恒溫差熱式流量計分段PID控制的仿真與實驗
2021-09-29 01:45:56張夷非魏勇余厚全陳強劉國權賀飛
測井技術 2021年3期
關鍵詞:系統
張夷非,魏勇,余厚全,陳強,劉國權,賀飛
(1.長江大學電子信息學院,湖北荊州434023;2.中國石油集團測井有限公司生產測井中心,陜西西安710077)
0 引 言
傳統的渦輪流量計由于需要一定的啟動排量,無法滿足低產液油井流量檢測需求。熱式流量計無可動部件,對低速流動流量變化敏感,可靠性高,為低產液油井的流量檢測提供了一種可行的解決方案[1]。熱式流量計分為恒溫差熱式流量計和恒功率熱式流量計,恒溫差熱式流量計的響應時間優于恒功率熱式流量計,且對低流量流體具有更高的測量精度[2]。因此,研究恒溫差熱式流量計對解決低產液油井微小流量的檢測難題具有重要意義。
恒溫差熱式流量計的檢測原理為當流體的流量變化時,動態調整加熱器功率,保持傳感器之間溫度差穩定,建立加熱器功率隨流量變化的單調關系,將流體流量的檢測轉換為加熱功率的測量。因此,該檢測方法對恒溫差控制算法的要求較高。
本文介紹了恒溫差熱式流量計的測量原理,對實際流量檢測系統進行建模,針對建立的模型分別按增量式數字比例積分微分控制[3](PID控制)和分段增量式數字比例積分微分控制(分段PID控制)進行仿真與實驗研究。研究結果表明,相比PID控制,分段PID控制能夠減少恒溫差熱式流量計的響應時間,提高測量精度,更適合作為恒溫差熱式流量計的控制算法。
1 測量原理與仿真分析
1.1 測量原理
熱式流量計測量的物理基礎是熱擴散[4],其中,恒溫差熱式流量計測量時,將測溫探頭和測速探頭浸入被測流體中,測溫探頭放置在流體上游,測速探頭放置在流體下游,且與測溫探頭保持一定距離。其中,測速探頭由溫度傳感器和加熱器組合而成(見圖1)。
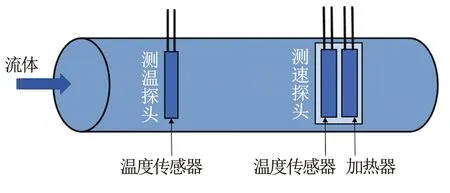
圖1 恒溫差熱式流量計示意圖
在測量過程中加熱器接通電源加熱。在熱平衡狀態下,根據傳熱學研究及Kramers[5]的換熱公式,加熱器功率和流體流速滿足關系[6]
P=(k1+k2v0.5)(Th-Te)
(1)
式中,P為加熱器功率,W;v為流體流速,m/s;Th為測速探頭測量的加熱器溫度,℃;Te為測溫探頭測量的環境溫度,℃;當加熱器結構和被測流體物性一定時,k1、k2均為常數。若保持測速探頭加熱器溫度Th與測溫探頭環境溫度Te之差ΔT不變,加熱器功率與流體流速的冪成正比,這種熱式流量測量方法稱為恒溫差法。
1.2 恒溫差控制模型分析
恒溫差控制模型見圖2。輸入端將溫度差ΔT轉換為溫差電壓Uc;根據控制器比較溫差電壓Uc與預設溫差電壓Us的電壓差ΔU,輸出合適的加熱電壓U;電加熱機構調節加熱功率P,最終形成反饋調節,使溫度差ΔT保持穩定,實現恒溫差的調節。
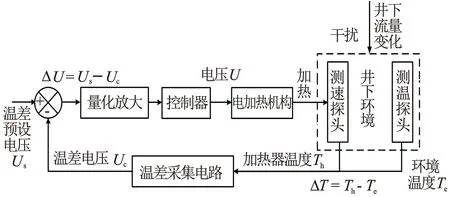
圖2 恒溫差控制模型
對于圖2中控制器與電加熱機構斷開的開環系統,系統實際輸入1個階躍加熱電壓信號Ui,即可得到其溫差的階躍電壓響應。在常溫常壓的近似封閉井筒環境內,將傳感器置于靜水中,分別施加恒定加熱階躍電壓信號Ui=1.0,1.5,…,3.0 V后的系統階躍響應見圖3。
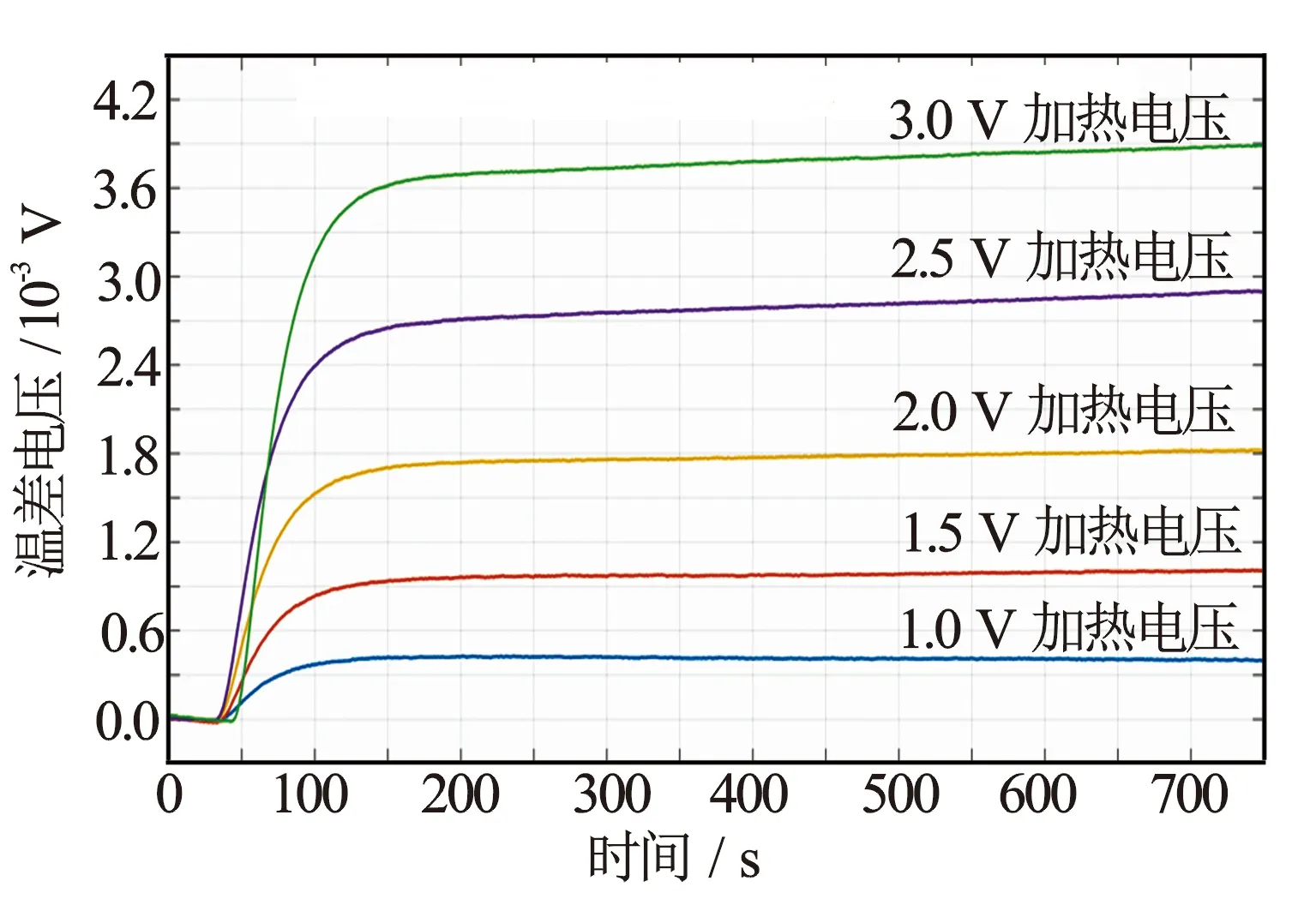
圖3 電加熱機構的階躍響應
圖3中曲線反映實際電加熱機構在不同階躍加熱電壓的激勵下,隨時間變化的溫差電壓。通過模擬仿真發現,用一階慣性+純滯后環節與該實際過程最佳擬合,其s域的傳遞函數為
(2)
式中,Kg為靜態增益系數,無量綱;Tp為時間常數,無量綱;Td為滯后時間,s。實際工程應用中,可以根據被控對象在階躍響應下的輸出響應曲線確定其近似傳遞函數。在MATLAB軟件中導入不同加熱電壓下的響應曲線,通過系統識別進行統計建模,得到傳遞函數參數Kg=0.000433、Tp=31.079、Td=9.1,電加熱機構的系統傳遞函數表示為
(3)
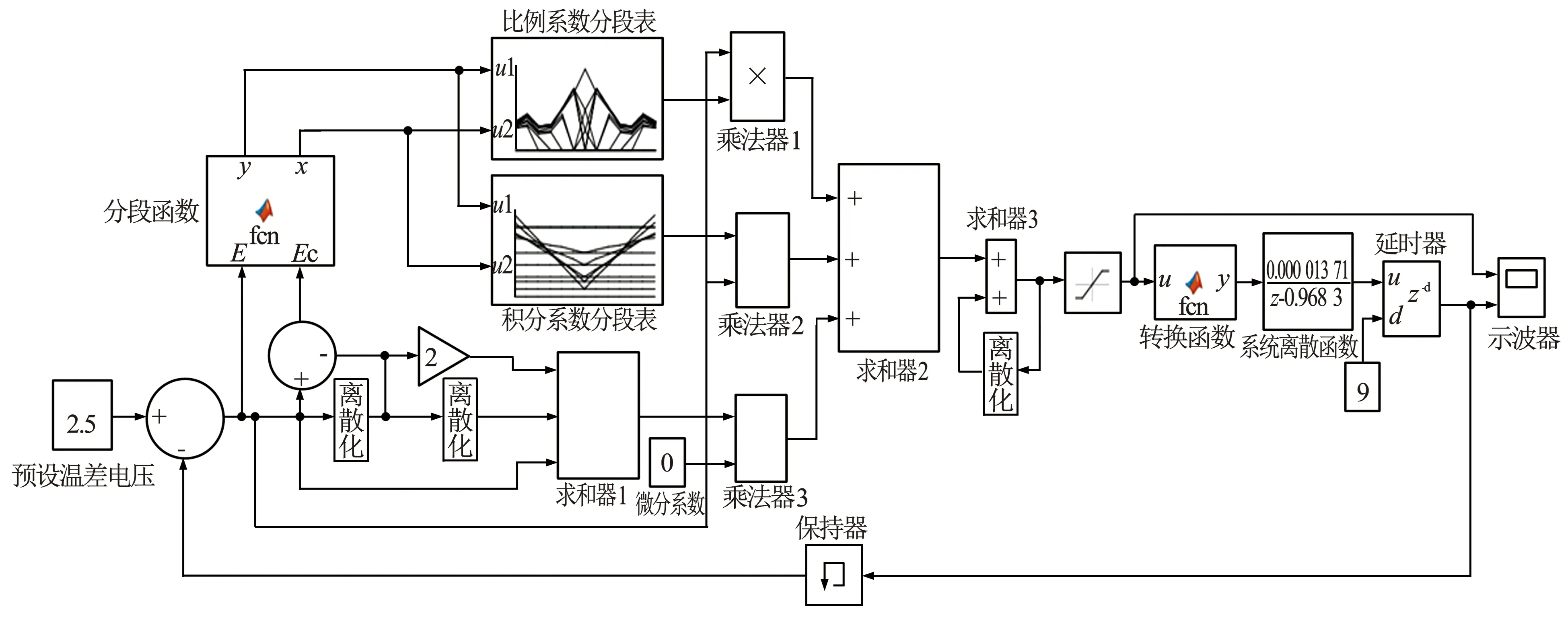
圖4 PID控制仿真系統
2 恒溫差控制算法設計
在恒溫差條件下,式(1)確定加熱器功率P與流體流速v的關系。為了根據加熱器的實時加熱功率來檢測當前流體流速,必須維持溫度差ΔT恒定,這對恒溫差控制算法提出了較高要求。
2.1 PID控制算法
溫度控制系統一般采用數字PID控制算法,其中增量式PID控制算法能減少存儲單元,避免輸出產生大幅度誤差,被廣泛應用于工業控制,其算式
ΔN=n(j)-n(j-1)=Kp[E(j)-E(j-1)]+
KiE(j)+Kd[E(j)-2E(j-1)+E(j-2)]
(4)
式中,j為采樣序號,j=1,2,…;ΔN為控制器2次輸出n(j)、n(j-1)的增量;E(j-2),E(j-1),E(j)分別為(j-2)、(j-1)和j時刻得到的系統偏差;Kp為比例系數,增大該系數可以加快系統的響應速度、降低穩態誤差,但過大會導致系統振蕩或發散;Ki為積分系數,增大該系數可以減小系統的調節時間,但過大會導致系統不穩定;Kd為微分系數,增大該系數可以抑制偏差變化,但過大會延長調節時間,降低抗干擾能力[7]。
2.2 分段PID控制算法
傳統PID控制算法理論成熟,結構簡單,但要求被控對象具有合適的數學模型。實際上許多控制對象無法用精確的數學模型描述,具有大時滯、非線性等特點,采用單一PID參數調節不容易達到理想的控制效果[8]。根據控制對象的實際情況以及偏差的大小,在不同的控制階段給定不同的PID調節參數,這樣既可以增加響應速度,超調量也不會太大,這就是分段PID的控制思想。
2.3 恒溫差控制算法仿真
為了研究PID控制算法及分段PID控制算法在靜水中的調整效果,利用Simulink軟件模塊進行恒溫差流量控制仿真。根據式(3),若系統采樣時間為1 s,則相應的數字離散系統傳遞函數為
(5)
根據傳遞函數建立的PID控制系統見圖4。該系統預設的溫差電壓為2.5 mV,信號延時設置為9 s,仿真時間設置為300 s。由于該恒溫差控制系統分辨率高,對外界擾動敏感,偏差變化加速度不具有參考性,故舍棄微分參數。常規PID控制參數可根據Ziegler-Nichols參數整定方法(Z-N法)確定比例系數Kp為0.68,積分系數Ki為0.03[9]。而分段PID控制算法采用不同的系統偏差E和系統偏差變化率Ec作為調整的輸入控制變量。
(1)如果E為正且Ec也為正,或者E為負且Ec也為負,表明存在偏差且偏差還在繼續加大。為了確保系統有較好的追蹤性能,Kp在|E|值最大和|Ec|值很小時取最大值,并隨著|E|的減小和|Ec|的增大而適當減小;Ki在|E|值最大和|Ec|值最大時取最大值,并隨著|E|的減小和|Ec|的減小而適當減小。
(2)如果E為正且Ec為負,或者E為負且Ec為正,表明盡管存在偏差,但偏差正在減小。隨著|E|值的增大和|Ec|的增大,Kp的取值減小,抑制變化的力度減弱;Ki在|Ec|較小且|E|值大時取較大值,并隨著|E|的減小和|Ec|的增大而減小,以便更好消除累積偏差。
比例系數Kp參數分段表見表1,積分系數Ki參數分段表見表2。表中按系統偏差E和偏差變化率Ec分為不同區間,給定了該區間參數參考值。
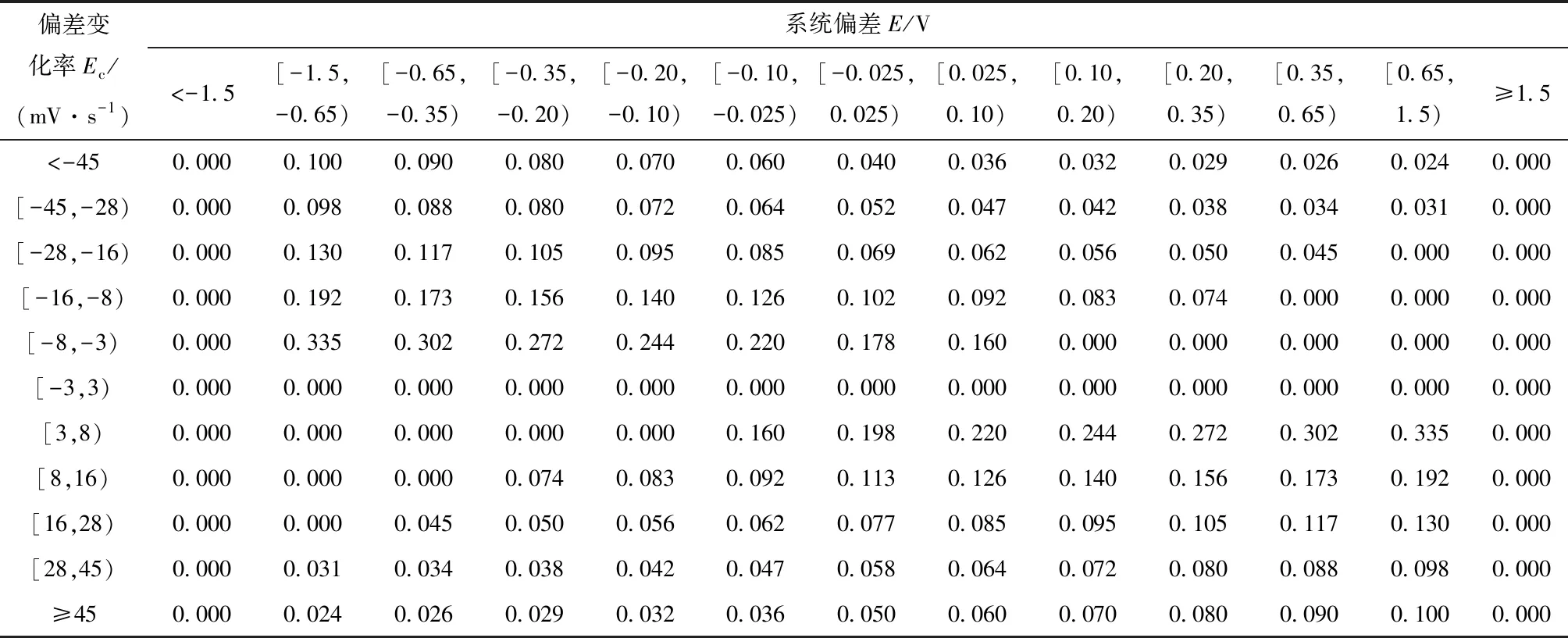
表1 比例系數Kp參數分段表
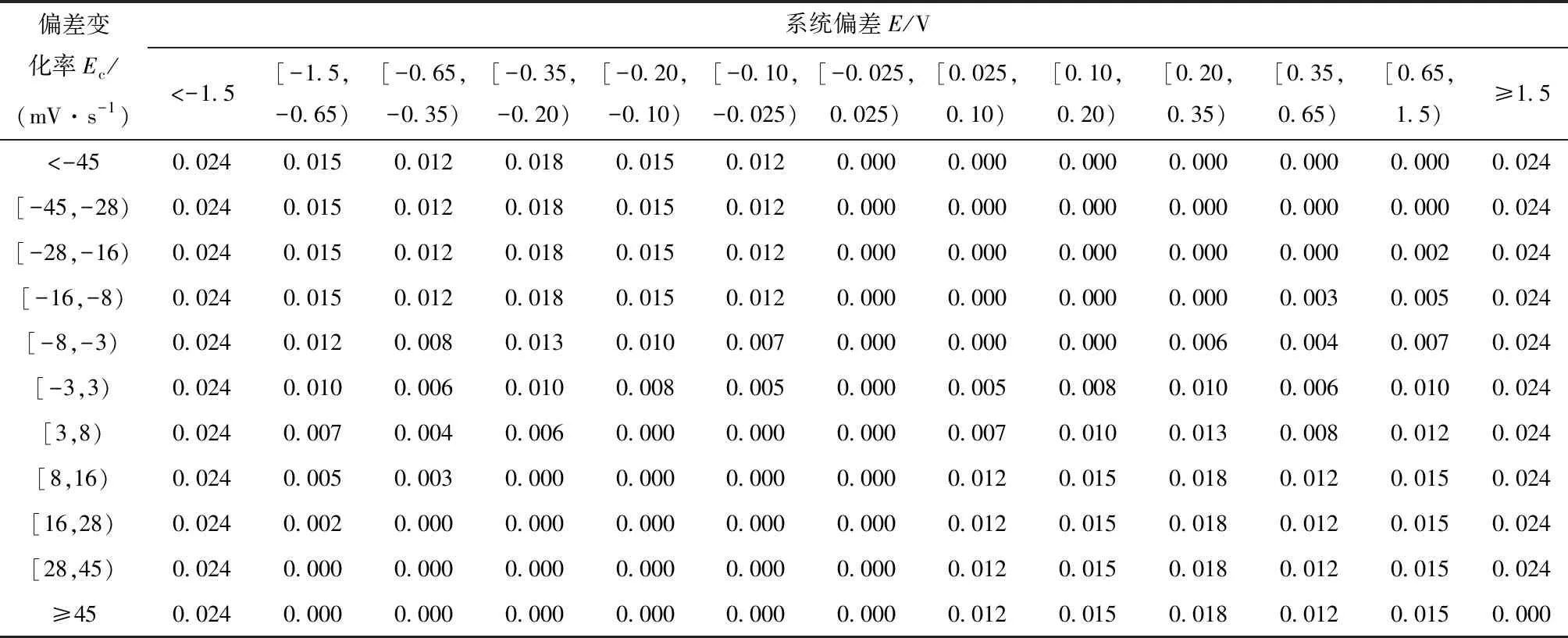
表2 積分系數Ki參數分段表

圖5 溫差電壓控制曲線對比
根據2種控制算法,基于MATLAB軟件仿真的恒溫差控制系統的溫差電壓變化見圖5。根據圖5中的2條曲線可以計算常規PID控制和分段PID控制的恒溫差系統動態性能指標(見表3)。通常來說,上升時間tr評價系統的響應速度,超調量σ評價系統阻尼程度,調節時間ts反映響應速度和阻尼程度綜合性指標[3]。由表3可見,分段PID控制無論是調節時間還是上升時間,均快于常規PID控制,超調量均不到0.5%。仿真結果表明,分段PID控制算法具有響應速度快、穩定性高的優點,在熱式質量流量計的恒溫差控制中具有實用價值。

表3 恒溫差系統動態性能指標
3 恒溫差流量檢測控制實驗
3.1 流量測試裝置
基于熱式流量計的檢測原理,設計并搭建了一套井下井筒流體模擬系統(見圖6),其中模型井內徑為200 mm。水泵抽出流體(水),經標準流量計計量后,從模型井底部流入井筒。當模型井中液面高于溢出孔時,流體在重力作用下流回水箱,完成循環。系統正常循環時,流體從下至上流經熱式流量計,根據水泵閥門的開合程度,流體流速會發生變化,并顯示在標準流量計上。因此,可根據流體流速和熱式流量計功率的關系來評價系統響應是否滿足需求。

圖6 井下井筒流體模擬系統
3.2 零流量測試實驗
將水箱注滿水,與測試環境等溫。將水泵開至最大流量,循環10 min后關泵。這時恒溫差流量計開始記錄零流量時的溫差電壓和加熱電壓的變化。為了減小外界干擾影響,對采集的數據進行10 s的平滑濾波處理,得到零流量溫差電壓和加熱功率曲線見圖7。
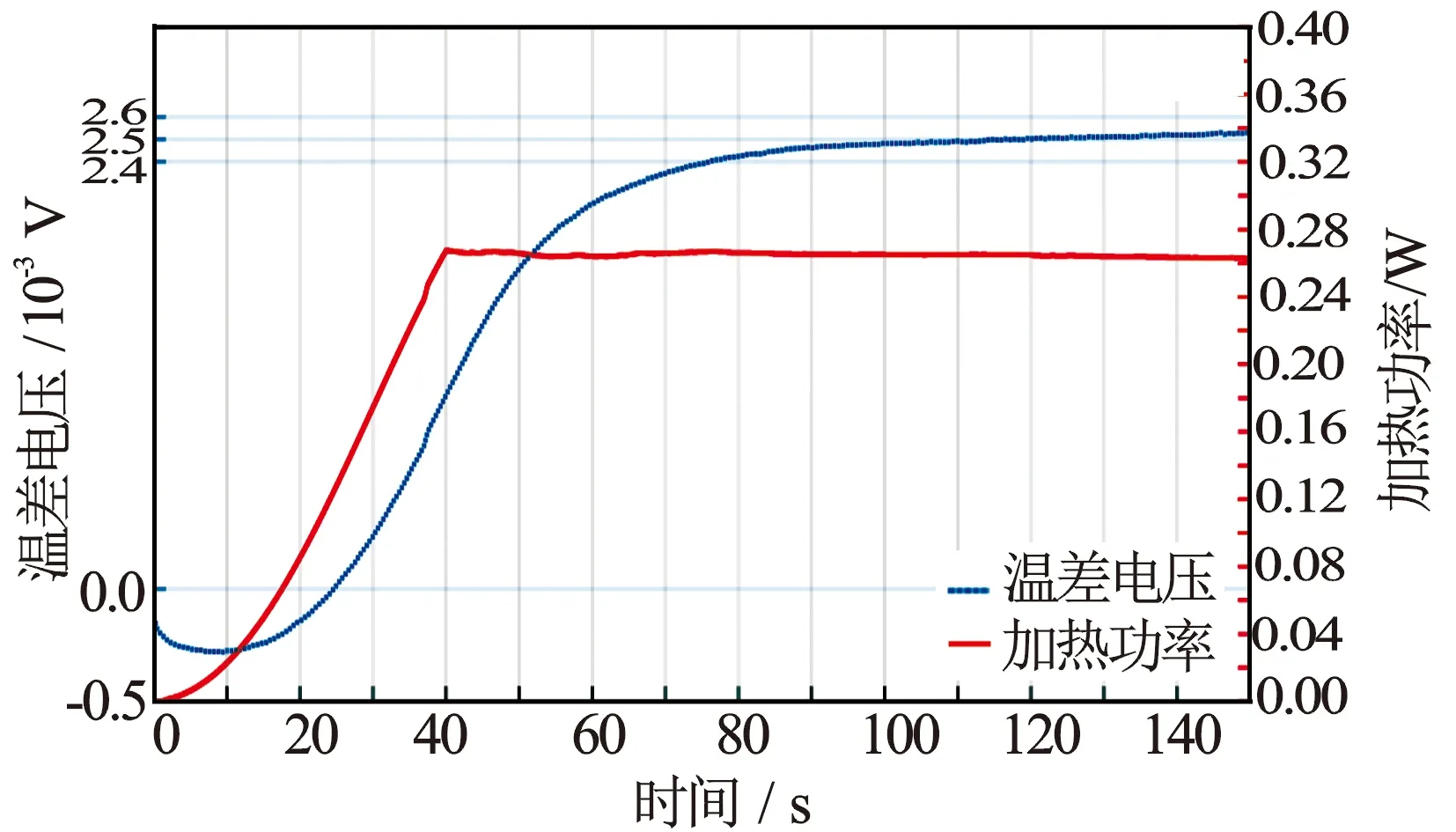
圖7 零流量溫差電壓和加熱功率曲線
實驗數據表明,在流體為全水、流速為0的情況下,上升時間tr約為60 s,超調量σ約為10%。與仿真結果對比,實測結果上升時間tr基本不變,超調量σ有所增大。
3.3 等梯度流量實驗
為了評價采用分段PID控制算法的恒溫差熱式流量計對不同流量的響應特性,根據標準流量計上的流量讀數,調整控制水泵,使進入井筒的流量分別為0.7、0.6、0.5、……、0 m3/h,每隔300 s調整一次流量,數據采樣率為1 s,預設維持的恒定溫差電壓為2.5 mV。實驗結果見圖8(a),加熱器功率隨流量變化分布曲線見圖8(b),并計算相應流量端加熱器的平均功率
(6)
式中,Ut為當前時刻采樣得到的加熱電壓值,V;R為加熱器電阻,約為22 Ω。實驗結果表明,在內徑為200 mm的井筒內采用恒溫差分段PID控制算法,可以在0~0.7 m3/h流量范圍內,清晰分辨0.1 m3/h的流量變化。
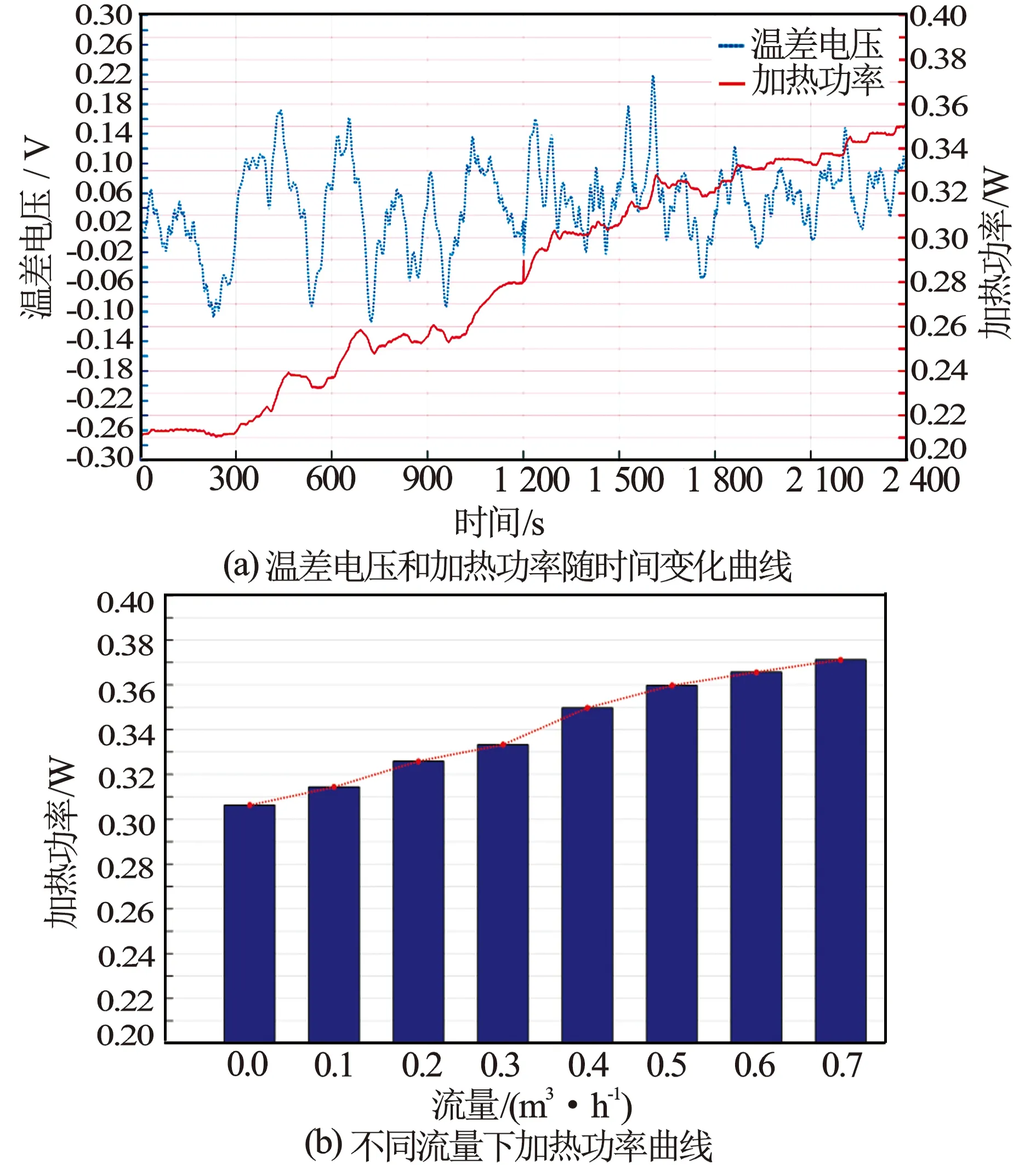
圖8 等梯度流量實驗數據
4 結 論
(1)由恒溫差熱式流量計的檢測原理,根據實際模型的測量數據系統建模結果表明,恒溫差熱式流量計實際模型近似電加熱機構,可用于井下微小液相的流量檢測。當儀器系統達到熱平衡狀態后,其加熱器輸出功率可反映當前被測流體流量。
(2)通過實際模型驗證了恒溫差控制算法,結果表明,分段PID算法更適合于恒溫差熱式流量計的控制算法,相較常規PID控制算法,分段PID控制算法能夠縮短儀器響應時間。
(3)實際模型井筒的流量實驗數據證實了分段PID控制算法在恒溫差熱式流量計控制中的可靠性,采用分段PID控制的恒溫差熱式流量計響應速度快,流量檢測分辨率高,滿足低產液井的流量檢測需求,為解決井下微小液相的流量檢測難題的實現提供了一種可行的技術手段。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32