基于機載LiDAR平臺進行內(nèi)河航道測量系統(tǒng)研究的可行性和必要性分析
2021-10-12 14:13:12徐文財
黑龍江交通科技 2021年8期
徐文財
(黑龍江省航道事務(wù)中心,黑龍江 哈爾濱 150026)
1 項目研究的可行性
1.1 機載激光測深系統(tǒng)的優(yōu)勢
(1)機載激光測深技術(shù)的原理
如圖1所示,機載激光測深技術(shù)的原理可表述為
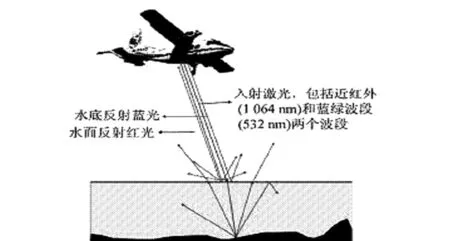
圖1 機載激光測深原理示意圖
Rg=c△tk(θ)/2n
式中:Rg為水中激光的傳播斜矩;△t為回波時間差;c表示光在空氣中的傳播速度;k(θ)為入射角θ的光徑因子;n為水折射率,隨水環(huán)境的具體情況(如溫度、壓強等因素)的變化而有所不同,可沿光路積分計算。為了簡化計算,常不顧及海水深度與水質(zhì)問題,直接采用n=1.341代替。通過平面及深度歸算,求得各個激光測點的空間位置信息及其相對于某一深度基準(zhǔn)面的深度值。
(2)測深優(yōu)勢
機載LiDAR測深的優(yōu)點主要體現(xiàn)在以下幾個方面。
①水測量能力較高。最大深度可達80 m,最小探測深度可達0.15 m,可實現(xiàn)船只無法到達水域的水深測量。在海水測驗精度在15 cm之內(nèi),滿足國際海道測量標(biāo)準(zhǔn)IHO S-44的測深精度要求。
②測深效率與水深無關(guān)。常規(guī)的多波束測深系統(tǒng)測幅一般為水深的7~8倍,而機載測深的測寬是固定的,僅與飛行高度及寬度比有關(guān),在飛行高度為600 m的情況下,掃寬能夠達到320 m。
③測量效率高,測點密度大,測量成本低。據(jù)統(tǒng)計,在淺水中機載LiDAR測深的成本僅為多波束的6%~10%;多波束系統(tǒng)每小時可以測量0.5 km2水域,而機載LiDAR測深系統(tǒng)可以完成8~12 km2的測量任務(wù),且測點密度能夠達到0.12 m×0.12 m(69 pts/m2)。
④可以高效地獲得水上水下一體化地形數(shù)據(jù)。機載LiDAR測深通過近紅外激光獲得陸地及水面高程,藍綠激光探測水底,大大提高了水上水下一體化地形無縫拼接的效率。

表1 機載LiDAR測深系統(tǒng)與船載聲波測深系統(tǒng)優(yōu)劣比較
機載LiDAR測深系統(tǒng)與聲學(xué)測深相比,以航空平臺為載體的激光測深技術(shù)具有用人少,全天候、靈活性強、成本低,效率高、適用范圍廣、采集數(shù)據(jù)類型多、人員設(shè)備安全性強等優(yōu)勢,因此具有較大的開發(fā)價值。目前全國交通、水利、農(nóng)業(yè)、環(huán)保等行業(yè)擁有水上勘測設(shè)計、施工、管理的單位和部門上千家,水上要素用戶更多,隨著經(jīng)濟的發(fā)展,未來市場需求量會大增,市場前景看好。
1.2 可行性分析
目前,機載激光測深技術(shù)雖然在國內(nèi)外已有研究并取得一定進展,但是主要是面對近海區(qū)域進行實驗,由于受海洋氣候和海水成分及海水壓強等影響,有關(guān)參數(shù)和模型一直沒有突破和完善,應(yīng)用受到影響,更談不到普及。而內(nèi)河,一是水域環(huán)境沒有海洋環(huán)境復(fù)雜,二是技術(shù)裝備和技術(shù)理論較以前有較大突破,尤其是無人機、GPS(或北斗衛(wèi)星定位導(dǎo)航系統(tǒng))、高頻激光技術(shù)、高清相機以及三維建模理論成熟等快速發(fā)展為本系統(tǒng)研發(fā)提供了理論和技術(shù)保障,三是機載激光測深系統(tǒng)從未在內(nèi)河水深測量中進行過研究和應(yīng)用,這一領(lǐng)域空白較大,前景看好。四是合作單位、專家和測繪工程技術(shù)人員儲備充足,測量艇、測深儀、GPS、成圖軟件等試驗檢驗設(shè)備齊全,五是有相關(guān)科研基金支持和自籌配套資金協(xié)助。
綜上,進行該項目的研究是切實可行的。
2 項目研究的必要性
2.1 研究的目的
一是為了航道河床水深測量、公路橋梁勘測設(shè)計進行實際應(yīng)用。二是進行內(nèi)河水深測量技術(shù)性大變革,有望打破長期依賴以艦船等水面移動載體為平臺的聲學(xué)探測技術(shù),實現(xiàn)航域水深數(shù)據(jù)無接觸采集。三是提高航道測量生產(chǎn)效率,為數(shù)字航道建立提供技術(shù)支撐和服務(wù)保障。四是填補內(nèi)河水域測量在該技術(shù)方面的國內(nèi)空白。五是為相關(guān)工程問題的解決提供全新思路。
2.2 研究的主要內(nèi)容及創(chuàng)新點
(1)研究的主要內(nèi)容包括:
①利用機載激光測深系統(tǒng)進行水深與地形測量數(shù)據(jù)采集;②無人機航空攝影平臺搭載高清攝像機進行航空攝影測量;③無人機搭載激光雷達進行過江電纜等跨河、臨河建筑物的三維激光掃描及制圖等。
(2)主要科技創(chuàng)新點包括:
①實施空地水一體化集成。利用無人機搭載集成激光掃描儀、POS定位定姿系統(tǒng)、高分辨率數(shù)碼相機、嵌入式計算機于一體的系統(tǒng)設(shè)備,實施一鍵開啟,自主采集和保存數(shù)據(jù)。可同時獲取水深數(shù)據(jù),地物地貌三維激光點云及真彩色影像,提供精確豐富的三維地理信息數(shù)據(jù);②實現(xiàn)地類地物分類提取。利用專業(yè)軟件將無人機獲取的地物地貌三維激光點云數(shù)據(jù)按需求進行分類提取。可將水深、岸線,島嶼、跨河臨河建筑物,航標(biāo)、浮標(biāo)等航道設(shè)施分類提取并表示在圖紙上;③實現(xiàn)圖形自由轉(zhuǎn)換。利用軟件的相應(yīng)功能可實現(xiàn)二維圖形和三維圖形之間,三維可視化靜態(tài)圖形和動態(tài)圖形之間的轉(zhuǎn)換。
2.3 研究擬達到的技術(shù)水平及在國民經(jīng)濟發(fā)展中的作用
目前該項目在內(nèi)河測深領(lǐng)域尚處于空白狀態(tài),研發(fā)技術(shù)水平擬定為國內(nèi)領(lǐng)先,國際先進。隨著項目在市場上的應(yīng)用將極大的提高水上測量外業(yè)的生產(chǎn)效率,降低單位生產(chǎn)能耗,減少污染物的排放,減少水上作業(yè)安全事故的發(fā)生,對國民經(jīng)濟發(fā)展起到助推作用。
2.4 必要性分析
一是新時代發(fā)展的必然要求。新形勢下科技創(chuàng)新發(fā)展已成為經(jīng)濟增長新高地,諸如5G無線網(wǎng)絡(luò)上市、無人機廣泛應(yīng)用、新能源研發(fā)炙熱等等高科技領(lǐng)域快速發(fā)展,綠色、環(huán)保、優(yōu)質(zhì)、高效已成為社會的主流趨勢,高污染、高能耗、高成本,低效率等落后產(chǎn)能逐漸被淘汰,因此我們航道事業(yè)的發(fā)展也必須與時俱進,搭載科技高速發(fā)展的列車進行科技研發(fā)與投入,以推動航道事業(yè)創(chuàng)新性高質(zhì)量發(fā)展。二是為我國交通水運高質(zhì)量發(fā)展提供新動能。無人機載激光測深系統(tǒng)作為綠色環(huán)保創(chuàng)新型新技術(shù),在交通水運基礎(chǔ)設(shè)施建設(shè)和運營中能夠發(fā)揮巨大作用。三是內(nèi)河河流,尤其是內(nèi)河封凍河流水深測量方式急需轉(zhuǎn)變的必然要求。目前我國內(nèi)河水域測量方式主要是船載超聲測量方式,耗能高,效率低,受天氣影響較大,可測水域受限,枯水期和淺水區(qū)測船難以到達。北方封凍河流開封江期間氣溫和水溫較低,水上測量人員除克服寒冷氣候帶來的影響外,還要保證水上作業(yè)安全,因此不但增加了作業(yè)人員患職業(yè)病的風(fēng)險,而且由于作業(yè)船舶荷載的加重,安全風(fēng)險因素增加。而應(yīng)用無人機載激光測深系統(tǒng)無需在水面作業(yè),有效的克服了因上述因素帶來的各種不足和安全風(fēng)險。
綜上,水深測量方式急需轉(zhuǎn)變是行業(yè)發(fā)展的必然要求。
3 結(jié) 論
針對目前我國內(nèi)河航道常規(guī)性水深測量方法數(shù)據(jù)采集時的效率低、強度大、成本高等問題,通過介紹了機載LiDAR測深原理、優(yōu)勢、設(shè)備,最大及最淺探測深度、測點密度及測深精度等關(guān)鍵技術(shù)指標(biāo),分析了國內(nèi)航道測量技術(shù)急需更新?lián)Q代和行業(yè)高質(zhì)量發(fā)展的需要,基于機載LiDAR平臺進行內(nèi)河航道測量系統(tǒng)的研究是十分必要的、迫切的、可行的,并具有重要現(xiàn)實意義。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
