基于多策略QPSO的半潛式起重平臺立柱快速壓載艙優化研究
2021-10-11 07:23:30郭蘊華高海波
船舶力學 2021年9期
關鍵詞:優化
郭蘊華,董 健,胡 義,高海波
(武漢理工大學a.高性能艦船技術教育部重點實驗室;b.能源與動力工程學院,武漢 430063)
0 引 言
半潛式起重平臺是一種重要的海洋作業平臺,其吊重能力不僅取決于吊機的性能,同時也取決于其快速壓載能力。平臺在起吊過程中,會產生巨大的傾覆力矩。為了平衡這個力矩,就需要短時間內完成壓載水的快速進水和排水。為此,一般會為半潛式起重平臺配備快速壓載系統,它由空壓機、壓縮空氣管路和快速壓載艙室等組成。
對于海洋作業平臺的壓載系統,已經有學者進行了深入研究。張茴棟等[1]以全回轉起重船為對象,通過數值分析法對壓載艙進行優化設計,對壓載艙各參數指標進行評價,并比較了原方案與優化方案結果。黃超等[2]以大型駁船型起重船為例,對比分析其常規壓載、復合壓載以及壓載艙分層等方案下的壓載效果,提出了復合壓載及壓載艙分層方案。劉志杰等[3]基于船舶靜力學和優化理論建立了起重船舶壓載水調配優化模型,利用MATLAB優化了具有8個壓載艙室的壓載水調配過程,以降低起重船舶能耗。潘偉等[4]基于Lingo軟件,對全回轉起重船作業壓載水調節量進行優化,可有效避免經驗法可能導致的危險。Samyn等[5]建立了半潛式平臺的六自由度動力學壓載水控制系統,該系統考慮了壓載艙重量、慣性以及力矩的影響。Woods等[6]針對AUV(Autonomous Underwater Vehicle)設計了兩套獨特的可變壓載裝置,這兩套壓載裝置分別控制AUV的下水深度以及重心和縱傾橫傾角度,可根據工作需要對壓載艙進行自動的進排水,實現了壓載效率的提高。上述研究都在一定程度上提高了壓載效率,但是主要集中于對壓載艙室進行分艙分層優化、壓載水調節量的優化以及壓載系統的智能化操作等方面,沒有分析快速壓載艙室幾何形狀對壓載效率的影響。
半潛式起重平臺立柱快速壓載艙優化問題是一類復雜優化問題,具有高維、非線性和復雜約束等特點。對于復雜優化問題,研究人員先后提出了遺傳算法(GA,Genetic Algorithm)[7]、粒子群算法(PSO,Particle Swarm Optimization)[8]、差分進化算法(DE,Differential Evolution)[9]、量子粒子群算法(QPSO,Quantum-behaved Particle Swarm Optimization)[10]、生物地理學優化(BBO,Biogeography-Based Optimization)[11]、人工蜂群算法(ABC,Artificial Bee Colony)[12]和布谷鳥搜索算法(Cuckoo search)[13]等智能優化算法進行求解。近年來,孫俊等[14-15]提出了GAQPSO和QPSO_RO等改進QPSO算法,對Benchmark的標準測試算例取得了較好的實驗結果。不過,由于實際工程問題的復雜性,有必要對已有算法進行改進以提高優化性能,以求獲得更好的優化設計方案。
本文提出半潛式起重平臺立柱快速壓載艙的多目標優化模型,并提出一種新穎的多策略QPSO(MSQPSO,Multi-Strategy QPSO)算法對其進行求解。計算結果表明,所提的多目標優化模型有利于提高半潛式起重平臺的壓載效率,且提出的MSQPSO算法較之于已有的智能優化算法在優化性能方面具有明顯的優勢。
1 問題描述
本文所研究的半潛式起重平臺的總體示意圖如圖1所示。該平臺主要由上船體、四根立柱、兩個浮箱組成。浮箱分為主浮箱和輔浮箱,且大小不一樣,兩臺最大起吊量為2 200 t的主吊機分別分布在上船體右舷艏艉兩處,能夠順/逆時針旋轉270°,艏艉帶線型,浮箱與立柱、立柱與上船體圓滑過渡。起吊實施的過程中平臺裝載狀態變化較大,為保持平臺作業的安全性,平臺必須具備快速壓載的功能,來保證其穩性平衡。根據總體設計,在起重和卸載工況時,僅通過對立柱快速壓載艙(CSBT,Column Side Ballast Tank)重力自流進水和壓縮空氣排水實現快速壓載和排載,而不使用其它壓載艙。立柱快速壓載艙分布在4根立柱內,為環狀結構,分別命名為MP1、MP2、OP1和OP2,其俯視布置圖如圖2所示。
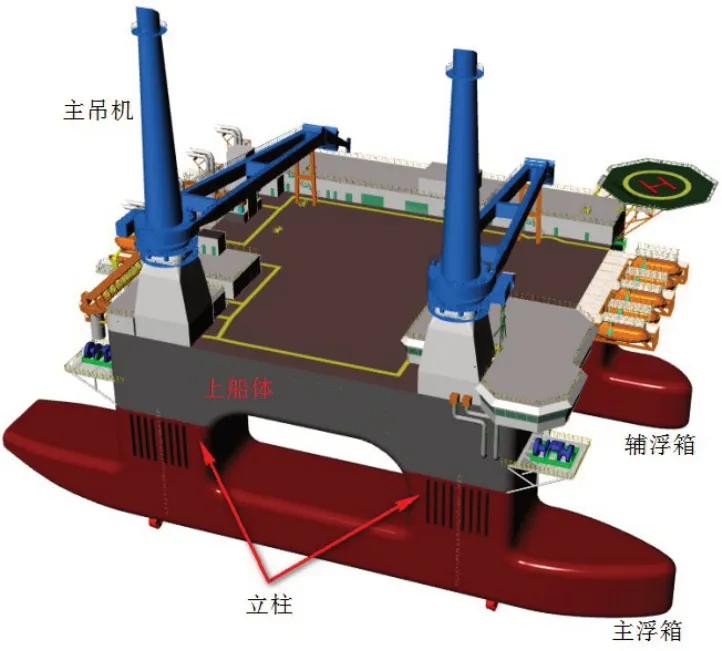
圖1 半潛式起重平臺總體示意圖Fig.1 Overall diagram of the semi-submersible crane vessel
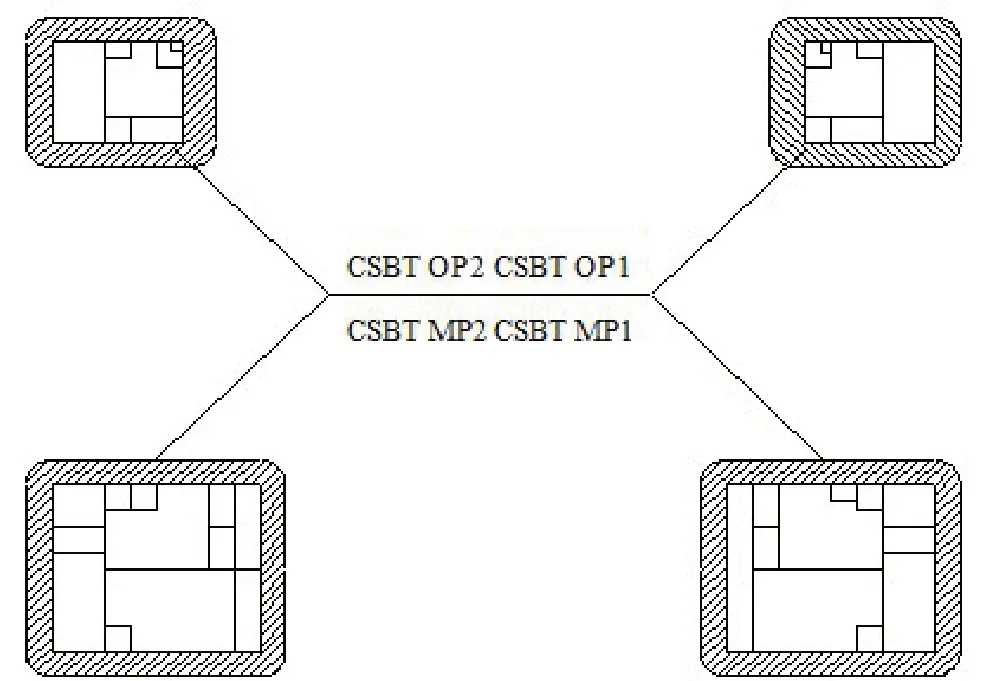
圖2 立柱快速壓載艙布置圖Fig.2 Layout of the column side ballast tanks
1.1 排水進水時間模型
1.1.1 壓縮空氣排水
壓縮空氣排水過程可以分為兩個階段,第1階段是建壓階段,此階段海底閥關閉,艙室只充入高壓氣體而不排水,且充氣前艙室內氣體壓力即為大氣壓力;等到艙室內壓強到達某一閾值時進入第2階段,此階段海底閥打開,在高壓氣體作用下從艙室排水。對于第1階段,由理想氣體狀態方程[16]可知:

式中,Qd為空壓機排氣的體積流量,Pd為空壓機排氣壓力,tc為第1階段的建壓持續時間,P1為建壓后艙室內氣體壓力,Pair為大氣壓力,V0為排水前的某壓載艙室水量體積,Vt為艙室體積。并且,P1和Pair應滿足:

式中,h0為艙室初始液位高度,hout為海平面距艙底距離,ρ為海水密度,g為重力加速度。
對于第2階段,t2時刻的壓載艙內的氣體壓力Pb(t2)和壓載水體積Vb(t2)可由式(3)和式(4)計算,

式中,s為海底閥的面積,t時刻快速壓載艙海底閥的出水流速v(t)可由伯努利方程推出,

式中,ΔP(t)為t時刻艙室內外壓力差,hb(t)為t時刻壓載艙內水位高度,k為總阻力系數。
在第2階段結束時,排水體積Vd與第2階段的持續時間tf滿足如下關系式:

所以,壓縮空氣排水的總持續時間td為

1.1.2 重力自流進水
重力自流進水過程只有一個階段,即打開海底閥,水在重力的作用下流入艙室。
在某一時刻t1,壓載艙內的壓載水體積Vb(t1)可由式(8)計算,

式中,t時刻快速壓載艙海底閥的進水流速v(t)也可由伯努利方程推出,

在重力自流進水結束時,進水體積Vg與重力自流進水的持續時間tg滿足如下關系式:

1.2 傾角和初穩性高度
平臺在起重過程中的總重量W和排水體積V由式(11)和式(12)計算:

式中,W0是平臺除四個立柱快速壓載艙室和吊物重量外其它重量總和,Wop1、Wop2、Wmp1和Wmp2分別是4個立柱壓載艙內壓載水的重量,Wload是吊物重量,ρ是海水密度。
平臺在起重過程中的自由液面產生的橫向力矩fsmt和縱向力矩fsml由式(13)和式(14)計算,

式中,fsmtop1、fsmtop2、fsmtmp1和fsmtmp2分別是四個立柱艙自由液面產生的橫向力矩,fsmlop1、fsmlop2、fsmlmp1和fsmlmp2分別是四個立柱艙自由液面產生的縱向力矩,fsmt0和fsml0分別是起重船除四個立柱艙外其它艙室的自由液面產生的總橫向力矩和總縱向力矩。
平臺在起重過程中重心的縱向坐標lcg、橫向坐標tcg和垂向坐標vcg由式(15)~(17)計算,

式中,Wi、lcgi、tcgi和vcgi是平臺各組成部分的重量以及重心的縱向坐標、橫向坐標、垂向坐標。平臺在起重過程中由自由液面產生的橫向力矩修正后的重心垂向坐標vcgfsmt和由自由液面產生的縱向力矩修正后的重心垂向坐標vcgfsml由式(18)和式(19)計算,

平臺在起重過程中的初穩性高gmt和縱穩性高gml由式(20)和式(21)計算,

式中,kml和kmt分別是平臺的縱穩心垂向坐標和橫穩心垂向坐標,可以由排水體積在靜水力曲線圖表中插值算出。平臺在起重過程中的橫傾角θheel和縱傾角θtrim由式(22)和式(23)計算,

式中,lcb和tcb分別是起重船浮心的縱向坐標和橫向坐標,可以由排水體積在靜水力曲線圖表中插值算出。起重船在起重過程中的許用重心高度余量avcgm由式(24)計算,

式中,avcg是許用重心高度,可由排水體積在許用重心高度表插值得出,vcg由式(17)定義。
1.3 艙室幾何模型
由伯努利方程可知,艙室排水的速度與艙室內的液位高度有關,如果在排水過程中艙室內的液位在一個相對較高的位置,那么排水的速度會適當加快,排水的時間會適當減少。同理,在進水過程中較高的液位會減慢進水速度,增加進水時間。但是,根據建造方提供的原始設計資料,主要典型工況的壓載時間主要取決于排水時間。如果優化了排水時間,則總的壓載時間將會減少。
因此,將立柱快速壓載艙室設計為“上大下小”的形狀,使艙室的大部分水量有較高的液位高度,可以在排水量相當的情況下縮減壓縮空氣排水時間,各立柱快速壓載艙主視圖如圖3所示。
圖3中,艙室內環兩側都由兩個直面和一個45°斜面相接而成。其中,l1和l2分別為艙室上半部分和下半部分的內環直徑,hc為內環直徑發生改變的位置。這幾個參數是優化設計變量的組成部分。
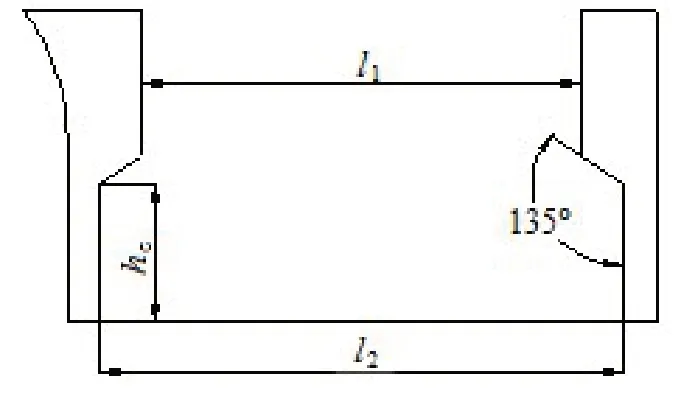
圖3 立柱快速壓載艙主視圖Fig.3 Main view of the column side ballast tank
2 多目標優化模型
本文所研究的半潛起重平臺的典型起重工況有8個,分別為:船尾起吊1 400 t、船尾起吊2 200 t、船首起吊1 400 t、船首起吊2 200 t、聯合起吊800 t/33°(起重機吊臂的仰角為33°)、聯合起吊800 t/22°(起重機吊臂的仰角為22°)、聯合起吊2 800 t和聯合起吊4 200 t。考慮壓載時間和壓載水調節量都對快速壓載系統的效率有影響,且壓載水調節量與能耗直接相關,因此以滿足橫傾角、縱傾角、穩性高、許用重心高度余量和艙室體積等多個約束條件下最小化8個工況的總壓載時間ttotal以及總壓載水調節量wtotal為目標函數,這是一個具有復雜約束的多目標優化問題。對于多目標優化問題,工程上經常通過線性加權和法將多目標問題轉化為單目標問題來進行求解。對于本文的研究問題,目標函數及其約束條件定義為
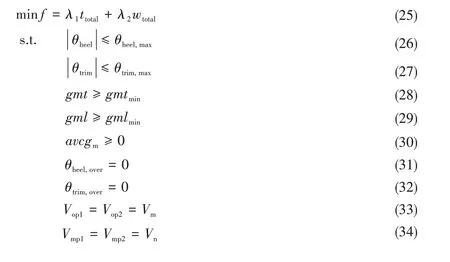
式(25)中,λ1和λ2為權系數,ttotal和wtotal分別由式(35)和式(36)計算。

式中,m=8,ti和wi分別為第i個典型工況的壓載時間和壓載水調節量,其分別由式(37)和式(38)求得,

式中,ti,op1、ti,op2、ti,mp1和ti,mp2分別為第i個典型工況4個立柱壓載艙的進水或排水時間,式(37)表明某一工況的壓載時間取這4個時間的最大值;wi,op1、wi,op2、wi,mp1和wi,mp2分別為第i個典型工況4個立柱壓載艙的進水或排水水量,式(38)表明某一工況的壓載水調節量為這4個水量之和。
根據建造方提供的資料,式(26)~(34)中,θheel,max=1.5°和θtrim,max=0.5°分別為平臺起吊過程中所允許的最大橫傾角和最大縱傾角,gmtmin=3 m和gmlmin=3 m分別為平臺起吊過程中所允許的最小初穩性高和最小縱穩性高,θheel,over和θtrim,over分別為平臺起吊完成后的橫傾角和縱傾角,Vop1、Vop2、Vmp1和Vmp2分別為四個立柱艙室的體積,Vm=1600 m3和Vn=2 250 m3分別為艙室OP1、OP2所需體積和艙室MP1、MP2所需體積。
式(26)~(30)為不等式約束,式(31)~(34)為等式約束。假定不等式約束可以統一寫為g(x)≤0,等式約束可以統一寫為h(x)=0,原目標函數為f(x),采用罰函數法定義新的目標函數F(x)為

式中,MC是不等式約束的個數,NC是等式約束的個數,K是懲罰函數因子,通常是正值。只要懲罰函數因子取值得當,可以認為F(x)的最小解足夠接近f(x)的最小解。
式(39)的優化設計變量包含6個艙室幾何形狀參數(OP1與OP2形狀相同,MP1與MP2形狀相同,因此根據圖3共有6個艙室幾何形狀參數)和32個壓載水調節量參數(8個工況,每個工況4個壓載水調節量),共38個參數,屬于高維問題。此外,壓載時間的求取依賴于對式(1)~(10)所描述的積分方程進行求解,這是典型的非線性問題;同時約束條件也不完全是線性的。可以認為,本文所建立的多目標優化模型是一個復雜優化問題。為了避免在其求解的過程中陷入局部最優,盡可能地在有限的計算資源下獲得更好的優化結果,本文提出了一種多策略QPSO算法。下面對其進行描述。
3 多策略QPSO算法
3.1 QPSO算法
QPSO算法是一種針對PSO的改進算法。已經證明,QPSO相對于PSO具有更好的全局收斂性,適合求解復雜優化問題。在QPSO算法中,用波函數來描述粒子的運動狀態,粒子在量子空間位置的概率密度函數可以由薛定諤方程得出,并使用蒙特卡羅方法模擬粒子的位置。假定QPSO中具有N個粒子,每一個粒子xk(1≤k≤N)對應于D維問題的一個解,且在第t次迭代時粒子位置可以表示為xk(t)=[xk,1(t),xk,2(t),...,xk,D(t)]。在第t+1代,粒子的位置更新公式為

式中,pk,d(t)是粒子k的局部吸引子的第d維,Lk,d(t)是粒子k的量子勢阱長度的第d維,u是(0,1)之間均勻分布的隨機數。pk,d(t)和Lk,d(t)的計算公式分別為

式(41)~(42)中,Pbestk,d(t)為粒子k的個體最優位置,Gbestd(t)為全局最優位置,φd(t)為(0,1)之間均勻分布的隨機數,α(t)是收縮-膨脹因子,Mbestd(t)為所有粒子個體最優位置的平均值

3.2 QPSO的改進策略
盡管QPSO相比PSO有一些優點,但是在迭代過程中仍有可能陷入局部最優解。如果解空間比較復雜,局部最優解的數量較多,在迭代過程中種群多樣性降低,那么就有可能出現過早成熟的現象。針對這些問題,提出了一種多策略量子粒子群算法(MSQPSO)。
3.2.1 最優個體多模式擾動策略
大量的實驗觀測表明,當所有粒子都與最優個體過于接近時,種群即有可能存在早熟停滯的風險。從這一事實出發,設計了一種針對最優個體Gbest的擾動策略:依次檢測最優個體與其它粒子的距離δk(t),若δk(t)大于某一設定閾值,則基于最優個體生成擾動粒子Ptest,若Ptest的適應值F(Ptest)好于F(Gbest),則用Ptest更新Gbest。這種針對最優個體的擾動的目的在于,有可能將最優個體推向一個與其它粒子“保持距離”的位置,且這個位置的適應值更優,從而發揮最優個體在種群中的引領作用,同時降低早熟風險。
采用多種模式構造擾動粒子,即

式中,r1、r2和r3是區間[0,D-1]之間的隨機整數,β是位于區間[2.01,2.10]之間的實數,ck、ud、和εd是位于區間(0,1)之間均勻分布的實數,levy(λ)為符合Levy分布的隨機步長,Cth(t)是動態調整的用于模式選擇的閾值,按式(45)計算,

式中,la為過去L次迭代中按式(44a)生成的Ptest成功更新Gbest的次數,lb為過去L次迭代中按式(44b1)和(44b2)生成的Ptest成功更新Gbest的次數。L為評估窗口長度,可以取值為全部迭代次數的1/10。式(45)表明,會以更大概率選中績優的擾動模式。
實際上,式(44)將擾動模式分為“自信息模式”(模式a)和“交互信息模式”(模式b)。對于模式a,擾動粒子的產生只使用了最優個體自身的信息;而對于模式b,擾動粒子的產生既使用了最優個體的信息,同時也使用了其它粒子的信息。模式b1和模式b2的區別在于:模式b1借鑒了DE算法的思想,屬于一種基于差分的擾動;模式b2借鑒了Cuckoo算法中Levy飛行的思想,有可能產生頻繁的小步長和偶爾的大步長,從而實現變尺度擾動。多模式擾動意義在于,個體行為的多樣性有可能帶來結果的多樣性,從而降低種群的早熟停滯風險。
3.2.2 局部吸引子高斯擾動策略
在GAQPSO中,提出了一個針對粒子更新公式(40)的修正公式,即

式中,npk,d(t)~N[pk,d(t), |Mbestd(t)-Gbestd(t)|],為符合高斯分布的擾動局部吸引子。本文借鑒這一思想,對npk,d(t)做進一步修正,即設定npk,d(t)~N[pk,d(t),0.6 |Mbestd(t)-Gbestd(t)|]。這一修正在一定程度上縮小了高斯擾動的方差,以避免擾動范圍過大反而帶來無效搜索。
4 實驗結果與分析
根據建造方提供的相關圖紙和數據,4個立柱快速壓載艙室未優化前8個工況的總壓載時間為3 622 s,總壓載水調節量為25 542 m3。本文采用PSO、QPSO、QPSO_RO、GAQPSO、DE、BBO、Cuckoo、ABC以及本文提出的MSQPSO等9種智能優化算法對式(39)所描述的優化目標函數進行求解。為保證算法比較的公平性和仿真結果的有效性,各算法的參數設置為:種群規模為100,自變量維度為38,最大迭代次數為2 000。每個算法運行50次,取平均值作比較。值得說明的是,Cuckoo、ABC和MSQPSO中每一次迭代中對目標函數的調用次數都大于種群規模,因此對這3種算法采取了限制迭代次數的處理,使它們的目標函數的總調用次數與其它算法持平。
9種智能優化算法的目標函數F(x)、總壓載時間以及總壓載水調節量的迭代過程如圖4所示,圖中每一代的結果均為50次運行的平均結果。表1給出了各算法50次運行的平均最優解。
根據圖4和表1,可以得出以下結論:

表1 平均最優解Tab.1 Average optimal solution


圖4 迭代過程圖Fig.4 Iterative process
(1)基于本文提出的多目標優化模型,9種智能優化算法均可以在不同程度上實現對壓載時間和壓載水調節量的優化。表明所提模型是合理的,有利于提高壓載效率。
(2)對于本文的目標函數,新近提出的BBO、Cuckoo和ABC算法較之于PSO算法并未體現出明顯的優勢(Cuckoo和ABC甚至更差);DE算法的結果好于BBO、Cuckoo和ABC;而QPSO、QPSO_RO和GAQPSO相對于PSO和DE算法有一定的優勢。
(3)通過迭代圖可知,對于目標函數F(x)、總壓載時間以及總壓載水調節量,本文提出的MSQPSO在收斂速度和全局優化性能上都好于已有算法,并且優勢非常明顯。
綜上,MSQPSO算法的優化結果最佳。該算法在平均意義上使8個典型工況的總壓載時間減少了16.8%,總壓載水調節量減少了5.1%。
5 結 語
本文以最小化8個典型工況的總壓載時間和總壓載水調節量為目標函數,以起吊過程中船體的傾角、穩性高、許用重心高度余量和艙室體積為約束條件,建立了半潛式起重平臺立柱快速壓載艙的多目標優化模型。提出了一種新穎的多策略QPSO算法——MSQPSO,用于對該模型進行求解,并將其與其它8種已有的智能優化算法進行了比較。計算結果表明,所提模型有助于提高半潛式起重平臺快速壓載系統的壓載效率,且所提MSQPSO算法相對于已有優化算法具有較大的性能優勢。在后續的研究中,將嘗試將本文提出的模型和算法應用于其它海洋平臺的優化設計。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45