應(yīng)用多星的空間目標跟蹤定位算法
2021-10-15 01:37:00喬鵬呂曉寧趙軍鎖夏玉立李濟民周瑤
航天器工程 2021年5期
喬鵬 呂曉寧 趙軍鎖 夏玉立 李濟民 周瑤
(中國科學(xué)院軟件研究所 天基綜合信息系統(tǒng)重點實驗室,北京 100190)
早期的衛(wèi)星任務(wù),衛(wèi)星數(shù)量較少,星載探測設(shè)備種類較為單一,常常采用單星對空間碎片等空間目標進行定位與跟蹤。單星定位算法僅具備被動測角信息時,只能通過激光測距的方式對空間目標進行定位,但激光測距機因測頻的限制,受空間距離及空間環(huán)境的影響,探測空間碎片等空間目標的定位與跟蹤誤差較大[1]。隨著探測領(lǐng)域的發(fā)展,與單星的空間目標探測能力相比,多星協(xié)同任務(wù)規(guī)劃可以合理分配任務(wù)資源,結(jié)合各類衛(wèi)星的在軌探測狀態(tài)與約束,具有較強的適應(yīng)性和較廣的觀測范圍,可完成復(fù)雜的觀測任務(wù)[2]。因此,基于衛(wèi)星搭建多星光學(xué)探測體系,解算空間碎片等空間目標的空間位置,實現(xiàn)空間目標的定位與跟蹤具有重要的研究意義。
近年來,基于衛(wèi)星解算空間碎片等空間目標方面,國內(nèi)外已開展多項研究。文獻[3]中研究了天基觀測空間碎片等空間目標的光譜特性,從而獲得空間目標的材料成分信息,為后續(xù)研究提供信息基礎(chǔ)。文獻[4]中分析了空間碎片探測譜段的響應(yīng)程度,采用多光譜光學(xué)載荷進行空間碎片的探測,為空間碎片定位提供數(shù)據(jù)基礎(chǔ)。文獻[5]中對天基觀測空間碎片等空間目標進行建模,分析系統(tǒng)誤差對探測精度的影響,并設(shè)計有效方法抑制觀測與模型結(jié)構(gòu)誤差對探測精度的影響。文獻[6]中首先分析了空間碎片成像特性,構(gòu)建二維高斯擬合模型,采用核函數(shù)的設(shè)計,監(jiān)測空間碎片。但是,采用單星激光測距的方式,成像軌跡受到距離與空間環(huán)境的影響,進而影響定位精度。現(xiàn)有空間碎片探測技術(shù)在空間坐標系中目標定位與航跡管理方面,其目標定位精度問題依舊面臨巨大挑戰(zhàn),同時光學(xué)探測體系還會出現(xiàn)空間目標的星間信息丟失、衛(wèi)星與目標共面場景。因此,本文面向多星探測領(lǐng)域,提出一種多星空間目標跟蹤定位算法。該算法基于三角交會原理[7],建立空間坐標轉(zhuǎn)換模型與多星定位模型,關(guān)聯(lián)空間目標像點,解算空間目標軌跡,跟蹤空間目標。當(dāng)產(chǎn)生空間目標信息丟失等異常情況時,引入加速度參數(shù)建模目標軌跡,改進卡爾曼濾波算法預(yù)測空間目標軌跡位置。
1 空間目標跟蹤定位算法
1.1 天基探測系統(tǒng)空間目標觀測模型
首先,構(gòu)建分布式天基探測系統(tǒng)總體架構(gòu),搭建天地基一體化、柔性可變的協(xié)同系統(tǒng),將多星分為中央控制衛(wèi)星、中間信息傳輸衛(wèi)星和底層執(zhí)行衛(wèi)星,如圖1所示。天基探測系統(tǒng)包括3個層級的衛(wèi)星和地面控制中心。①第1個層級為中央控制衛(wèi)星,該類衛(wèi)星具有較強的智能性,是協(xié)同觀測系統(tǒng)中的主導(dǎo)者,可完成協(xié)同任務(wù)規(guī)劃、智能決策等工作。②第2個層級為中間信息傳輸衛(wèi)星,該類衛(wèi)星只做數(shù)據(jù)中間通信,負責(zé)底層執(zhí)行衛(wèi)星與中央控制衛(wèi)星的通信。③第3個層級為底層執(zhí)行衛(wèi)星,該類衛(wèi)星可實現(xiàn)終端智能,包括空間目標發(fā)現(xiàn)、識別、跟蹤,以及小范圍任務(wù)規(guī)劃功能。④地面控制中心包括系統(tǒng)控制中心與指令跟蹤站,它與中央控制衛(wèi)星承擔(dān)著系統(tǒng)的最高智能決策和任務(wù)分配功能,是系統(tǒng)的核心組成部分。

圖1 天基探測系統(tǒng)架構(gòu)Fig.1 Architecture of a space-based exploration system
天基探測系統(tǒng)可合理分配衛(wèi)星資源,排列不同的時間窗,制定多星觀測空間目標的任務(wù)規(guī)劃,構(gòu)建多星觀測空間目標的交會模型,通過中央控制衛(wèi)星控制底層執(zhí)行衛(wèi)星進行空間目標的觀測定位。通過對多星坐標及空間目標坐標的三角交會原理,可以實現(xiàn)空間目標的位置解算。同時,各衛(wèi)星數(shù)據(jù)統(tǒng)一到同一坐標系下進行交會解算。天基探測系統(tǒng)對多空間目標跟蹤時,可獲得空間目標相對于當(dāng)前衛(wèi)星坐標下的方向數(shù)據(jù),方向數(shù)據(jù)與衛(wèi)星高精度位置姿態(tài)數(shù)據(jù)結(jié)合轉(zhuǎn)換到交會坐標系下。
天基探測系統(tǒng)采用異址雙星方式,中央控制衛(wèi)星確定系統(tǒng)觀測任務(wù)在統(tǒng)一時序控制下,各星對空間目標進行同步觀測,通過多星交會解算空間目標軌跡。以雙星異面交會算法在相機自身坐標系下為例,如圖2所示。圖2中,設(shè)坐標系為O-XYZ,光學(xué)衛(wèi)星1位置O1坐標為[X01Y01Z01],空間目標(位置T)相對于光學(xué)衛(wèi)星1的方位角與俯仰角為A1,E1,并且構(gòu)成一條空間射線O1T1;光學(xué)衛(wèi)星2位置O2坐標為[X02Y02Z02],空間目標(位置T)相對于光學(xué)衛(wèi)星2的方位角和俯仰角分別為A2,E2,并且構(gòu)成另一條空間射線O2T2。因?qū)嶋H光學(xué)設(shè)備的觀測誤差,雙星與空間目標間的向量稱作異面直線[8]。天基探測系統(tǒng)下的底層執(zhí)行衛(wèi)星進行觀測空間目標任務(wù),空間目標成像投影與坐標系轉(zhuǎn)換統(tǒng)一為J2000坐標系。空間目標(位置T)相對于光學(xué)衛(wèi)星1和2的方位、俯仰角需要進行坐標轉(zhuǎn)換,轉(zhuǎn)換步驟如下。



(4)地心軌道坐標系轉(zhuǎn)至J2000坐標系。將軌道面旋轉(zhuǎn)至與赤道面重合,需要進行3次坐標旋轉(zhuǎn),通過軌道六根數(shù)可以得到軌道傾角γ、升交點赤經(jīng)Ω和升交點角距u,則空間目標(位置T)在J2000坐標系下的坐標可表示為[xECIyECIzECI]T=H-1[xpypzp]T。其中:H=RZ(u)RX(γ)RY(Ω)。
利用J2000坐標系下的空間目標(位置T)相對于光學(xué)衛(wèi)星1和2的坐標[xECI1yECI1zECI1]和[xECI2yECI2zECI2],可由式(1)解算出空間目標(位置T)相對于光學(xué)衛(wèi)星1和2的方位角A1、俯仰角E1與方位角A2、俯仰角E2。
(1)
設(shè)圖2中異面直線O1T1和O2T2的公垂線為l12,T1和T2分別為2條異面直線與其公垂線的交點,坐標分別為[X1Y1Z1]和[X2Y2Z2]。理論上,空間目標在異面直線O1T1和O2T2的公垂線上,確定衛(wèi)星間空間目標像點關(guān)聯(lián)關(guān)系,可交會確定空間目標的坐標。

圖2 雙星交會算法原理Fig.2 Schematic diagram of double-satellite intersection algorithm
1.2 衛(wèi)星間空間目標像點關(guān)聯(lián)
坐標系轉(zhuǎn)換后,天基探測系統(tǒng)的底層執(zhí)行衛(wèi)星之間需要計算不同像點之間的異面直線距離,關(guān)聯(lián)同一空間目標的星間像點。利用第1.1節(jié)像面坐標轉(zhuǎn)至J2000坐標下的步驟,假設(shè)像點i相對于光學(xué)衛(wèi)星1的空間坐標為[X1iY1iZ1i],像點j相對于光學(xué)衛(wèi)星2的空間坐標為[X2jY2jZ2j],光學(xué)衛(wèi)星1的坐標為[x1y1z1],光學(xué)衛(wèi)星2的坐標為[x2y2z2]。具體求解的數(shù)學(xué)表達式為
(2)
式中:[dij]為2顆衛(wèi)星間不同像點之間的異面直線距離矩陣。
計算出像點間的異面直線距離矩陣,當(dāng)作最優(yōu)化問題的匹配成本矩陣,這樣可通過最優(yōu)化算法,最小化總匹配成本,找到同一空間目標在不同衛(wèi)星所成像點的對應(yīng)關(guān)系,以及同一空間目標在不同時刻所成像的對應(yīng)關(guān)系。本文采用最近鄰點算法[9]將星間像點最優(yōu)匹配問題建模為賦權(quán)二分圖求最優(yōu)解的問題,原理為:若任意一個相等的子圖距離最近,可作為子圖的完美匹配,即匹配成本最小的一組匹配結(jié)果,得出已經(jīng)完成匹配的空間目標標志號,以及匹配失敗的星間的空間目標標志號。
1.3 空間目標的跟蹤與定位
最優(yōu)化求解出星間像點匹配關(guān)系,基于雙星交會模型解算空間目標軌跡及誤差計算公式[10],分析影響定位精度的因素。
(3)
式中:m1,m2,K,l1,l2分別為光學(xué)衛(wèi)星1和2交會模型的中間變量。
(4)
式中:加權(quán)系數(shù)ρ∈[0,1];[xyz]為空間目標坐標。
這樣,求解出空間目標的坐標,便可對其進行跟蹤定位。
1.4 異常情況下的空間目標跟蹤
天基探測系統(tǒng)在軌觀測運行時,若空間目標觀測過程中出現(xiàn)星間信息丟失、空間目標與衛(wèi)星共面情況,多星定位算法對空間目標的坐標預(yù)測誤差較大,跟蹤精度較低。
天基探測系統(tǒng)觀測空間目標出現(xiàn)異常情況時,通過中間信息傳輸衛(wèi)星將異常行為指令反饋給中央控制衛(wèi)星,中央控制衛(wèi)星發(fā)出算法處理指令,底層執(zhí)行衛(wèi)星執(zhí)行加入加速度分量的卡爾曼濾波算法[11],預(yù)測空間目標在當(dāng)前幀的軌跡位置,進而完成空間目標跟蹤任務(wù)。
傳統(tǒng)卡爾曼濾波算法[11]的目標軌跡建模如下。
(5)
(6)
卡爾曼濾波算法首先采用時間更新方程來預(yù)估空間目標的坐標位置,時間更新方程為
X(k|k-1)=AX(k-1|k-1)+BU(k)
(7)
P(k|k-1)=AP(k-1|k-1)AT+Q
(8)
式中:X(k|k-1)為k時刻的過程狀態(tài);X(k-1|k-1)為k-1時刻的最優(yōu)狀態(tài);A為狀態(tài)轉(zhuǎn)移矩陣;B為系統(tǒng)參數(shù);U(k)為系統(tǒng)的調(diào)控量;P(k|k-1)與P(k-1|k-1)為k與k-1時刻狀態(tài)對應(yīng)的協(xié)方差;Q為高斯白噪聲。
時間更新方程以當(dāng)前狀態(tài)作為初始狀態(tài),基于空間目標軌跡向量預(yù)測下一幀的空間目標狀態(tài),即空間目標的坐標;預(yù)測完空間目標的位置,卡爾曼濾波算法采用狀態(tài)更新方程進行校正,狀態(tài)更新方程為
Kg(k)=P(k|k-1)HT/(HP(k|k-1)HT+R)
(9)
式中:Kg(k)為卡爾曼增益;H為觀測矩陣;R為測量噪聲對應(yīng)的協(xié)方差矩陣。
X(k|k)=X(k|k-1)+Kg(k)(Z(k)-
HX(k|k-1))
(10)
式中:Z(k)為k時刻的觀測值;X(k|k)為k時刻的最優(yōu)狀態(tài)。
P(k|k)=(I-Kg(k)H)P(k|k-1)
(11)
式中:I為單位矩陣;P(k|k)為X(k|k)狀態(tài)對應(yīng)的協(xié)方差。
采用狀態(tài)更新方程將時間更新方程預(yù)測的軌跡位置與監(jiān)測位置作差值,計算誤差協(xié)方差矩陣,迭代優(yōu)化,得到空間目標的坐標值,進而跟蹤空間目標。
2 實例驗證
2.1 測試用例
通過STK軟件構(gòu)建理論空間目標數(shù)據(jù)和觀測衛(wèi)星的數(shù)據(jù),模擬天基探測系統(tǒng)的衛(wèi)星組網(wǎng)情況,構(gòu)建4顆衛(wèi)星組網(wǎng)觀測16個目標從太原飛往非洲的場景,具體的場景示意如圖3所示。其中:M1~M16為空間目標,飛行高度為550 km,飛行時長約為660 s。衛(wèi)星對空間目標的可見時間段(日期2021-05-05,20幀每秒數(shù)據(jù))分布如表1所示,其中持續(xù)時間為總幀數(shù)除以每秒幀數(shù)計算得出。
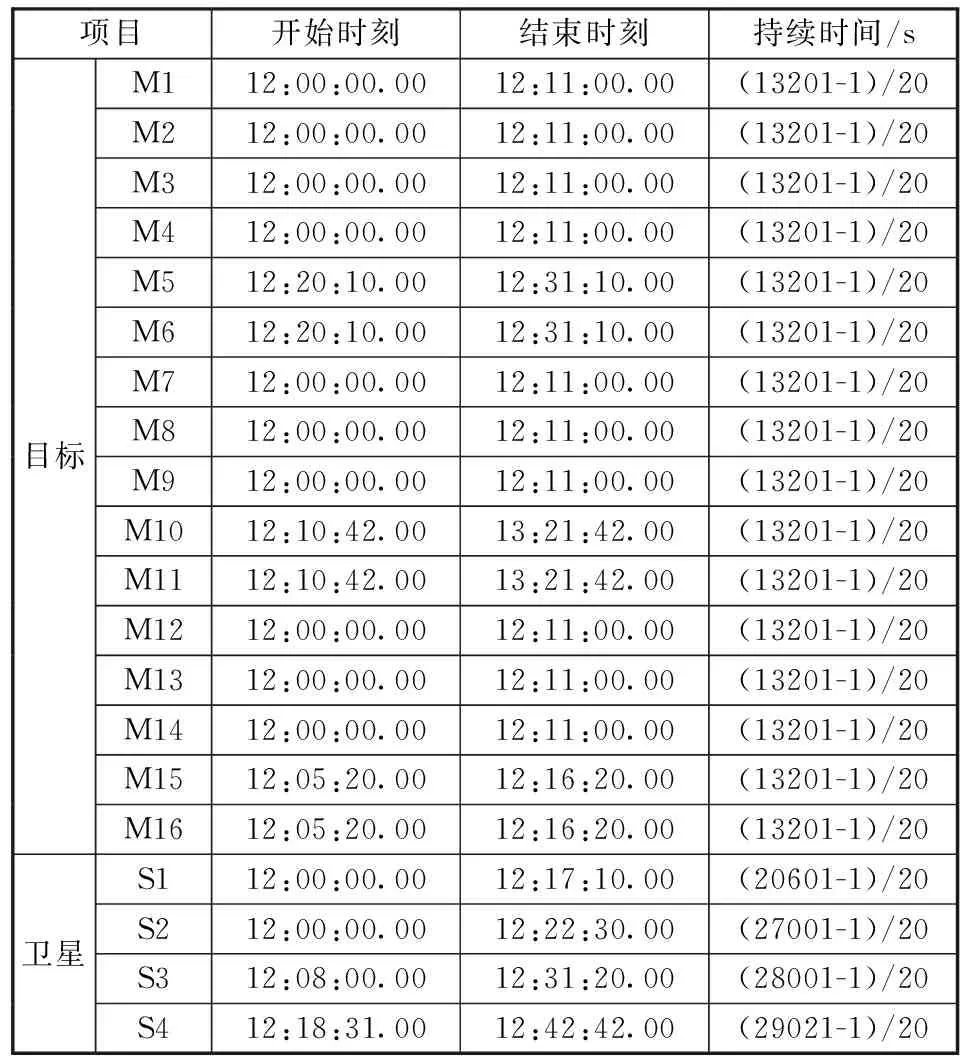
表1 衛(wèi)星對空間目標的可見時間段Table 1 Observable time periods of satellites to space targets
圖3 天基探測系統(tǒng)的衛(wèi)星組網(wǎng)仿真Fig.3 Satellite networking simulation of space-based exploration system
取衛(wèi)星編號S2與S3執(zhí)行雙星觀測空間目標定位任務(wù),測試用例見表2,共870 s的觀測數(shù)據(jù),進行空間目標的跟蹤與定位。

表2 測試用例Table 2 Test case
實際衛(wèi)星探測空間目標存在測量誤差,為模擬真實場景,本文附加的衛(wèi)星站點位置誤差為15 m,衛(wèi)星對空間目標的俯仰角與方位角誤差均為15″。
2.2 空間目標定位誤差分析
利用第2.1節(jié)的測試用例測試本文算法的可行性,測試空間目標定位算法的精度與跟蹤情況,如圖4所示。
由圖4可看出:X,Y,Z方向的位置誤差均在10 m以內(nèi),X方向的速度誤差在6 m/s以內(nèi),Y方向的速度誤差在8 m/s以內(nèi),Z方向的速度誤差在4 m/s以內(nèi)。在前面15 s,X,Y,Z方向位置與速度誤差稍高一些,分析衛(wèi)星間的空間目標關(guān)聯(lián)匹配需要一定的匹配時間,最近鄰算法匹配性能才能達到最優(yōu)。持續(xù)一段時間后,算法趨于穩(wěn)定狀況,位置誤差與速度誤差較低。
圖4 位置與速度誤差分析Fig.4 Position and velocity error analyses
下面統(tǒng)計本文算法對空間目標軌跡解算跟蹤的情況。成功跟蹤時,標志位置1;若未跟蹤,標志位置0。在870 s的觀測數(shù)據(jù)內(nèi),實時統(tǒng)計其空間目標跟蹤的準確率,具體如圖5所示。可以看出:采用本文算法,前15 s進行星間空間目標點的匹配關(guān)聯(lián),15 s之后進行空間目標跟蹤處理,當(dāng)天基探測系統(tǒng)底層執(zhí)行衛(wèi)星對空間目標的觀測數(shù)據(jù)一直存在時,采用本文的算法便能解算出空間目標軌跡,成功跟蹤空間目標。
圖5 本文算法的空間目標軌跡解算情況Fig.5 Space target trajectory solution of algorithm in this paper
2.3 異常情況下空間目標跟蹤分析
當(dāng)空間目標存在星間信息丟失、空間目標與衛(wèi)星共面時,基于仿真輸入的測試用例,將編號S3衛(wèi)星在12:12:00.00-12:12:20.00和12:16:00.00-12:16:20.00時間段內(nèi)對空間目標的觀測數(shù)據(jù)作丟失處理,采用本文算法的跟蹤狀態(tài)見圖6。
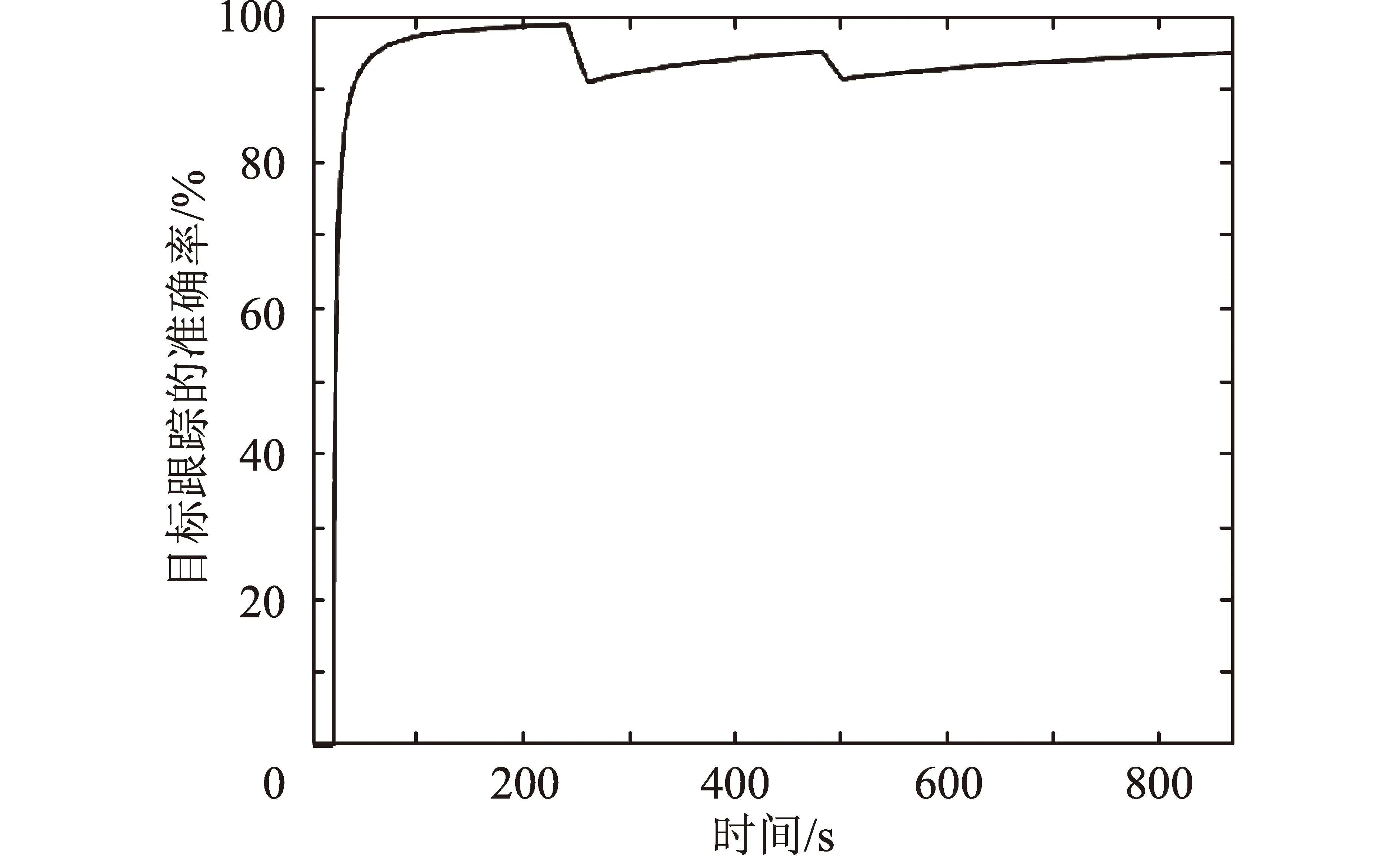
圖6 異常情況下空間目標跟蹤狀況Fig.6 Space target tracking status under abnormal conditions
底層執(zhí)行衛(wèi)星采用加入加速度分量的卡爾曼濾波算法預(yù)測空間目標在當(dāng)前幀的軌跡位置,采用本文算法的跟蹤狀態(tài)見圖7。可以看出:輔以前面幾幀空間目標的位置、速度、加速度建模目標軌跡向量,結(jié)合卡爾曼濾波算法能有效提高空間目標的跟蹤精度。

圖7 異常情況下卡爾曼濾波算法空間目標跟蹤狀況Fig.7 Space target tracking status of Kalman filter algorithm under abnormal conditions
3 結(jié)束語
本文構(gòu)建分布式天基探測系統(tǒng)總體架構(gòu),提出一種多目標跟蹤定位算法。該算法面向多星不同載荷平臺進行坐標轉(zhuǎn)換,計算觀測空間目標的異面直線距離,采用最近鄰算法最優(yōu)匹配同一空間目標在不同衛(wèi)星所成像點的對應(yīng)關(guān)系,進而解算空間目標軌跡與空間目標跟蹤;當(dāng)產(chǎn)生空間目標與衛(wèi)星共面等異常情況時,本文構(gòu)建目標軌跡向量引入加速度參數(shù),采用卡爾曼濾波算法預(yù)測空間目標軌跡位置。通過STK軟件仿真數(shù)據(jù)進行實例驗證,結(jié)果表明:該算法的定位精度更高,當(dāng)出現(xiàn)衛(wèi)星間的空間目標信息丟失的場景時,結(jié)合卡爾曼濾波算法能有效提高空間目標的跟蹤精度。
本文算法可應(yīng)用于天基觀測系統(tǒng),完成在軌實時處理,工程可實施性強,可為分布式天基探測系統(tǒng)在軌監(jiān)測空間碎片提供一種高效途徑;但該算法在雙星交會角處于180°周圍時存在測量條件劣化,導(dǎo)致探測空間目標軌跡時產(chǎn)生測量誤差,進而影響定位結(jié)果,下一步將重點研究該異常情況,構(gòu)建合理的誤差傳遞模型,提高算法對異常情況的普適性。