提高車載平視顯示器觀看亮度的微結構膜設計
2021-10-04 11:46:10庹長富呂國強徐立業馮奇斌
光學精密工程 2021年8期
庹長富,呂國強,徐立業,馮奇斌,王 梓*
(1.合肥工業大學 儀器科學與光電工程學院,安徽 合肥 230009;2.合肥工業大學 特種顯示技術國家工程實驗室 現代顯示技術省部共建國家重點實驗室光電技術研究院,安徽 合肥 230009;3.合肥工業大學 電子科學與應用物理學院,安徽 合肥 230009)
1 引 言
車載平視顯示器(Head Up Display,HUD)是將汽車行駛信息以及導航、短信、電話和郵件等信息進行圖像化后,通過光學元件和擋風玻璃形成的成像系統在人眼視野前方2~5 m處形成虛像的一種輔助駕駛工具。據統計駕駛員駕駛過程中低頭查看儀表信息的平均時間約為1~3 s,以城市道路60 km/h的平均車速計算,駕駛員注意力離開路面3 s,相當于閉著眼睛駕駛50 m,因此導致了很多的交通事故[1]。抬頭顯示技術可以一定程度上緩解駕駛信息交互和行車安全之間的矛盾。
車載HUD主要有擋風玻璃HUD(Wind‐shield HUD,WHUD)和組合型HUD(Combiner HUD,CHUD)兩類。前者顯示效果好,成本較高;后者聯動性差并且需要占用額外的空間,但其價格便宜,使用范圍廣。隨著我國汽車市場的不斷增大,以及人們安全意識的不斷提高,對車載HUD的需求不斷增加。車載HUD的質量要求也不斷提高,如更高的顯示亮度,更好的成像質量,更強的環境融合效果,以及同樣顯示質量下更低的能耗等。近年來,武晨晨等人通過設計光學微結構膜提高車載HUD微投影系統的背光亮度,以提高像源圖像的亮度從而提高HUD的顯示亮度[2];歐高焓等人針對具有高的成像質量和環境融合效果的車載AR-HUD,設計了一種基于離軸反射的汽車AR-HUD光路系統[3];Yan等人設計并制作了用于微型平視顯示器的微結構膜[4];Okumura等人制作并分析了反射式微結構陣列對HUD成像質量的影響[5]。但是,目前對于優化系統提高系統光效等方面的研究還比較少。
本文分析了HUD固定的眼盒觀看區域外依然存在投影光線的原因,通過分析HUD成像系統的等效光路,計算出每個像素點上散射光線完全進入Eyebox區域內時的散射角度,并設計光學微結構將該角度以外一定范圍內的光線調控至Eyebox區域內。
2 分析和設計
2.1 車載HUD系統
車載HUD系統的基本結構如圖1所示,主要由信息圖像化處理單元(Picture Generation Unit,PGU)、微投影系統和反射式成像系統三部分組成。PGU將顯示信息轉換成圖像數據傳輸給投影儀,投影儀將圖像投射到散射屏幕上形成像源圖像;散射光線進入與之匹配的反射成像系統中,最后反射到使用者的眼部附件附近形成Eyebox。
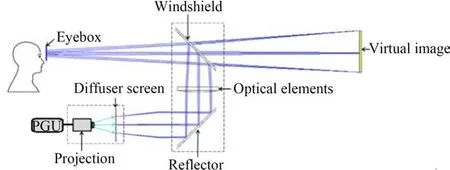
圖1 車載HUD系統的基本結構Fig.1 Basic structure of vehicle HUD system
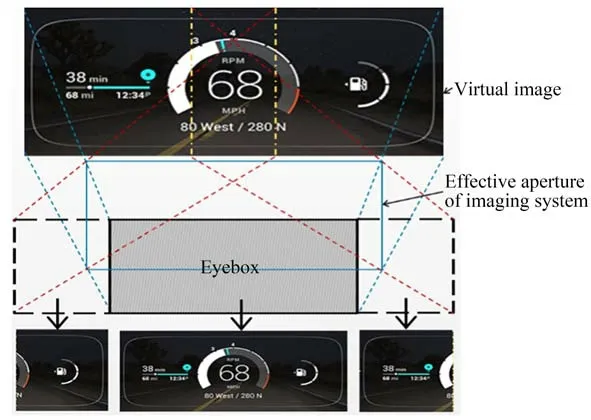
圖2 HUD系統的雜散光Fig.2 Stray light in HUD system
2.2 設計參數的分析與推算
HUD反射成像系統的等效光路如圖3所示。其中,OE表示具有一定焦距f的透鏡組,用于對像源圖像在觀看側進行成像,所成的實像就是在Eyebox區域內透過擋風玻璃觀看到的虛像的物;θA和θT分別表示投影散射屏幕在水平方向的實際散射角和最適散射角,根據屏幕亮度視角的定義,這里將θA和θT定義為散射角度的半高半寬(Half Width at Half Maxim,HWHM),即亮度值下降為最大亮度50%處的角度。為了方便描述,將投影儀發出的光線稱為主光線,主光線在散射屏幕上發生散射后與主光線傳播方向不一致的光線稱為散射光線。通過分析HUD系統的等效光路可以發現,投影光線投射到Eyebox觀看區域以外的主要原因有:(1)散射屏幕的實際散射角θA過大,如圖3(a)所示,對于第i列像素點發出的具有一定發散角度的光線,當θA>θT時,散射光線進入成像系統后投射到Eyebox以外的區域;如圖3(b)所示,當θA=θT時,投影光線剛好全部投射到Eyebox區域內,此時的散射角度θT為最適散射角度;(2)投影儀發出的主光線經過成像系統后,沒有會聚在Eyebox中心點處,導致分布于主光線兩側的散射光線總會有一側的部分光線落入Eyebox區域之外。
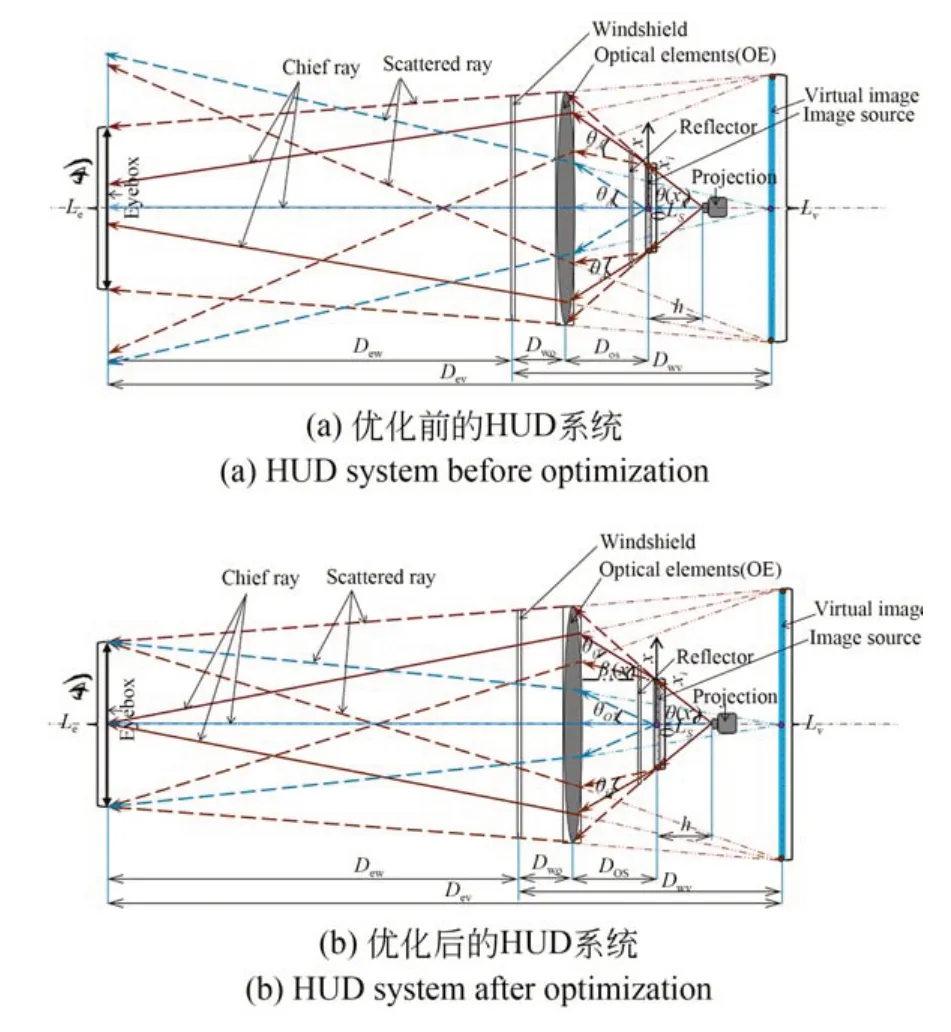
圖3 車載平視顯示器的光路Fig.3 Optical path of head-up display rehicle
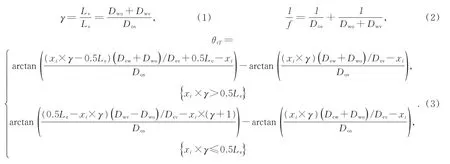
這兩個影響因素之間也存在著一定的聯系。根據調研,設置其固定的系統參數如表1所示。表中,Dev為Eyebox到虛像之間的距離;Le為Eye‐box的 尺 寸 參 數;Dew為Eyebox到 擋 風 玻 璃 之 間的距離;Lv為虛像尺寸;Dwo為擋風玻璃到OE之間的距離;Ls為像源尺寸;Dwv為擋風玻璃到虛像之間的距離;Dos為OE到像源之間的距離;x為屏幕上任意一點到屏幕中心的距離;h為投影距離。記第i列像素的中心點的位置xi為該列像素點的計算位置,基于屏幕的對稱性,因此只考慮屏幕上右半部分像素點的情況,xi=(i-0.5)×d(i=1,2,…,640),d為像素寬度。根據放大率γ公式(1)、高斯成像公式(2)以及等效光路的幾何關系[5,8],可得第i列像素的最適散射角θiT的表達式為:

表1 HUD系統參數表Tab.1 Parameters of HUD system
由散射屏幕的散射特性可知,θiT的角平分線就是xi點發出的主光線,且該光線過Eyebox中心點,再根據式(1)和式(2)可推導出該列像素點上任意點x的主光線偏轉角βi(x)為:

由此得到屏幕上所有像素點主光線的偏轉角度。
2.3 微結構的面型設計
為了解決上述2個問題,微結構面型設計主要有兩個步驟:首先分析圖3所示的等效光路,計算主光線需要通過微結構所達到的偏轉角度,并根據這組關系計算出一個菲涅爾透鏡實現投影主光線的偏轉。但是由于散射屏幕的散射角度過大,因此下一步是將每列像素點發出的散射光線收縮至式(3)計算的最適散射角度θiT。
微結構膜在應用時與散射屏幕的距離非常貼近,微結構與像素點的寬度均在幾十微米量級,因此需要將每列像素點看作一個獨立的擴展光源進行微結構面型設計。針對收縮擴展光源調控面型的設計,Wu等人提出了一種根據特定的輸入、輸出條件進行迭代計算的方法[9]。但是該方法只適用于擴展光源能量為對稱分布的面型,且確定初始面型的方法沒有與特定輸出條件相聯系,導致最后結果與特定輸出條件之間存在一定的偏差。
據介紹,加拿大是世界上最大的氯化鉀生產國和出口國之一,已知儲量為幾十億噸,按目前全世界的需求水平來計算,可供開采幾百年,加拿大目前的氯化鉀生產能力達到3000萬噸/年。自1972年成立以來,加拿大鉀肥公司已銷售近2億噸鉀肥,覆蓋60個國家,超過125位客戶,其中已累計向中國供應4000多萬噸鉀肥。
本文在上述方法的基礎上提出了一種針對擴展光源能量分布為非對稱分布的面型設計方法。該方法在確定擴展光源輸入和輸出條件的前提下,將能反映輸出特點的偏轉面型作為計算完整面型的初始面型,然后通過迭代計算實現對初始(偏轉)面型的優化補償,得到滿足要求的完整面型。迭代計算的過程是在初始面型上劃分出n個等間距的采樣點,從初始面型的一端開始計算擴展光源的邊界光線在一個采樣點處的出射角度,并保持面型上該采樣點以后的所有采樣點處出射光線都為該出射角度;通過光線反向追跡確定計算點處出射光線在擴展光源上的入射亮度,根據在微結構面型上各點處以特定角度出射的光線的亮度積分等于出射光線在該角度下的光強這一性質[10],在初始面型另一端的端點的切線上計算出一個新的面型數據點。重復上述計算過程,直至面型上某一采樣點上的出射光線的角度等于式(3)計算的最適散射角度,此時迭代計算結束。
2.3.1 偏轉面型計算
本文根據式(4)進行具有偏轉作用的菲涅爾透鏡的設計。圖4(a)所示為主光線偏轉示意圖。根據實驗所使用的投影儀的參數可知,主光線入射角為:θ(x)=actan(x60),x為各列像素點到屏幕中心垂線之間的距離,偏轉面型的作用就是將θ(x)偏轉到βi(x),使所有像素點中心的主光線均會聚于Eyebox中心點,中心點兩側的主光線按理想光路的成像特性分布在像素中心點兩側。圖4(b)為計算的初始面型的部分面型,C1iC2i為第i列像素點所需要的偏轉面型,其寬度等于像素點的寬d。
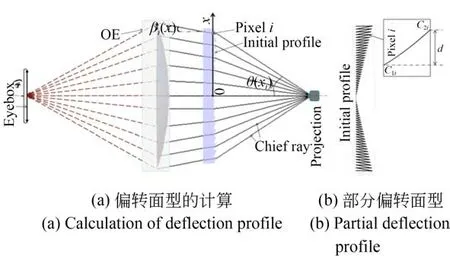
圖4 初始面型Fig.4 Initial profile
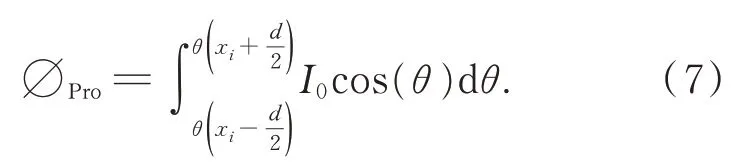
在進行面型迭代計算之前,需要先根據實際情況確定輸入和輸出的條件。如圖5(a)所示,當入射光線以一定角度θ(x)穿過散射屏幕上一點時,其光線能量分布一般為余弦-冪函數,且對稱分布在θ(x)的兩側[11-12]。因此,建立散射屏幕上各點的亮度函數L(x,α):

式中α為該點處散射光線的角度范圍,滿足α∈[θ(x)-θA,θ(x)+θA]。對實驗所使用的散射屏幕進行測量得θA=±22°,根據對θA的定義取式(5)的冪指數為9;L0為待定系數。因此,散射屏幕上單列素點i在散射角α范圍內的總光通量?Diff為:

由于投影圖像具有很好的亮度均勻性,可將投影光線設置為朗伯發光強度:I=I0×cosθ,則單列像素點i上的總光通量?Pro為:
假設系統為能量無損系統,則有:?Diff=?Pro,由此確定出L(x,α)中的參數L0。
如圖5(b)所示,對于每一列像素點i的輸出目標光強函數Ii(δ),應該具有兩個必要的特征:(1)Ii(δ)應是一個HWHM值 為θT的函數;(2)由于輸出函數是一個光強函數(定義一個點的能量分布),即需要以該像素寬度上某一點的特征來代表整個像素點的特征,因此以該像素上中心點xi處主光線的出射角度βi(xi)作為整個像素點輸出光強函數的特征。結合輸入函數的特點,將第i列像素點的輸出光強分布函數假設為:

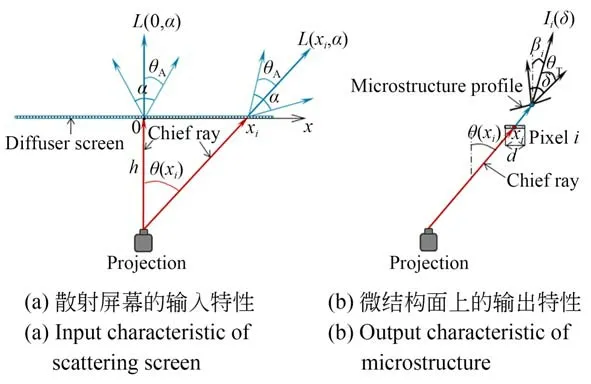
圖5 輸入輸出條件Fig.5 Input and output conditions
其中:δ為該像素點輸出光強的角度范圍,滿足δ∈[βi(xi)-θT,βi(xi)+θT],Ii0為待定系數。根據2.2對θiT的推算,取式(8)的冪指數為26,則出射光線在δ范圍內的總光通量?out可表示為:

忽略微結構對光線能量的吸收,則有:?Diff=?out,由此可確定Ii(δ)的參數Ii0。
2.3.2 迭代面型計算
確定好輸入和輸出條件后,開始在初始面型C1iC2i上進行迭代計算。根據對輸出條件的分析可知,特定出射角度δ是關于βi(xi)對稱分布的,因此以βi(xi)為界把微結構的迭代計算分為左右兩部分:通過對δ∈[βi(xi),βi(xi)+θT]內 的 遍歷,完成對右側迭代面型的計算;通過對δ∈[βi(xi)-θT,βi(xi)]內的遍歷,完成對左側迭代面型的計算。
這里以像素點i右側迭代面型的計算為例,對迭代過程進行說明。如圖6(a)所示,首先在C1iC2i上的n個等間距采樣點Pj(j=1,2,…,n)處對出射角δ1=βi(xi)的光線進行反向追跡,計算入射光線xj Pj在擴展光源S1iS2i上的位置xj和入射 角αj,根 據 式(5)計 算Pj的 亮 度 值L(xj,αj),L(xj,αj)構成一個關于出射光線間距l的亮度函數fδ1(l),記 兩 邊 界 光 線 之 間 的 距 離 為lδ1,有l∈[0,lδ1];則C1iC2i上的出射光強I(δ1)等于亮度函數fδ1(l)在[0,lδ1]上的積分[10],如下:

根據式(10)在Pn的切線上確定一點Pn+1,使得:I(δ1)=Ii(δ1),Pn+1就是右側迭代面型上的第一點。如圖6(b)所示,連接S2i Pn+1,根據折射定律計算Pn+1點處以δ1角度出射的切線,為計算下一點Pn+2做準備。連接S1i P2,即讓擴展光源的左邊界點以α2入射,重復計算Pn+1點的方法,在Pn+1的切線上得到Pn+2點及其切線,直到在面型上存在一點Mr,使得S2i Mr的角度α等于S2i點的最大散射角αmax。對于像素點i有:αmax=arctan((xi+0.5d)/60)+θA。根據多次計算的經驗發現當α=αmax時,出射光線的角度δmax也在δ=βi(xi)+θT這個最大出射角附近。因此,可以認為完成了右側迭代面型的計算。
圖6 迭代面型計算過程Fig.6 Calculation process of iterative profile
如 圖6(c)所 示,對 于 出 射 角δ∈[βi(xi)-θT,βi(xi)]內的左側迭代面型,計算方法是相同的,不同之處是需要從初始面型C1iC2i右側的Pn-1點向左側P1(C1i)點進行亮度積分計算,得到面型上的數據點。直至面型上存在如圖6(d)所示的一點Ml,使得光線S1i Ml的入射角度α等于該點最小散射角度αmin=arctan((xi-0.5d)/)60-θA,此時完成了左側迭代面型的計算。
重復上述計算過程,完成對屏幕上右半部分像素點的微結構面型計算,然后鏡像得到左半部分像素點的微結構。最后,將設計好的二維微結構形貌向垂直方向進行拉伸形成柱狀光學微結構,實現對該列像素點水平方向散射角度的調控,幾乎不改變垂直方向上光線的出射角度[13]。
3 實 驗
3.1 設計結果及仿真分析
圖7(a)為根據上述設計方法使用MATLAB編程計算的微結構膜的一半,圖7(b)為i=640時的微結構面型。該微結構膜是由每個像素點的微結構排列在相應的位置形成,將其鏡像得到微結構膜的另一半。
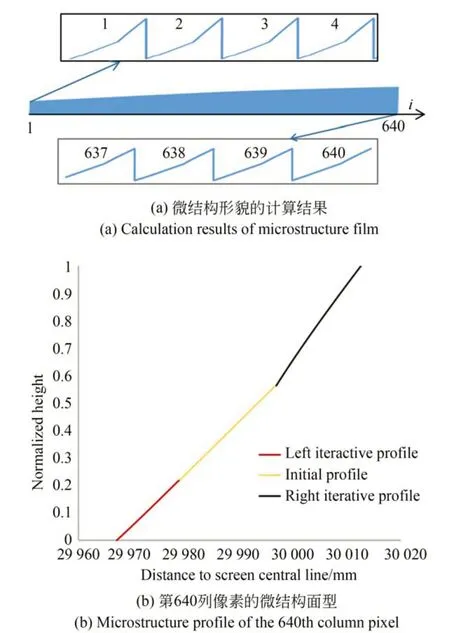
圖7 微結構面型Fig.7 Microstructure profile
如圖8(a)所示,使用LightTools光學仿真軟件對所設計的微結構膜進行建模仿真。以點光源的光線作為投影儀發出的光線,使用遠場接收器測量出射光線的空間光強分布。圖8(b)為有微結構和無微結構膜時調控方向光強分布的仿真結果。該結果表明,本文設計的微結構增亮膜可以將散射膜的HWHM值從±22°縮小到±14°左右。
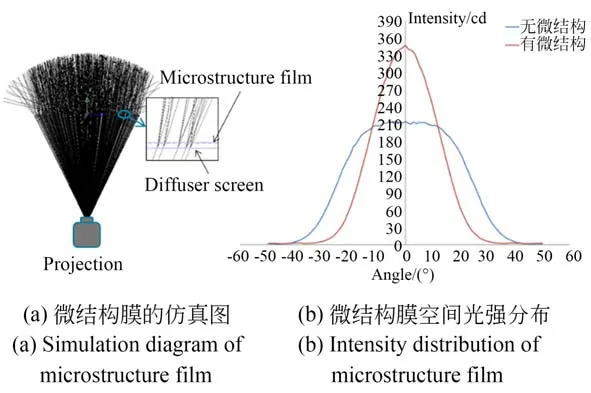
圖8 仿真結果Fig.8 Simulation results
如圖9所示,根據圖3等效光路的幾何關系,計算像源面型上各點±22°和±14°內的出射光線經過成像系統后在Eyebox平面上的位置,坐標原點為光軸方向。計算發現,有微結構膜時(±14°)進入Eyebox區域的光通量比沒有微結構(±22°)時增加了40%左右。圖10為使用Light‐Tools光學仿真軟件得到的HUD系統仿真模型。圖11(a)和圖11(b)分別為有無微結構膜時Eye‐box區域內的光強分布,可以看出,有微結構膜時最大光強提高了36%左右,平均光強提高了33.6%左右。

圖9 ±22°和±14°光線在Eyebox面的位置Fig.9 Position of±22 ° and±14 ° lights on eyebox plane

圖10 HUD系統的仿真模型Fig.10 Simulation model of HUD system

圖11 HUD系統的光強分布Fig.11 Intensity distribution of HUD system
3.2 實際加工及實驗測試
微結構形貌的加工使用德國Heidelberger公司的MLA100型無掩膜光刻機完成,并使用Carl Zeiss公司的LSM700型激光共聚焦顯微鏡對加工的微結構形貌進行檢測。圖12(a)是對實際加工的微結構形貌的檢測結果;圖12(b)為設計面型與實際面型的對比,可以看出實際加工的面型與設計面型基本一致。以光刻加工的微結構形貌作為模板,采用納米壓印技術將微結構形貌壓印到透明的PET材料上,形成如圖12(c)所示的微結構增亮膜。

圖12 微結構膜加工結果Fig.12 Preparation result of microstructure film
為了測試所設計的微結構膜對HUD系統的增亮效果,本文參照2.1設置的系統結構參數,搭建了如圖13(a)所示的HUD實驗測試系統。該系統中的OE使用滿足口徑和焦距需求的菲涅爾投影透鏡實現[14],其顯示效果如圖13(b)所示。圖13(c)是使用日本TOPCON公司的BM-7A型亮度計在暗室環境下對虛像上多個矩形亮斑中心點處的亮度進行測試[15],測量點的平均亮度如表2所示。由測量結果可知,在使用微結構增亮膜后其平均亮度約為362.8 nit,比沒有微結構膜的情況提高了31.7%左右。
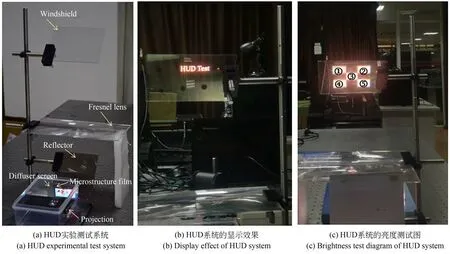
圖13 實驗設備及結果Fig.13 Experimental setup and results
4 結 論
本文提出了一種微結構膜設計方法,對所設計的微結構膜進行了仿真、加工和檢測,得到了與設計形貌基本一致的微結構形貌,然后搭建實驗測試系統對微結構膜的增亮效果進行測試。測試結果表明,所設計的微結構膜能有效地將Eyebox區域以外的投影光線調控到Eyebox觀看區域內,使該區域的平均亮度提高31.7%左右。該方法不僅提高了HUD的顯示亮度和系統光效,同時也減少了雜散光對駕駛人員的影響。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
