參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償關(guān)鍵技術(shù)的研究 *
2021-10-14 02:10:00張萬軍張萬良張景軒張景怡張景妍
制造技術(shù)與機(jī)床 2021年10期
張萬軍 張 峰 張萬良 張景軒 張景怡 張景妍
(①西安交通大學(xué)機(jī)械工程學(xué)院,陜西 西安 741049; ②甘肅澤德電子技術(shù)有限公司,甘肅 天水741003;③蘭州理工大學(xué)機(jī)電學(xué)院,甘肅 蘭州730050)
隨著裝備業(yè)、先進(jìn)制造業(yè)快速發(fā)展[1-8],需要大量的高精密、高精度的CNC機(jī)床進(jìn)行加工,針對許多CNC兩軸聯(lián)動(dòng)的機(jī)床是往復(fù)沿著一個(gè)軌跡運(yùn)動(dòng)完成CNC加工過程,存在各軸的進(jìn)給負(fù)載擾動(dòng)、機(jī)械系統(tǒng)延遲、輪廓誤差協(xié)調(diào)增益控制環(huán)的參數(shù)不匹配等問題,這樣就會生產(chǎn)輪廓誤差及跟隨誤差[9-10],研究CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)姆椒@得比較重要[11-12]。
近年來,有關(guān)交叉耦合輪廓控制方法(cross-coupled control, CCC)[13-20],主要涉及到迭代學(xué)習(xí)交叉耦合控制算法[14]、魯棒迭代學(xué)習(xí)控制算法、ZPETC[13]等算法等。張萬軍等人[12]主要是針對機(jī)械傳動(dòng)、電氣控制、多軸耦合增益匹配等問題,給出了一種了多軸聯(lián)動(dòng)的機(jī)床交叉耦合輪廓誤差補(bǔ)償技術(shù), 達(dá)到多軸聯(lián)動(dòng)的機(jī)床交叉耦合輪廓誤差補(bǔ)償?shù)哪康模岣逤NC的數(shù)控機(jī)床加工精度。文獻(xiàn)[16-21]針對變參數(shù)、不確定參數(shù)的非線交叉耦合系統(tǒng)應(yīng)用魯棒迭代學(xué)習(xí)控制的方法,通過誤差軌跡跟蹤,保證閉環(huán)系統(tǒng)有效,實(shí)現(xiàn)誤差軌跡跟蹤魯棒控制。
為了克服以上問題,本文給出了一種CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償,建立了CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償數(shù)學(xué)模型,只要p在給定的合理區(qū)間,調(diào)整p就可以達(dá)到CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償目的,使用MATLAB仿真。仿真結(jié)果表明:采用CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償,可以最大可能地消除了交叉耦合的輪廓,使得自調(diào)整交叉耦合的輪廓補(bǔ)償顯著性的提高,滿足高速、高精度的插補(bǔ)誤差補(bǔ)償,在參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償具有較強(qiáng)的借鑒意義。
1 輪廓誤差的定義
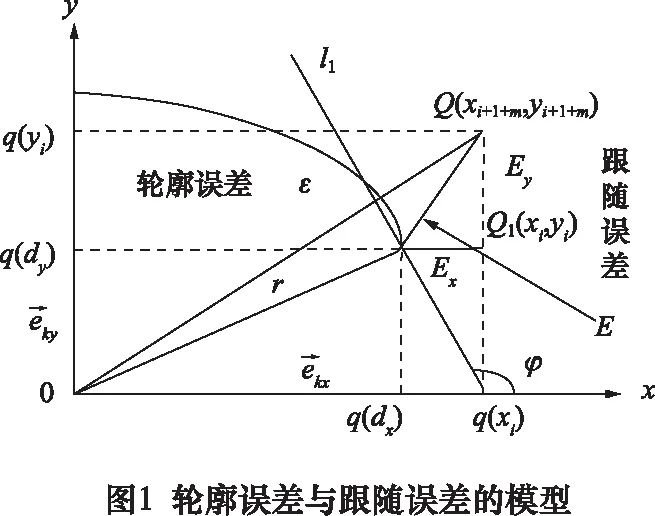
兩軸聯(lián)動(dòng)主要是下列方式輪廓誤差補(bǔ)償分析,如圖1所示。
由文獻(xiàn)[11]及圖1得:
(1)
(2)
利用Taylor級數(shù)展開:
(3)
忽略高階級數(shù)為:
(4)
令:
(5)
(6)
由下列計(jì)算式:
ε=[εx,εy]T≈[Cx,Cy][Ex,Ey]T
(7)
式(1)~(7)及圖1中:φ為l1與x軸的夾角;r為圓弧的曲率半徑;Cx、Cy為兩坐標(biāo)的軸輪廓誤差比例系數(shù);Ex、Ey為兩個(gè)坐標(biāo)的跟隨誤差分量,輪廓誤差為ε。Q1(xi,yi),Q(xi+1+m,yi+1+m)曲線的位置點(diǎn);εkx、εky分別表示x軸、y軸輪廓誤差分量;ekx、eky分別表示x軸、y軸跟隨誤差分量,輪廓誤差為ε,跟隨誤差為E。
2 參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償
2.1 參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)目刂品椒?/h3>
引入p作為參數(shù)自調(diào)整交叉耦合的控制參數(shù),具體參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)慕Y(jié)構(gòu)如圖2所示。
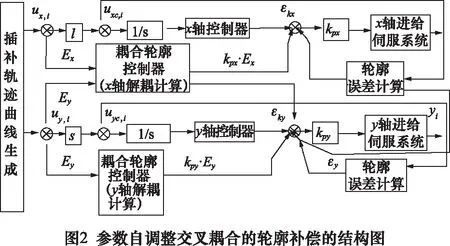
如圖2所示:ux,i、uy,i為兩個(gè)坐標(biāo)軸的交叉耦合速度;Ex、Ey為兩個(gè)坐標(biāo)軸的耦合誤差位置值;kpx、kpy為兩個(gè)坐標(biāo)軸的耦合傳遞函數(shù),即參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償。
鑒于高速、高精度CNC系統(tǒng)的插補(bǔ)及交叉耦合的實(shí)時(shí)性要求,交叉耦合的補(bǔ)償因子比例系數(shù)p采用比例控制方法,由文獻(xiàn)[4],得到兩軸的交叉耦合參數(shù):
(8)

交叉耦合輪廓補(bǔ)償Cx、Cy可以由下面式子計(jì)算得到:
(9)
式中:p為交叉耦合的補(bǔ)償因子比例系數(shù),為常數(shù)。
(10)
將式(10)代入式(7),得到輪廓誤差的公式:
ε=kpx(Ex+pErx)+kpy(Ey+pEry)
(11)
交叉耦合輪廓補(bǔ)償變增益參數(shù)p,若自調(diào)整交叉耦合的輪廓補(bǔ)償調(diào)整p值越小,交叉耦合值就越小;若自調(diào)整交叉耦合的輪廓補(bǔ)償調(diào)整p值越大,交叉耦合值就越大;若自調(diào)整交叉耦合的輪廓補(bǔ)償調(diào)整p值,在合理的范圍內(nèi)可以實(shí)現(xiàn)交叉耦合。
2.2 設(shè)計(jì)變增益交叉耦合增量C
由文獻(xiàn)[11]及圖2所得:得到兩軸的交叉耦合參數(shù)。
耦合輪廓補(bǔ)償控制關(guān)系式為
(12)
(13)
在式(12)、(13)中:upx和upy是位置環(huán)控制器的單獨(dú)跟蹤控制力,uc,i是輪廓控制力,ux,i和uy,i是每個(gè)軸的輪廓控制力分布。
將式(9)代入式(12)、(13)中,得到式(14)、(15):
(14)
(15)
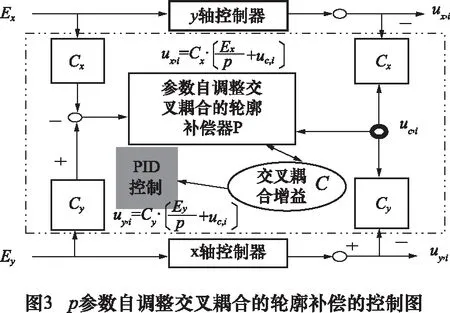
p參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)目刂茍D,如圖3所示。
由式(14)、(15),得到跟隨誤差的計(jì)算公式:
(14)
(15)
變增益交叉耦合C采用PID控制,可以完成交叉耦合。
式(4)~(11)及式(14)、(15)可知,當(dāng)p在給定的合理區(qū)間,uc,i處于一定的值,即可實(shí)現(xiàn)p參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)目刂啤?/p>
由式子(7)可知,輪廓誤差ε與跟隨誤差E成正比,一般討論輪廓誤差ε。
3 仿真實(shí)驗(yàn)與結(jié)果分析
在自己搭建的CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)膶?shí)驗(yàn)平臺,如圖4所示,進(jìn)行參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償。
3.1 參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)膶?shí)物試驗(yàn)
(1)橢圓實(shí)例1
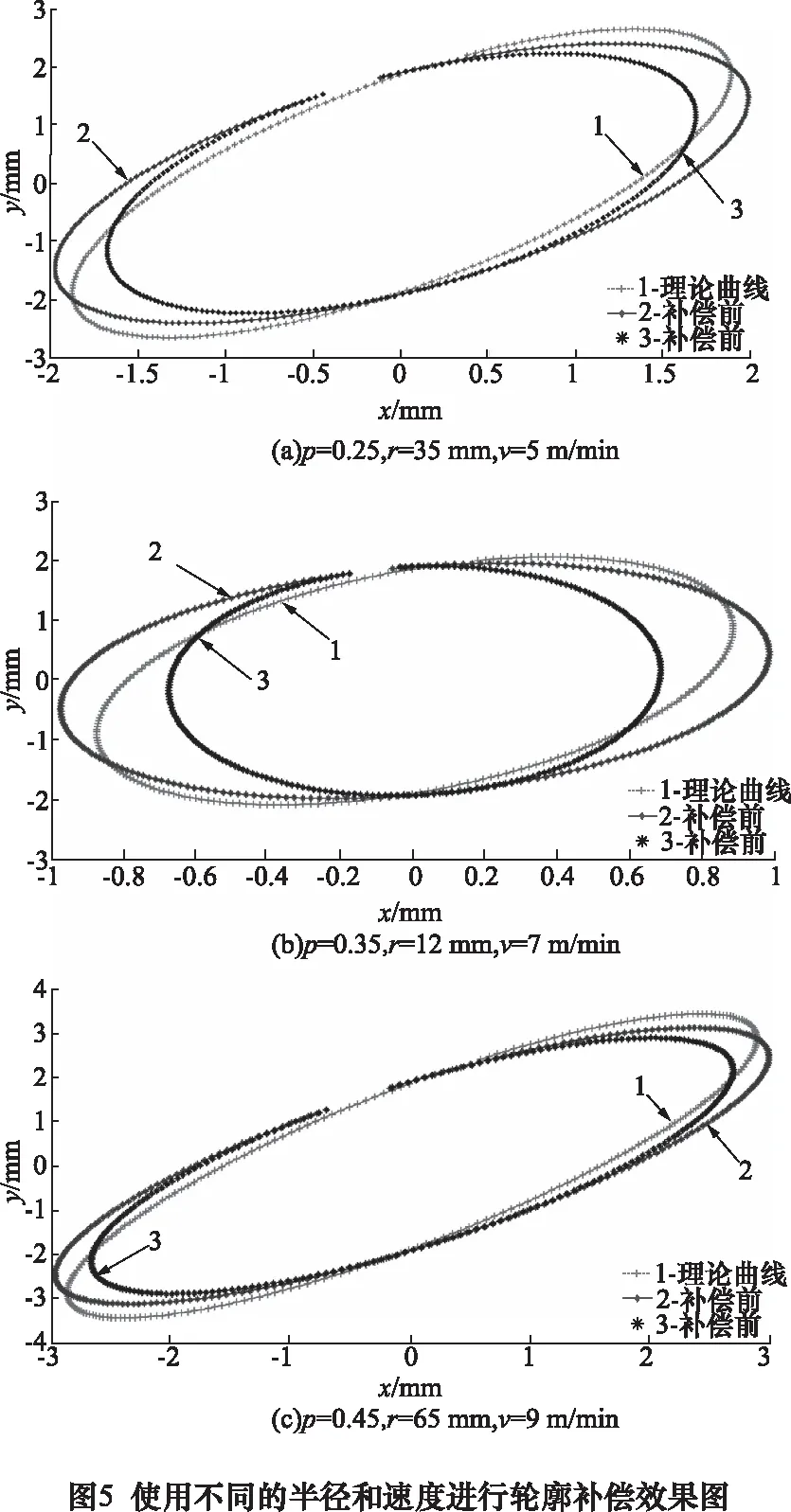
在開放式的CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)膶?shí)驗(yàn)平臺,使用不同的半徑和速度,進(jìn)行橢圓的參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償實(shí)驗(yàn),如圖5所示。
由圖5可知,使用不同的半徑和速度可以進(jìn)行橢圓的參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償,提高了橢圓輪廓誤差補(bǔ)償,消除CNC機(jī)床加工橢圓而產(chǎn)生顫動(dòng)及估計(jì)誤差。
(2)螺旋旋轉(zhuǎn)體的實(shí)例2
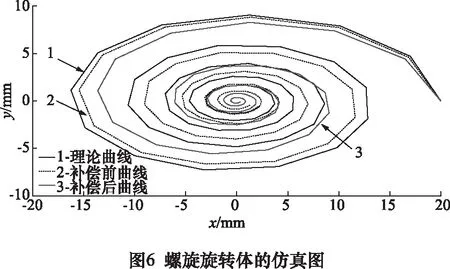
本文的算法在自己搭建的CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)膶?shí)驗(yàn)平臺進(jìn)行螺旋旋轉(zhuǎn)體的仿真試驗(yàn),v=5 m/min,如圖6所示。
由圖6可知,理論曲線、補(bǔ)償前曲線與補(bǔ)償后曲線基本上相一致,驗(yàn)證該算法的正確性與合理性。
(3)一般曲線的實(shí)例3
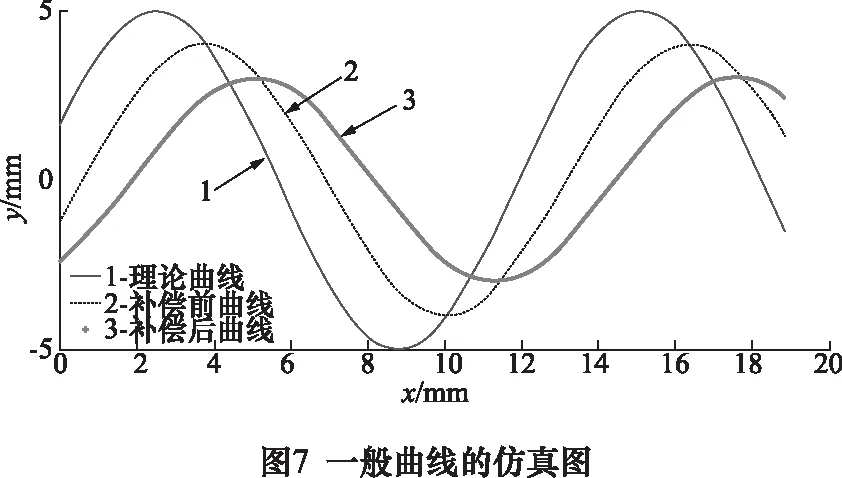
本文的算法在自己搭建的CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)膶?shí)驗(yàn)平臺進(jìn)行余弦曲線y=5×cos(x-2/5×π) 的仿真試驗(yàn),v=5 m/min,如圖7所示。
由圖7可知,理論曲線、補(bǔ)償前曲線與補(bǔ)償后曲線基本上相一致,驗(yàn)證該算法的正確性與合理性。
3.2 交叉耦合的輪廓補(bǔ)償MATLAB仿真分析
3.2.1直徑方向與實(shí)際速度方向輪廓誤差
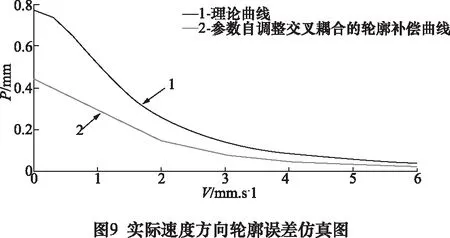
根據(jù)本文建立的自調(diào)整交叉耦合的輪廓補(bǔ)償誤差模型,當(dāng)p∈[0,1]時(shí),做出直徑方向交叉耦合的輪廓補(bǔ)償誤差仿真圖,實(shí)際速度方向輪廓誤差仿真圖;對直徑方向與實(shí)際速度方向輪廓誤差利用MATLAB軟件進(jìn)行仿真分析,如圖7、8所示。
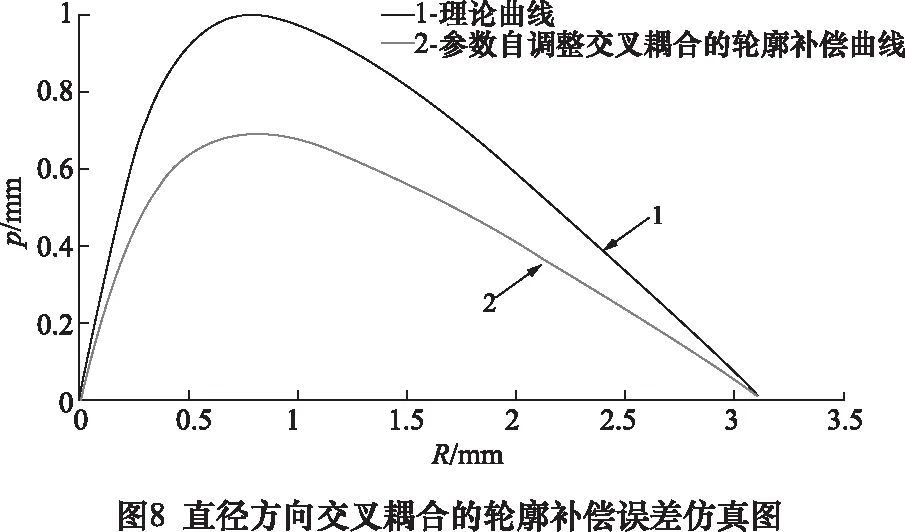
由圖7可知,當(dāng)p在給定的合理區(qū)間,半徑為0~3 mm時(shí),直徑方向交叉耦合的輪廓補(bǔ)償誤差曲線在理論上是平穩(wěn)而光滑的曲線,最大可能消除了曲線的輪廓誤差。
由圖9可知,當(dāng)p在給定的合理區(qū)間,自調(diào)整交叉耦合的輪廓補(bǔ)償比較平穩(wěn)而光滑,實(shí)際速度方向輪廓誤差,最大可能消除了曲線的輪廓誤差。
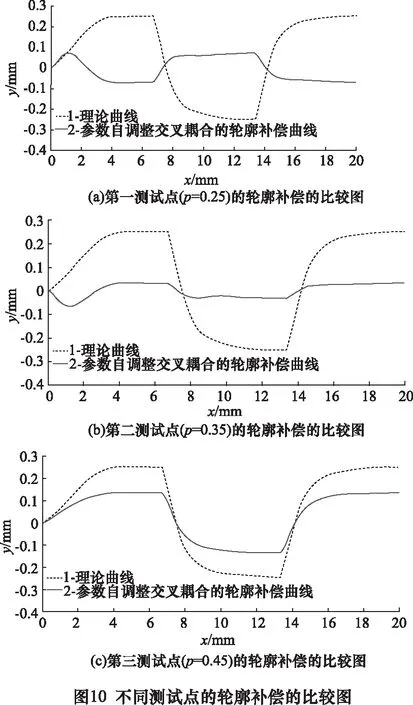
3.2.2不同測試點(diǎn)的輪廓補(bǔ)償?shù)谋容^
當(dāng)p在給定的合理區(qū)間,進(jìn)行不同測試點(diǎn)的輪廓補(bǔ)償與估計(jì)誤差補(bǔ)償?shù)谋容^,如圖10所示。
本試驗(yàn)進(jìn)行的3個(gè)測試點(diǎn)參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償是由于兩軸聯(lián)動(dòng)造成的輪廓誤差,會產(chǎn)生顫動(dòng)。由圖10可知:p越大自調(diào)整交叉耦合的輪廓越大,最大可能地消除了交叉耦合的輪廓,自調(diào)整交叉耦合的輪廓補(bǔ)償顯著性的提高,滿足高速、高精度的插補(bǔ)誤差補(bǔ)償,在參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償具有較強(qiáng)的借鑒意義。
4 結(jié)語
本文采用CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償方法,調(diào)整p進(jìn)行交叉耦合變增益控制,設(shè)計(jì)變增益交叉耦合增量C,抑制曲線多軸交叉耦合輪廓控制,使用MATLAB進(jìn)行仿真。仿真結(jié)果表明:采用CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償,可以最大可能地消除了交叉耦合的輪廓,使得自調(diào)整交叉耦合的輪廓補(bǔ)償顯著性的提高,該方法有效地提高輪廓精度,滿足高速、高精度的插補(bǔ)誤差補(bǔ)償。
最后,由于實(shí)驗(yàn)條件限制,本課題采用了MATLAB進(jìn)行了仿真驗(yàn)證,考慮實(shí)際系統(tǒng)中CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)哪P筒淮_定性情況較少。將CNC機(jī)床參數(shù)自調(diào)整交叉耦合的輪廓補(bǔ)償?shù)乃惴ǖ綄?shí)際的試驗(yàn)臺及高精度、高精密的CNC機(jī)床中,保證插補(bǔ)算法的穩(wěn)定性、兼容性。