基于CenterNet 的實(shí)時行人檢測模型
2021-10-15 10:08:44姜建勇龍慧云黃自萌
計(jì)算機(jī)工程 2021年10期
姜建勇,吳 云,龍慧云,黃自萌,藍(lán) 林
(貴州大學(xué) 計(jì)算機(jī)科學(xué)與技術(shù)學(xué)院,貴陽 550025)
0 概述
行人檢測作為計(jì)算機(jī)視覺領(lǐng)域的研究熱點(diǎn)[1],在車輛高級駕駛輔助系統(tǒng)、視頻監(jiān)控、安全檢查以及反恐防暴等方面有著重要應(yīng)用。在過去的幾十年中,研究人員針對行人檢測問題做了大量研究并取得一系列成果。行人檢測方法主要分為基于人工設(shè)計(jì)特征和基于神經(jīng)網(wǎng)絡(luò)特征的2 種檢測方法。
傳統(tǒng)的檢測器多數(shù)使用HOG 方法進(jìn)行檢測,如文獻(xiàn)[2]通過改進(jìn)HOG 并且聯(lián)合使用SVM 進(jìn)行行人檢測。在傳統(tǒng)的檢測方法中,需要人工手動去提取圖像特征,使得檢測模型存在可擴(kuò)展性、泛化能力差以及計(jì)算速度慢等問題。
隨著在機(jī)器視覺中使用深度學(xué)習(xí),研究人員開始尋找深度學(xué)習(xí)方案來解決目標(biāo)檢測問題。R-CNN[3]提出結(jié)合深度學(xué)習(xí)的方法解決對象檢測的問題,后續(xù)很多兩階段的方法都是基于R-CNN[3]去構(gòu)建的,如Fast-RCNN[4]、Faster-RCNN[5]等。在行人檢測上,如文獻(xiàn)[6]使用更為快速的Faster-RCNN[5]進(jìn)行行人檢測,在Caltech 數(shù)據(jù)集上比其他傳統(tǒng)方法更為準(zhǔn)確和快速,文獻(xiàn)[7]使用單階段式網(wǎng)絡(luò)YOLO[8-10]進(jìn)行行人檢測,在INRIA 數(shù)據(jù)集上取得比傳統(tǒng)方法更好的準(zhǔn)確度。雖然Faster-RCNN 在RCNN 的基礎(chǔ)上改進(jìn)了很多組件,使得在準(zhǔn)確度和速度上有了很大的提升,速度能夠達(dá)到20 frame/s,但運(yùn)用在實(shí)時檢測中效果還不是很理想。而單階段網(wǎng)絡(luò)YOLO[8-10]在速度上很快,但是準(zhǔn)確度距離Faster-RCNN 相差較大。
CenterNet[11]與R-CNN[3]相比,不需要區(qū)域建議網(wǎng)絡(luò)以及ROI 等重要組件,而與YOLO[8]和SSD[12]相比,則無需預(yù)先去設(shè)定Anchor 的大小,并且CenterNet 在推理階段不需要NMS(Non-Maximum Suppression)[13],因此在速度上有很大的提升。為了能夠平衡檢測的速度和準(zhǔn)確度,本文基于CenterNet,提出PD-CenterNet 改進(jìn)模型對行人進(jìn)行檢測。該模型通過融合低級語義信息來減少細(xì)節(jié)性信息在下采樣過程中丟失的問題,并設(shè)計(jì)一個新的損失函數(shù)來解決正負(fù)樣本不平衡的問題。
1 PD-CenterNet 模型設(shè)計(jì)
目標(biāo)檢測往往在圖像上將目標(biāo)以軸對稱的框形式框出,成功的目標(biāo)檢測器都是先窮舉出潛在目標(biāo)位置,然后對該位置進(jìn)行分類,但這種做法浪費(fèi)時間、低效、需要額外的后處理。PD-CenterNet 在構(gòu)建模型時將目標(biāo)作為一個點(diǎn),即目標(biāo)BBox(Bounding Box)的中心點(diǎn),檢測器能夠通過特征圖的相對位置來估計(jì)出BBox 的中心點(diǎn)和尺寸。本文設(shè)計(jì)的PDCenterNet 主要由網(wǎng)絡(luò)結(jié)構(gòu)、Anchor 和損失函數(shù)3 個部分構(gòu)成,下文將圍繞這3 個方面進(jìn)行介紹。
1.1 網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計(jì)
PD-CenterNet 由主干網(wǎng)絡(luò)、上采路徑和網(wǎng)絡(luò)頂端2 個卷積組成,如圖1(b)所示。由于在目標(biāo)檢測中,感受野的大小在很大程度上直接影響檢測的效果,因此本文通過主干網(wǎng)絡(luò)來獲取一個1/32 的特征圖,編碼高層的語義信息。其中向下箭頭表示下采樣過程,向上箭頭表示上采樣過程。
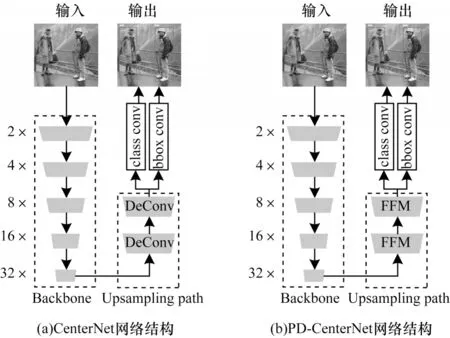
圖1 CenterNet 和PD-CenterNet 網(wǎng)絡(luò)結(jié)構(gòu)Fig.1 Network structure of CenterNet and PD-CenterNet
在網(wǎng)絡(luò)結(jié)構(gòu)上,使用主干網(wǎng)絡(luò)和上采路徑的設(shè)計(jì)方式能夠?yàn)檎麄€模型帶來很好的可擴(kuò)展性,通過主干網(wǎng)絡(luò)可切換為MobileNet[14]、ResNet18[15]、Xception[16]、ShuffleNet[17]等輕量級網(wǎng)絡(luò)即可獲得更快的速度,也可切換至ResNet101[15]、GoogLeNet[18]、DenseNet[19]等較大的網(wǎng)絡(luò)來獲取更高的準(zhǔn)確度。
在上采路徑上,BiSeNet[20]指出在特 征表示的層面上,低層和高層的特征表示不同,僅以通道來連接低層和高層特征,則就會帶來很多噪音,所以本文設(shè)計(jì)了一個特征融合模塊(FFM)來融合低層豐富的空間信息和高層的語義信息,如圖2 所示。在特征融合模塊中,首先將高層特征進(jìn)行上采至低層特征圖一致的大小,然后按通道進(jìn)行連接,后面緊接一個深度可分離卷積來學(xué)習(xí)通道上每一層的表示,最后使用類似于SENet[21]的通道特征注意力機(jī)制,把相連接的特征使用全局平均池化為一個特征向量,并學(xué)習(xí)出一個權(quán)重向量,然后對先前的特征進(jìn)行加權(quán),增強(qiáng)了低層和高層特征融合之后的表示能力,同時也減少了特征融合之后帶來的噪音。
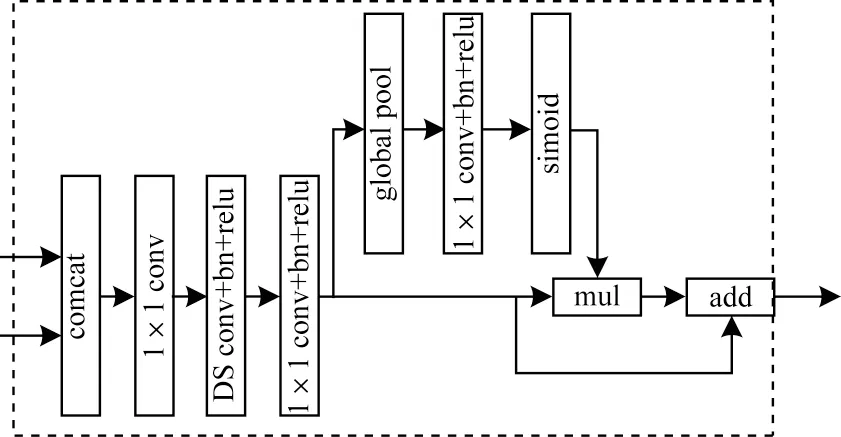
圖2 特征融合模塊Fig.2 Feature fusion module
在網(wǎng)絡(luò)頂端分別使用2 個卷積用來預(yù)測類別置信度、BBox 的位置和尺寸信息。
通過對網(wǎng)絡(luò)結(jié)構(gòu)的改進(jìn),使得模型的網(wǎng)絡(luò)參數(shù)和計(jì)算量大幅減少。尤其將MobileNet[14]作為主干網(wǎng)絡(luò)時使得模型的參數(shù)減少了50%,降低了計(jì)算量,在以ResNet[15]作為主干網(wǎng)絡(luò)時參數(shù)量和計(jì)算量也得到了很大的降低,具體的信息如表1 所示。
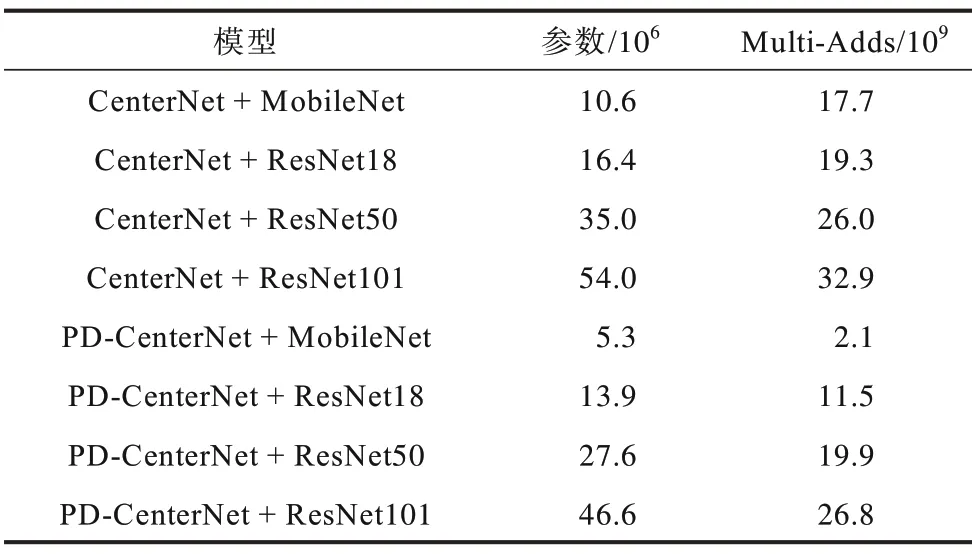
表1 模型參數(shù)及數(shù)量Table 1 Model parameters and quantity
1.2 Anchor 設(shè)計(jì)
在訓(xùn)練時獲得網(wǎng)絡(luò)輸出的類別置信度和BBox后,需要用BBox 去匹配GT BBox,在這個過程中,BBox 即為Anchor BBox。標(biāo)準(zhǔn)的Anchor 設(shè)計(jì)了在低分辨率特征圖中一系列固定的BBox,通過計(jì)算交并比(IoU)來判斷是否為正樣本,若交并比大于0.7 則標(biāo)記為正樣本,若小于0.3 則標(biāo)記為負(fù)樣本。而本文則將對象的中心點(diǎn)在低分辨率上所對應(yīng)BBox 作為正樣本,其他沒有包含對象中心點(diǎn)的標(biāo)記為負(fù)樣本,并且一個中心點(diǎn)僅檢測一個對象,如圖3所示。
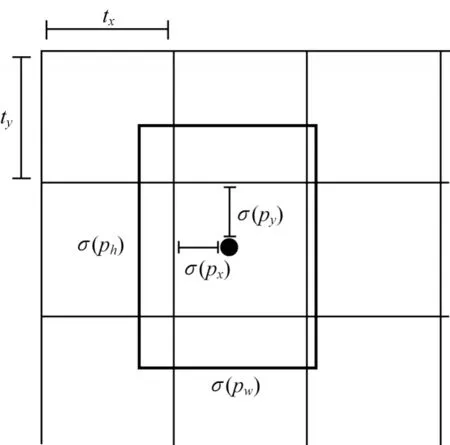
圖3 PD-CenterNet Anchor 的設(shè)計(jì)Fig.3 Design of PD-CenterNet Anchor
基于圖3 所示的設(shè)計(jì),網(wǎng)絡(luò)只需要預(yù)測在某一個單元格內(nèi)的偏移即可。對于網(wǎng)絡(luò)輸出的每一個BBox 為(px,py,pw,ph),其中:(px,py)為BBox 的中心點(diǎn)位置;(pw,ph)為BBox 的寬和高。如果該單元格對應(yīng)于圖像單元格左上角的坐標(biāo)為(tx,ty),則最后預(yù)測的BBox 為(bx,by,bw,bh),計(jì)算公式如下:

1.3 損失函數(shù)設(shè)計(jì)
PD-CenterNet 由BBox 的中心點(diǎn)、BBox 尺寸和BBox 類別置信度3 個部分損失構(gòu)成,計(jì)算公式如下:
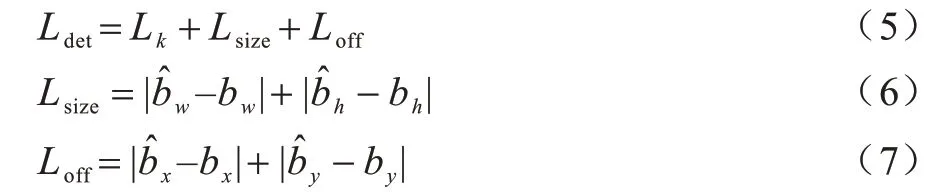
其中:Ldet為總損失;Lk為BBox 類別置信度損失;Lsize為BBox 尺寸損失;Lk為置信度損失;Loff為中心點(diǎn)損失。由于模型的輸入是300×300,因此最終得到一個75×75 的一個特征圖,并且模型一個特征點(diǎn)僅預(yù)測一個對象,極端情況下會出現(xiàn)1∶5 625 的正負(fù)樣本極度不平衡,所以,本文設(shè)計(jì)一個損失函數(shù)來解決這個問題。
在類別置信度損失中,本文設(shè)計(jì)α、γ、δ3 個影響因子提高正樣本的損失和減小負(fù)樣本的損失以解決正負(fù)樣本不平衡的問題,定義如式(8)~式(10)所示:


在負(fù)樣本損失中通過設(shè)置δ和γ12 個因子來減小負(fù)樣本的損失,定義見式(9),在正樣本損失中通過γ2進(jìn)行調(diào)節(jié),定義見式(10),最后通過α因子來控制正樣本和負(fù)樣本損失所占的比例。通過對損失函數(shù)中的α1、α2、γ1、γ2、δ使用網(wǎng)格搜索得到最佳的一組參數(shù),如表2 所示。
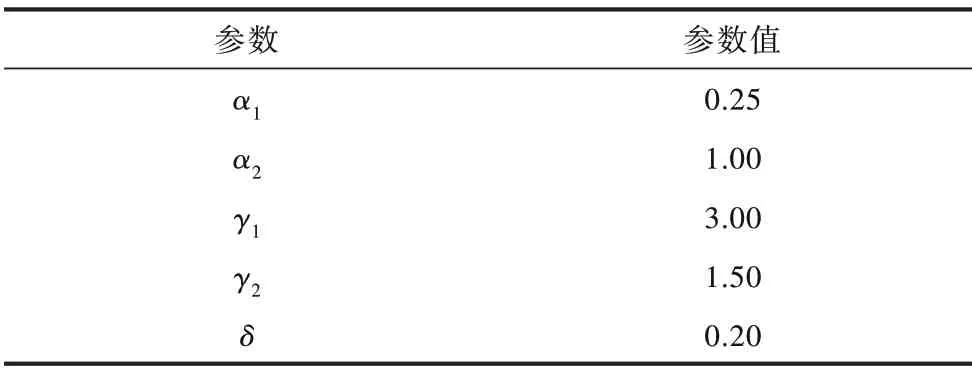
表2 損失函數(shù)參數(shù)值Table 2 Loss function parameter value
2 模型實(shí)現(xiàn)
2.1 網(wǎng)絡(luò)結(jié)構(gòu)
本文對殘差網(wǎng)絡(luò)(ResNet[15])進(jìn)行修改以適應(yīng)PD-CenterNet。選取 ResNet[15]網(wǎng)絡(luò)中“l(fā)ayer2”“l(fā)ayer3”和“l(fā)ayer4”的輸出分別作為“8×”“16×”和“32×”的特征圖,然后通過特征融合模塊來對這3 個特征圖進(jìn)行融合,接著在融合后“8×”倍的特征圖上通過反卷積上采到“4×”,最后通過網(wǎng)絡(luò)頂端的2 個卷積來進(jìn)行類別置信度和BBox 預(yù)測。
MobileNet 專注于移動端或者嵌入式設(shè)備中的輕量級CNN 網(wǎng)絡(luò),它使得推理速度能夠得到極大的提高。因此,修改MobileNet[12]作為本文模型的主干網(wǎng) 絡(luò),選 取MobileNet[12]中 第7 層、第14 層和最后 一個卷積層的輸出分別作為“8×”“16×”和“32×”的特征圖,然后通過上采路徑和2 個卷積來進(jìn)行類別置信度和BBox 預(yù)測。
2.2 Anchor 選擇
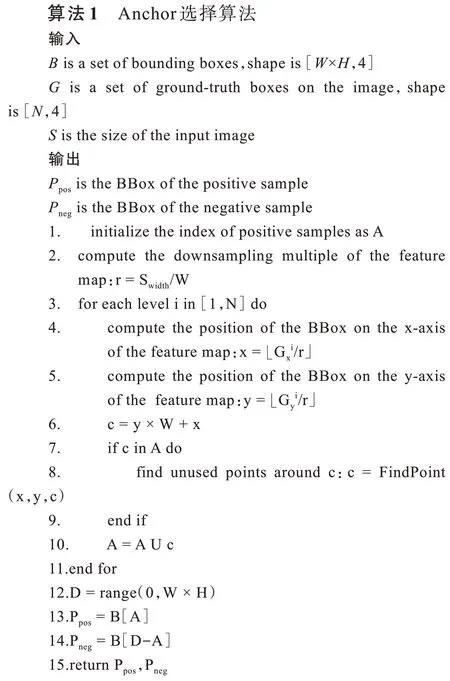
根據(jù)Anchor 的設(shè)計(jì),使得一個特征點(diǎn)僅能預(yù)測一個對象,如果一張圖像中有超過一個對象的中心點(diǎn)重疊,則導(dǎo)致模型存在漏檢。而由于在行人檢測中存在很多對象會存在中心點(diǎn)一致的問題,因此在Anchor 選擇時,如果BBox 被占用,則選擇離中心點(diǎn)最近的BBox 來預(yù)測對象,這樣就避免了中心點(diǎn)重復(fù)的問題,算法過程如下:
通過網(wǎng)絡(luò)的輸出得出B(W×H,4),其中B的寬和高在本文中為(75,75),第三維分別為BBox 的中心點(diǎn)位置(x,y)和大小(w,h)。對于GT(Ground Truth)中的每一個Gi,計(jì)算其在特征圖大小為(W,H)的中心點(diǎn)位置(x,y),然后計(jì)算出(x,y)在B上的索引c(見算法1第5 行)。如果c不在正樣本集合A中,則將c添加到集合A中,否則計(jì)算出離c最近的一個點(diǎn)并添加到集合A中。最后通過構(gòu)建一個D集合,其中D的區(qū)間為[0,W×H],此時正樣本Anchor為B[A],負(fù)樣本Anchor為B[DA]。Anchor 選擇算法如算法1 所示。
2.3 模型訓(xùn)練
訓(xùn)練使用分辨率為300 像素×300 像素的圖像作為輸入,對于輸入的圖像使用隨機(jī)翻轉(zhuǎn)、隨機(jī)縮放(0.5~1.5 的比例)、隨機(jī)裁剪和色彩抖動做數(shù)據(jù)增強(qiáng),使用學(xué)習(xí)率為1e?4 的Adam[22]作為優(yōu)化器,使用批大小為4 訓(xùn)練80 輪,其中前5 輪使用線性學(xué)習(xí)率進(jìn)行預(yù)熱,后75 輪使用余弦退火算法來對學(xué)習(xí)率進(jìn)行衰減,如圖4 所示。
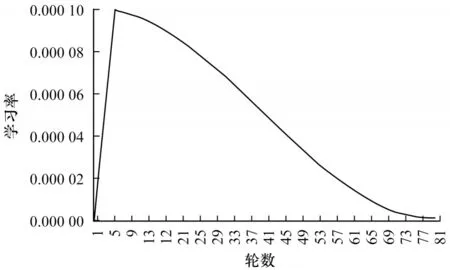
圖4 學(xué)習(xí)率衰減Fig.4 Decline of learning rate
2.4 推理階段
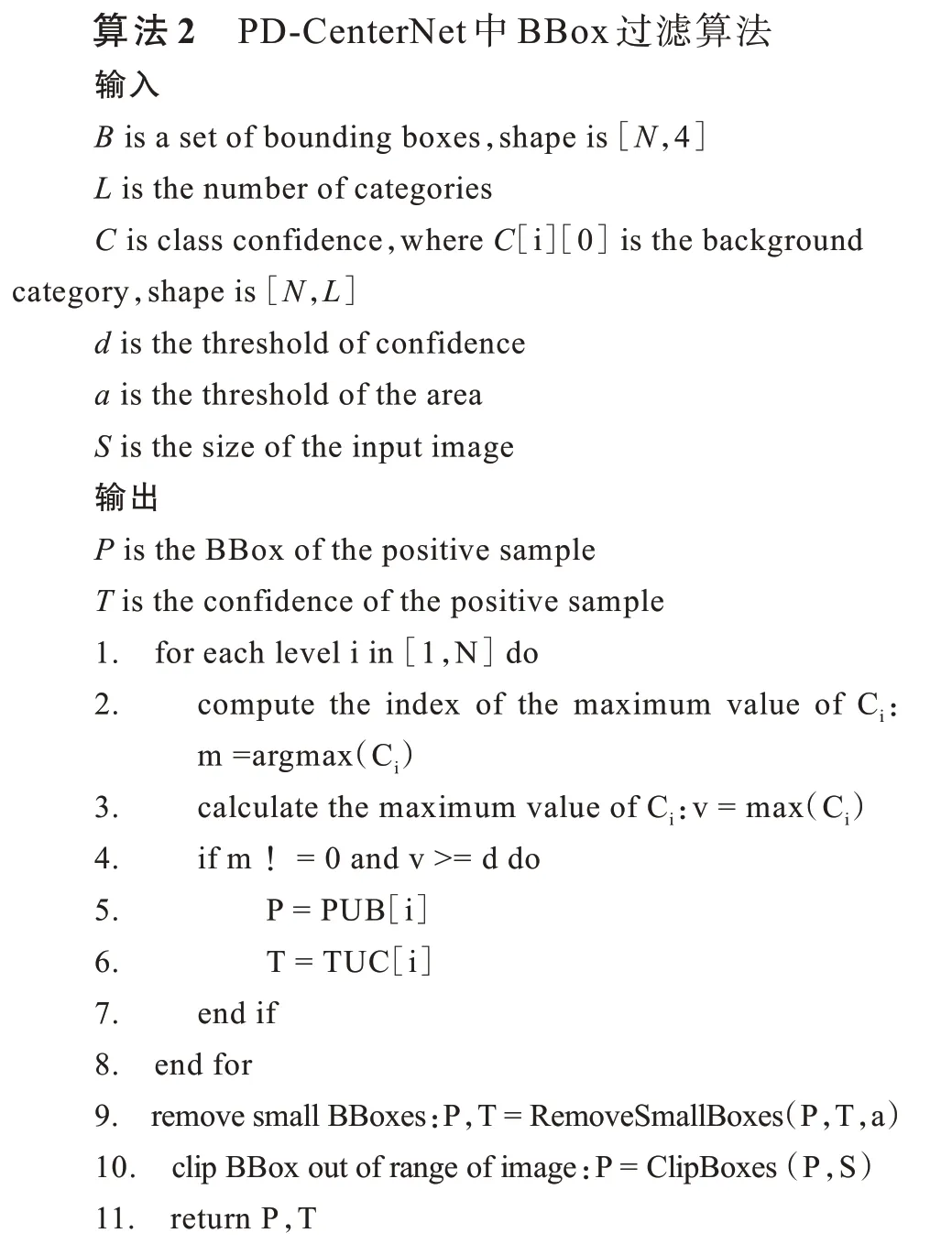
在推理階段不使用數(shù)據(jù)增強(qiáng),將輸入的圖片進(jìn)行等比例的縮放,其余的地方用0 進(jìn)行填充至300 像素×300 像素的輸入。目前大多數(shù)的目標(biāo)檢測模型都依賴于NMS[13]對模型最后輸入的BBox進(jìn)行篩選,由于NMS的時間復(fù)雜度為O(n2),因此使得在后處理階段變得更加耗時。結(jié)合本文模型的設(shè)計(jì),本文設(shè)計(jì)一種時間復(fù)雜度為O(n)的后處理算法,算法過程如下:
在模型的推理和模型的訓(xùn)練中規(guī)定類別置信度第一個位置的值為背景的置信度,在推理時設(shè)置一個置信度閾值d用來過濾置信度低的BBox。當(dāng)獲得網(wǎng)絡(luò)輸出的預(yù)測框B和類別置信度C時,則需要遍歷每一個Bi所對應(yīng)的類別置信度Ci,如果Ci的最大值位置為0 或者對象的置信度低于設(shè)置好的置信度閾值,那么就忽略該預(yù)測框,否則保存Bi和Ci作為最好的輸出,最后將面積特別小的預(yù)測框移除,以及將預(yù)測框超出圖像范圍的區(qū)域裁剪掉,最終的輸出即為對行人的檢測以及置信度,具體的實(shí)現(xiàn)如算法2 所示。
3 實(shí)驗(yàn)
3.1 數(shù)據(jù)集和環(huán)境
實(shí)驗(yàn)使用INRIA 行人數(shù)據(jù)集,它是當(dāng)前使用較為廣泛的靜態(tài)行人檢測數(shù)據(jù)集[23],具有拍攝條件多樣化、背景復(fù)雜、存在人體遮擋以及光線強(qiáng)度變化大等情況。
實(shí)驗(yàn)使用的深度學(xué)習(xí)框架為PyTorch,模型中的主干網(wǎng)絡(luò)ResNet 和MobileNet 均來自于torchvision 的實(shí)現(xiàn),實(shí)驗(yàn)使用的GPU 為Tesla P100 16G 型號。
3.2 實(shí)驗(yàn)過程
本文通過比較改進(jìn)后的主干網(wǎng)絡(luò)和損失函數(shù)進(jìn)行實(shí)驗(yàn)。實(shí)驗(yàn)采用不同的IoU 閾值計(jì)算平均精度(AP)去評價預(yù)測的結(jié)果,IoU 閾值的選取分別為0.50~0.95(AP)、0.5(AP50)和0.75(AP75)。
實(shí)驗(yàn)將原有的CenterNet、改進(jìn)后的PD-CenterNet和損失函數(shù)進(jìn)行對比,在實(shí)驗(yàn)中使用輕量級主干網(wǎng)絡(luò)MobileNet 和較大的ResNet 作為主干網(wǎng)絡(luò)進(jìn)行不同的實(shí)驗(yàn)。
第1 組實(shí)驗(yàn)使用原有的CenterNet 和Focal Loss 損失函數(shù),并在MobileNet 和ResNet 上進(jìn)行實(shí)驗(yàn),如表3所示。

表3 CenterNet 網(wǎng)絡(luò)和Focal loss 函數(shù)Table 3 CenterNet network and Focal Loss function %
第2組實(shí)驗(yàn)使用CenterNet來預(yù)測BBox和置信度,在訓(xùn)練時使用改進(jìn)后的損失函數(shù)來計(jì)算損失,如表4所示。
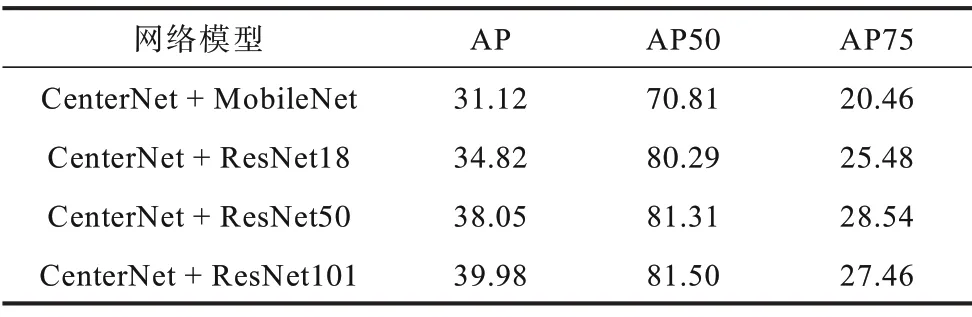
表4 CenterNet 網(wǎng)絡(luò)和改進(jìn)的損失函數(shù)Table 4 CenterNet network and improved loss function %
第3 組實(shí)驗(yàn)使用改進(jìn)后的預(yù)測網(wǎng)絡(luò)PD-CenterNet來預(yù)測BBox 和置信度,在訓(xùn)練時使用Focal Loss 來計(jì)算損失,如表5 所示。
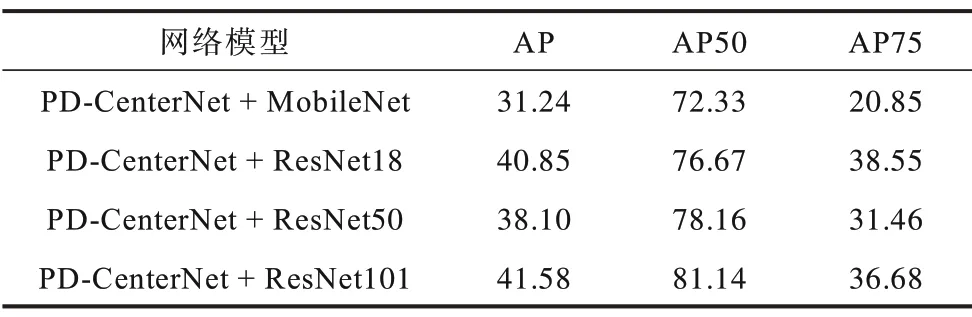
表5 PD-CenterNet 網(wǎng)絡(luò)和Focal loss 函數(shù)Table 5 PD-CenterNet letwork and Focal Loss function %
第4 組實(shí)驗(yàn)使用改進(jìn)后的預(yù)測網(wǎng)絡(luò)PD-CenterNet來預(yù)測BBox 和置信度,在訓(xùn)練時使用改進(jìn)后的損失函數(shù)來計(jì)算損失,如表6 所示。
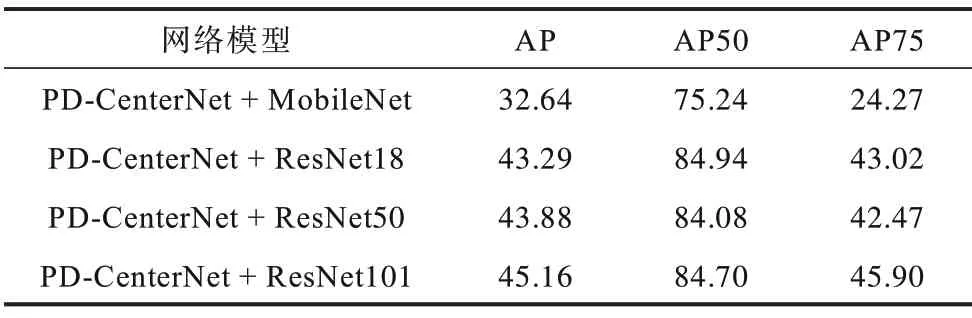
表6 PD-CenterNet 網(wǎng)絡(luò)和改進(jìn)后的損失函數(shù)Table 6 PD-CenterNet network and improved loss function %
3.3 結(jié)果分析
本文改進(jìn)的PD-CenterNet 相對于CenterNet 在準(zhǔn)確度上有了明顯的提升,最高提升了9.81%,如圖5 所示。改進(jìn)后的網(wǎng)絡(luò)結(jié)構(gòu)由于使用了特征融合模塊,所以在AP50 準(zhǔn)確度上提高了5.1%(見表3、表5),在AP準(zhǔn)確度上提高了1.23%,在AP75 準(zhǔn)確度提高了0.39%;改進(jìn)后的損失函數(shù)也相對于Focal Loss 函數(shù)[24]在使用ResNet18作為主干網(wǎng)絡(luò)時,AP50準(zhǔn)確度也提高了5.16%(見表3、表4),同時在AP 和AP75 準(zhǔn)確度上也都有著明顯的提升。最終改進(jìn)網(wǎng)絡(luò)結(jié)構(gòu)和損失函數(shù)在使用ResNet18 作為主干網(wǎng)絡(luò)時提升最大,在AP50 準(zhǔn)確度提升了9.81%(見表3、表6),在AP準(zhǔn)確度上提高了8.09%,在AP75 準(zhǔn)確度上提高了20.35%。
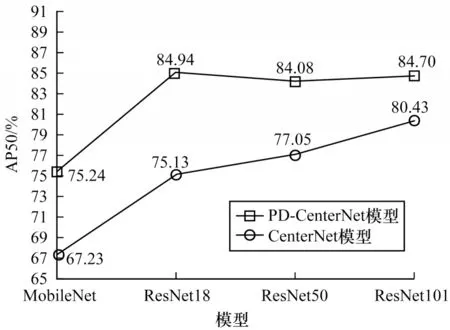
圖5 模型準(zhǔn)確度比較Fig.5 Comparison of model accuracy
ResNet 在所有主干網(wǎng)絡(luò)中平均精度最高,但相對于MobileNet 作為主干網(wǎng)絡(luò)在速度上相對較慢。ResNet18速度在ResNet系統(tǒng)中最快,達(dá)到136 frame/s(圖6),在AP50 準(zhǔn)確度上與ResNet50 和ResNet101持 平,但PD-CenterNet 在使用ResNet101 時AP 和AP75 最高。實(shí)驗(yàn)結(jié)果表明,主干網(wǎng)絡(luò)越大,則AP 和AP75 就越好,因此在對行人進(jìn)行檢測時也就更為準(zhǔn)確。
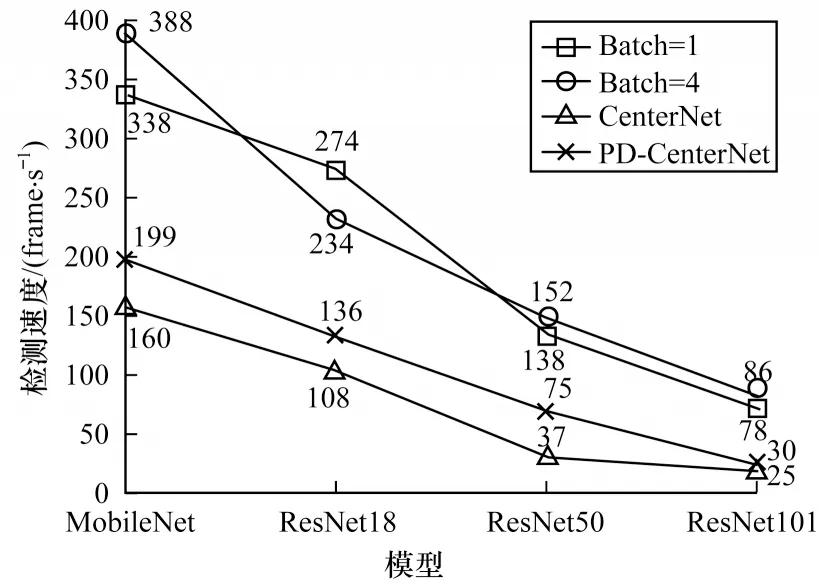
圖6 模型檢測速度比較Fig.6 Comparison of mode detectl speeds
MobileNet 相對于ResNet 在速度上優(yōu)勢更為明顯,能夠達(dá)到199 frame/s(圖6),但是在準(zhǔn)確度上低于ResNet,而改進(jìn)后的模型準(zhǔn)確度相比ResNet 提高了8.01%。
從上述實(shí)驗(yàn)結(jié)果可以看出,在網(wǎng)絡(luò)結(jié)構(gòu)中使用特征融合改進(jìn)后的PD-CenterNet,AP、AP50 以 及AP75 都具有較好的表現(xiàn);改進(jìn)后的損失函數(shù)也表現(xiàn)出了良好的結(jié)果。最終的檢測結(jié)果如圖7 所示,其中,第1 行為GT(Ground Truth),第2 行為模型預(yù)測的結(jié)果,在檢測結(jié)果中設(shè)置的置信度閾值為0.5。從圖7 可以看出,本文模型在大對象、小對象、對象重疊、密集對象等場景下仍然能獲得較好的結(jié)果。
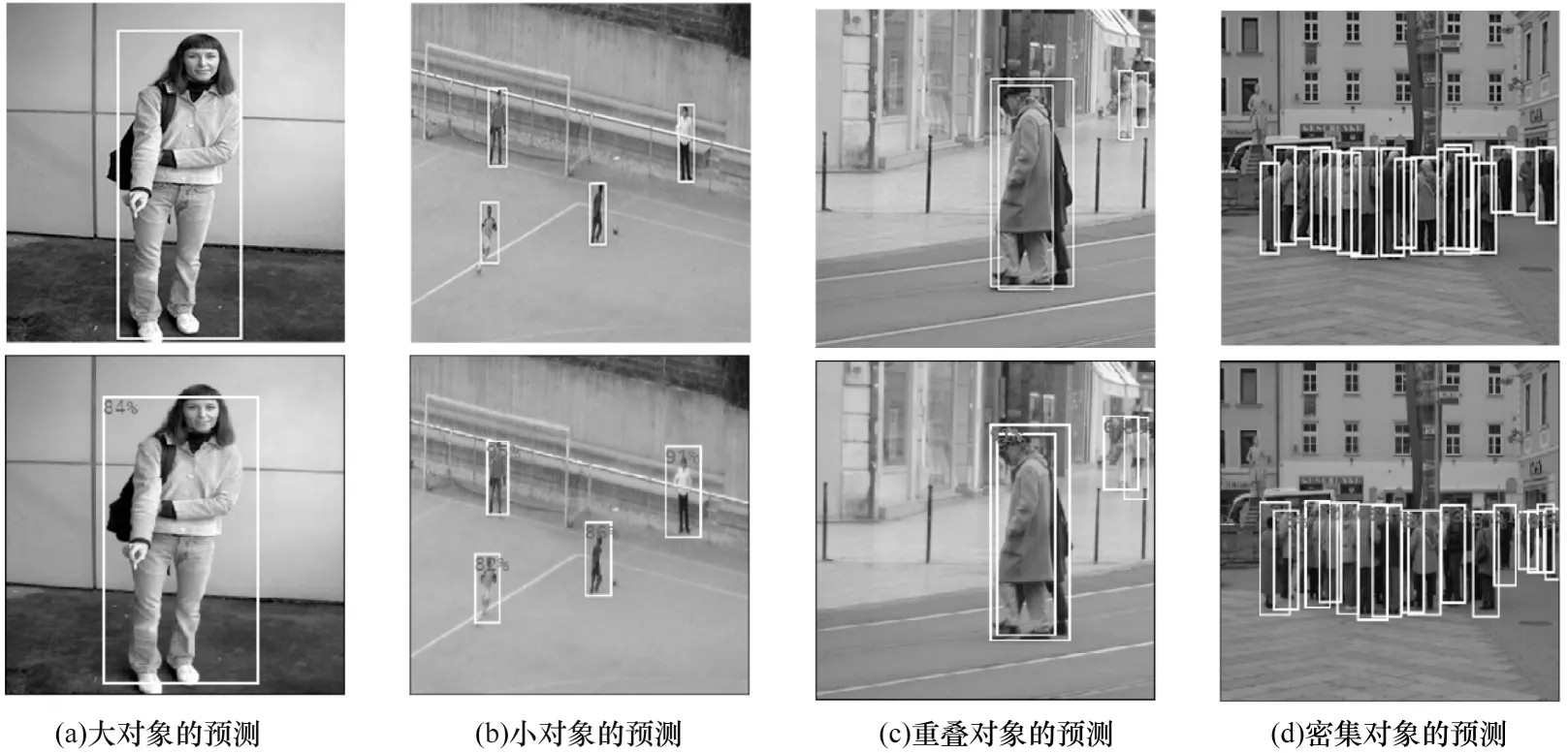
圖7 行人檢測結(jié)果Fig.7 Pedestrian detection results
4 結(jié)束語
為平衡行人檢測速度和準(zhǔn)確度的問題,本文提出一種基于CenterNet的行人檢測模型PD-CenterNet。在速度上設(shè)計(jì)一個輕量級特征融合模塊來減小網(wǎng)絡(luò)結(jié)構(gòu)中上采路徑的計(jì)算量,并在推理時降低后處理程序的時間復(fù)雜度。在準(zhǔn)確度上設(shè)計(jì)特征融合模塊對低層和高層特征進(jìn)行融合,并在損失函數(shù)中設(shè)計(jì)α、γ、δ3 個因子來改善正負(fù)樣本不平衡的問題。實(shí)驗(yàn)結(jié)果表明,該模型對行人檢測的AP50 準(zhǔn)確度為84.94%,檢測速度達(dá)到136 frame/s。本文在網(wǎng)絡(luò)設(shè)計(jì)時僅使用了2 個特征融合模塊,在小對象上的IoU 不是最優(yōu),因此提高小對象的IoU 將是下一步的主要工作。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19