適用于智能交通系統仿真平臺的微型集群機器人研究
2021-09-28 11:23:28陸祺靈
軟件導刊 2021年9期
周 娟,陸祺靈,劉 磊
(1.上海建橋學院 職業技術學院,上海 201306;2.上海理工大學管理學院,上海 200093)
0 引言
智能交通系統(Intelligent Transportation System,ITS)將先進的信息技術、通訊技術、傳感技術[1]、控制技術以及計算技術高效地集成在一起,建立出一個強大的、全方位的地面交通管理系統,滿足了現代交通運輸的需求。自動駕駛是智能交通發展的重要領域之一。隨著人工智能、移動網絡、大數據等技術的迅速發展,以自動駕駛為代表的新一代ITS 逐步成為解決交通問題的突破口[2],其相關研究也日益受到高校重視[3]。
從系統工程的角度來看,ITS 屬于開放式復雜巨系統[4]。近年來,基于“互聯網+”的智能交通方案成為現代城市交通規劃的重點[5],但構建這樣的交通系統用于實踐教學意味著巨額資金投入,如清華大學的汽車交通安全國家重點實驗室便是得到了國家“863”項目、科技攻關項目、國際合作項目等資助,才得以開展該領域系統化的研究與教學活動[6]。為降低科學研究與實驗教學成本,現有的ITS研究多集中在基于計算機視覺的目標檢測與分類方面,尤其是運動目標的建模[7]多是對ITS 進行虛擬仿真[8],對半實物交通仿真平臺的研究相對較少。目前只有少數研究機構在實驗室內搭建大型半實物交通仿真平臺對ITS 進行研究,如麻省理工大學建立了MITSIM 實驗室,武漢理工大學、軍事交通學院建立了半實物仿真平臺[9],如圖1 所示。

Fig.1 A hardware-in-the-loop simulation platform built by the Military Transportation Academy圖1 軍事交通學院建造的半實物仿真平臺
雖然已有平臺可以開展ITS 實驗,但具有仿真車輛設計不夠緊湊,需要占用較大實驗室面積,車輛充電、編程維護成本高,車輛系統定位、通信系統設計成本高等缺點,使得其在微觀層面上數據獲取步驟復雜,不利于ITS 的智能化數據處理。
集群機器人是指組建一群結構相同或類似的機器人,其可在已知環境中相互協調與合作,共同完成任務[10]。集群機器的設計靈感來自于自然界的自組織系統,如社會性昆蟲、魚群、鳥群等基于簡單交互規則的集群行為[11]。目前國內只有少數機構研究微型機器人集群,主要集中在分布式環境探測與協同物流搬運[11]等方面,適于實驗室研究的通用微型機器人系統還有所欠缺,根本原因在于硬件小型化的難題迄今尚未解決。
為此,本文設計一套通用微型集群機器人系統,模擬ITS 中可以自動避障的自動駕駛車輛[12],以實現系統微型化、低成本、簡維護、易制造的特性,大幅降低搭建與維護難度,以便在實驗室內進行ITS 模擬,改善目前智能交通領域科研與實踐教學的實際難題。
1 ITS 實驗室總體設計
圖2 為ITS 實驗平臺的總體設計。該系統長1m、寬1m、高2m,其中用于模擬道路交通環境的平臺高0.6m,安裝攝像頭和投影裝置的支架高2m,可容納約150 臺微型智能機器人。為方便初步測試,該系統采用環形邊界作為圓形軌道測試集群機器人長時間的自組織控制性能。
該系統中,微型機器人群用于模擬自動駕駛車輛集群,無線充電平臺模擬道路環境,攝像頭模擬衛星定位,投影儀進行虛擬標注與顯示,從而在整體上形成封閉的智能交通環境。攝像頭通過圖像處理將所有機器人的位置信息存儲于服務器,一方面通過無線路由器以WiFi 的形式為微型集群機器人提供定位服務,另一方面可用于交通數據分析。運行平臺底面鋪設有充電線圈陣列,充電控制系統內置于電氣控制柜,可不間斷地為機器人提供電力。

Fig.2 Intelligent transportation system experiment platform and its miniature swarm robot圖2 智能交通系統實驗平臺及其微型集群機器人
受限于攝像機的幀率,圖像處理模塊的循環周期為300ms。跟蹤軟件采用卡爾曼濾波技術,將位置信息發送給每個機器人,焦點機器人通過每個機器人的位置信息還原局部相對測量信息,具體如圖3 所示。測量信息為單體車輛相對于環境與鄰居的瞬時信息,包括相對于邊界的距離rw、相對于邊界的角度θw、相對于每個鄰居的距離dij、觀察鄰居的視角ψij和與鄰居的相對航向角φij。將這些狀態信息作為變量輸入到單體的交互模型中,在模型輸出與避障程序輸出的共同作用下,最終將新目標位置分解為機器人電機驅動信息,通過WiFi 發送給每個機器人。
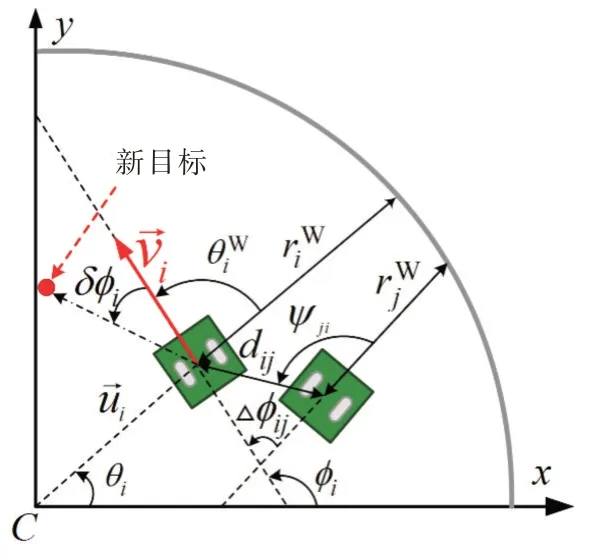
Fig.3 Sensing and control variables between the robot relative environment and the robots圖3 機器人相對環境與機器人之間的傳感和控制變量
機器人控制形式屬于硬件回路仿真,其結構如圖4 所示。仿真回路包含3 個部分,分別為用于檢測本地環境的頂部攝像頭傳感器、用于計算決策的處理器和用于執行決策的執行器。雖然機器人可以完全獨立地進行數據收集與處理,但編程是一項費時的操作,每個實驗條件都要重新編寫、編譯和燒錄。經過分析,本文決定使用外部計算機為每個機器人進行分布式決策計算,模擬ITS 系統的自治性與分布式控制條件。硬件回路仿真將機器人硬件集成到計算機軟件中,不同于傳統的軟件仿真,硬件回路仿真集成了硬件約束,可以提供更加真實的仿真效果。
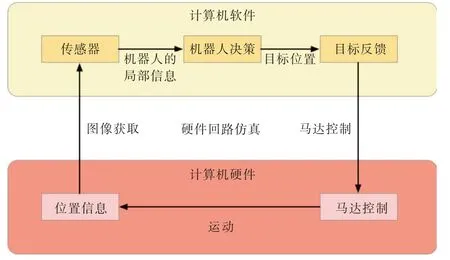
Fig.4 Hardware loop simulation圖4 硬件回路仿真
2 微型集群機器人設計
2.1 結構設計
微型機器人結構如圖5 所示,尺寸為長40mm×寬40mm ×高66mm。電機?無級調速,機身配備WiFi 收發裝置⑧,可通過TCP/IP 網絡協議獲取服務器上的位置信息、運行腳本,也可上傳自身狀態。機器人裝載兩臺微控制器,一臺32 位ARM 微控制器位于中間電路板?,用于運行自動駕駛車輛控制策略;另一臺8 位微控制器位于上電路板①,用于執行紅外雷達②、③的近程通訊協議,該協議已獲得國家發明專利[13],能夠在160mm 范圍內與其他微型機器人同時進行數據通訊與相對定位,通過該裝置可模擬車車通訊以及車載雷達。機器人底部裝有無線充電接收線圈?,通過鋰電池充電管理系統能實現同時工作與充電,從而保證了智能體的不間斷實驗。上電路板①上側焊接有1 個3 色LED 燈?,用于顯示機器人的狀態。液晶顯示器?用于具體參數顯示,3 軸磁傳感器?用于姿態測量,中間電路板?上側為大容量3.7V 方形聚合物鋰離子電池?,電池上方粘有一球面反光鏡⑤,用于增強紅外通訊距離。上電路板①與中間電路板?之間采用4 根銅棒④進行電路連接,分別為電源正極、電源地、串行發送和串行接收,該串行通訊可使主控ARM 芯片與上電路板的傳感控制8 位微控制芯片進行通訊連接。
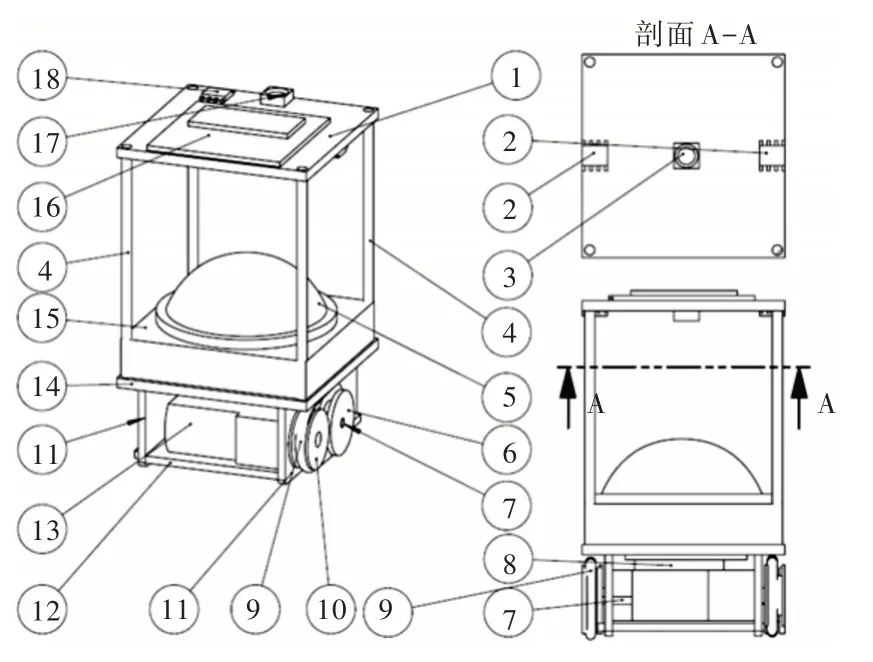
Fig.5 Micro-robot structure圖5 微型機器人結構
2.2 特色功能設計
用于ITS 實驗的微型機器人數量龐大,采用人工充電與人工燒寫實驗程序的方式維護成本高昂。針對此問題,本文在機器人上配備大容量聚合物鋰電池。為使機器人能正常連續工作8h,還安裝了大功率無線充電電路,使其在短時間內充滿電力。設計WiFi 收發程序,使用無線網絡通訊的方式批量更新底層所有機器人的程序,以提高實驗效率。
機器人上電路板①下方正中焊接有一個紅外發射管③和對稱放置的2 枚紅外接收管②,上電路板①的8 位微控制器通過調制紅外信號向外發送機器人的身份信息,調制紅外光經過球面反光鏡⑤反射,被其他機器人的兩側紅外接收管②所接收。接收機器人的8 位控制器解調信號能獲取源機器人的身份信息,同時該控制器還可分別測量兩側接收管的信號強度,由此推算信號源相對于兩側傳感器的距離,利用三角測量法[14]反算出信號源的方位與距離。該技術可低成本地實現可靠的車輛間短距離通信,又同時仿真了車載雷達[13]。
2.3 程序設計
微型集群機器人常用的處理器包括單片機、DSP、ARM等。每種控制器都有其獨有特點,其中單片機價格低廉,適用于批量生產,但性能偏低;DSP 計算高速,但更適用于專業的數字信號處理;ARM 芯片可以承載操作系統,適合多任務、并發運行。通過反復衡量性能、成本、功耗等因素,微型機器人最終選定ARM 系列芯片,程序框架如圖6所示。ARM 芯片的程序外層是一個BootLoader 外殼,其在腳本運行前初始化硬件設備,建立內存空間映射,將系統的軟硬件環境配置到一個合適的狀態,為最終運行實驗腳本程序作好準備。

Fig.6 Micro-robot programming framework圖6 微型機器人程序框架
實驗腳本程序包括協同腳本、導航腳本、生存腳本3 個部分。機器人的協同程序稱為協同腳本,用于實驗機器人之間的安全交互與協同運動。該腳本可以通過紅外協議和WiFi 通道與周圍仿真車輛(機器人)共享信息,協商實現智能車隊的協同控制。機器人的導航程序稱為導航腳本,可使用運輸路徑最優選擇模型[15]規劃自動駕駛車輛從初始點到目標點的路徑。機器人的運動控制程序稱為生存腳本,其使用PID 控制器實現對模擬無人駕駛汽車的行駛控制[16],負責機器人的安全移動。生存腳本聽從導航腳本與協同腳本的命令,根據WiFi 廣播的機器人位置與MP9250 姿態傳感器測量的朝向,使用卡爾曼濾波器[17]計算出機器人車輪的加減速與轉向控制。可以根據不同實驗目的開發腳本,更換機器人運行策略,輔助教學目標實現不同的智能交通協同策略。ITS 實驗教學的主要目標為實現自動駕駛車輛的巡航、跟隨、換道,以及自動駕駛車隊的組合與拆分等任務,因此協同腳本與生存腳本的算法實驗是其教學重點。
2.4 實驗與測試
微型機器人樣機如圖2 所示。機器人底部使用2 盎司銅印刷電路板繪制的充電線圈,與銅線圈相比,其成本低、標準化程度高、易于批量生產。機器人電路可使用表面帖裝技術(SMT)在工廠中批量制造,手動組裝一臺機器人僅需約10min,批量生產十分便捷。無線充電發射電路線圈采用印刷電路板形式,可方便地粘貼在實驗平臺底面,使機器人邊運行邊充電。
對該機器人的性能進行測試,發現其在滿電狀態下可連續中速移動超過10h,2h 內即可快速充電完畢。兩個機器人之間在白色桌面上可實現160mm 范圍的有效通訊定位,角度定位精度為±3°,距離定位精度為±5mm,多機器人紅外通訊可通過協議[10]控制而互不影響。WiFi 通訊程序下載速度可達200kb/s。
實驗程序腳本使用標準C 語言,采用KEIL C 編譯工具開發腳本HEX 文件[18]。學生由于有先修課的基礎,平臺腳本編程掌握迅速,實驗效果較好。運行數據可使用數據挖掘技術進行分析,為后續復雜系統的數據挖掘課程提供了大數據支撐。
通過對試制樣機的仿真測試可知,本文機器人符合以下條件:①微型化,保證了在有限實驗空間內形成規模效應;②低成本,可降低大規模機器人制造費用;③簡維護,便于大規模機器人充電、燒寫程序等;④易制造,保證大規模機器人的快速生產。樣機指標符合設計預期,且制造方便、成本低廉、維護簡單。
3 智能交通系統架構
ITS 實驗系統主要包括微型機器人集群、服務器系統以及客戶機3 個部分,具體如圖7 所示。
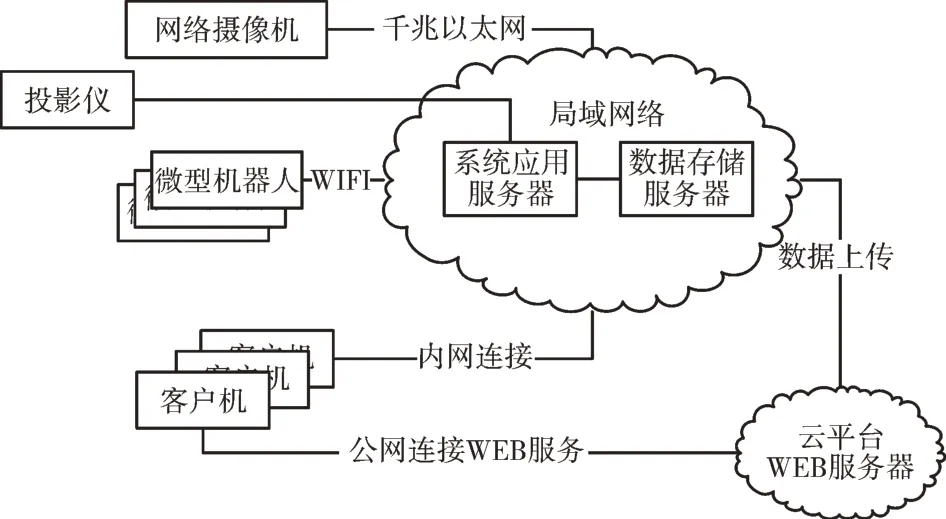
Fig.7 Architecture of ITS laboratory protocol system圖7 ITS 實驗室方案系統架構
網絡攝像機接入局域網中的系統應用服務器,在該服務器中運行圖像處理算法[19],用于定位圖2 環境中各機器人的位置,并開放API 接口,通過WiFi 網絡向微型機器人單體提供實時定位服務。與此同時,該服務器還將定位數據通過內部網絡存儲于數據存儲服務器,用于實驗完成后對整體交通狀況進行分析。投影儀連接系統應用服務器,用于向無線充電平臺投影交通信號,例如路口交通信號燈、禁止通行標志等,該環境信息也將一并存儲于數據存儲服務器中,用于實驗后分析。機器人的實時運行數據,如機器人身份信息、機器人動力學數據、機器人傳感數據等也可通過WiFi 網絡上傳至數據存儲服務器。
內網客戶機可直接訪問數據存儲服務器獲取實驗數據,以進行本地顯示或實驗數據分析,也可編寫腳本上傳至應用服務器。這些腳本可下載至底層微型集群機器人中,腳本的版本控制信息存儲在數據存儲服務器中。服務器數據也可上傳至公網云平臺,在云平臺上部署WEB 服務。客戶機則可使用瀏覽器操控仿真平臺,監控實驗平臺腳本以及運行效果,還可根據云平臺數據進行深度學習與預測分析[20]。
4 簡易智能車隊模擬實驗與結果分析
為測試平臺仿真ITS 的有效性,初步驗證智能車隊集群運動的自組織控制性能,在如圖2 所示的圓形邊界軌道中,保持車隊靠近道路邊界而又不發生碰撞,進行集群運輸。在每個單體的決策時刻,觀測圖3 所示的鄰居與環境信息,機器人自主控制自身方向變化,并減速保持一定的安全距離。
在n+1 時刻,單體i的位置向量和朝向角可表示為如下離散決策模型:
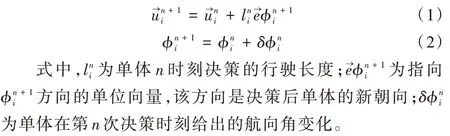
決策長度需根據前進方向上的車輛與環境距離適當縮減,而決策時的航向角變化是環境與鄰居共同作用的結果,表示為:

式中,γw為邊界作用力強度,lw為邊界作用范圍。
鄰居影響單體轉向的模型δφij需要保證ITS 車隊的匯聚性,可將轉向模型分解為吸引與對齊兩個方面,其值取決于機器人之間的相對信息dij,ψij,Δφij,表示為:

式中,dij為兩智能體之間的距離,ψij為焦點智能體i觀察鄰居j的視角;Δφij=Δφj-Δφi,為機器人i與機器人j的相對航向角。
吸引力函數可以解析為:
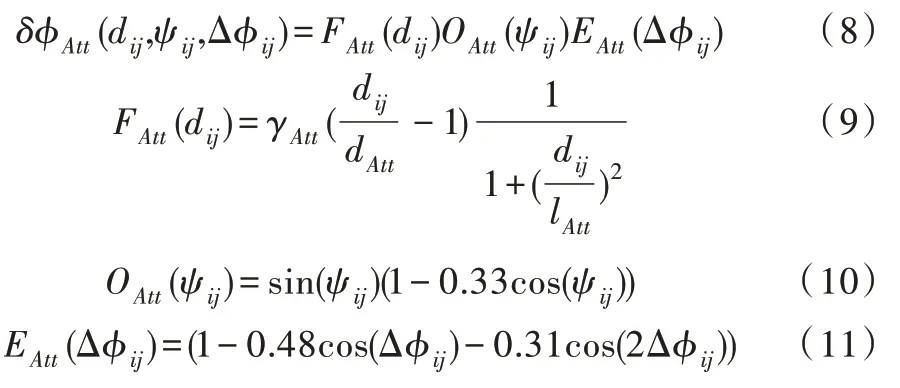
式中,dAtt用于平衡短距離排斥作用與長距離吸引作用,避免過于凝聚導致的碰撞;γAtt為吸引作用力的強度,lAtt為引力影響的范圍。同樣可以假設對齊力函數為:
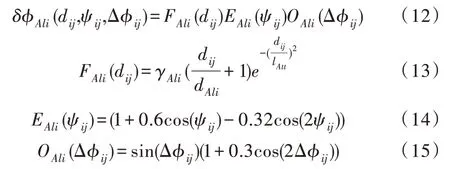
式中,dAli用以避免因對齊作用力而導致碰撞,γAli為對齊作用強度,lAli為對齊作用影響范圍。
仿真實驗具體參數如表1所示。
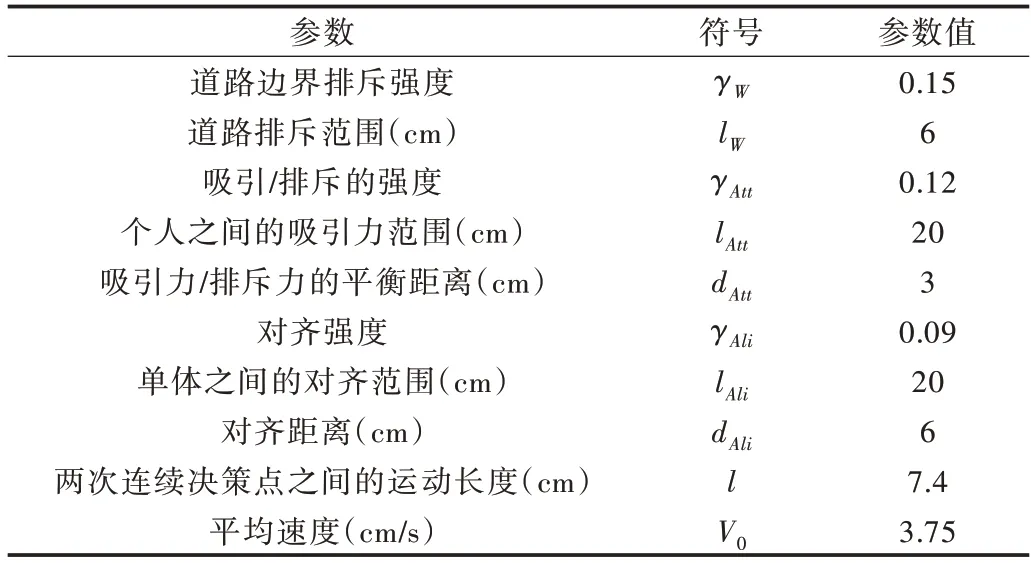
Table 1 Related parameters of robot simulation experiment表1 機器人仿真實驗相關參數
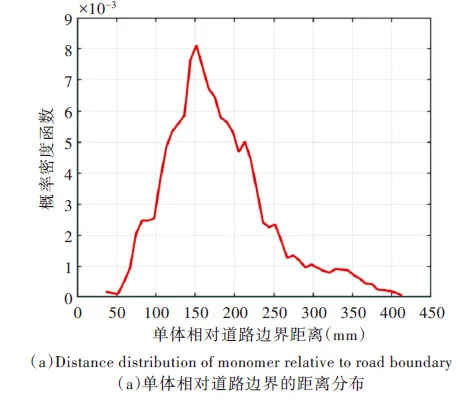
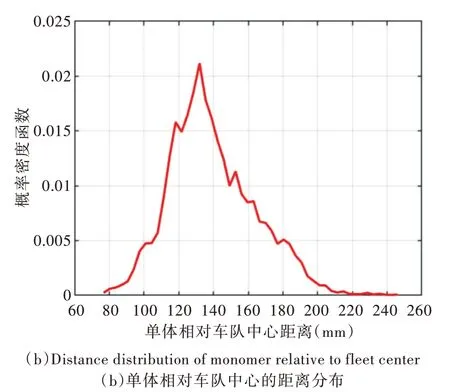
Fig.8 Results of the ITS simulation圖8 ITS 仿真結果
對上述自組織控制過程進行由5 個機器人組成的車隊模擬實驗,獲取了ITS 仿真數據。數據統計了車隊集群運行過程中,單體相對道路邊界以及車隊中心的距離分布情況,具體如圖8 所示。仿真數據表明,本文設計的實驗室微型機器人平臺可以保持集群在靠近道路的位置上連續運動,并保持車隊的匯聚性。
5 結論
本文使用自主研發的微型集群機器人替代自動交通運輸系統,提出一種實驗室級ITS 解決方案,有助于ITS 實驗室的標準化,為高校教學、科研提供了便捷實用的實驗平臺,是教學改革的一次有益嘗試。本方案的不足之處在于:智能車隊實驗針對的是初步模擬簡化的車隊交通,且集群機器人的設計只適用于在二維空間中探索,不適用于三維空間。后續會考慮改進集群機器人的傳感機構,使其能夠在三維空間中運行,以便進行更復雜的交通環境模擬。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
發明與創新(2016年38期)2016-08-22 03:02:52
