基于機掃雷達對海模式下的數據處理策略
2021-10-21 08:06:50李萌王博
火控雷達技術 2021年3期
李 萌 王 博
(西安長遠電子工程有限責任公司 西安 710100)
0 引言
由于海洋探測環境較為復雜,對海雷達目標檢測與跟蹤技術面臨較多的局限性。尤其是雜波的干擾,不僅包含海雜波、氣象雜波等不同雜波種類,而且不同海情下的雜波分布具有極大的差異。此外,海面目標的運動速度較慢,雷達對其方位上的探測誤差較大,使得目標的運動趨勢難以獲取。提高目標跟蹤的穩定性和準確性是海上雷達亟待解決的關鍵問題。
在信號處理層面,一般采用動目標顯示(MTI)、動目標檢測(MTD)、恒虛警(CFAR)等方法抑制雜波[1]。但是,這些方法不能完全消除雜波,給數據處理帶來較高的誤報率,可能會導致誤航跡的產生。另外,當目標航跡在海上開始起批時,使用邏輯法不能很好地抑制雜波,造成了大量的假航跡。在傳統的海上監視雷達數據處理中,卡爾曼濾波方法由于檢測精度低,無法消除航跡抖動。
針對這些問題,本文提出了一種基于機掃雷達的數據處理策略,并針對海面目標的特點進行了適當優化。
1 對海模式下的數據處理策略
雷達數據處理是指雷達接收到信號處理上報的點跡后,進行相應的處理獲得目標航跡的過程,主要包括航跡起始、航跡關聯、濾波跟蹤等模塊。雷達工作于對海模式時,數據處理的各模塊需結合海上目標的特點選取合適的處理方法。
基于Hough變換的航跡起始算法可以在密集環境中有效起始目標航跡,但其需要的時間長;基于邏輯的航跡起始算法雖然能在較短時間內起始航跡,但在密集雜波環境中則很難起始目標的航跡。針對海雜波引起的虛警,結合海面目標直線運動的特點,可采用基于Hough變換和邏輯的航跡起始方法,將兩種算法結合起來,可有效解決上述問題。
數據關聯是跟蹤濾波的前提,也是數據處理的基礎。概率數據關聯算法(PDAF)的原理較為簡單,算法的復雜度較小,利用PDAF對雜波環境中的單目標進行跟蹤的優點是誤跟和跟丟的概率較小,因此選用PDAF完成目標跟蹤。
本文利用改進的卡爾曼濾波算法實現對海上目標的跟蹤。根據海面目標的運動趨勢較為穩定的特點,采用卡爾曼濾波算法進行濾波跟蹤,之后進行時域平滑處理。該數據處理策略可快速有效地建立穩健的航跡,提高海上目標的跟蹤精度,適用于實際工程應用。
2 對海目標數據處理模塊實現
2.1 基于Hough變換和邏輯的航跡起始
海雜波通常會帶來高虛警,并且雷達對目標方位上的探測誤差較大,結合目標運動狀態穩定、直線運動的特點,可采用基于Hough變換法的航跡起始。同時為了能夠快速起始航跡,本文采用基于Hough變換和邏輯的航跡起始算法。
考慮到海面目標一般是勻速運動的,若選用位移-時間作為參量,則海面目標運動可看作直線運動。因此選用時間-斜距數據進行Hough變換[2],得到候選航跡。
Hough變換直線檢測原理如式(1)所示。
ρ=rcosθ+tsinθ
(1)
將t-r平面中的所有點映射為θ-ρ平面中的一條曲線;通過判斷θ-ρ中各點的積累程度完成對t-r平面內直線的識別和檢測。
設海面目標的所有量測點數據為(tk,rk),k=1,2,…,N,由于海面目標的量測誤差大,這里宜選擇比較大的Δθ。經過Hough變換后,量測點在θ-ρ平面對應的曲線相交于同一點,經過積累閾值判斷提取出相應的候選目標航跡。
經過Hough變換的點跡粗關聯后,大量雜波點已被剔除,對于出現的點跡與點跡互聯模糊的情況,采用基于3/4邏輯法的航跡起始方法進一步進行點跡的關聯[3]。構成可能航跡的點跡數據必須滿足速度選通的條件, 如式(2)所示。
(2)
式(2)中:Δx為相鄰時刻兩點的距離差;Δt為相應的時間差;Vmin為海上目標的最小速度;Vmax為海上目標的最大速度。
此外,為防止低空目標航跡起始中的點跡關聯錯誤,還需在3/4邏輯法加入滿足高度限制的條件
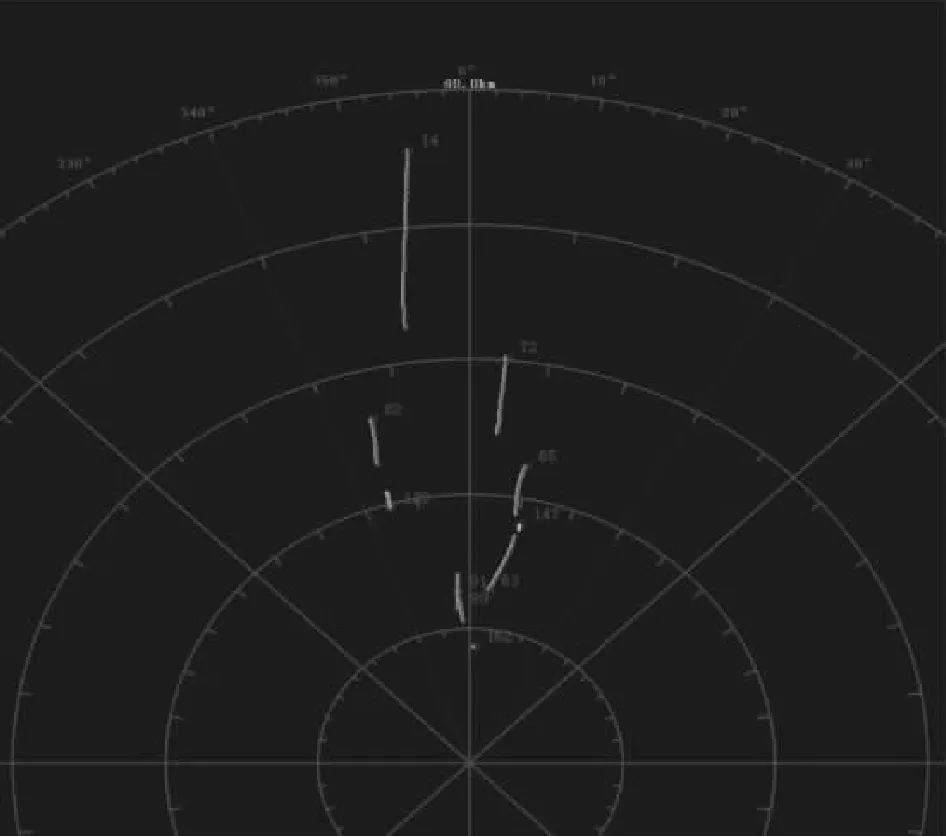
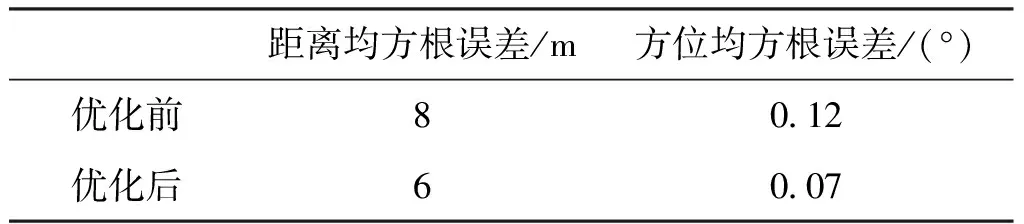
Δh (3) 式(3)中:Δh為待關聯的點跡與待起始航跡中最后一點的高度差;R為待起始航跡中最后一點的斜距;Δθ為俯仰測角精度;λ為系數,一般取λ=3。 跟蹤濾波是海面目標跟蹤過程中最為關鍵的問題,由于目標背景噪聲起伏以及目標運動特征的不確定性,需要針對其運動特性對跟蹤濾波算法進行適當的優化改進。 海面目標的運動狀態穩定,可看作勻速行駛,因此對其進行跟蹤濾波的關鍵在于如何降低雷達對目標的量測誤差。若采用標準的卡爾曼濾波算法,得到的航跡將會抖動較大,并且一般來說,抖動程度與目標距離成正比,與目標速度成反比,大大降低了雷達對海上目標的跟蹤精度和穩定性。針對此問題,本文提出相應的跟蹤濾波優化方法如下: 1)采用最小二乘曲線擬合法對目標的軌跡進行擬合,預測下一量測點位置,根據此預測值進行卡爾曼濾波; 2)利用多個量測點的方位信息進行時域平均以平滑目標量測的方位向抖動。 2.2.1 航跡擬合 海面目標的航向和航速是相對穩定的,其軌跡通常是光滑的[4],根據海上目標的運動狀態較為穩定的特點,采用卡爾曼濾波算法進行濾波跟蹤,之后進行時域平滑處理,得到目標航跡。 利用回歸分析的方法來獲取目標航向,具體表述為:對雷達量測數據進行擬合,目標航向即為對擬合后的方程求取的導數。出于工程實用性,采用最小二乘曲線擬合法,取M個量測點來擬合得到目標的軌跡方程[5]。擬合的精確度與M值成正比,計算量也與M值成正比,因此M值并不是越大越好,其選取準則與目標機動情況相關,如果目標運動狀態穩定,可以選取較大的M值,增強算法魯棒性;如果目標發生機動,則應當選取較小的M值,增強算法的靈活性。采用一階擬合方程為 y(x)=a0+a1x (4) (5) 求出使E最小的(a0,a1),即根據式(6)求函數E的極小值點為 (6) 擬合后的觀測序列可表示為 yi=y*(xi)+εi (7) 式(7)中,(xi,yi)為量測值在直角坐標系下的坐標,y*(xi)是yi的擬合估計值,εi為擬合值與真實值之間的誤差。 根據擬合后的軌跡,計算最后一個點跡在擬合方程中的導數,即航向的估計值θk為 (8) 根據當前的航向θk預測下一量測點位置X(k+1|k),之后根據此預測值進行卡爾曼濾波。 2.2.2 時域平滑 上文航跡擬合過程可視為空間上的平滑處理,經過該步驟后,目標航跡趨于穩定,此時對處理后的航跡繼續進行時域上的平滑處理可以得到更為穩定的航跡,提高雷達對海上目標的跟蹤精度和航跡穩定性。 在探測距離遠造成目標方位量測的誤差較大的情況下,對其方位角采用時域平滑處理:利用目標當前時刻方位值和航跡中前M個時刻的量測點方位角信息進行平均,以該平均值作為當前時刻目標的方位角估計。其中,如何選取M值的準則和航跡擬合中M的選取準則相同。 工程實現中,航跡擬合是為建立較好的跟蹤處理模型做準備,時域上的平滑是為了更直接地消除航跡抖動,這兩種策略均可改善海上目標航跡的精度和穩定性。 試驗時所使用的雷達系統采用X波段、脈沖多普勒體制。該系統主要由雷達主體、顯控終端兩部分組成,雷達主體和顯控終端以網線連接。其中,雷達主體包括天線陣面、收發機、信號處理機等,主要負責發射/接收電磁波信號,并對回波信號進行放大、變頻、A/D采樣、匹配濾波、動目標檢測、恒虛警處理,輸出目標及其點跡航跡;顯控終端主要負責對目標點跡航跡進行顯示,并根據需要對雷達進行參數設置和遠程控制。 試驗時雷達架設于某海邊高地附近,對往來船只進行探測跟蹤。所架設的雷達系統如圖1所示。 圖1 試驗時的雷達架設圖 采用本文的數據處理策略,使用雷達對高地附近主航道上的船只進行探測。在顯示控制終端上可以清楚地觀察到多條船只航跡,且均能與船舶自動識別系統(Automatic Identification System, AIS)數據吻合。試驗驗證,雷達可實現對70km內海上目標的檢測和跟蹤,試驗時航跡效果圖如圖2所示。 圖2 對海試驗航跡效果圖 雷達的探測距離越遠,探測精度越低,目標的跟蹤難度越大。反映在顯示終端上的現象是:距離越遠的船只,航跡抖動幅度越大。本文提出的針對航跡抖動的優化策略可有效解決此問題,相關航跡的濾波精度分析如下。 令(rship,θship)表示某時刻雷達探測到的船只目標信息(r為距離,θ為方位角),令(rAIS,θAIS)表示該時刻雷達探測到的船只目標在AIS設備上的對應信息(r為距離,θ為方位角)。則距離均方根誤差(RMSE_r)、方位角均方根誤差(RMSE_θ)可以定義為 (9) (10) 式(9)、式(10)中,N為目標航跡點數。 針對航跡抖動的優化前后的某條航跡的跟蹤濾波均方差如表1所示。 表1 優化前后航跡的濾波精度 根據表1中數據的對比情況可以看出,本文提出的優化策略對航跡的平滑效果顯著,可以實現海上目標的穩定跟蹤。 本文提出了基于機掃雷達對海工作模式下的數據處理策略。出于工程實用性的考慮,針對海面目標機動較小、直線運動的特點,本文采用基于Hough變換和邏輯的航跡起始方法,在快速有效起始目標航跡的同時減少了虛假航跡;本文提出的相關優化策略可有效解決雷達探測遠距離海上目標時出現的航跡抖動問題,并提高海上目標航跡的穩定性。通過雷達對海試驗驗證,此數據處理策略可以實現對海上目標的穩定搜索和跟蹤。2.2 針對航跡抖動的濾波優化

3 試驗結果分析
3.1 雷達系統介紹

3.2 實測數據分析
4 結束語
猜你喜歡
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
當代化工研究(2016年9期)2016-03-20 16:22:13
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
電子設計工程(2015年13期)2015-02-27 12:06:43