞過程中的運動位移測量是否準確,往往決定了卷繞運動的控制精度,對所服務的工業自動化生產過程質量有著極其重要的影響。
卷繞系統線纜測量計米方法有滾輪式和履帶式[1-3]。滾輪式計米機構是目前常用的一種卷繞式系統大行程檢測裝置,其明顯不足是,被測線纜夾持在計米輪和張力輪之間,線纜與滾輪之間呈點接觸,產生的摩擦力比較小,附著力不強,因而線纜與計米輪之間不是純滾動摩擦,還存在滑動摩擦,會產生打滑現象,導致測量計米誤差大。此外,滾輪式計米機構只能用于對線纜位移進行單方向檢測,難以辨別線纜移動方向,無法實現雙向可逆檢測。履帶式計米基于同步帶傳動[1-2],一般無同步帶打滑檢測和誤差修正。基于多普勒效應的激光測速測長儀[3]是近年來出現的非接觸測量方法,該方法測量精度高,響應速度快,但不適合測量小直徑線纜,價格昂貴,不適用于惡劣工作環境條件。
提出一種新的卷繞系統大行程位移精密自動測量計米方法,采用雙同步齒形帶傳動副作為精確夾持傳送裝置。為了減小同步帶打滑引起的測量誤差,提高系統精度及可靠性,同時采用主動驅動計米和從動輪計米,主動輪由帶旋轉編碼器的交流伺服電機驅動,從動輪計米采用霍爾齒輪轉速傳感器。經過分析同步帶傳動多邊形效應引起的直線傳動位移誤差,提出采用加厚圓弧齒同步帶傳動以提高測量精度,并對同步帶打滑進行檢測和誤差修正。通過實際應用驗證所提出的測量方法及裝置的正確可行性和測量精度。
1 自動測量計米系統機構設計
1.1 自動測量計米系統構成
根據卷繞系統的結構構成、工作機理和工作特點,采用間接測量原理實現線纜放出和收回過程位移自動檢測。卷繞系統收放位移自動測量計米機構基于雙同步帶夾持傳送機構和測量傳感器,同時采用了主動驅動計米和從動輪計米兩種測量計米方法[4]。面向卷繞系統的大行程收放位移自動測量計米系統構成如圖1所示,主要由雙同步帶傳動夾持傳送機構、交流伺服電機主動驅動機構、測量傳感器、高速計數器和控制計算機等構成。
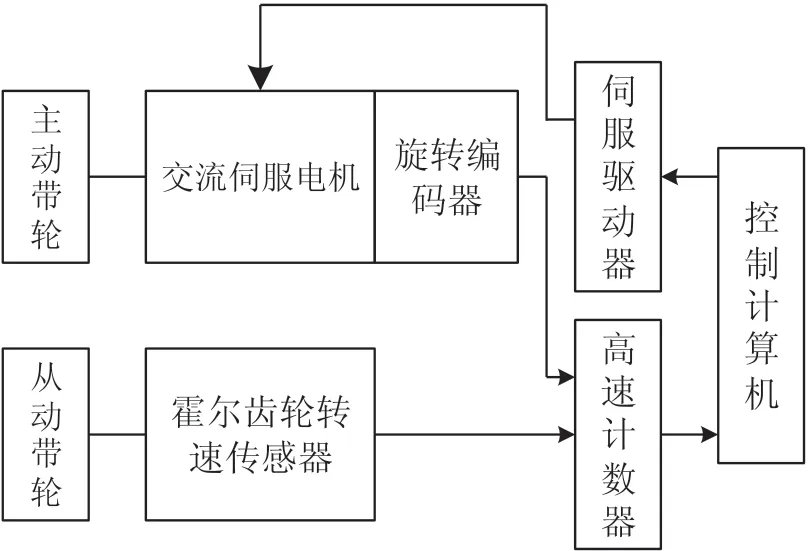
圖1 大行程位移自動測量計米系統構成框圖
1.2 雙同步帶夾持傳送機構設計
夾持傳送裝置是一種帶有夾持功能的傳送裝置,一般由皮帶和帶輪組成,大多數采用兩條皮帶將被傳送物品夾住進行傳送。同步齒形帶傳動屬于精密傳動,其傳動比準確,滑差小,傳動比恒定且范圍大,一般可達1∶10,傳動效率高達98%,傳動過程中線速度最大可達50 m/s。同步帶作為從動件實現運動和動力傳動,在各種精密儀器、精密機械設備中被廣泛使用。因此,本測量計米系統采用同步帶傳動實現被測線纜的夾持傳送和測量計米,該夾持傳送機構由兩條等長的并聯同步帶構成[5-6]。雙同步帶傳動夾持傳送機構3D模型見圖2。
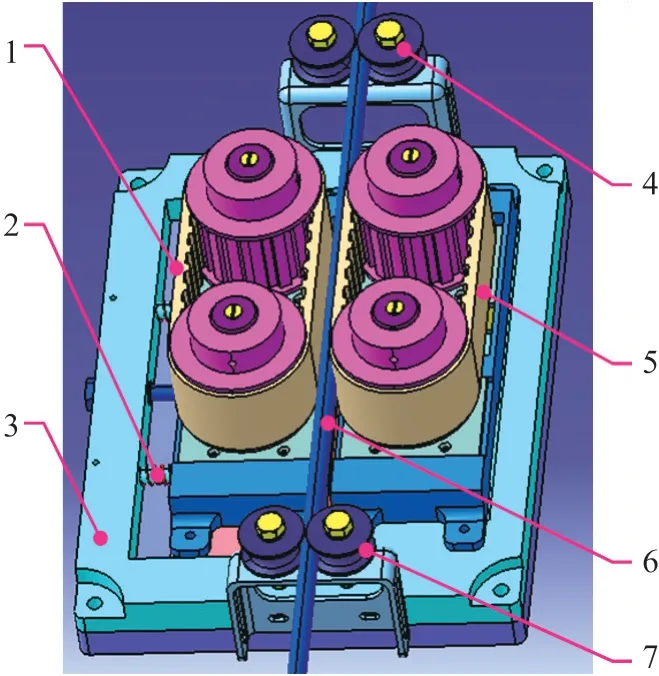
圖2 雙同步帶傳動夾持傳送機構3D模型
圖2 中,左、右兩對同步帶傳動副構成聯動機構,被測線纜從兩條同步帶之間通過。左右同步帶傳動副、線纜壓緊機構、前后引導輪對等安裝固定在支承框架上。左同步帶傳動副用于主動驅動計米,右同步帶傳動副用于夾持被測線纜及從動計米。線纜壓緊機構采用小型氣缸實現,通過壓緊機構施加適當的壓緊力,帶動左同步帶將被測線纜壓緊,使線纜被夾持于兩條同步帶之間,并與之同步移動,可以減小打滑。前后引導輪對用于保證被測線纜在夾持傳送過程中具有足夠的直線段長度。壓緊機構還用于在兩條同步帶與被測線纜之間提供合適的摩擦力,使被測線纜與同步帶輪相切。
采用雙同步帶傳動夾持傳送機構,大大增加了同步帶與被測線纜的接觸長度,從而解決因同步帶打滑而造成的計米不準確問題。
1.3 傳感檢測機構設計
自動測量計米系統傳感檢測機構如圖3所示。主動驅動計米是由安裝在左同步帶傳動副主動帶輪上的交流伺服電機和所帶的旋轉編碼器來實現的,而從動輪計米傳感器則安裝在右同步帶傳動副一側。左、右同步帶傳動副聯動機構安裝在支撐框架上,計米時由氣缸機構提供足夠的正壓力,使左同步帶傳動副聯動機構壓觸在被測線纜上,兩組聯動機構將被測線纜夾緊。當被測線纜經過兩條同步帶之間時,依靠兩條同步帶與被測線纜之間的摩擦力使被測線纜與兩條同步帶可靠接觸,并使被測線纜與同步帶輪相切,使被測線纜與同步帶同步直線運動,帶動同步帶和同步帶輪同步轉動,兩條同步帶的線速度相等,帶動從動輪的計米輪軸轉動。
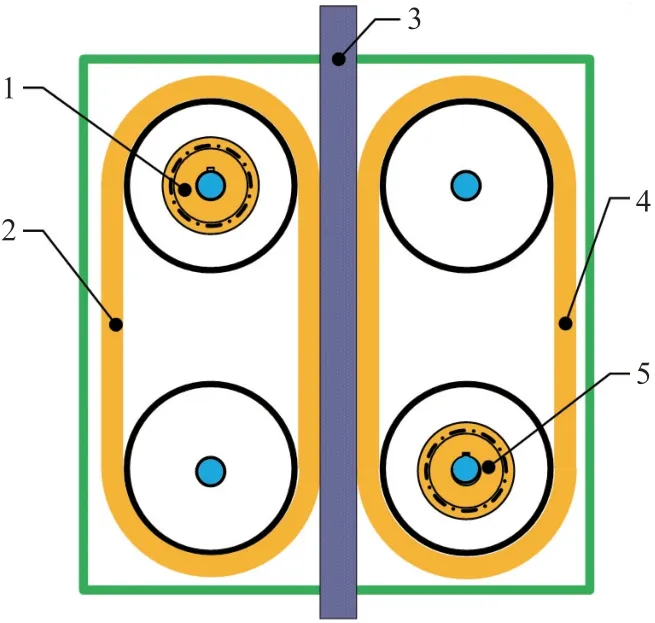
圖3 自動測量計米機構
①主動輪驅動計米
同步帶輪自轉、摩擦力和同步帶磨損等情況會引起打滑和失步,會導致測量誤差增大,為了減少和避免打滑和失步,提高測量精度,在同步帶傳動機構上設計了一個主動驅動裝置,以實現被測線纜與同步帶的同步跟隨運動及主動輪驅動計米。自帶旋轉編碼器的交流伺服電機不僅廣泛應用于運動控制,而且還廣泛應用于自動檢測領域,在實現運動控制的同時實現位移和速度檢測,因此本系統采用自帶旋轉編碼器的交流伺服電機實現主動驅動計米[7-8]。
主動輪驅動計米裝置由控制計算機、伺服驅動器、交流伺服電機和同步帶傳動副組成。左同步帶傳動副的主動輪安裝在帶軸端旋轉編碼器的交流伺服電機的輸出軸上,由交流伺服電機驅動主動輪旋轉,依靠同步帶帶動從動輪一起旋轉[9-10]。交流伺服電機往往都自帶旋轉編碼器,用于測量轉速和角位移,具有很高的角度定位精度,在交流伺服電機輸出軸上安裝同步帶輪,同步帶傳動可以將交流伺服電機的旋轉運動轉換成為同步帶的直線運動,可以在任意位置實現高精度定位[9-10],故本系統采用交流伺服電機進行主動驅動,同時利用交流伺服電機自帶的旋轉編碼器實現主動輪驅動計米。
②從動輪計米
從動輪計米可以通過齒輪轉速傳感器對同步帶輪旋轉過程中轉過的齒數計數來實現。齒輪轉速傳感器通常有光電式、電磁式、巨磁阻(GMR)、隧道磁阻(TMR)、霍爾式等多種原理[11]。霍爾式齒輪轉速傳感器基于霍爾效應,采用霍爾IC芯片,具有高可靠性、低功耗、對環境要求低等特點[12]。Honeywell公司生產的SNG-Q系列正交速度和方向傳感器基于兩路差分霍爾效應IC芯片,能夠同時提供速度和方向測量信息,其中速度大小由數字方波信號提供,方向則由相位差90°的正交信號提供,相位的超前或者滯后決定了測量目標運動的方向,它工作范圍廣、抗電噪聲能力強。因此,從動輪計米及辨向采用SNG-Q系列霍爾式齒輪轉速傳感器,以右同步帶傳動副的其中一個從動同步帶輪作為測量目標齒輪,霍爾齒輪轉速傳感器沿同步帶輪軸線方向安裝。傳感器測頭對準同步帶輪輪齒節圓,與同步帶輪端面的間隙(即氣隙)約為3.0 mm。
從動輪計米器工作時是被動受拉力而產生旋轉。在主動輪驅動機構和線纜牽引拖拽力的共同作用下,同步帶傳動副被動傳動,無主動動力源,同步帶的直線運動帶動同步帶輪(即測量目標齒輪)旋轉運動,被測線纜與同步帶同步直線運動,兩條同步帶的線速度相等。
③測量計米計算方法
在卷繞系統收放運動過程中,被測線纜帶動同步帶輪轉動,通過旋轉編碼器測量主動輪的旋轉角位移,通過霍爾齒輪轉速傳感器測量從動輪的旋轉角位移。
利用2個32位A-B相型雙計數輸入高速計數器分別對旋轉編碼器及霍爾齒輪轉速傳感器輸出的脈沖信號進行自動加減計數,放出線纜運動時進行加法計數,收回運動時進行減法計數。
由測量計米計算公式即可求出線纜的收放位移[13]:

式中:S(m-1)為上次收放完成后的線纜收放位移累計值,S(m)為本次收放完成后的線纜收放位移累計值,D為同步帶輪的節圓直徑,hs為同步帶帶高,本系統(D+hs)取90 mm。m為旋轉編碼器及霍爾齒輪轉速傳感器輸出的總脈沖數,PPR為旋轉編碼器及霍爾齒輪轉速傳感器的分辨率。
本系統主動輪計米采用16位分辨率的旋轉編碼器,其分辨率即單圈每轉輸出脈沖數為65 536。
2 自動測量計米系統精度設計
2.1 同步帶傳動精度設計
①同步帶傳動的多邊形效應及直線運動誤差分析
同步帶傳動誤差顯著影響自動測量計米系統的測量精度。影響同步帶傳動精度的因素很多,包括同步帶傳動的多邊形效應、帶及帶輪的節距偏差、同步帶彈性變形及其不均勻性引起的運動誤差、同步帶輪安裝偏心引起的誤差、返程誤差、帶傳動引起的振動及傳動誤差等[14-15]。多邊形效應是產生同步帶直線運動誤差的主要原因,此處僅分析討論同步帶傳動多邊形效應及其引起的直線運動誤差,并提出減小多邊形效應引起的誤差的措施。同步帶傳動的多邊形效應如圖4所示。
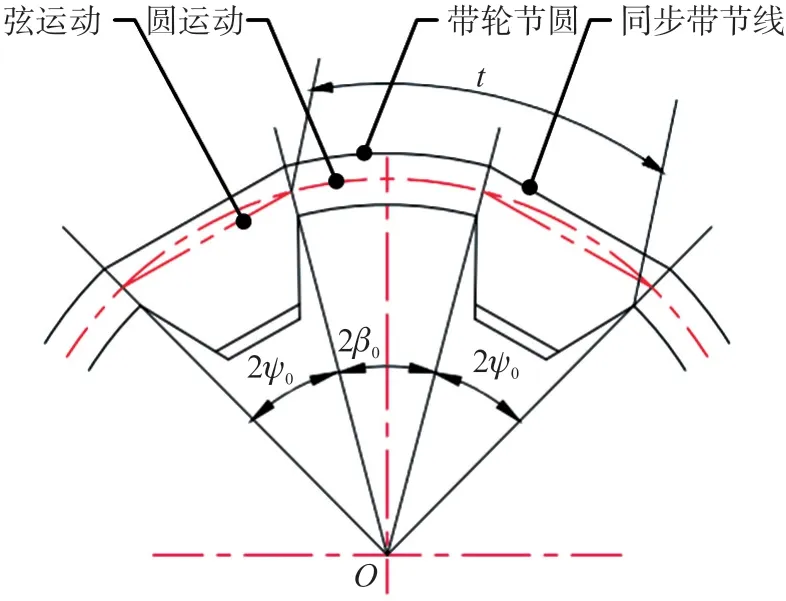
圖4 同步帶傳動的多邊形效應
由于同步帶輪上齒槽的存在,當同步帶繞在帶輪上工作時齒形帶與帶輪的實際接觸情況如圖4所示。在齒帶輪的齒厚部分,齒形帶的節線與齒帶輪的節圓完全吻合,齒形帶的運動為圓運動。而在齒帶輪的齒槽部分,齒形帶在張力作用下變成一直線,齒形帶的運動為弦運動。齒帶輪和同步齒形帶之間的嚙合關系是由弧運動和弦運動交替完成的,齒帶輪的轉動實際上是圓運動和弦運動相互交替進行的嚙合運動,變化周期為齒形帶和齒帶輪的一個節距。此現象稱為同步帶傳動的多邊形效應。在實際使用時,由于多邊形效應,同步帶輪的實際節距都是圓弧,而同步帶的實際節距由1段圓弧和1段直線組成,這就使得同步帶的節距大于帶輪的節距,從而造成傳動誤差[14-15]。
多邊形效應是影響同步帶傳動精度的一個重要原因。影響同步帶傳動精度的主要因素是多邊形效應的邊長,而不同齒形的同步帶產生的多邊形效應不同。
梯形齒同步帶傳動中,由于張力的原因,同步帶的齒頂不與帶輪的齒槽接觸,同步帶齒構成直邊,產生顯著的多邊形效應。齒形帶在帶輪的包覆區會形成一條直線加一條圓弧的形狀,同步帶的移動由弦運動和弧運動構成,因此產生一個移動誤差,即實際運動長度為弧運動長度與弦運動長度之和,移動誤差為弧運動長度與弦運動長度之差。圓弧齒同步帶的齒形與漸開線齒形近似,圓弧齒帶輪齒槽的底部為圓弧狀,在嚙合中能頂住同步帶齒的齒頂。圓弧形的齒頂與齒槽接觸,使同步帶齒和帶輪齒能更好的嚙合,使同步帶的帶齒彎曲,部分減少了帶齒引起的多邊形邊長,大大降低了多邊形效應,可有效提高傳動精度,使得圓弧齒同步帶傳動的嚙合性能和傳動性能得到進一步優化。
因此,圓弧齒同步帶的多邊形效應比梯形齒同步帶小得多,傳動精度比梯形齒同步帶高,而且傳動中噪聲、沖擊振動也小于梯形齒同步帶,使同步帶傳動變得更精確、更平穩、噪音更小。故本系統采用圓弧齒同步齒形帶。
②圓弧齒同步帶傳動設計
同步帶長度受材質的影響,必須選用熱膨脹系數和延伸率小的同步帶。同步帶常用的材質是橡膠和聚氨酯,聚氨酯同步帶具有低延伸率、在直線及有角度偏差的場合傳送精度高、穩定性高、耐磨性和耐老化性能好等優點,聚氨酯同步帶主要用于以傳遞運動為主、傳遞動力為輔的傳動裝置,在傳動過程中,承受載荷較小,但要求運動精確,所以對材料的要求變形量非常小,穩定性高。故本系統選用聚氨酯同步帶。
本系統中同步帶傳動作為夾持傳送和測量機構,負載功率較小,轉速較低,故選擇5M型圓弧齒同步帶,傳動比取1∶1。同步帶的寬度應大于被測線纜直徑,根據被測線纜的直徑范圍取同步帶標準寬為30 mm。同步帶與被測線纜的接觸長度等于同步帶傳動副的中心距,在確定接觸長度時,既要保證足夠的有效接觸長度,又要使兩帶輪之間同步帶懸空長度盡量短,以避免因兩帶輪之間同步帶壓緊力不一致而影響壓緊效果,因此應使之略大于同步帶輪外徑。同步帶輪與同步帶的齒形型號和節距等嚙合參數相同,先確定同步帶輪的齒數,再根據接觸長度以及同步帶夾持傳送機構的結構,確定同步帶輪中心距。同步帶節線長度是同步帶傳動設計精度控制的關鍵內容之一,根據同步帶輪齒數、中心距等參數計算確定同步帶節線長度。所選擇的圓弧齒同步帶的標記為280-5M30 JB/T 7512.1-1994,同步帶及同步帶輪的主要參數見表1和表2。
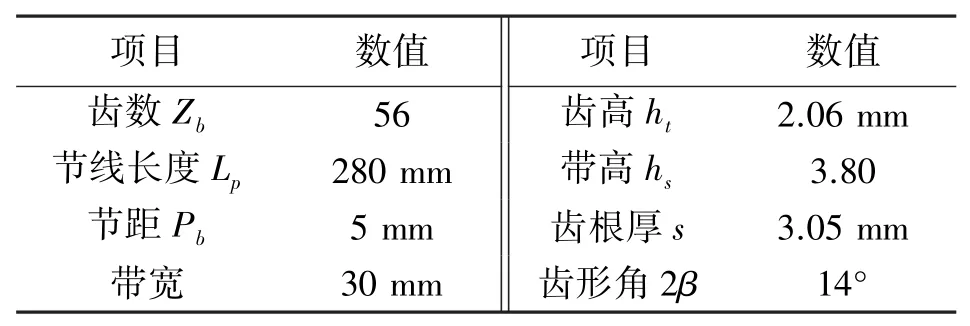
表1 280-5M30圓弧齒同步帶的主要參數
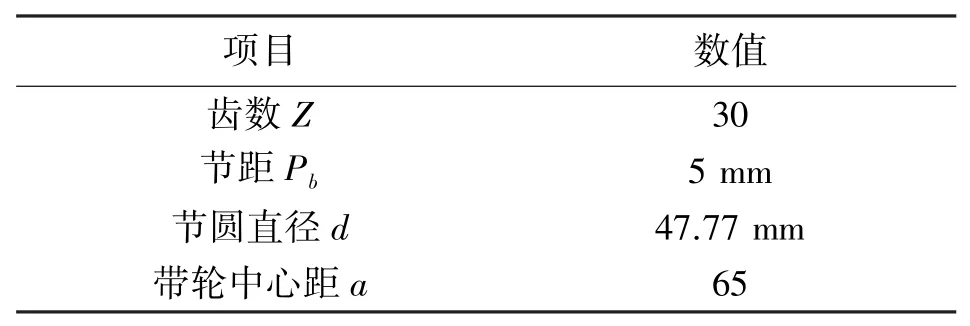
表2 5M30圓弧齒同步帶輪的主要參數
為了增大同步帶與被測線纜之間的摩擦力,增加兩條同步帶與被測線纜之間的接觸面積,加強同步帶對被測線纜的夾持作用,實現更精確的同步傳動,還采用了加厚的聚氨酯圓弧齒同步帶,將同步帶的標準帶高增加了5 mm。
2.2 同步帶打滑檢測及修正
在理想情況下,同步帶與同步帶輪之間無打滑,兩條同步帶夾持被測線纜一起同步運動。實際上由于受同步帶與同步帶輪之間的配合間隙、線纜壓緊機構壓緊力、帶輪摩擦因數等的影響,同步帶與同步帶輪之間有時會產生打滑現象[3,16],影響測量計米的準確性。同時采用主動驅動計米和從動輪計米的主要目的是為了減小同步帶打滑引起的測量誤差,提高測量計米精度。
在同步帶傳動過程中,同步帶打滑現象是不可避免的。主動輪由伺服電機直接驅動,在合適的張緊力作用下,同步帶與主動輪之間屬于輕微打滑,其影響可忽略不計。通過檢測主動輪和從動輪的實際轉速來檢測同步帶是否打滑,以當前同步帶打滑率和同步帶輪轉速比跳變作為同步帶是否打滑的聯合判據。
由于卷繞系統收放運動線速度較低,同步帶傳動的轉速也較低,一般不大于20 rpm,所以采用在給定時間內對旋轉編碼器和霍爾齒輪轉速傳感器的輸出脈沖計數的方法來測量轉速。該方法測得的是平均轉速,可以通過取較小的時間間隔,使之對轉速測量結果的影響可以忽略不計。
設主動輪、從動輪上編碼器和傳感器的分辨率分別為PPR1、PPR2。假設在Δt時間間隔內,主動輪、從動輪上編碼器的累計脈沖個數分別為m1、m2。
則主動輪的轉速n1為:

從動輪的轉速n2為:

同步帶夾持傳送機構的傳動比為1∶1,從動輪的理論轉速等于主動輪的實際轉速n1,同步帶打滑率δS為:

當同步帶打滑率大于設定閾值時,則認為同步帶有打滑。
兩個帶輪的轉速比k為:

無打滑時,轉速比為常數。當在Δti時間間隔內,當前轉速比ki與Δti-1時間間隔的轉速比ki-1之差大于設定值時,則認為轉速比有跳變,同步帶有打滑。此時,從動輪的實際計數脈沖個數m′2相對于其計數脈沖理想值m2的差值Δm為:

則打滑引起的位移誤差ΔS為:

從位移測量結果中扣去因同步帶打滑引起的位移誤差,即可得到更準確的位移。據此原理設計了同步帶傳動打滑檢測及實時修正應用軟件。
3 試驗驗證
根據本文所提出的測量方法制作完成的大行程位移自動測量計米系統實物照片如圖5所示。

圖5 自動測量計米裝置照片
基于比對測量方法對本自動測量計米系統按0 m、60 m和90 m分別做了3次重復收放試驗。分別采用本系統和精密鋼卷尺對線纜的放出、收回位移進行測量。兩種測量方法的收放位移實測數據見表3。
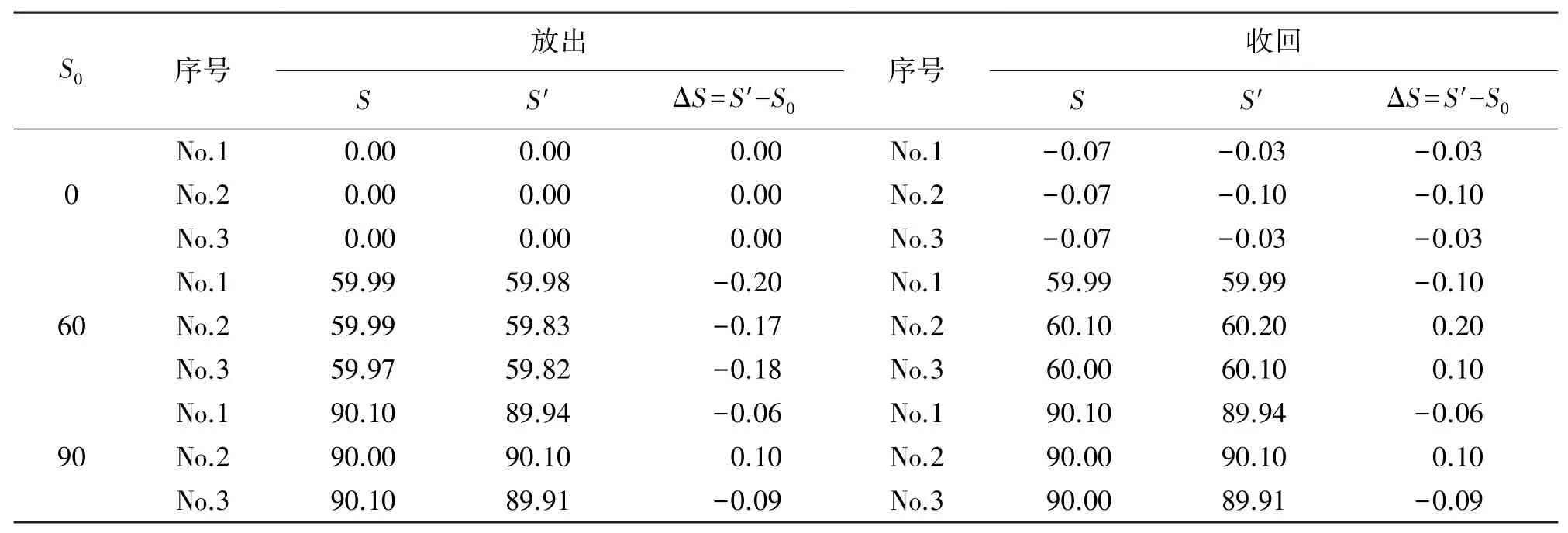
表3 收放位移比對測量數據 單位:m
表3 中,S0表示理想位移,S表示用本系統測得的收放位移,S′表示用鋼卷尺測得的收放位移,誤差為ΔS=S′-S0。比對測量實驗結果表明,本系統的最大位移測量誤差為±0.20 m/100 m。
在實驗中發現,線纜壓緊力對位移測量影響非常明顯。壓緊力過小則被測線纜與同步帶之間會產生打滑而引起位移測量誤差,甚至不能通過傳感器真實地反映被測線纜的實際位移;而壓緊力過大則會增加摩擦阻力,還可能使被測線纜表面劃傷和磨損。因而壓緊力大小必須調節合適。
本自動測量計米裝置已在某型飛機試飛空氣靜壓測量拖錐自動收放系統線纜收放位移檢測中使用。
4 結論
①提出并設計了一種卷繞系統大行程位移精密自動測量方法和裝置,該裝置以兩對同步齒形帶傳動作為精確夾持傳送裝置和測量機構,采用主動驅動和從動輪同時計米,主動輪由帶旋轉編碼器的交流伺服電機驅動,從動輪計米采用霍爾齒輪轉速傳感器。
②通過分析梯形齒和圓弧齒的多邊形效應引起的直線傳動位移誤差,提出采用加厚聚氨酯圓弧齒同步齒形帶傳動以提高測量精度。提出了一種同步帶打滑檢測及誤差修正方法,可自動判斷并且修正同步帶輪打滑引起的測量誤差,提高了測量精度。
③試用結果證明,該方法原理正確可行,位移測量誤差為0.2%。
④該大行程測量計米裝置結構緊湊簡單,可實現大行程雙向可逆計米,測量計米精度高,通用性好,可靠性高,還可用于其他卷繞式系統,如電線線纜、光纜、光電復合纜及鋼絲繩等工作過程的大行程直線位移動態準確測量。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00