特種車輛快速展開系統的并行工作規劃與仿真
2021-10-15 01:33:04周伯俊于傳強姜曉明
兵器裝備工程學報 2021年9期
周伯俊,于傳強,劉 建,姜曉明,柯 冰
(1.火箭軍工程大學, 西安 710025; 2. 91049部隊, 山東 青島 266000;3.火箭軍裝備部, 北京 100085)
1 引言
車輛調平是通過安裝在車體上的4個支腿快速伸出著地實現,其目的是給后續作業提供一個水平基準和剛性支撐,保證作業的精度和穩定性[1-4]。負載起豎是通過鉸接安裝在車體和負載上的液壓缸的伸出,將負載由近似水平狀態支撐至垂直狀態[5]。并且在起豎到位后負載保證一定的垂直精度[6]。目前,特種車輛的展開作業普遍采用串行工作的方案,車輛完成調平后,再進行負載起豎作業,為縮短該方案的車輛展開時間,許多學者分別圍繞調平和起豎兩個過程,開展了大量卓有成效的研究工作[7-9]。隨著形勢變化,對特種車輛展開作業的要求也發生變化,主要體現在兩點:一是對展開時間的要求更加苛刻,展開時間從之前的幾分鐘縮短到幾十秒,并行工作就變成了需要考慮的問題;二是對展開的精度要求降低了。基于以上變化,本文提出車輛調平與負載起豎并行工作的特種車輛展開方案,將調平與起豎兩個過程重新進行規劃,在車輛調平的同時,負載就開始起豎,以達到進一步縮短車輛展開時間的目的。為保證調平精度,調平支腿選用電動缸,調平過程采用基于模糊PID控制的調平策略,通過改進調平策略進一步保證車輛的調平精度不受并行工作的影響。為保持車輛展開過程的穩定性,在調平過程進入平穩伸長階段時進行起豎,通過建立數學模型對支腿載荷與起豎油缸載荷進行仿真計算,分析并行工作對車輛穩定性的影響,以驗證調平過程與起豎過程并行工作的可行性。
2 調平與起豎過程運動規劃
該型特種車輛結構組成如圖1所示,主要由車體、調平支腿、起豎油缸、負載等部分組成。負載與特種車輛及起豎油缸通過鉸鏈相連接,負載可繞車輛尾部支點旋轉。
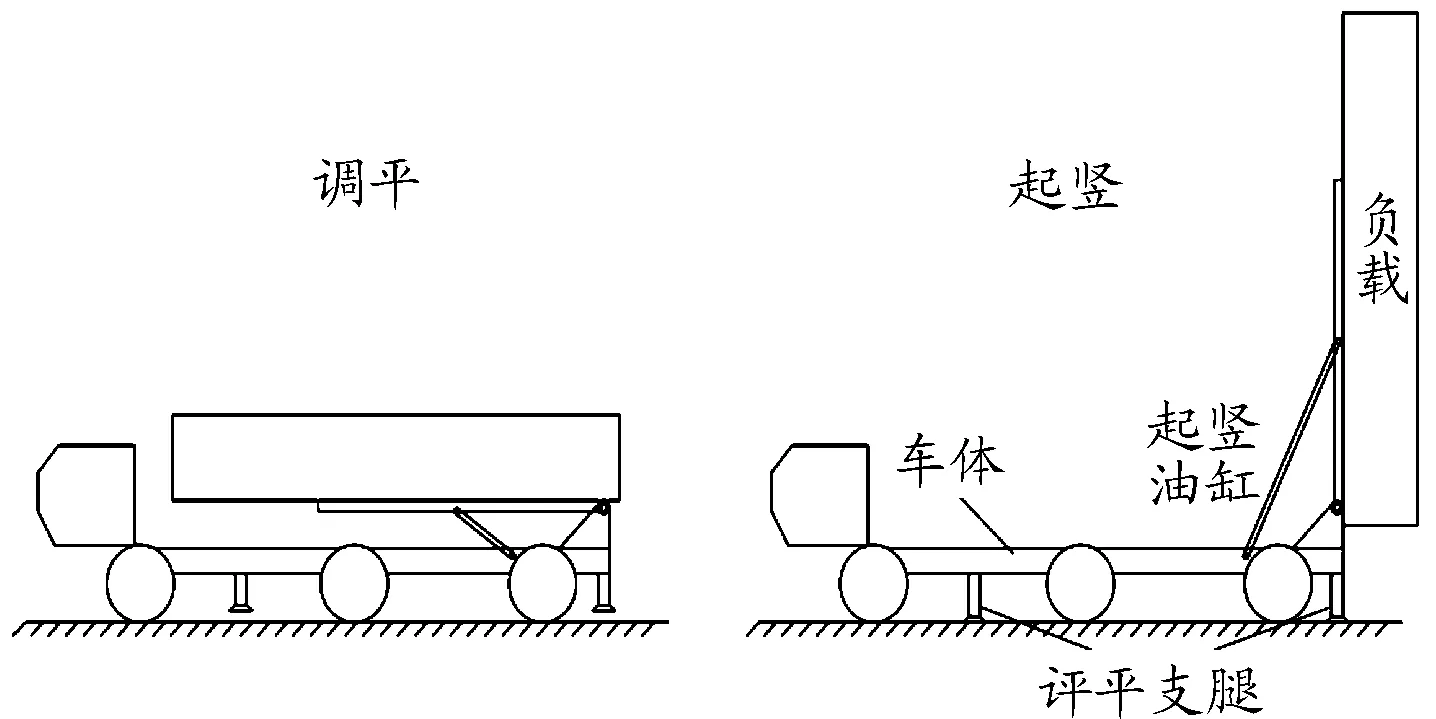
圖1 某型特種車輛示意圖Fig.1 Schematic diagram of a certain type of special vehicle
2.1 調平過程
本文所采取的調平方案分為2個階段,調平過程如圖2所示。圖2中的1、2、3、4分別表示4個調平支腿的位置,矩形方框表示兩個調平階段結束時支腿到達的位置。
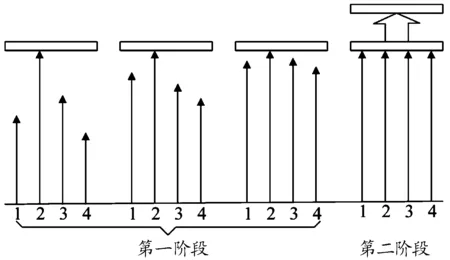
圖2 調平過程示意圖Fig.2 Schematic diagram of the leveling process
第一階段采用三點逐高調平法。傳統三點逐高調平法為保持最高點不動,其余3個支腿依次伸出到達最高點,該方法所用調平時間較長。本文對此進行了改進,采用3個支腿同時伸出的三點逐高調平法策略,具體步驟如下:依然保持“最高點”不動,根據角度傳感器實時檢測到的車體傾角值,計算出其余3個支腿到最高點的位置差,再將此位置差值作為各支腿模糊PID控制器的控制信號,并將控制信號與當前實際位移值比較得出誤差e,模糊PID控制器再通過誤差e計算出控制各支腿上升的距離,使各支腿同時以不同速度與加速度伸到同一高度,平臺最終達到水平狀態,由于支腿同時伸出,所以縮短了調平時間[10]。
第二階段采用4條支腿同步伸出策略。實際工作中對特種車輛車體離地距離有一定要求,因此,在調平第一階段結束后,車體已經處于水平狀態,根據當前車體離地距離與要求距離的差值,并將此差值作為模糊PID控制器的控制信號,控制4條支腿等速與等加速度同步伸出,以保持水平狀態不發生變化。傳統調平策略在此階段采用4條支腿勻速伸出,本文為避免調平結束時由于支腿速度的突然變化產生劇烈振動,4條支腿勻減速同步伸出,當達到指定位置后,再切斷控制信號,支腿鎖定,平臺位置固定,調平過程結束。
2.2 起豎過程
起豎裝置運動圖如圖3,在起豎油缸作用下繞O點進行旋轉運動。
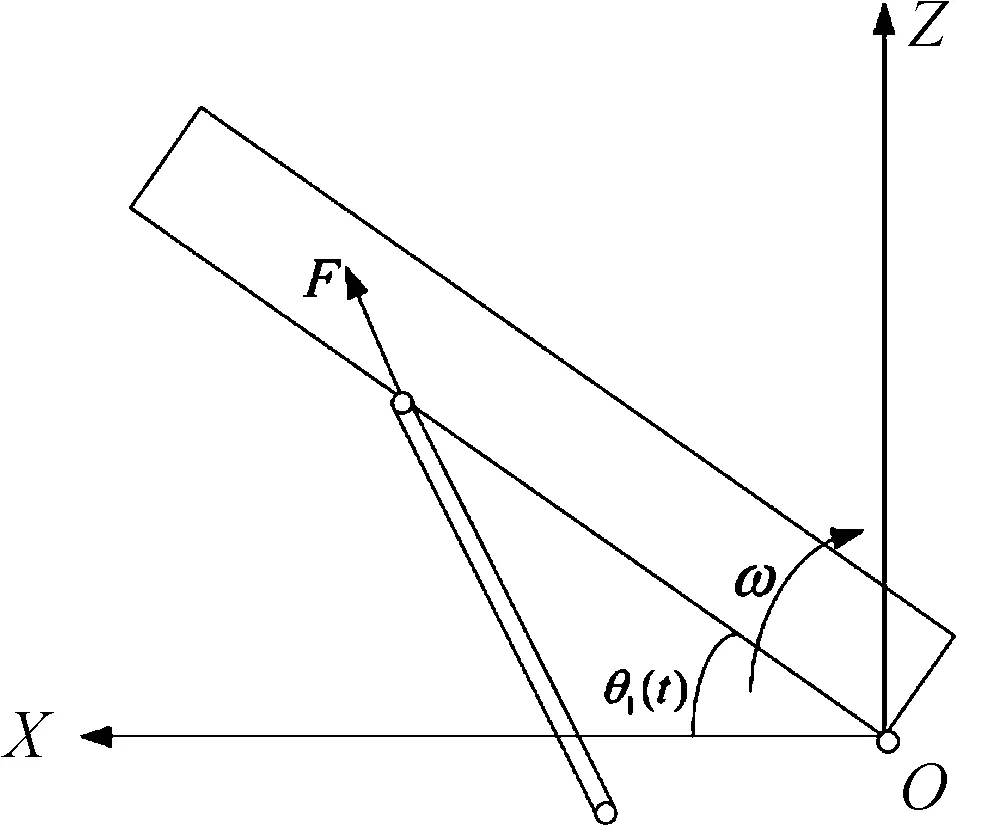
圖3 起豎裝置運動示意圖Fig.3 Sketch of the movement of the erection device
起豎過程為圖4所示的“勻加速-勻速-勻減速”的過程,0~t1時段勻加速推進且角加速度為ε1,t1~t2時段勻速推進,t2~t3時段勻減速推進且角加速度為ε2。起豎角度采用如下數學模型[11]:
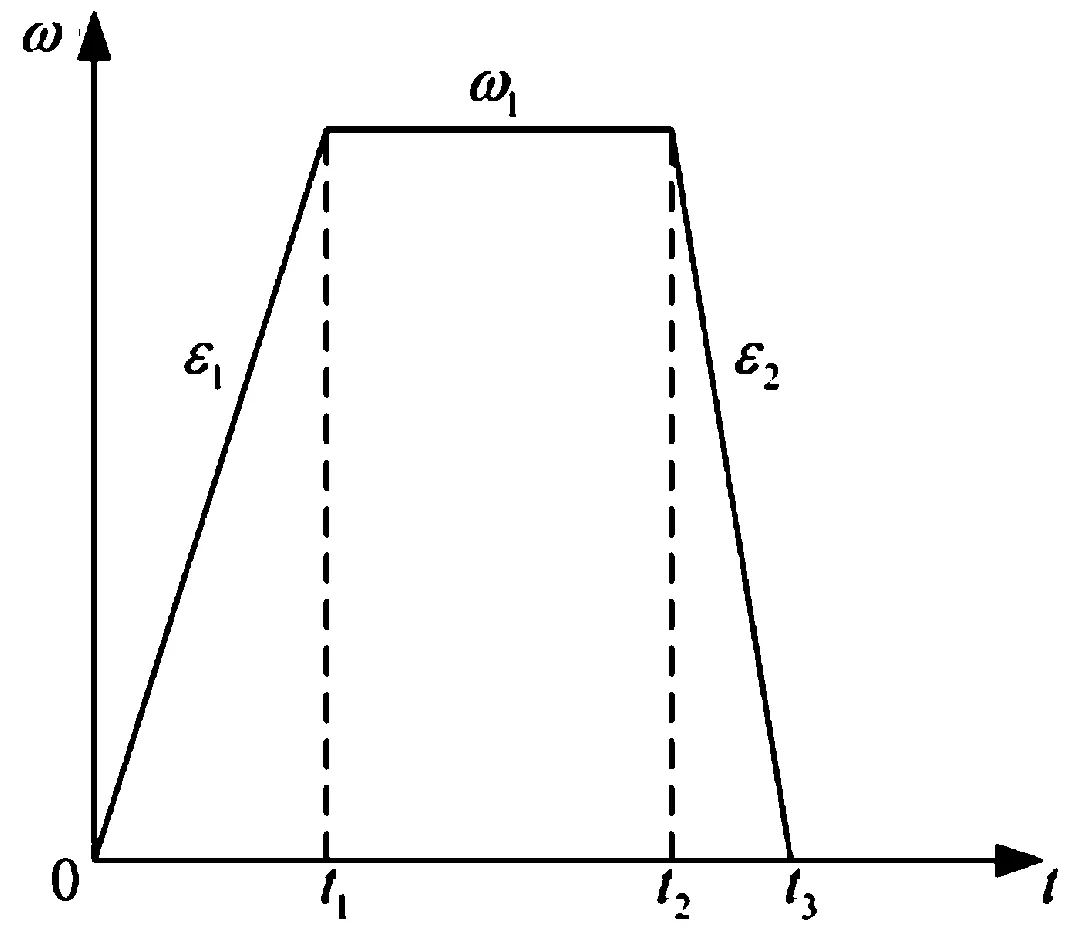
圖4 起豎角速度曲線Fig.4 Erecting process angular velocity curve
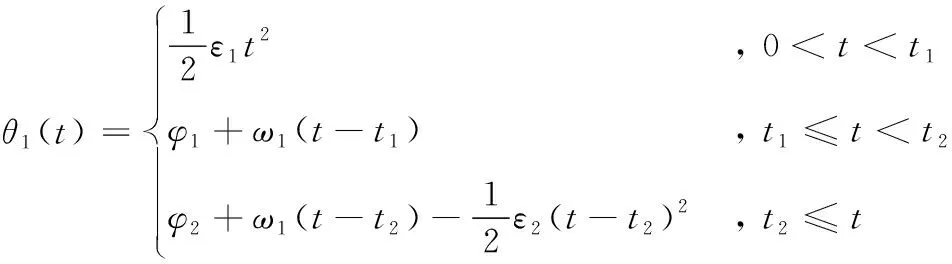
(1)
式中:ε1為0~t1時段角加速度;ε2為t2~t時段角加速度;φ1為t1時刻起豎角度;φ2為t2時刻起豎角度;ω1為t1時刻角速度;θ1(t)為t時刻的起豎角度值。
根據實際需求,車輛起豎過程總用時為50 s;在起豎角度到達25°之前勻加速推進且角加速度為ε1,中間段以ω1勻速推進,到達90°前勻減速推進且加速度為2ε1。
由上述條件對式(1)進行求解,可得出:
t1=1 000/51 s≈19.608 s
t2=2 050/51 s≈40.196 s
ε1=2 601/20 000(°)/s2=0.130 05(°)/s2
ω1=51/20 (°)/s=2.55 (°)/s
由求解結果,起豎角度與時間的關系如圖5所示。
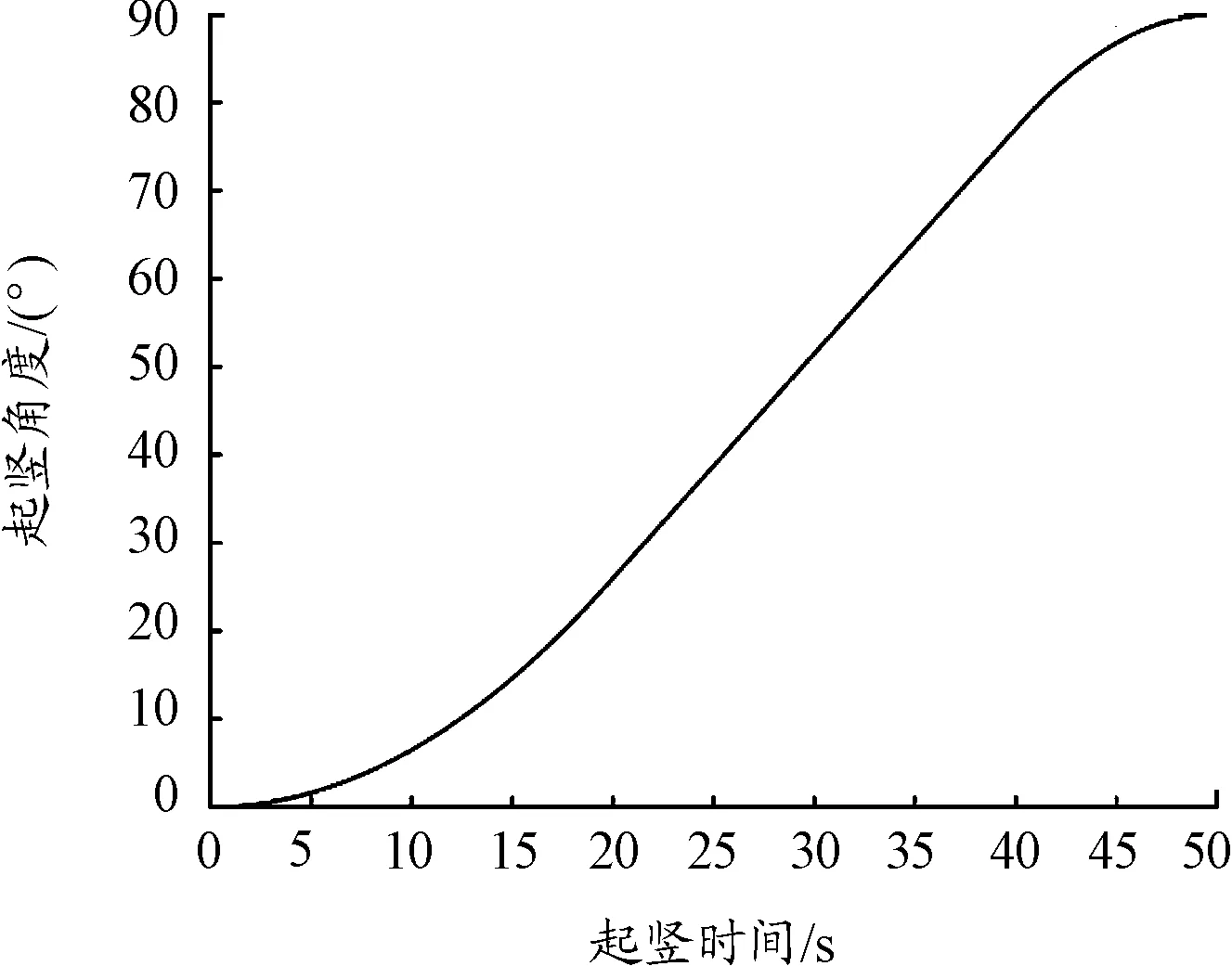
圖5 起豎角度與時間關系曲線Fig.5 Relationship between erection angle and time
2.3 調平與起豎過程規劃
為縮短特種車輛的展開時間,采用在車輛進行調平的同時,負載開始起豎的并行工作方案。同時為保證調平的精度與并行工作時車輛的穩定性,在調平過程進入第二階段時再進行起豎的。
對調平過程與起豎過程采用如下并行工作規劃:0~20 s,調平階段;0~8 s,調平第一階段;8~20 s,調平進入第二階段的同時開始起豎;第20 s,調平第二階段結束;第58 s,起豎完成。具體過程如表1所示。
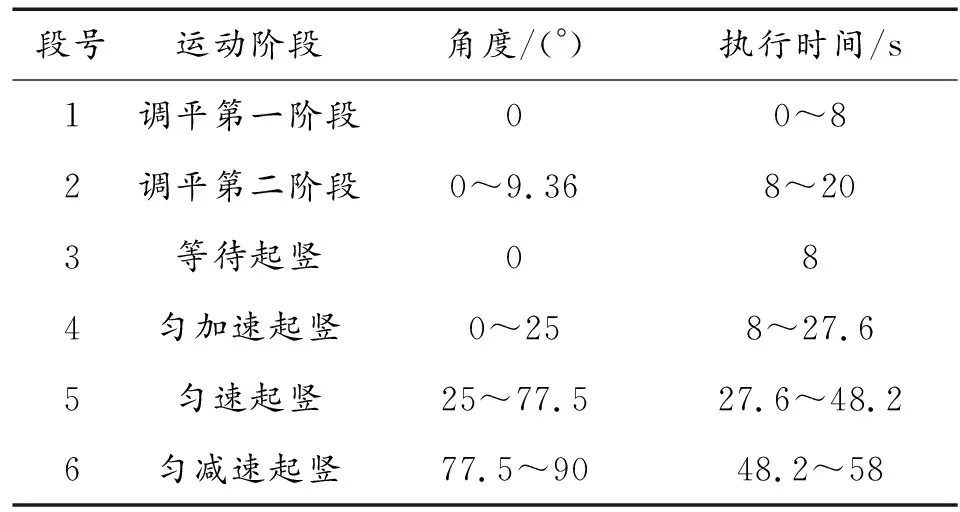
表1 調平與起豎運動規劃
3 特種車輛受力分析
3.1 特種車輛主要參數
某型特種車輛起豎機構如圖6所示,具體參數如下:負載長度L0=14 m;旋轉支點O到起豎油缸下支點O2的水平距離為L1=7.500 m;旋轉支點O到起豎油缸下支點O2的豎直距離為L2=1.080 m;旋轉支點O到起豎油缸上支點O1沿負載方向的距離為L3=10.100 m;負載質心O3沿垂直于負載方向距旋轉支點O的距離為L4=1.500 m;負載質心O3沿負載方向距旋轉支點O的距離為L5=5.500 m;負載質量m=60 000 kg。
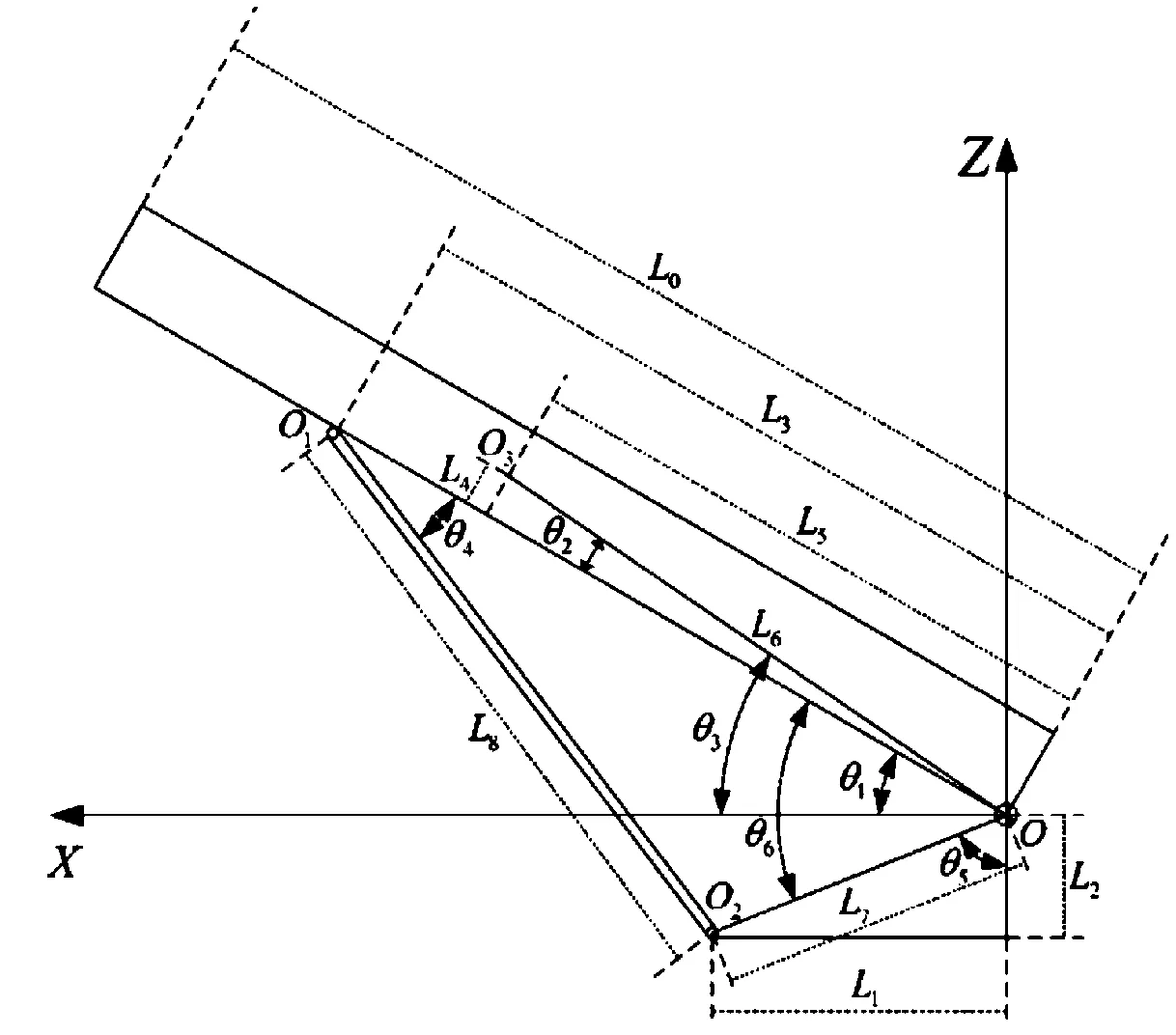
圖6 起豎機構尺寸示意圖Fig.6 Schematic diagram of the size of the erection mechanism
某型特種車輛車體如圖7所示,具體參數如下:前后調平支腿的距離L9=13 m;左右調平支腿的距離L10=3.5 m;車體重心O4距后側支腿距離L11=9 m;進入調平第二階段,調平支腿長度s=1.3~1.5 m;車體質量m1=22 000 kg;重力加速度取g=9.8 m/s2。
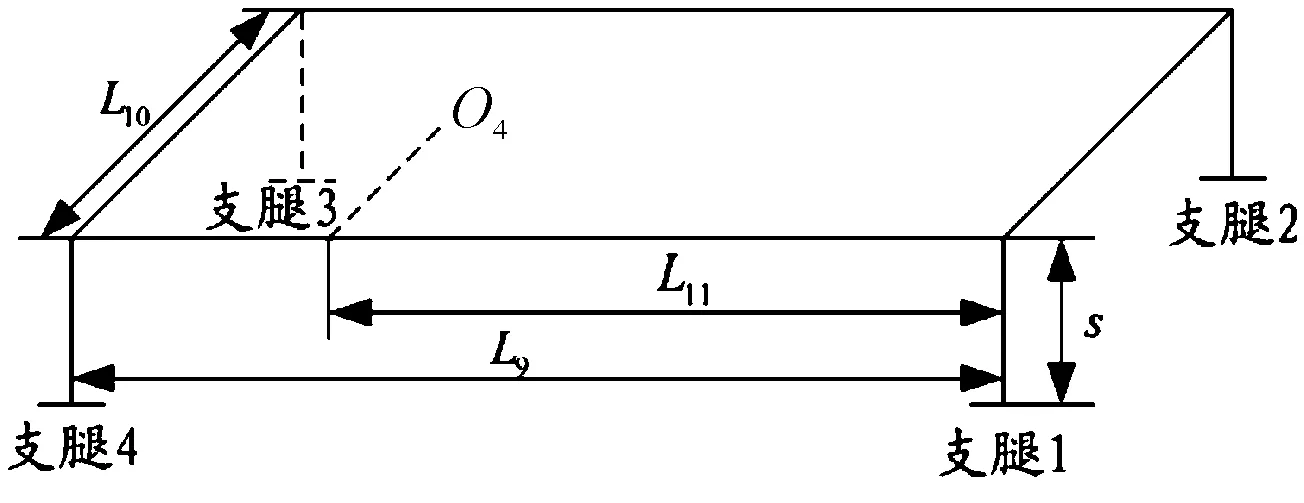
圖7 車體尺寸示意圖Fig.7 Schematic drawing of the car body size
3.2 調平支腿受力分析
在調平第二階段,因后支腿受力大于前支腿,所以需重點校核并行工作時后側支腿的受力情況。車體受力情況如圖8所示。
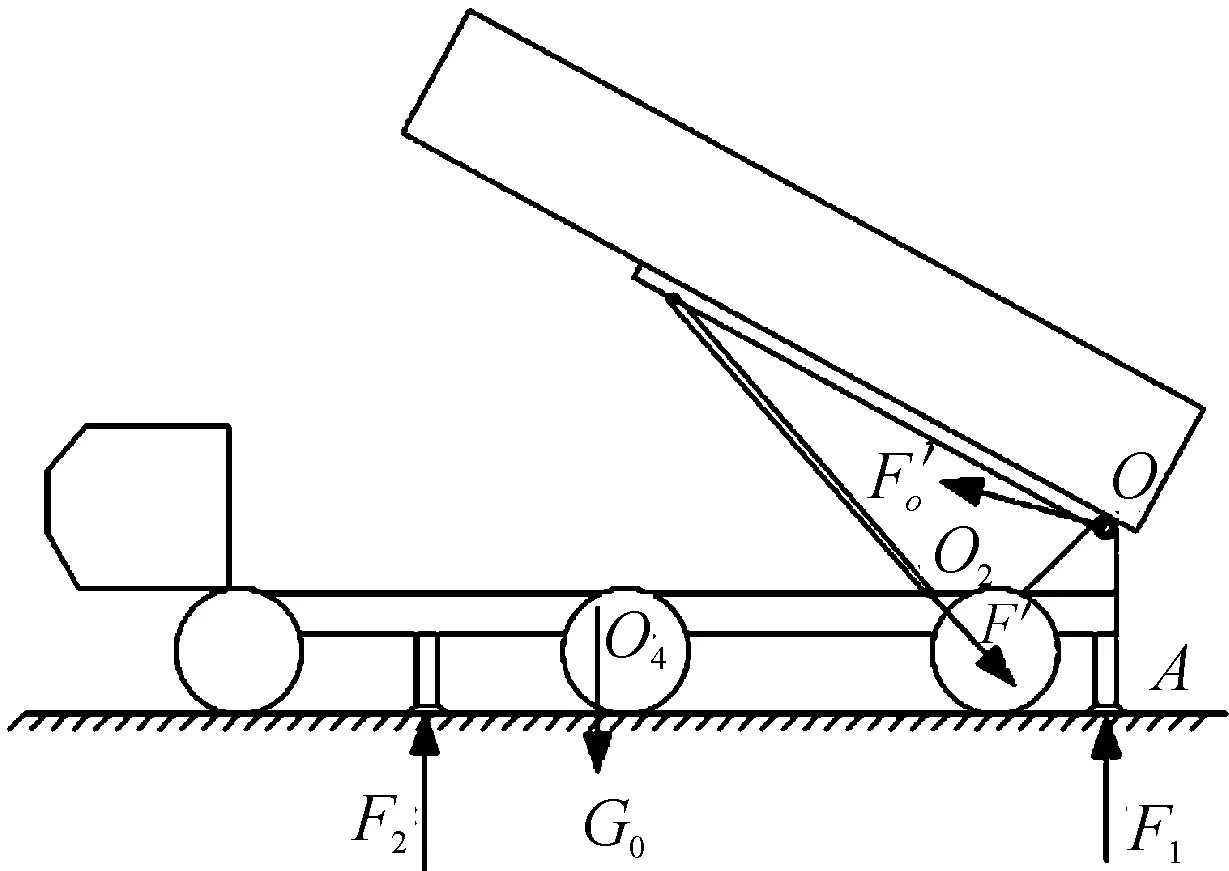
圖8 車體受力示意圖Fig.8 Schematic diagram of vehicle body force
圖8中,F1為A點在豎直方向上的分力,F′為起豎力F在車體上的反作用力,Fo′為負載在O點上受到的反作用力,G0為車體自身質量。
當車體為靜止狀態時,后側支腿受到負載與車體的重力所產生的重力矩,約束反力力矩為0,對圖8中的A點建立力矩平衡方程,有[12]:
∑MA=0, ∑Fy總=0
由上式可以得出:
(2)
當施加起豎力為F時,起豎力在A點豎直方向分力應為:
(3)
式中,起豎力F為突加載荷,由材料力學可知,其動載荷系數Kd1=2。
又因為支腿在調平第二階段為勻減速伸出,所以支腿受力F1也為動載荷,其動載荷系數為[13]:
式中,加速度a由調平第二階段時間與行程求出,調平第二階段用時12 s,調平支腿行程為0.2 m,可以求出:
a=1/360 m/s2
所以在并行工作中后側支腿受力為:
F后=Kd1Fy+Kd2F1
(4)
調平結束后的起豎過程中后側支腿受力為:
F后=Kd1Fy+F1
(5)
3.3 起豎油缸受力
取負載作為研究對象,由三力平衡匯交定理,其受力情況如圖9所示。
圖9中,F為起豎力,Fo為負載在O點上受力,G為負載質量。
當車體為靜止狀態時,對圖9中的O點建立力矩平衡方程,作用于O點的主動力矩為負載的重力矩與起豎油缸的推力矩,約束反力力矩為0,有∑MO=0。再由圖6中起豎結構的幾何關系,則有以下方程[14]:
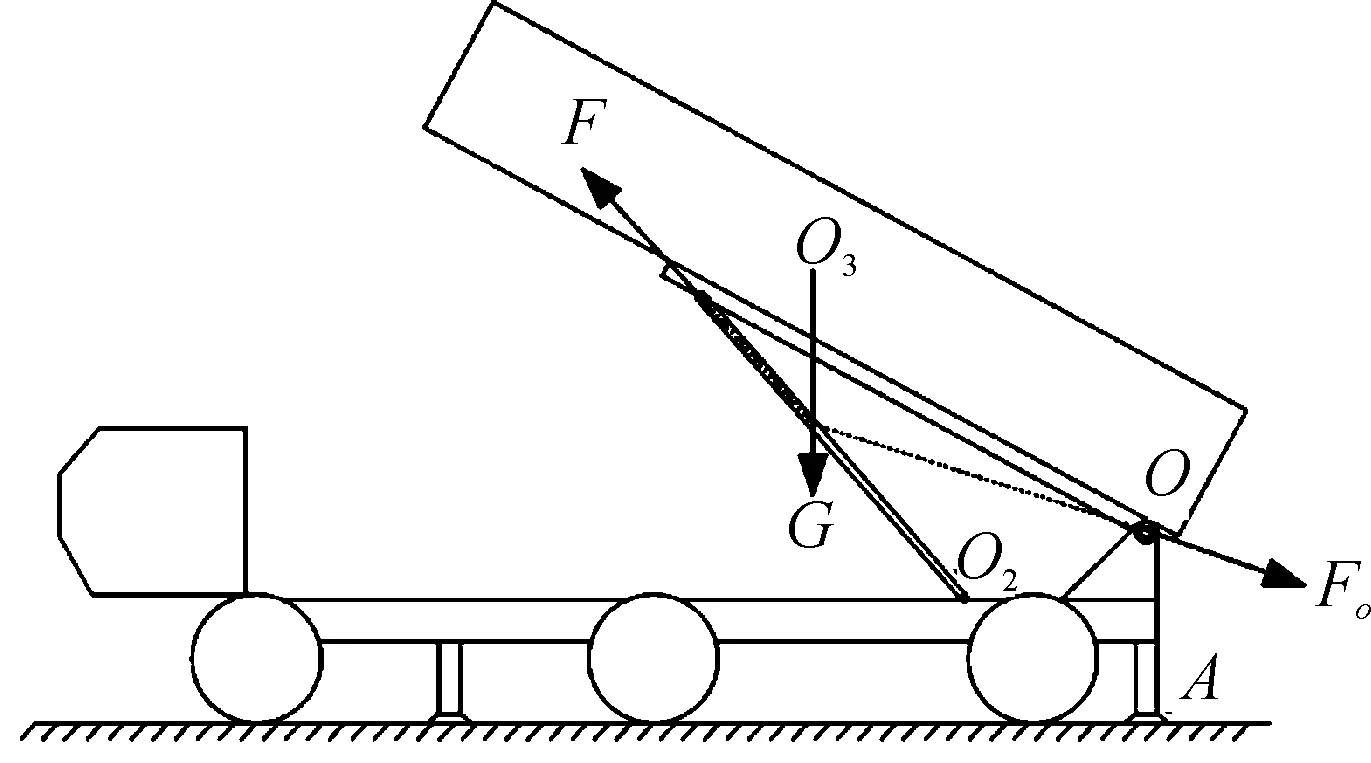
圖9 起豎油缸受力示意圖Fig.9 Schematic diagram of the force of the vertical oil cylinder
(6)
(7)
(8)
(9)
θ3=θ1+θ2
(10)
(11)
(12)
(13)
(14)
在調平第二階段,該階段起豎力為動載荷。根據材料力學,動載荷系數也為Kd2。所以在調平第二階段,起豎力應為:
(15)
4 調平起豎并行工作仿真分析
4.1 仿真結果
根據前文對調平與起豎過程的規劃,采取調平過程進入第二階段再進行起豎的并行工作方案,該方案與串行工作方案主要在調平第二階段存在差異,因此,本文主要分析比較在此階段2種方案受力的差異。
利用Matlab求解方程式(2) ~方程式(15),結果如圖10~圖11與表2~表3所示。圖10與圖11中紅色曲線1是采用并行工作方案的后側支腿受力情況,綠色曲線2是采用串行工作方案的后側支腿受力情況。表2與表3中列出了兩種不同運動方案下后側調平支腿受力與起豎力的最大值和最小值。
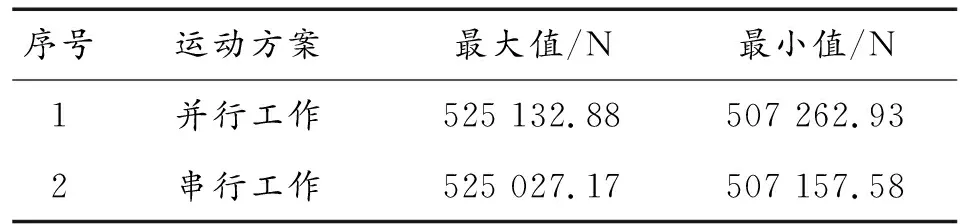
表2 2種運動方案下后側調平支腿受力Table 2 Forces on the rear leveling legs under the two exercise programs
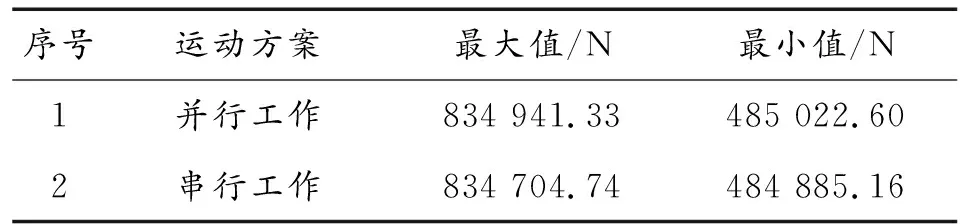
表3 兩種運動方案下起豎力
從圖10與圖11可以看出,在調平第二階段即并行工作階段,后側支腿受力與起豎力均比串行工作時大,因此需要分析并行工作過程中沖擊載荷對調平支腿與起豎油缸的影響。
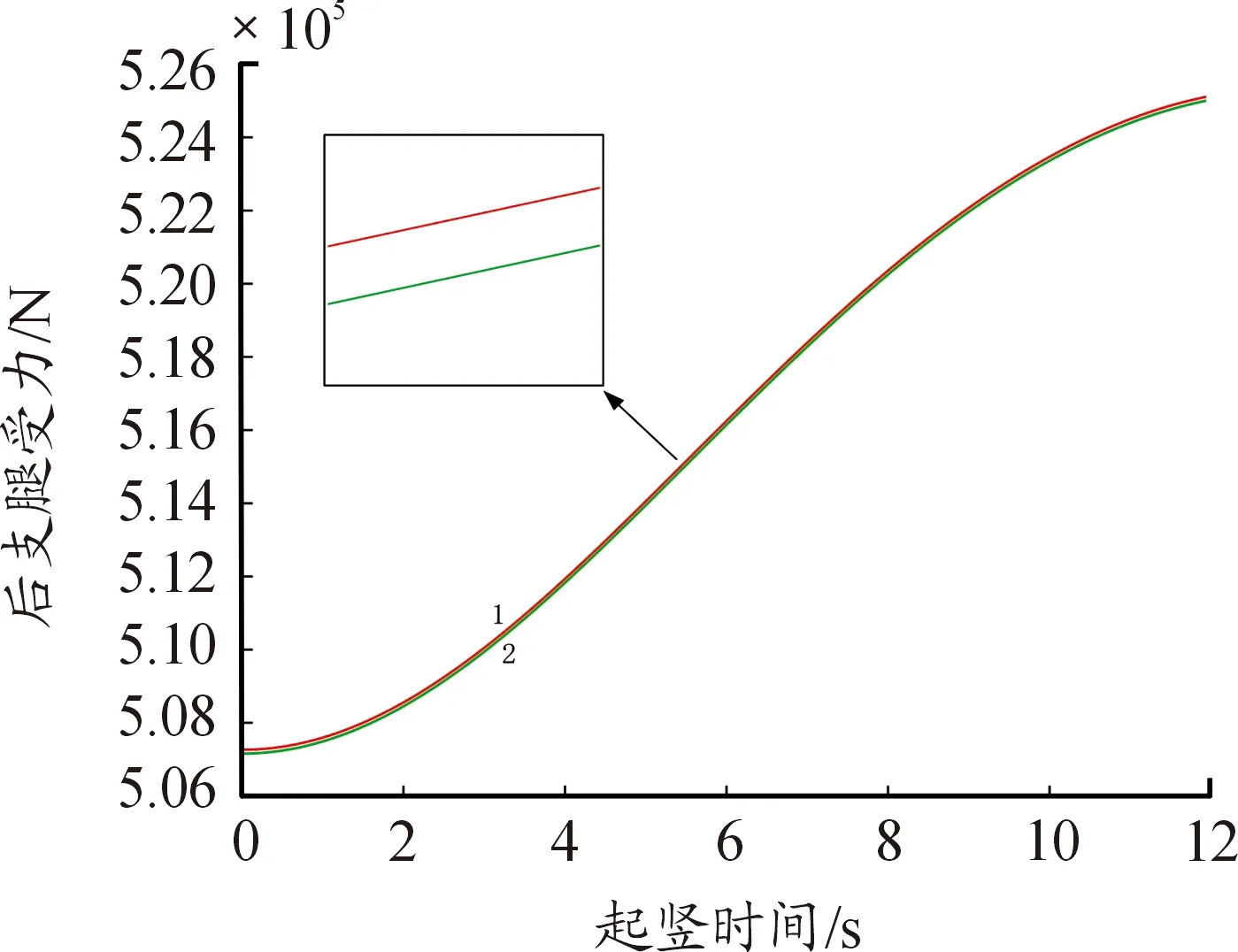
圖10 后側支腿受力與起豎時間之關系曲線Fig.10 The relationship between the force of the rear outrigger and the erection time
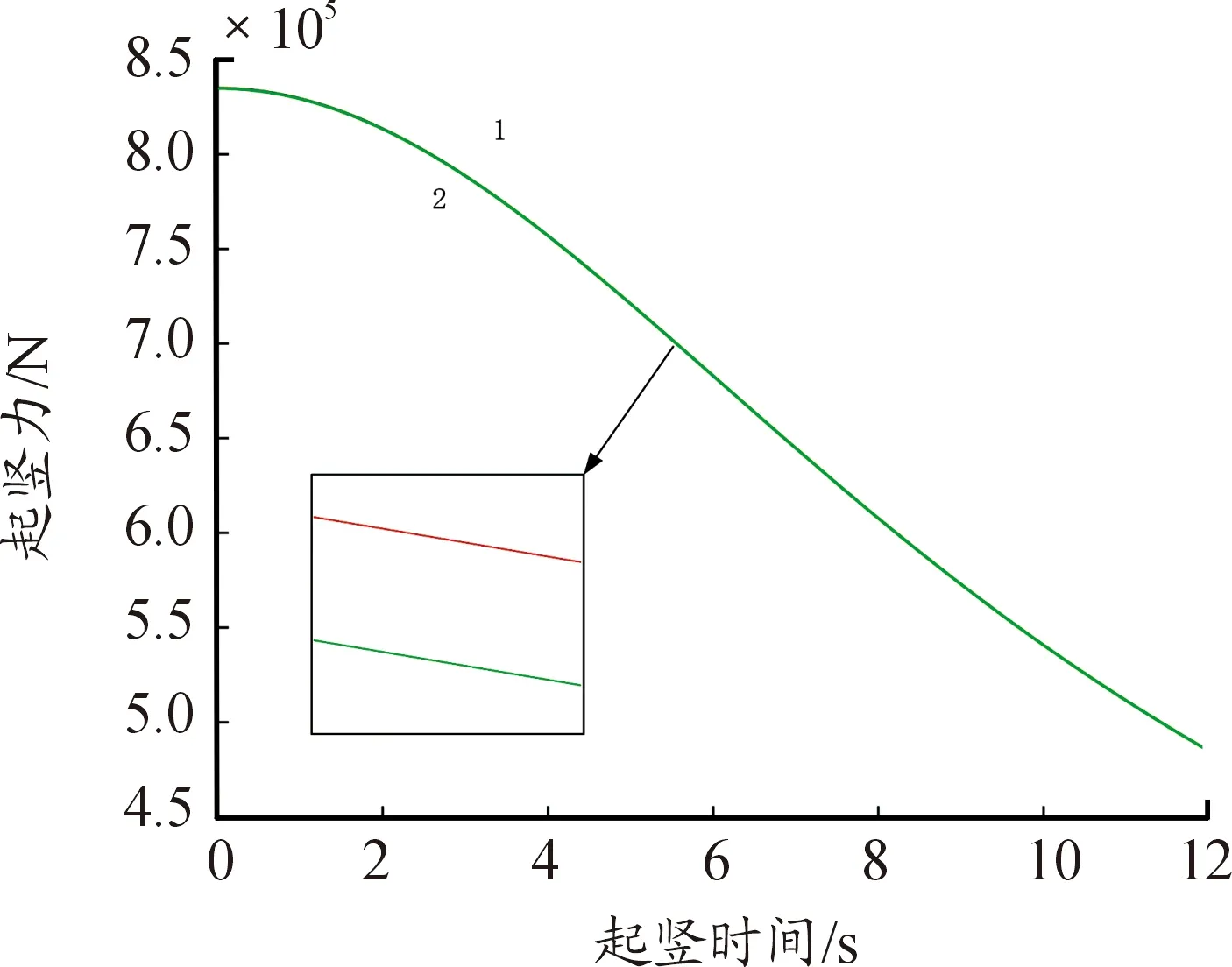
圖11 起豎力與起豎時間之關系曲線Fig.11 Relationship between erection force and erection time
4.2 并行工作對調平支腿的影響分析
從圖10中可以看出,后側調平支腿所受沖擊載荷隨著起豎時間增加而增加,2種運動方案下所受沖擊載荷在起豎時間為12 s、起豎角度為9.36°時達到最大,此時采用并行工作方案的沖擊載荷為 525 132.88 N;采用串行工作方案的沖擊載荷為 525 027.17 N。在Matlab中兩種運動方案所受沖擊載荷的差值,如圖12所示。
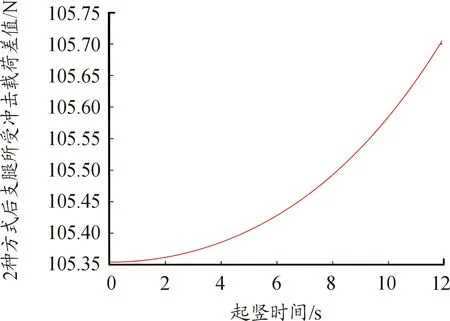
圖12 后側支腿所受沖擊載荷差值與起豎時間之關系曲線Fig.12 The relationship between the impact load difference on the rear leg and the erection time
從圖12中可以看出,2種運動方案下后側調平支腿所受沖擊載荷的差值也隨著起豎時間增加而增加,最大值為105.71 N。沖擊載荷增加幅度較小,對調平支腿的影響可以忽略。
4.3 并行工作對起豎油缸的影響分析
從圖11中可以看出,起豎力隨著起豎時間增加而減小,2種運動方案下所受沖擊載荷在起豎開始階段達到最大,此時采用并行工作方案的沖擊載荷為834 941.33 N;采用串行工作運動方案的沖擊載荷為834 704.74 N。在Matlab中計算2種運動方案所受沖擊載荷的差值,如圖13所示。
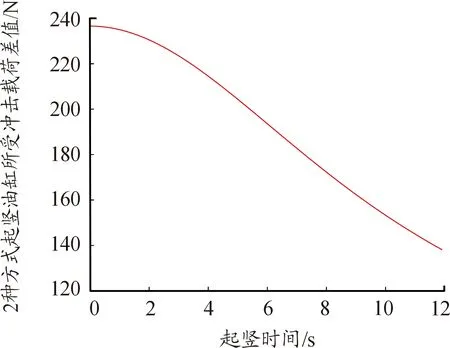
圖13 起豎力差值與起豎時間之關系曲線Fig.13 Relationship between erection force difference and erection time
從圖13中可以看出,起豎力的差值隨著起豎時間增加而減小,在起豎開始階段起豎力差值達到最大,為236.6 N。沖擊載荷增加幅度較小,對起豎油缸的影響也可以忽略。
4.4 并行工作對展開時間的影響分析
串行工作展開所需總時間為調平用時與起豎用時相加,總用時為70 s;并行工作方案展開所需總時間由表1知為58 s。所以在采用并行工作方案時,該型特種車輛的展開時間可大大縮短,展開總用時可減少12 s,降低17.14%。
5 結論
1) 在并行工作過程中,后側支腿與起豎油缸受到的力比串行工作方案大,但增加幅度較小,調平支腿受力增加0.2%,起豎力增加0.3%,滿足車輛穩定性要求。
2) 調平與起豎過程的并行工作比串行工作的總用時可減少17.14%。
3) 采用并行工作方案,調平支腿和起豎油缸受力增加不明顯的同時,有效減少了該型特種車輛的工作準備時間。
4) 在實際過程中還需要考慮調平誤差、車體變形、系統沖擊等多種因素對并行工作的影響,對此還有待進一步深入研究。