柔性機(jī)構(gòu)在機(jī)器人領(lǐng)域的研究應(yīng)用現(xiàn)狀
2021-10-10 23:28:02梁晶晶李瑞琴寧峰平張啟升
科教導(dǎo)刊·電子版 2021年22期
關(guān)鍵詞:康復(fù)設(shè)計(jì)
梁晶晶 李瑞琴 李 清 寧峰平 張啟升
(中北大學(xué)機(jī)械工程學(xué)院 山西·太原 030051)
隨著工業(yè)和醫(yī)療等領(lǐng)域需求的不斷提高,機(jī)器人需要具有優(yōu)良的環(huán)境適應(yīng)性、超強(qiáng)的安全性,以及良好的人機(jī)互動(dòng)性,需要應(yīng)用柔性機(jī)構(gòu)破除傳統(tǒng)機(jī)器人關(guān)節(jié)的僵硬和材料的剛度,朝著更輕、更軟、更協(xié)調(diào)的方向發(fā)展。在這樣的背景下,“柔性機(jī)器人”應(yīng)對(duì)更高的需求不斷發(fā)展起來(lái)。通過(guò)柔軟材料的利用,驅(qū)動(dòng)方式的創(chuàng)新,在先進(jìn)制造業(yè)中可以發(fā)揮出更大的價(jià)值。
1 柔性機(jī)構(gòu)的研究現(xiàn)狀
隨著工業(yè)的發(fā)展,尤其是在精微領(lǐng)域,對(duì)機(jī)構(gòu)的精度不斷提出更高的要求,對(duì)于剛性機(jī)構(gòu)在發(fā)生彈性變形過(guò)程中產(chǎn)生的系統(tǒng)誤差已經(jīng)無(wú)法滿足更高的精度要求。隨著各國(guó)學(xué)者對(duì)柔性機(jī)構(gòu)的研究,柔性機(jī)構(gòu)中免裝配、無(wú)摩擦、可通過(guò)變形來(lái)傳遞運(yùn)動(dòng)和力、精度較高等優(yōu)勢(shì)性能不斷得到驗(yàn)證。當(dāng)今,新型材料、新的制造工藝和技術(shù)不斷出現(xiàn),在與機(jī)構(gòu)學(xué)、結(jié)構(gòu)力學(xué)以及計(jì)算機(jī)技術(shù)的相互交叉研究領(lǐng)域內(nèi),利用柔性變形的微納與仿生機(jī)器人已逐漸成為機(jī)器人學(xué)領(lǐng)域的研究熱點(diǎn)。本文根據(jù)文獻(xiàn)資料,對(duì)柔性機(jī)構(gòu)在仿生機(jī)器人及康復(fù)機(jī)器人領(lǐng)域的構(gòu)型、機(jī)構(gòu)性能、分析方法等方面的主要研究成果進(jìn)行綜述,以明確研究熱點(diǎn)和未來(lái)發(fā)展方向。
2 柔性仿生機(jī)器人
柔性機(jī)構(gòu)因具有彈性、通過(guò)變形可儲(chǔ)存和釋放能量,并且免裝配、無(wú)摩擦,這種特性可以應(yīng)用來(lái)模仿生物的柔性,如關(guān)節(jié)、腿部、翅膀等,實(shí)現(xiàn)相應(yīng)的運(yùn)動(dòng)及動(dòng)力,從而達(dá)到仿生的效果,目前已是機(jī)器人領(lǐng)域的一個(gè)主要研究方向。
國(guó)內(nèi)對(duì)于柔性仿生機(jī)器人的研究有北京航空航天大學(xué)的王田苗、孟偲等通過(guò)分析壁虎身體結(jié)構(gòu)及腿部自由度,設(shè)計(jì)并研制了柔性連桿的人造壁虎腳掌吸附材料的足式仿壁虎機(jī)器人結(jié)構(gòu),如圖7所示。分析了其運(yùn)動(dòng)原理,為了實(shí)現(xiàn)仿壁虎的柔性運(yùn)動(dòng),采用柔性連桿改進(jìn)并簡(jiǎn)化了機(jī)構(gòu)。設(shè)計(jì)對(duì)角線運(yùn)動(dòng)步態(tài)實(shí)現(xiàn)機(jī)器人的直線行走以及轉(zhuǎn)彎動(dòng)作。通過(guò)對(duì)機(jī)構(gòu)自由度的計(jì)算,分析機(jī)構(gòu)的可行性,并結(jié)合靜力學(xué)分析對(duì)柔性桿的選擇進(jìn)行討論。柔性桿件的應(yīng)用能在一定范圍內(nèi)實(shí)現(xiàn)仿生柔性運(yùn)動(dòng),但由于受材料強(qiáng)度等因素的影響,在更大范圍的柔性運(yùn)動(dòng)要求下會(huì)受到一定的限制。
西北工業(yè)大學(xué)的李巖,葛文杰等根據(jù)仿生學(xué)結(jié)合袋鼠的生物結(jié)構(gòu)特征,建立了柔性腳仿袋鼠跳躍機(jī)器人的剛?cè)峄旌夏P汀@萌嵝詸C(jī)構(gòu)可連續(xù)光滑變形及質(zhì)量輕等特點(diǎn),且易于控制,將其應(yīng)用于仿生跳躍機(jī)器人領(lǐng)域,實(shí)現(xiàn)跳躍機(jī)器人在不同跳躍速度下的腳部輪廓變形。
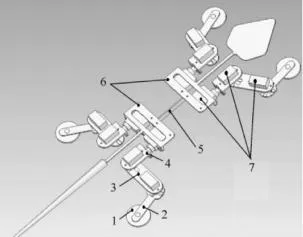
圖1:仿壁虎機(jī)器人
宗光華、賈明等設(shè)計(jì)研究了一種應(yīng)用柔性鉸鏈連接剛性桿的撲翼機(jī)構(gòu),利用柔性鉸鏈的被動(dòng)變形實(shí)現(xiàn)翅膀的翻轉(zhuǎn)運(yùn)動(dòng)。于仕澤等通過(guò)分析象鼻內(nèi)部結(jié)構(gòu),并以此為仿生設(shè)計(jì)對(duì)象,設(shè)計(jì)了一種仿生柔性機(jī)械臂,如圖8所示。柔性機(jī)械臂由8個(gè)柔性關(guān)節(jié)單元組成。柔性單元為三軸并聯(lián)平臺(tái),由3個(gè)子鏈并聯(lián)連接靜平臺(tái)與動(dòng)平臺(tái)。單個(gè)子鏈分別由1個(gè)萬(wàn)向鉸鏈、輸出軸為螺紋桿的電機(jī)和與下一個(gè)平臺(tái)連接的旋轉(zhuǎn)螺母3部分組成。柔性關(guān)節(jié)可實(shí)現(xiàn)縱向收縮,也可實(shí)現(xiàn)靈活的萬(wàn)向彎曲,下方部分可以將輸出螺紋桿進(jìn)入到上方部分,完成機(jī)構(gòu)運(yùn)動(dòng),對(duì)航天作業(yè)需求有非常強(qiáng)的適應(yīng)性。

圖2:蛇形臂機(jī)器人
魏東文等(可變結(jié)構(gòu)柔性機(jī)械臂)以章魚觸手的縱向和橫向肌肉為靈感,提出了一種柔性生物張拉整體機(jī)械手,以模擬章魚觸手的收縮行為,實(shí)現(xiàn)各節(jié)段的可變運(yùn)動(dòng)模式。機(jī)械手以彈性彈簧為骨干,由四根纜索驅(qū)動(dòng),每段有一個(gè)可變結(jié)構(gòu)機(jī)構(gòu),實(shí)現(xiàn)了對(duì)每段的獨(dú)立控制,獨(dú)立控制各節(jié)段的彎曲、收縮運(yùn)動(dòng)和變結(jié)構(gòu)運(yùn)動(dòng)。該機(jī)械臂具有各部分自由度可控的特點(diǎn),擴(kuò)展了其環(huán)境適應(yīng)性和操作能力。王姝歆等通過(guò)分析昆蟲胸翼結(jié)構(gòu),提出了一種由雙晶片壓電驅(qū)動(dòng)器、柔性雙搖桿機(jī)構(gòu)和仿生翼組成的撲翼系統(tǒng)。討論了柔性四桿機(jī)構(gòu)的運(yùn)動(dòng)學(xué)和靜力學(xué)問(wèn)題,對(duì)確定昆蟲翅膀的運(yùn)動(dòng)有一定的指導(dǎo)意義。韓國(guó)建國(guó)大學(xué)的Quoc VietNguyen等研究了仿昆蟲撲翼微型飛行器系統(tǒng),應(yīng)用曲柄連桿滑塊機(jī)構(gòu)與模擬甲蟲后翅的翅形和主脈結(jié)構(gòu)相結(jié)合,并在翼根處安裝柔性鉸鏈,使機(jī)翼在撲翼運(yùn)動(dòng)過(guò)程中由于氣動(dòng)和慣性力的合力而被動(dòng)旋轉(zhuǎn),并對(duì)撲動(dòng)性能進(jìn)行了試驗(yàn),提出了系統(tǒng)的力測(cè)量方法。哈佛大學(xué)的R.J.Wood以雙翅目昆蟲的形態(tài)為基礎(chǔ),設(shè)計(jì)、制作和分析了一種3cm翼展的微型飛行器,具有類似雙翅類昆蟲的特性,提出了一種由一個(gè)驅(qū)動(dòng)自由度和兩個(gè)被動(dòng)自由度組成的新型機(jī)翼傳動(dòng)系統(tǒng),是一個(gè)輸入端有一個(gè)移動(dòng)關(guān)節(jié)的四桿。日本法政大學(xué)的Masahiro Masuda等提出了一種適應(yīng)在廢墟中移動(dòng)的多腿機(jī)器人的柔性機(jī)構(gòu),這種柔性機(jī)構(gòu)模擬蜈蚣爬行,身體由分別含有2條腿的9個(gè)單元組成,單元之間用橡膠連接以保證柔性,每個(gè)關(guān)節(jié)可以被動(dòng)地適應(yīng)顛簸,腿部采用了一個(gè)拱形結(jié)構(gòu),以避免障礙和保持身體的剛性,可以避開(kāi)障礙也可傳播運(yùn)動(dòng),每個(gè)單元通過(guò)兩個(gè)伺服電機(jī)驅(qū)動(dòng)分別進(jìn)行垂直運(yùn)動(dòng)和前進(jìn)后退。諾丁漢制造技術(shù)大學(xué)的Xin Dong,Mark Raffles等設(shè)計(jì)了一種蛇臂機(jī)器人,如圖8所示該機(jī)器人具有獨(dú)特的雙驅(qū)動(dòng)結(jié)構(gòu),在任意構(gòu)型下都能保持索的張力。此外,該設(shè)計(jì)使柔性接頭結(jié)構(gòu)具有很大的靈活性(彎曲能力)和適當(dāng)?shù)膭偠取T诖嘶A(chǔ)上,提出了一種新的運(yùn)動(dòng)學(xué)模型,該模型可以顯著地簡(jiǎn)化纜索驅(qū)動(dòng)系統(tǒng)的運(yùn)動(dòng)學(xué)和蛇形臂機(jī)器人的雅可比矩陣。該蛇臂機(jī)器人具有柔性連續(xù)結(jié)構(gòu),可用于進(jìn)入許多領(lǐng)域的受限場(chǎng)所,如微創(chuàng)手術(shù)和工業(yè)裝配。
3 康復(fù)機(jī)器人
隨著人口老齡化趨勢(shì)越來(lái)越明顯,康復(fù)機(jī)器人市場(chǎng)進(jìn)一步擴(kuò)大,對(duì)于康復(fù)機(jī)器人的技術(shù)研究也在進(jìn)一步發(fā)展。近年來(lái),康復(fù)機(jī)器人針對(duì)不同患者不同部位的康復(fù)運(yùn)動(dòng)進(jìn)行功能復(fù)現(xiàn),基于仿生原理進(jìn)行設(shè)計(jì),應(yīng)用柔性機(jī)構(gòu),結(jié)合人體工程學(xué),輔助患者進(jìn)行康復(fù)運(yùn)動(dòng)訓(xùn)練。
孫黎霞等設(shè)計(jì)了一種繩驅(qū)動(dòng)的柔性仿人頭頸并聯(lián)機(jī)器人,3根繩索和1個(gè)壓縮彈簧連接著靜、動(dòng)平臺(tái)。壓縮彈簧和繩索分別模擬人的頸椎和頸部肌肉,起到支撐和驅(qū)動(dòng)控制作用。進(jìn)行了逆運(yùn)動(dòng)學(xué)分析和繩索驅(qū)動(dòng)力優(yōu)化設(shè)計(jì)。該研究成果有助于深入研究柔性脊柱的并聯(lián)機(jī)構(gòu)。為復(fù)現(xiàn)人頭頸的運(yùn)動(dòng)提供重要參考,同時(shí)可促進(jìn)頸部康復(fù)機(jī)器人和繩索驅(qū)動(dòng)技術(shù)的發(fā)展。上海理工大學(xué)孟巧玲等,在分析半圓弧梁型柔性鉸鏈剛度的基礎(chǔ)上,設(shè)計(jì)了半圓弧梁鉸鏈串聯(lián)式仿生外骨骼機(jī)械手,如圖9所示,通過(guò)電機(jī)驅(qū)動(dòng)繩索實(shí)現(xiàn)手指彎曲,當(dāng)手指需要伸展時(shí),控制電機(jī)反轉(zhuǎn)放松繩索,利用鉸鏈在屈曲過(guò)程中的儲(chǔ)能來(lái)幫助患者的手恢復(fù)伸展?fàn)顟B(tài),并根據(jù)齊次坐標(biāo)變換建立機(jī)械手的運(yùn)動(dòng)學(xué)模型,研究繩驅(qū)下的運(yùn)動(dòng)特性,通過(guò)實(shí)驗(yàn)分析和仿真分析,外骨骼機(jī)械手能夠輸出滿足日常生活所需的抓握力,可提供正常的關(guān)節(jié)活動(dòng),可實(shí)現(xiàn)對(duì)手功能障礙患者進(jìn)行手部康復(fù)訓(xùn)練與日常活動(dòng)。針對(duì)目前截肢患者對(duì)仿生假手的需求越來(lái)越大,張曉華等提出了一種具有靈活手指的靈巧機(jī)械手。機(jī)械手具有兩個(gè)自由度的彈簧柔性手指,其中一個(gè)自由度是正的,另一個(gè)是被動(dòng)的,由彈簧實(shí)現(xiàn)。機(jī)械手可以抵抗沖擊并適應(yīng)物體的形狀,可以作為末端執(zhí)行器應(yīng)用在各種環(huán)境中。應(yīng)用柔性鉸鏈替代剛性關(guān)節(jié)可以在一定程度上實(shí)現(xiàn)康復(fù)運(yùn)動(dòng)功能,但是柔性鉸鏈通過(guò)變形實(shí)現(xiàn)彎曲,其角度是有限的,無(wú)法實(shí)現(xiàn)滿足大范圍運(yùn)動(dòng)需求,因此有一定的局限性。

圖3:仿生柔性機(jī)械臂的整體結(jié)構(gòu)

圖4:仿生外骨骼機(jī)械手手指結(jié)構(gòu)
龐在祥等提出了一種仿生柔性腕關(guān)節(jié)并聯(lián)機(jī)構(gòu),如圖10所示,它是一種繩索驅(qū)動(dòng)、壓縮彈簧支撐的混合機(jī)構(gòu)。為了實(shí)現(xiàn)腕部機(jī)構(gòu)的運(yùn)動(dòng),采用并聯(lián)結(jié)構(gòu)支撐移動(dòng)平臺(tái),由一根電纜控制,起到腕部肌肉的作用。該機(jī)構(gòu)的設(shè)計(jì)為柔性關(guān)節(jié)并聯(lián)機(jī)構(gòu)復(fù)制人類手腕運(yùn)動(dòng)提供了新的思路,在一定程度上促進(jìn)了康復(fù)機(jī)器人和繩驅(qū)動(dòng)技術(shù)的發(fā)展。
王才東研制了一種踝關(guān)節(jié)輔助康復(fù)機(jī)器人,該機(jī)器人由上平臺(tái)、下平臺(tái)、背屈/足屈驅(qū)動(dòng)系統(tǒng)、內(nèi)翻/外翻驅(qū)動(dòng)系統(tǒng)及其連接部分組成。根據(jù)SPS機(jī)構(gòu),上平臺(tái)通過(guò)球銷副和兩個(gè)驅(qū)動(dòng)分支鏈與下平臺(tái)連接。機(jī)器人有兩個(gè)自由度,但上面的平臺(tái)可以實(shí)現(xiàn)三種運(yùn)動(dòng)。為了實(shí)現(xiàn)踝關(guān)節(jié)輔助康復(fù),患者在上平臺(tái)上的踝關(guān)節(jié)進(jìn)行仿生運(yùn)動(dòng)。該機(jī)器人以一個(gè)中心球銷對(duì)作為主要支撐來(lái)模擬踝關(guān)節(jié)的運(yùn)動(dòng);驅(qū)動(dòng)系統(tǒng)采用剛?cè)峄旌辖Y(jié)構(gòu),背屈/足底屈運(yùn)動(dòng)和內(nèi)翻/外翻運(yùn)動(dòng)是分離的。這些結(jié)構(gòu)特征可以避免對(duì)患者的繼發(fā)性損害。

圖5:腕部康復(fù)柔性并聯(lián)機(jī)構(gòu)
S.Bhavani等提出了一種繩驅(qū)動(dòng)的柔性仿生手臂,仿生手臂通過(guò)收集來(lái)自截肢肌肉的信號(hào)來(lái)運(yùn)作。仿生手臂由3d打印的手部結(jié)構(gòu)、用于監(jiān)測(cè)肌肉活動(dòng)的myoware傳感器,一個(gè)arduino處理器,六個(gè)馬達(dá)和一個(gè)可伸縮的手套組成。該柔性仿生手臂解決了假肢使用費(fèi)用高、佩帶重的問(wèn)題,能夠幫助患者有效地抓取各種物體。
4 結(jié)論
柔性機(jī)構(gòu)在并聯(lián)機(jī)器人、仿生機(jī)器人、康復(fù)機(jī)器人等領(lǐng)域得到了廣泛應(yīng)用。柔性機(jī)器人是未來(lái)機(jī)器人發(fā)展的重要趨勢(shì),針對(duì)柔性機(jī)構(gòu)設(shè)計(jì)理論中存在的精度問(wèn)題和結(jié)構(gòu)拓?fù)浞ù嬖趨?shù)較多的問(wèn)題,在理論設(shè)計(jì)上通過(guò)構(gòu)型分析與尺度綜合,研究柔性機(jī)構(gòu)集成化的優(yōu)化設(shè)計(jì)方法,實(shí)現(xiàn)柔性結(jié)構(gòu)簡(jiǎn)化和輕量化設(shè)計(jì),并通過(guò)對(duì)柔性鉸鏈的結(jié)構(gòu)形式和材料方面設(shè)計(jì)大行程柔性鉸鏈,解決柔性鉸鏈運(yùn)動(dòng)范圍受限的影響,擴(kuò)大柔性機(jī)構(gòu)應(yīng)用范圍。新型柔性機(jī)構(gòu)不斷涌現(xiàn),柔性機(jī)構(gòu)應(yīng)用不斷擴(kuò)展,日益增加的應(yīng)用需求同時(shí)也在導(dǎo)引柔性機(jī)構(gòu)設(shè)計(jì)理論及方法的快速發(fā)展,未來(lái)柔性機(jī)器人通過(guò)對(duì)新型軟材料的應(yīng)用,以及創(chuàng)新的驅(qū)動(dòng)方式,從適應(yīng)性、安全性、互動(dòng)性等多角度出發(fā),會(huì)很大程度上改善柔性機(jī)器人的性能。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
廣東醫(yī)科大學(xué)學(xué)報(bào)(2020年6期)2020-02-06 06:00:56
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
特別健康(2018年2期)2018-06-29 06:13:44
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國(guó)衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:33:14