基于改進YOLOv3-Tiny的目標檢測技術研究
2021-10-15 01:33:38張陳晨
兵器裝備工程學報 2021年9期
張陳晨,靳 鴻
(中北大學 儀器科學與動態測試教育部重點實驗室, 太原 030051)
1 引言
YOLO(you only look once)作為一種新的目標檢測算法[1],可以在保證高檢測精度的前提下提高檢測速度,該算法采用了端到端的檢測方式,不僅可以精確判別邊緣還可以辨別標簽,運用這種方式的檢測速度可以達到45幀/s的實時檢測,最新YOLO系列算法甚至可以達到155幀/s[2]。
對于YOLOv3-Tiny算法[3]眾人對其評價褒貶不一。在強大的YOLOv3算法性能影響下,YOLOv3-Tiny算法的輕量化版本雖然成本低,但并沒有展現出高效能,甚至還出現了檢測精度降低的情況,在很多場景并不能達到預期效果。目標檢測技術應用的3個主要領域是:安全系統、安保系統、金融系統[4]。目前,車輛識別主要采用模式識別和圖像分析技術[5]。本文采用改進后的YOLOv3-Tiny目標檢測算法實現對車輛的檢測,增加了YOLOv3-Tiny算法的實用性,在保證低成本的前提下,提高了Tiny算法對于車輛檢測效果的精度。同時,出于安全考慮,以普通車輛代替特種戰車,進行改進型算法的有效性驗證。
2 YOLOv3-Tiny目標檢測算法
2.1 目標檢測系統結構
隨著科技的發展,目標檢測以及生物識別技術進入大眾的視野,YOLO系列算法作為當前目標檢測最為流行的深度學習算法,得到廣泛研究和應用[6]。本次車輛檢測系統為實現低成本高效率而采用YOLOv3-Tiny目標檢測算法。系統結構見圖1。
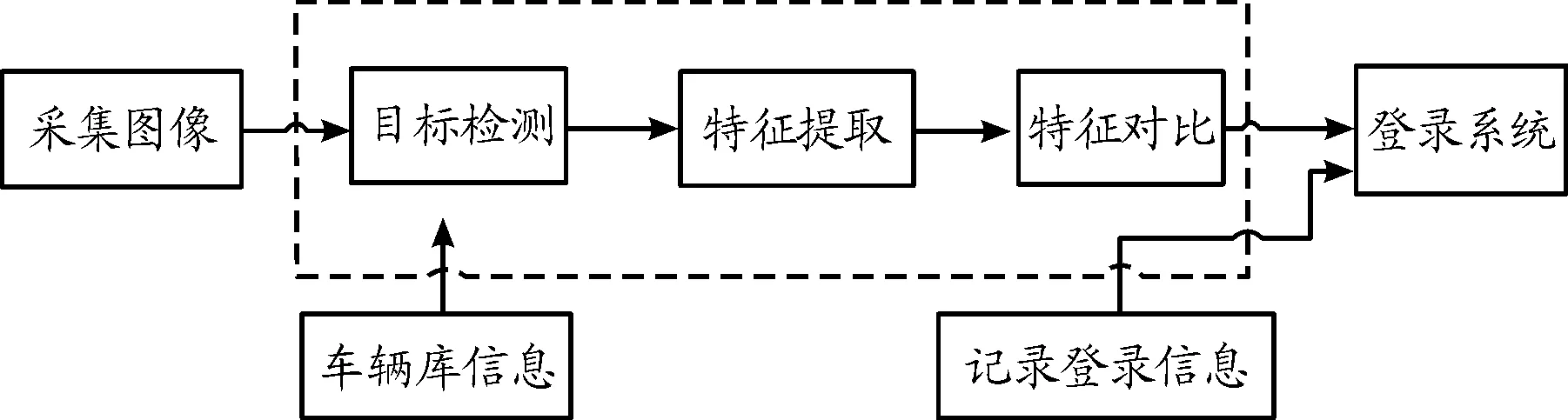
圖1 車輛識別系統結構框圖Fig.1 Structural framework of vehicle identification system
2.2 數據采集
此次實驗的圖片數據集借助照相機以每秒20幀的速度進行實地拍攝,實驗對象為識別檢測4種車輛。同時此次采集的圖像考慮了白天、黑夜、陰雨等多樣化天氣狀態,最終整理出4 091張圖片來制作本次實驗的數據集,數據集圖片像素為 1 024 540。
整理出4 091張圖片后,接下來需要運用LabelImg軟件對每一張圖片進行標注,使得可以生成與原圖相對應的標簽文件,標簽文件中記錄著每個對象的類別在對應圖片中的相對位置。
本次標注共有4種標簽,包括car、bus、truck、ignore_region,其中ignore_region的標注是為了避免歧義和降低標注成本。比如在采集的某些圖片中,存在較遠的大塊區域里包含有很多個其他類別的物體,因目標過小使得計算機不能很好的捕捉到其特征,所以對其進行標注沒有實際意義[7]。
2.3 YOLOv3-Tiny目標檢測算法
相比于YOLOv3檢測算法,Tiny系列的版本將整個網絡進行簡化,刪除了殘差層,只使用了2種不同尺度的yolo輸出層,在損失函數的選擇上包含坐標誤差(coordError)、IoU誤差(iouError)和分類誤差(classError)[8]。
在訓練過程中對損失值的計算如下:

YOLOv3-Tiny網絡模型結構如圖2所示。
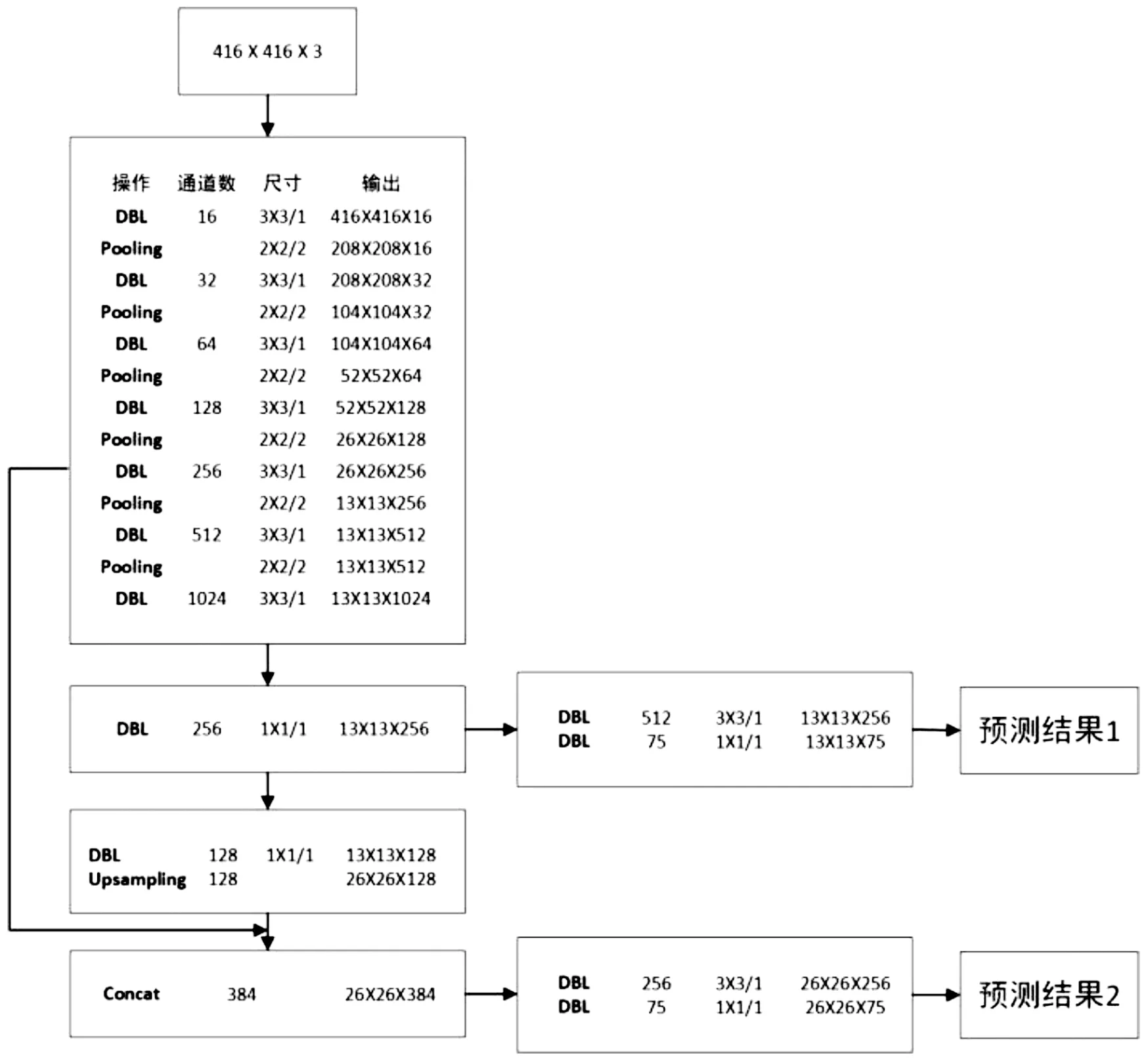
圖2 YOLOv3-Tiny網絡模型結構框圖Fig.2 YOLOv3-Tiny network model structure
由圖2可知,YOLOv3-Tiny模型采用了卷積與池化交替的結構,輸入經過卷積池化尺寸成比例降低,特征篩選是采取4個元素取1個元素的方式;對比于YOLOv3簡化了層級,而且輸出只有2層,所以Tiny網絡總體成本較低,雖然檢測精度低于YOLOv3算法,但是繼承了檢測速度快的優點[9]。
3 YOLOv3-Tiny模型改進
3.1 修改主干網絡
根據YOLOv3-Tiny網絡檢測效果的匹配問題[10],提出了相應的改進思路,因為數據庫為小樣本數據,所以發現特征流失嚴重,因為正負樣本標簽數目較少,在保證數據庫數據不變的情況下需要改變特征篩選的方式。
采用部分卷積層替換池化層的方式,適當增大輸入,經過計算改變輸入為448×448,卷積核步長為2,即保證了輸入尺寸成倍降低,達到相同效率,又減少了池化導致的特征流失。改進后的網絡模型結構如圖3所示。
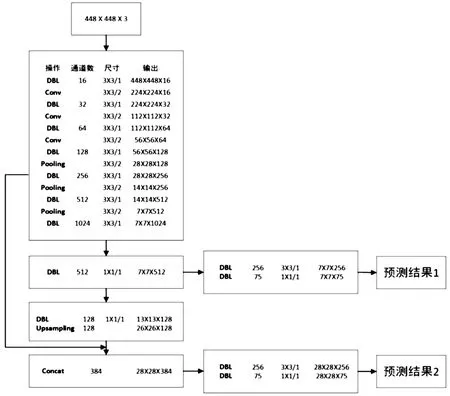
圖3 替換卷積層后的YOLOv3-Tiny網絡模型結構框圖Fig.3 Block diagram of YOLOv3-Tiny network model after replacing convolution layer
3.2 K-means聚類計算錨點(Anchor)
K-means聚類均值算法是對網絡的訓練和機器學習的無監督模式[11],用這種方法可以來計算錨點。錨點(anchor)是檢測框的中心點,往往在算法中歸為定值,不過隨著機器學習的發展,不同Anchor計算得到的不同精度值所造成的影響越發受人關注,因此可以動態調整Anchor是目前目標檢測算法的主流方向。K-means聚類如圖4所示。
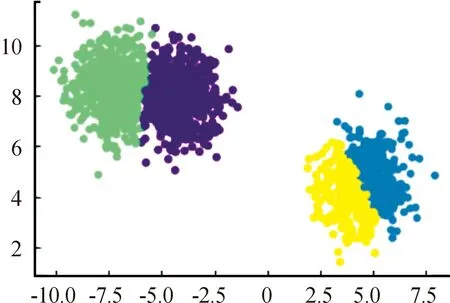
圖4 K-means聚類圖Fig.4 K-means cluster diagram
K-means算法步驟如下:
1) 從數據中選擇k個對象作為初始聚類中心;
2) 計算不同聚類物體到聚類中心的長短;
3) 再次計算每個聚類中心;
4) 計算標準測度函數,進行循環往復,直到達到最大迭代次數函數才會停止,為了加快函數收斂速度,可以指定最大迭代次數,提高效率;
5) 確定最優的聚類中心
iou=xy/d(box,clusters)
是為了計算參數iou(交并比),來判斷檢測框是否準確。
由圖4可知聚類的數目等于6,圖像的輸入尺寸等于448。
4 實驗驗證
4.1 實驗環境
本次實驗使用的操作系統版本為64位Ubuntu 18.04 LTS的Linux操作系統,主要的機器硬件配置為四核四線程英特爾酷睿i3-9100F CPU,選擇darknet為本次實驗的深度學習框架,數據集圖片由人工實地采集,制作成類VOC數據集共4 091張圖片,再以6∶2∶2的比例將圖片劃分為訓練集、測試集以及驗證集。設置輸入為448×448,初始學習率為0.001,最大迭代次數為25 000,采用動態調整學習率的方式在第4 000、8 000批次下對學習率進行成倍衰減。
4.2 車輛檢查結果分析
經過聚類算法得到的Anchor如圖5所示,(12,18),(10,7),(4,26),(29,17),(10,14),(7,37)共6類。改進前后的檢測效果如圖6所示,檢測前后的平均精度如下:

圖5 得出的AnchorFig.5 The resulting Anchor
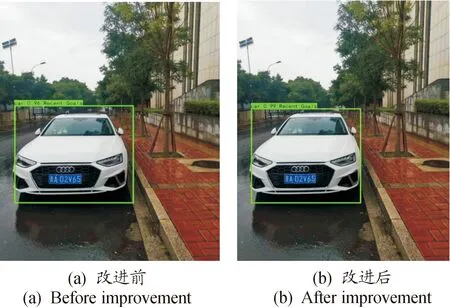
圖6 改進前后的檢測效果Fig.6 Test results before and after improvement
檢測前:Bus: 0.76132358873
Car: 0.860279633443
Ignore_region: 0.190031117096
Truck: 0.774514273566
****************************
Map: 0.839441153998
檢測后:Bus: 0.80847090384
Car: 0.899464888
Ignore_region: 0.396268242427
Truck:0.861581049064
****************************
Map: 0.841446270832
檢測前后的預測框準確率:
檢測前:[ [0.02539062 0.02592593]
[0.04003906 0.04444444]
[0.01855469 0.04074074]
[0.0078125 0.01296296]
[0.04492188 0.08703704]
[0.01269531 0.02037037]]
Accuracy: 89.72%
檢測后:[ [0.02636719 0.06481481]
[0.04003906 0.03888889]
[0.02246094 0.02222222]
[0.01464844 0.03148148]
[0.00976562 0.01666667]
[0.05859375 0.08148148]]
Accuracy: 90.60%
改進前后YOLOv3-Tiny的檢測結果對比如表1所示,改進前后YOLOv3-Tiny的各類別車輛檢測效果如表2所示。
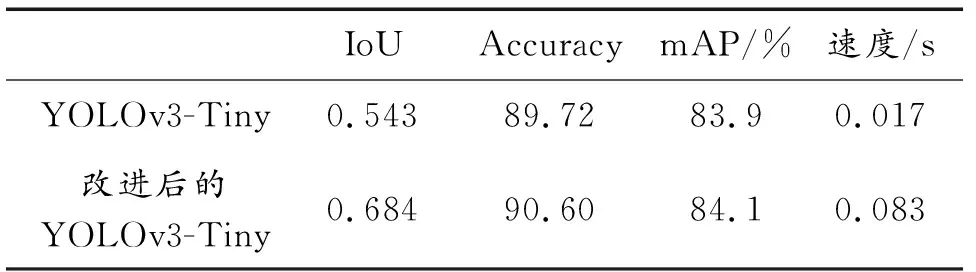
表1 改進前后YOLOv3-Tiny的檢測結果Table 1 Detection results of YOLOv3-Tiny before and after improvement
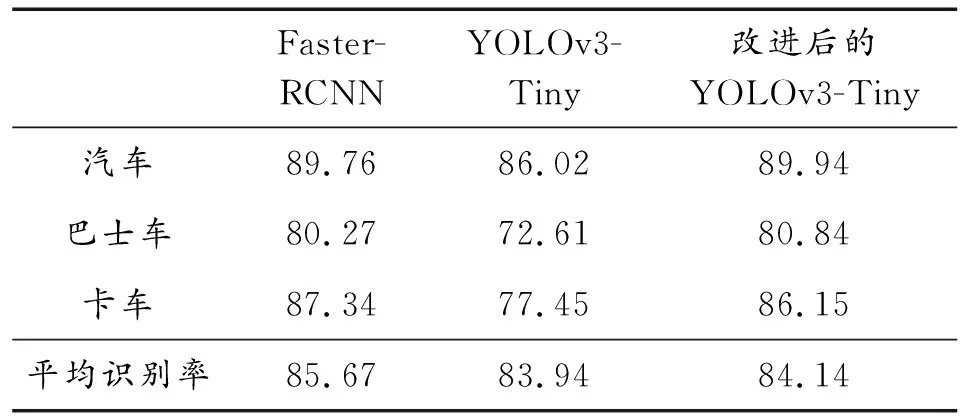
表2 改進前后YOLOv3-Tiny的各類別車輛檢測效果 %
目標檢測算法中主要的評價指標如下:
1) mAP(mean average precision)。可以用來判斷預測框的類別標簽是否準確和定位坐標是否精準的指標。
2) IoU(intersection over union,交并比)。是目標檢測算法中2個不同檢測框之間存在的相似度的判斷指標。
通過上述數據對比可以得出,改進后的YOLOv3-Tiny模型整體檢測結果相較原模型有了明顯的提升,交并比(IoU)提升了14%,整體準確率提高了0.88%,平均檢測率(mAP)提高了0.2%,但是速度有所降低。
在不同目標的識別率上,改進后的YOLOv3-Tiny模型對比原模型在小目標的識別率提高了3.92%,大目標的識別率提高了8.23%,中大型目標的識別率提高了8.7%;由此可見,改進后的YOLOv3-Tiny模型整體性能有了明顯提高,犧牲了少許檢測速度而提高了精度,改進的主干網絡減少了在池化層中特征點的大量丟失。
5 結論
本文提出了對YOLOv3-Tiny算法的改進,改進后的YOLOv3-Tiny檢測算法整體準確率提高了0.88%,mAP提高了0.2%,對于中大型目標的識別率有明顯提升,中型目標的識別率提升了8.23%,大型目標的識別率提升了8.7%。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(2016年3期)2016-05-17 04:32:12