基于CNN的機(jī)載氣象雷達(dá)氣象目標(biāo)檢測(cè)方法
2021-10-08 04:51:58喻慶豪朱岱寅
雷達(dá)科學(xué)與技術(shù) 2021年4期
喻慶豪, 吳 迪, 朱岱寅, 錢 君
(1. 南京航空航天大學(xué)電子信息工程學(xué)院雷達(dá)成像與微波光子技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室, 江蘇南京 211106;2. 中國(guó)航空工業(yè)集團(tuán)公司雷華電子技術(shù)研究所, 江蘇無錫 214063)
0 引言
機(jī)載氣象雷達(dá)是一種實(shí)時(shí)預(yù)報(bào)降水量的遙感設(shè)備。實(shí)際應(yīng)用中,雷達(dá)一般工作在下視模式。當(dāng)雷達(dá)天線方向圖主瓣或旁瓣照射到地面時(shí),來自地面物體的散射回波往往會(huì)湮沒氣象目標(biāo)信號(hào),嚴(yán)重影響氣象參數(shù)的準(zhǔn)確估計(jì),從而惡化機(jī)載氣象雷達(dá)的工作性能[1]。回波中的強(qiáng)地雜波背景在目標(biāo)檢測(cè)過程中會(huì)產(chǎn)生大量的虛警,增加了氣象目標(biāo)檢測(cè)的難度[2]。因此氣象目標(biāo)的識(shí)別是必不可少的。
解決氣象目標(biāo)檢測(cè)問題,通常需要以下兩個(gè)過程[3]:1) 結(jié)合時(shí)域、多普勒域和俯仰維空域的相關(guān)信息,計(jì)算可區(qū)分氣象目標(biāo)與地雜波的判別函數(shù);2) 根據(jù)判別函數(shù)設(shè)計(jì)性能較優(yōu)的分類器,實(shí)現(xiàn)氣象目標(biāo)檢測(cè)。目前已有文獻(xiàn)利用地雜波和氣象目標(biāo)在譜矩信息方面的差異,設(shè)計(jì)了針對(duì)地基氣象雷達(dá)的目標(biāo)檢測(cè)函數(shù)。由于靜止地物目標(biāo)后向散射回波在慢時(shí)間域的相位具有低可變性[4],雜波相位對(duì)準(zhǔn)(Clutter Phase Alignment, CPA)技術(shù)利用此特性實(shí)現(xiàn)對(duì)氣象目標(biāo)的判別。相位起伏指標(biāo)(Phase Fluctuation Index,PFI)和相位結(jié)構(gòu)函數(shù)(Phase Structure Function,PSF)根據(jù)相鄰采樣脈沖間相位的變化快慢程度區(qū)分地雜波和氣象目標(biāo)。與固定地雜波相比,氣象目標(biāo)回波的相位變化更快[1,5]。譜雜波識(shí)別(Spectrum Clutter Identification,SCI)算法利用四種判別函數(shù),即譜功率分布(Spectral Power Distribution, SPD)、譜相位起伏(Spectrum Phase Fluctuation, SPF)、功率紋理(Power Texture, PT)和譜寬紋理(Spectrum Width Texture, SWT),結(jié)合時(shí)域和頻域信息實(shí)現(xiàn)對(duì)地雜波和氣象目標(biāo)的判別[6-8]。
除判別函數(shù)外,分類器的設(shè)計(jì)也是一項(xiàng)重要的工作。一般來說,模糊邏輯方法定義了極化變量和特定類型的水凝物之間的非線性關(guān)系,利用此非線性關(guān)系實(shí)現(xiàn)水凝物分類[9-12]。然而,模糊邏輯方法的檢測(cè)性能并不穩(wěn)定。此外,貝葉斯分類器、K近鄰(K-Nearest Neighbor, KNN)算法,支持向量機(jī)(Support Vector Machine, SVM)和CNN同樣可應(yīng)用于氣象目標(biāo)檢測(cè)中[1,5,13-18],而且國(guó)內(nèi)外學(xué)者已經(jīng)證明以上分類網(wǎng)絡(luò)在圖像識(shí)別和圖像分類等方面具有明顯的效果[3,19-22]。
本文提出了一種基于CNN的氣象目標(biāo)檢測(cè)方法。該方法利用垂直陣列系統(tǒng)獲取氣象目標(biāo)的俯仰維信息,并根據(jù)雙通道雷達(dá)回波數(shù)據(jù)計(jì)算干涉相位。然后將CPA、多普勒速度和干涉相位作為三種判別函數(shù)一同輸入到分類器中,進(jìn)而得到最終的檢測(cè)結(jié)果。仿真結(jié)果表明,該方法比傳統(tǒng)的判別函數(shù)方法具有更好的檢測(cè)性能,而且CNN比傳統(tǒng)的分類器具有更好的魯棒性。
1 基于CNN的氣象目標(biāo)檢測(cè)方法
本文方法的整體處理流程如圖1所示。本文選用CPA、多普勒速度和補(bǔ)償后的干涉相位作為判別函數(shù),在進(jìn)行氣象目標(biāo)檢測(cè)前,應(yīng)先設(shè)計(jì)合適的CNN分類器,即設(shè)計(jì)CNN的網(wǎng)絡(luò)結(jié)構(gòu),并使用合適的數(shù)據(jù)作為訓(xùn)練集數(shù)據(jù)對(duì)CNN進(jìn)行訓(xùn)練至模型收斂,并能在驗(yàn)證集數(shù)據(jù)中有理想的準(zhǔn)確率和損失結(jié)果。
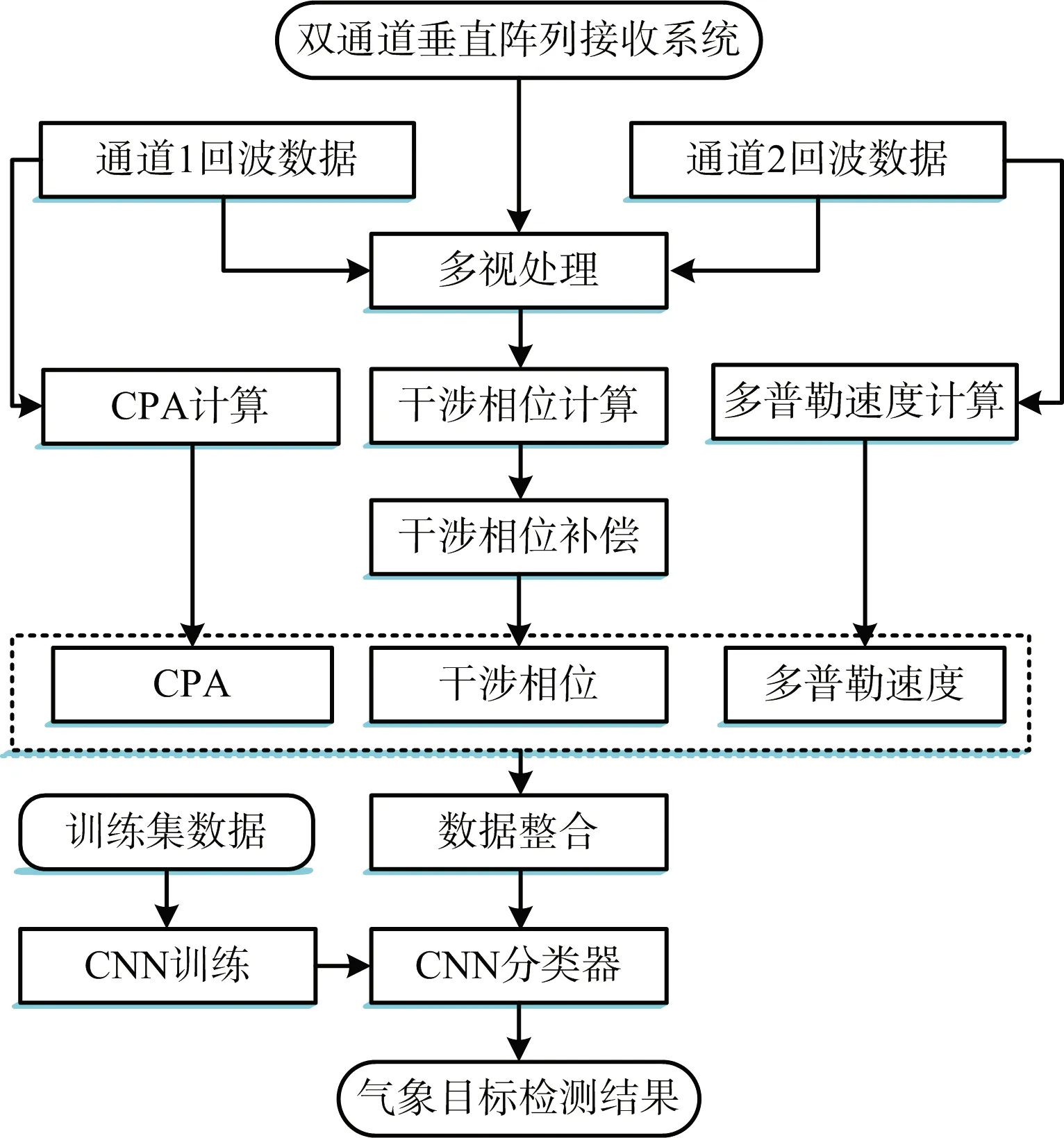
圖1 基于CNN的氣象目標(biāo)檢測(cè)方法流程圖
在氣象目標(biāo)檢測(cè)時(shí),首先通過垂直陣列接收雙通道雷達(dá)原始數(shù)據(jù),通過多視處理和干涉相位補(bǔ)償?shù)玫酱龣z測(cè)的干涉相位數(shù)據(jù),并根據(jù)回波計(jì)算CPA和多普勒速度。并將上述三種指標(biāo)作為判別函數(shù),并整合成適合CNN輸入的數(shù)據(jù)形式,再輸入到訓(xùn)練好的CNN中即可得到氣象目標(biāo)的檢測(cè)結(jié)果。
2 判別函數(shù)的選擇
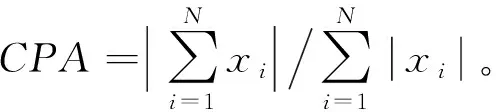
2.1 CPA
2.2 多普勒速度
本節(jié)利用脈沖對(duì)處理法(Pulse Pair Processing, PPP)通過回波提取多普勒速度信息。脈沖對(duì)處理法不需要知道整個(gè)多普勒功率譜的詳細(xì)結(jié)構(gòu),在時(shí)域直接計(jì)算得到譜的統(tǒng)計(jì)特征值。
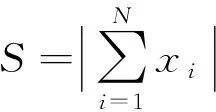
設(shè)回波幅度的復(fù)振幅為S(t)=I(t)+jQ(t),I(t)、Q(t)分別為S(t)的實(shí)部和虛部。回波信號(hào)中取樣樣本數(shù)為N,則樣本自相關(guān)函數(shù)為

j(Qi+1Ii-Ii+1Qi)]
(1)
脈沖重復(fù)間隔為Tr的相繼兩個(gè)回波信號(hào)的相位差為
(2)
式中,arctan{·}是反正切函數(shù)算子。因此多普勒平均頻率可估計(jì)為
(3)
地雜波分量的多普勒速度在0 m/s附近;而氣象目標(biāo)通常被認(rèn)為是緩慢移動(dòng)的目標(biāo),因此氣象目標(biāo)具有非零多普勒速度特性。因此多普勒速度有能力檢測(cè)出地雜波中的氣象目標(biāo)。
2.3 干涉相位
與CPA和多普勒速度兩種判別函數(shù)不同,干涉相位是一種基于俯仰空域的氣象目標(biāo)檢測(cè)函數(shù)。為獲取氣象目標(biāo)的空間高度信息,本文采用俯仰雙通道系統(tǒng)采集雷達(dá)回波數(shù)據(jù), 對(duì)應(yīng)的二維空間幾何接收模型如圖2所示。在俯仰通道接收模式下,干涉相位與下視角(即空間位置)有關(guān)。因此,在干涉相位圖中,由于地雜波和氣象目標(biāo)高度不同,二者對(duì)應(yīng)的干涉相位值也會(huì)存在差異,因此可利用干涉相位區(qū)分氣象信號(hào)分量和地雜波分量。
圖2 二維空間幾何接收模型
本文選擇線性調(diào)頻信號(hào)(LFM)作為發(fā)射信號(hào)采集雷達(dá)數(shù)據(jù),散射點(diǎn)P接收的回波信號(hào)經(jīng)解調(diào)后如下所示:
exp{jπk(τ-rs(t)/c)2}·
exp{-j2πfc·(rs(t)/c)}+n(t,τ)
(4)
式中,k為線性調(diào)頻信號(hào)的線性調(diào)頻率,Tr為脈沖持續(xù)時(shí)間,c為電磁波傳播速度,η為信號(hào)幅度,rs(t)/c表示電磁波從發(fā)射機(jī)傳播到點(diǎn)P再由點(diǎn)P反射回接收機(jī)的總時(shí)間。為了簡(jiǎn)化分析,將忽略信號(hào)中的干擾成分n(t,τ)。則經(jīng)過距離向脈沖壓縮的信號(hào)為
(5)
式中,sinc{x}=sin(πx)/(πx),其中第1部分為脈沖壓縮后信號(hào)幅度,對(duì)于兩個(gè)不同的接收機(jī)R1,R2,rs(t)可以被表示為
(6)
一般來說,雙通道系統(tǒng)的回波信號(hào)是相同的,但在式(5)第2部分中的相位有所不同。因此兩通道的相位差可以表示為

(2π/λ)·dsinθ0
(7)
式中,d表示陣元間距,θ0表示P點(diǎn)處的入射角。則對(duì)于地雜波的干涉相位可以表示為
φA1A2_C=(2π/λ)·dsinθc
(8)
需要注意的是,在實(shí)際應(yīng)用中,氣象信號(hào)在空間高度上的分布是不規(guī)則的,這就導(dǎo)致了入射角的變化。也就是說,氣象回波是由多個(gè)入射角的回波疊加而成。由氣象信號(hào)得到的干涉相位與天線方向圖和氣象場(chǎng)景的反射率因子有關(guān)。為了簡(jiǎn)化分析,在圖2中假設(shè)氣象回波數(shù)據(jù)來自恒定入射角。因此,純氣象信號(hào)的干涉相位計(jì)算如下:
φA1A2_W=(2π/λ)·dsinθw
(9)
根據(jù)圖2中幾何關(guān)系可知,設(shè)φA1A2_W+C為氣象目標(biāo)和地雜波的混合信號(hào),則同一距離門內(nèi)氣象目標(biāo)和地雜波混合信號(hào)的干涉相位取值范圍是
(2π/λ)·dsinθw<φA1A2_W+C≤
(2π/λ)·dsinθc
(10)
對(duì)于垂直陣列系統(tǒng),干涉相位與方位角無關(guān)。因此,在相同距離處,干涉相位在方位角上保持不變。干涉相位提供了判別哪些區(qū)域可能包含天氣信號(hào)的信息。設(shè)雙通道系統(tǒng)中和通道接收信號(hào)為SS,差通道的接收信號(hào)是SD,則待檢測(cè)的干涉相位圖可計(jì)算為
InP=arg{[SD+SS]·[SD-SS]*}
(11)
式中,[·]*為共軛算子,arg{·}表示相位運(yùn)算符。對(duì)地雜波而言,探測(cè)距離的變化會(huì)引起下視角的變化,進(jìn)而影響雜波的干涉相位值。因此需要逐距離門對(duì)由距離變化引起的固有相位差進(jìn)行干涉相位補(bǔ)償才可得到待檢測(cè)的干涉相位值。假設(shè)探測(cè)距離為R,載機(jī)飛行高度為H,在此距離門處地面目標(biāo)對(duì)應(yīng)的下視角為θc,且sinθc≈H/R,因此干涉相位的補(bǔ)償量為
PC=2πdH/Rλ
(12)
經(jīng)過干涉相位補(bǔ)償后,地雜波分量的干涉相位值會(huì)趨近于0,而混合信號(hào)的干涉相位值應(yīng)偏離0。干涉相位利用氣象目標(biāo)和地雜波的空間高度信息不同來檢測(cè)氣象目標(biāo),可有效避免低脈沖重復(fù)頻率(Pulse Repetition Frequency,PRF)對(duì)多普勒頻譜展寬和多普勒模糊的影響。因此,根據(jù)補(bǔ)償后的干涉相位,可利用俯仰空域信息實(shí)現(xiàn)氣象目標(biāo)檢測(cè)。
3 CNN分類器設(shè)計(jì)
近年來,GPU計(jì)算能力的大幅度提升以及神經(jīng)網(wǎng)絡(luò)軟件搭建網(wǎng)絡(luò)框架的極大便利性,使得CNN在學(xué)術(shù)界和工業(yè)界越來越受青睞,CNN被廣泛應(yīng)用于圖像分類,人臉識(shí)別等多個(gè)領(lǐng)域。因此,鑒于CNN強(qiáng)大的分類能力,本文利用此網(wǎng)絡(luò)處理氣象回波數(shù)據(jù),實(shí)現(xiàn)對(duì)氣象目標(biāo)的檢測(cè)。
本文將雷達(dá)回波數(shù)據(jù)預(yù)先處理成三種判別函數(shù)的形式,根據(jù)到CNN的卷積計(jì)算原理,將三種判別函數(shù)整合成一個(gè)三維數(shù)組。在處理過程中,CNN被視為滑動(dòng)窗口檢測(cè)器,需要在數(shù)據(jù)中逐像素點(diǎn)滑動(dòng)并輸出判斷結(jié)果。將CNN的輸入數(shù)據(jù)的大小設(shè)置為3×32×32,因此每個(gè)待檢測(cè)像素點(diǎn)的最終檢測(cè)結(jié)果取決于待測(cè)單元周圍3×32×32的三維數(shù)據(jù)在CNN中的輸出。
訓(xùn)練CNN網(wǎng)絡(luò),需要生成或是找到合適的數(shù)據(jù)作為訓(xùn)練集。訓(xùn)練集的原始數(shù)據(jù)需要先通過計(jì)算得到三種判別函數(shù),并將其整合成三維數(shù)據(jù),然后分成若干組3×32×32大小的數(shù)據(jù),最后根據(jù)先驗(yàn)信息將這些數(shù)據(jù)分別賦予地雜波和氣象目標(biāo)的標(biāo)簽。為了防止每組數(shù)據(jù)主要由噪聲像素點(diǎn)組成,用時(shí)為了使CNN有足夠且有效的樣本進(jìn)行訓(xùn)練,這里選用至少一半像素點(diǎn)為氣象或是地雜波的數(shù)據(jù),而且為了使樣本的選取更具有代表性,選擇像素點(diǎn)的原始數(shù)據(jù)的幅度不應(yīng)該太低。
利用CNN可以詳細(xì)分析出所選的三種判別函數(shù)和兩種回波數(shù)據(jù)之間的非線性關(guān)系。本文所設(shè)計(jì)的CNN模型的網(wǎng)絡(luò)結(jié)構(gòu)如表1所示,它由5個(gè)卷積層(Convolutional Layer),1個(gè)全連接層(Fully Connected Layers, FC)和2個(gè)最大池化層(Max-pooling Layer)組成,此網(wǎng)絡(luò)選擇線性整流函數(shù)(Rectified Linear Unit, ReLU)作為激活函數(shù),同時(shí)為了改善流經(jīng)網(wǎng)絡(luò)的梯度,提高訓(xùn)練速度,在網(wǎng)絡(luò)中設(shè)置批量歸一化(Batch Normalization,BN)。將三維輸入數(shù)據(jù)輸入到網(wǎng)絡(luò)中,通過每一層網(wǎng)絡(luò)的處理和計(jì)算,最后通過Softmax函數(shù)計(jì)算氣象目標(biāo)和地雜波被取到的概率并與檢測(cè)門限比較,輸出最終檢測(cè)結(jié)果。
表1 CNN結(jié)構(gòu)及屬性
4 實(shí)驗(yàn)結(jié)果與分析
本節(jié)利用仿真數(shù)據(jù)驗(yàn)證所提出方法的有效性,為此生成兩組機(jī)載雷達(dá)仿真數(shù)據(jù),主要參數(shù)見表2。為了訓(xùn)練前一節(jié)中設(shè)計(jì)的CNN,首先利用第一組數(shù)據(jù)作為訓(xùn)練集數(shù)據(jù),使用該數(shù)據(jù)分別計(jì)算出CPA,多普勒速度和補(bǔ)償后的干涉相位,并將三種判別函數(shù)的計(jì)算結(jié)果整理成三維數(shù)據(jù)的形式。
表2 仿真數(shù)據(jù)和實(shí)測(cè)數(shù)據(jù)對(duì)應(yīng)的主要參數(shù)
為了證明這三種判別函數(shù)的特征選取是有效的,如圖3所示,對(duì)訓(xùn)練集數(shù)據(jù)中的CPA、干涉相位和多普勒速度三維數(shù)據(jù)進(jìn)行特征分類空間描述,圖中,藍(lán)色散點(diǎn)和紅色散點(diǎn)的位置分別代表地雜波與氣象目標(biāo)對(duì)應(yīng)的判別函數(shù)值在該三維空間中的分布情況。從圖中可以看出,地雜波和氣象目標(biāo)對(duì)應(yīng)的兩種點(diǎn)跡在CPA-多普勒速度-補(bǔ)償后的干涉相位構(gòu)成的三維空間中有明顯的界限,這可說明特征選取的有效性和正確性。
圖3 地雜波與氣象目標(biāo)在三種判別函數(shù)空間中的分布
利用上一節(jié)提到的數(shù)據(jù)存儲(chǔ)方式,從此三維數(shù)據(jù)中提取10 000組3×32×32大小的數(shù)據(jù),標(biāo)記為氣象目標(biāo),同時(shí)提取10 000組數(shù)據(jù)標(biāo)記為地雜波。然后從上述20 000組數(shù)據(jù)中隨機(jī)選取14 000組作為訓(xùn)練集數(shù)據(jù)來訓(xùn)練CNN,余下6 000組數(shù)據(jù)作為驗(yàn)證集,以觀察訓(xùn)練過程中準(zhǔn)確率曲線和損失曲線的變化情況。訓(xùn)練過程中采用具有動(dòng)量隨機(jī)梯度下降法(Stochastic Gradient Descent with Momentum, SGDM)訓(xùn)練設(shè)計(jì)的網(wǎng)絡(luò),將epochs設(shè)置為15,學(xué)習(xí)率(Learning Rate)設(shè)置為0.01。經(jīng)過訓(xùn)練,檢測(cè)驗(yàn)證集的準(zhǔn)確率可以達(dá)到99.60%,檢測(cè)驗(yàn)證集的損失降低至0.021,此時(shí)額外的訓(xùn)練不會(huì)改進(jìn)模型,CNN模型達(dá)到收斂狀態(tài)。
訓(xùn)練好CNN后,就可以用CNN進(jìn)行氣象目標(biāo)檢測(cè),圖4給出了在測(cè)試集中三種判別函數(shù)的計(jì)算結(jié)果以及氣象目標(biāo)的真值圖,真值圖中,“1”表示含有氣象目標(biāo)分量的像素點(diǎn),“0”表示只有地雜波分量的像素點(diǎn)。由于飛機(jī)運(yùn)動(dòng)帶來的多普勒頻移使得CPA和多普勒速度在數(shù)值上與理論值存在偏差,而在CNN的作用下測(cè)試中平臺(tái)速度對(duì)分類結(jié)果的影響可忽略,不需要補(bǔ)償多普勒信息,直接對(duì)原始回波進(jìn)行分析即可。
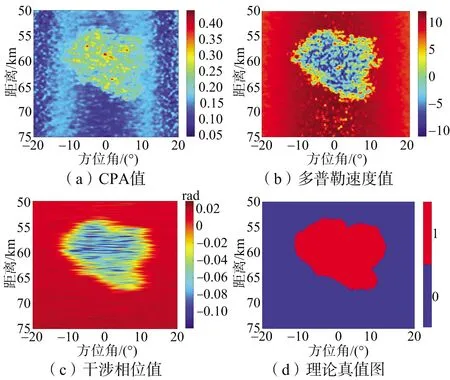
圖4 三種判別函數(shù)的計(jì)算結(jié)果及理論真值圖
為了更直觀地反映本文方法的檢測(cè)性能,將正確分類為氣象目標(biāo)的像素點(diǎn)標(biāo)記為TP,將錯(cuò)誤分類為氣象目標(biāo)的像素點(diǎn)標(biāo)記為FP。類似地,將正確分類為地雜波的像素標(biāo)記為TN,錯(cuò)誤分類為地雜波的像素標(biāo)記為FN。在圖5中,在信雜比為5 dB的情況下,將該方法檢測(cè)結(jié)果與CPA、多普勒速度和PFI三種氣象目標(biāo)檢測(cè)方法的檢測(cè)結(jié)果進(jìn)行比較。如圖5所示,雖然本文提出的方法在信噪比較低的區(qū)域仍然有一些被誤判為FP和FN的像素點(diǎn),但具有最好的檢測(cè)性能。由于飛機(jī)的運(yùn)動(dòng),使得原始回波數(shù)據(jù)中的多普勒信息惡化。依賴于多普勒信息的CPA,多普勒速度和PFI等檢測(cè)方法的性能明顯較差。然而,本文提出的方法結(jié)合了多普勒域和空域的信息,在譜矩信息惡化的情況下仍可獲得較好的性能。
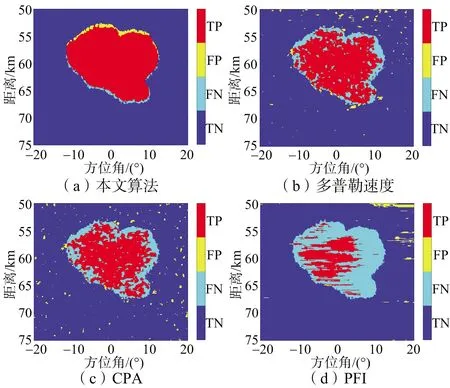
圖5 利用不同方法得到的氣象目標(biāo)檢測(cè)結(jié)果
進(jìn)一步地,利用檢測(cè)概率和虛警概率定量分析幾種方法的性能,檢測(cè)概率和虛警概率分別定義為
(13)
圖6給出了在Pfa=0.001 4時(shí),不同檢測(cè)方法對(duì)應(yīng)的檢測(cè)概率隨信雜比的變化關(guān)系。結(jié)果表明,相比于其他方法,所提方法在檢測(cè)概率方面具有更優(yōu)的性能。
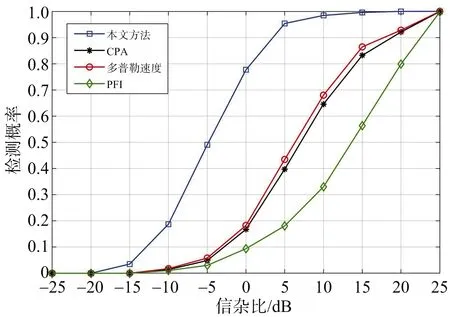
圖6 不同信雜比下各種檢測(cè)方法對(duì)應(yīng)的檢測(cè)性能曲線
此外,為了驗(yàn)證譜矩特性對(duì)各種方法檢測(cè)性能的影響,在合理情況下,設(shè)定信雜比為5 dB,分別改變地雜波的譜寬和氣象目標(biāo)的多普勒頻移,得到圖7和圖8對(duì)應(yīng)的檢測(cè)概率曲線。可見,由于譜寬的增加,基于多普勒信息的氣象目標(biāo)檢測(cè)方法的性能有所下降,而本文方法結(jié)合了多普勒信息和空域信息,有效降低了由譜寬增加帶來的檢測(cè)性能的惡化。而多普勒頻移較低時(shí),幾種基于多普勒信息的檢測(cè)方法的檢測(cè)概率都不是非常理想,但本文方法在多普勒頻移較低時(shí),能夠有比較高的檢測(cè)概率;且在多普勒頻移比較高時(shí),本文方法的檢測(cè)概率仍比另外幾種算法更高,突出了本文方法的優(yōu)越性。
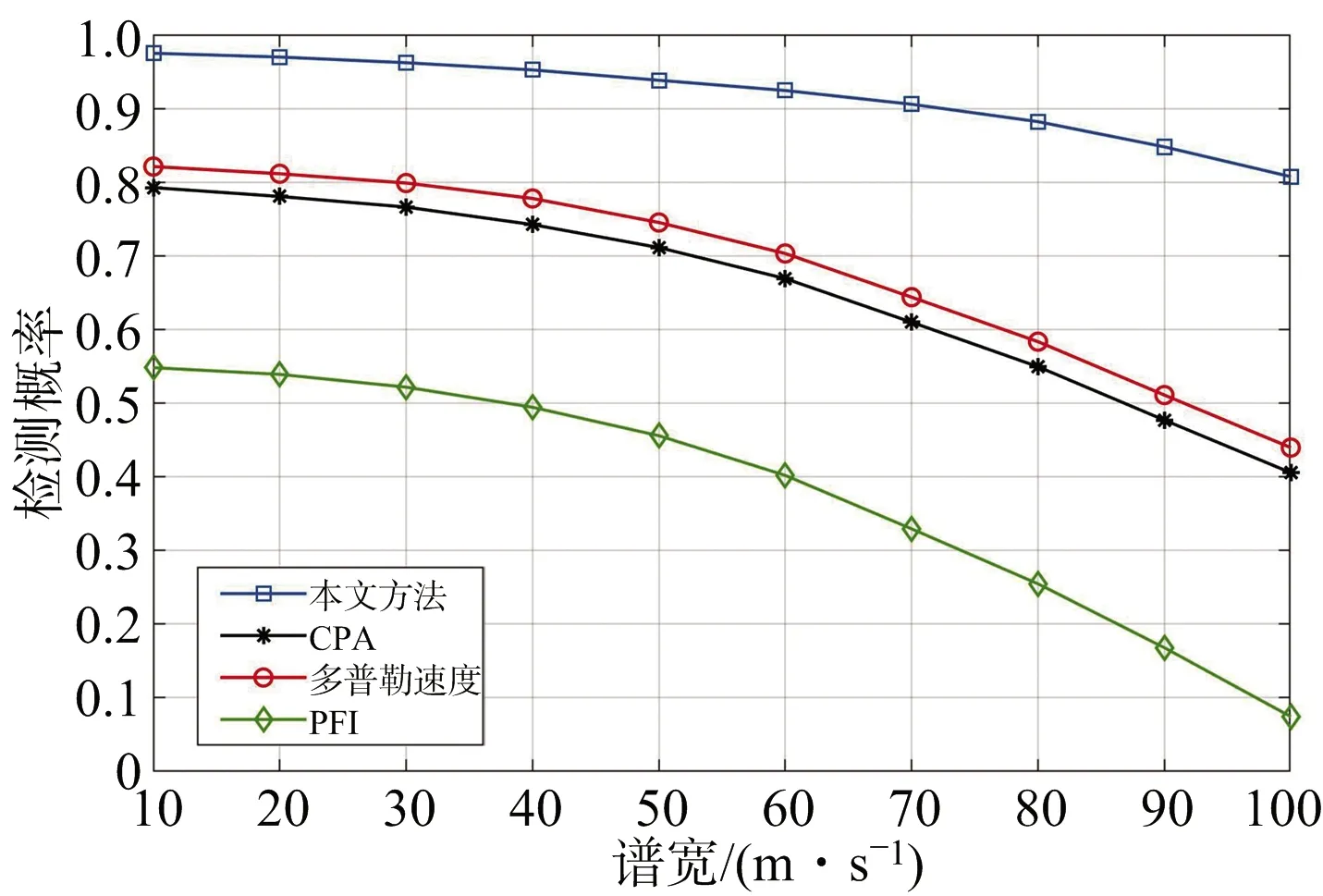
圖7 不同地雜波譜寬下各種檢測(cè)方法對(duì)應(yīng)的檢測(cè)性能曲線
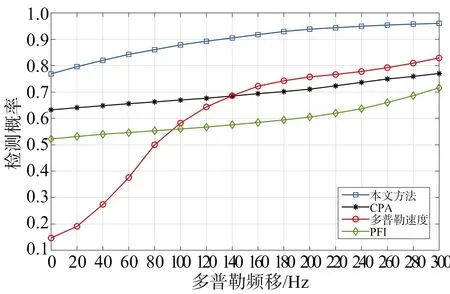
圖8 不同氣象目標(biāo)多普勒頻移下各種檢測(cè)方法對(duì)應(yīng)的檢測(cè)性能曲線
為了突出CNN的優(yōu)越性,使用相同的訓(xùn)練數(shù)據(jù)集來訓(xùn)練貝葉斯分類器和支持向量機(jī),并用訓(xùn)練好的貝葉斯分類器和支持向量機(jī)對(duì)圖5中涉及到的測(cè)試數(shù)據(jù)集進(jìn)行了處理,檢測(cè)結(jié)果如圖9所示。結(jié)合圖9和圖5(a)的檢測(cè)結(jié)果,可以看出,兩種常規(guī)分類方法的檢測(cè)結(jié)果中存在較多的FP和FN像素點(diǎn)。因此,采用CNN作為氣象目標(biāo)的分類器是一種較好的選擇。
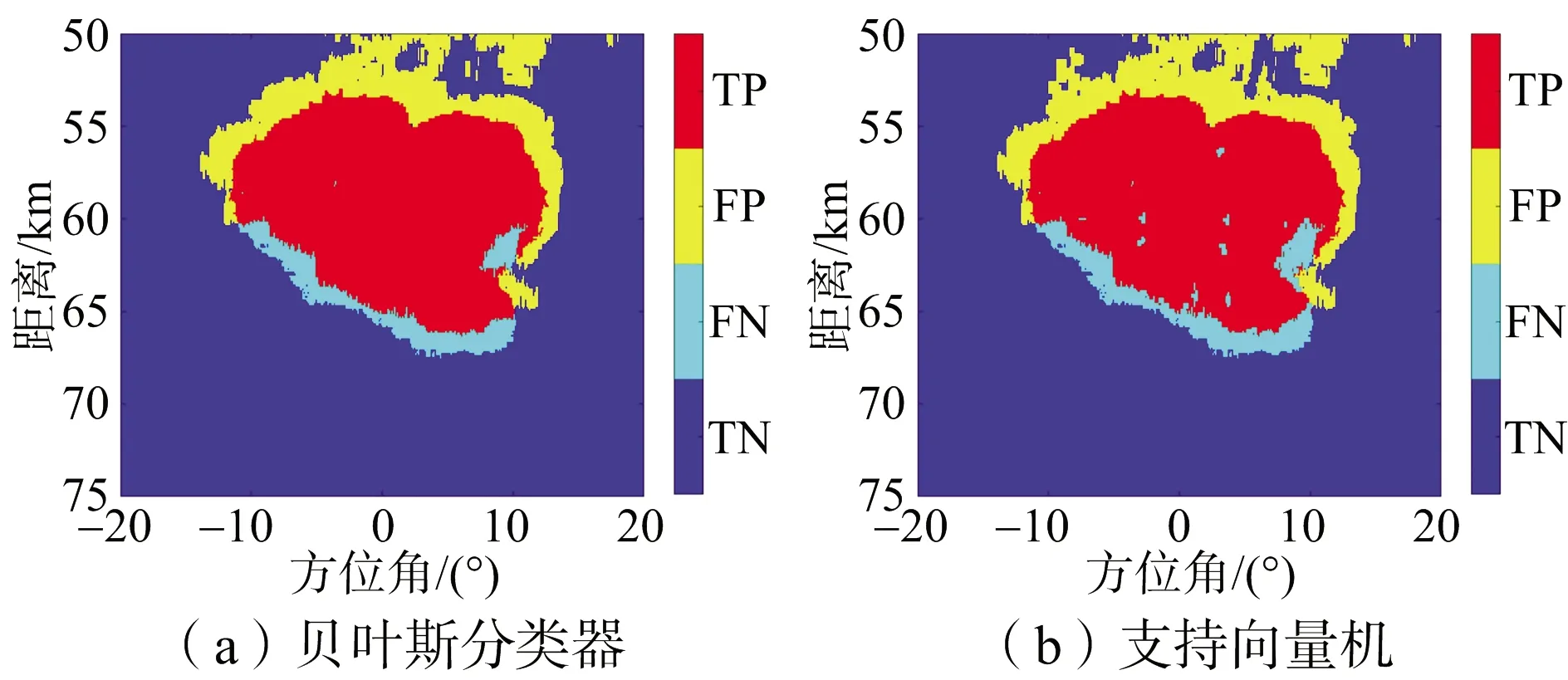
圖9 使用不同分類器對(duì)應(yīng)的檢測(cè)結(jié)果
5 結(jié)束語(yǔ)
為檢測(cè)強(qiáng)地雜波背景中的氣象目標(biāo),本文提出了一種基于CNN的目標(biāo)檢測(cè)方法。該算法結(jié)合多普勒域信息和空域信息,將CNN作為分類器實(shí)現(xiàn)對(duì)氣象目標(biāo)的檢測(cè)。文中詳細(xì)講述了該方法的實(shí)現(xiàn)流程以及CNN的具體結(jié)構(gòu),并通過仿真結(jié)果表明,該方法可有效用于氣象目標(biāo)的檢測(cè)。與現(xiàn)有的大多數(shù)方法相比,該算法具有更優(yōu)的檢測(cè)性能,并能很好地克服譜矩信息變化帶來的影響,具有一定的實(shí)用價(jià)值。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12