高速精密沖床肘接式執(zhí)行機(jī)構(gòu)的動力學(xué)分析
2021-09-26 01:14:45張云獻(xiàn)
內(nèi)燃機(jī)與配件 2021年16期
張云獻(xiàn)

摘要:本文圍繞高速沖床肘接式執(zhí)行機(jī)構(gòu)的結(jié)構(gòu)優(yōu)化和動態(tài)性能等方面,進(jìn)行了肘接式執(zhí)行機(jī)構(gòu)的動力學(xué)分析。把肘接式執(zhí)行機(jī)構(gòu)作為傳動系統(tǒng)的高速精密沖床三維模型導(dǎo)入Recurdyn,根據(jù)裝配要求為其添加約束和工作載荷驅(qū)動載荷再進(jìn)行仿真,通過結(jié)果后處理得到肘接式執(zhí)行機(jī)構(gòu)中關(guān)鍵桿上力的變化曲線,通過與Matlab中得到的力的曲線相對比,驗(yàn)證了設(shè)計的合理性。
關(guān)鍵詞:高速精密沖床;多體動力學(xué);仿真分析
中圖分類號:TG385.1? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)16-0040-02
0? 引言
隨著沖壓工藝的發(fā)展,加上傳統(tǒng)沖床的先天缺陷制約了沖壓工藝的進(jìn)步,再有其生產(chǎn)效率不高,嚴(yán)重的影響其發(fā)展[1]。為了滿足高速發(fā)展的航空航天行業(yè)、電子等加工制造行業(yè)對板材沖壓成型、拉伸的需求,通過改變執(zhí)行機(jī)構(gòu)的形式來提升機(jī)械式?jīng)_床的工作性能[2]。通過運(yùn)動學(xué)、動力學(xué)等分析結(jié)合優(yōu)化設(shè)計得到更加合理的執(zhí)行機(jī)構(gòu),這對機(jī)械沖床的性能和提高市場競爭力具有很重要的意義[3]。
1? 高速精密沖床肘接式執(zhí)行機(jī)構(gòu)多體動力學(xué)模型的建立
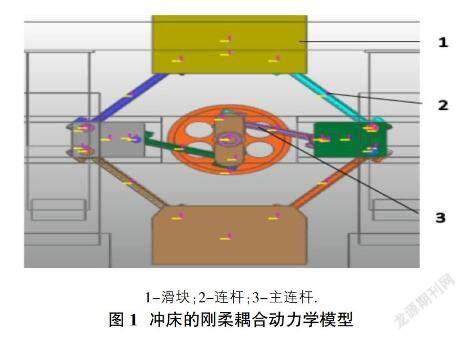
構(gòu)成高速精密沖床的零部件成百上千,但對沖床建立三維模型時,只需要簡化模型。依據(jù)主要的沖床零部件和沖床模型的拓?fù)浣Y(jié)構(gòu)[4]和間隙碰撞和柔性多體動力學(xué)理論基礎(chǔ)[5]建立沖床的剛?cè)狁詈蟿恿W(xué)模型。建立的沖床剛?cè)狁詈蟿恿W(xué)模型如圖1所示。
2? 肘接式執(zhí)行機(jī)構(gòu)連桿受力分析與截面積設(shè)計
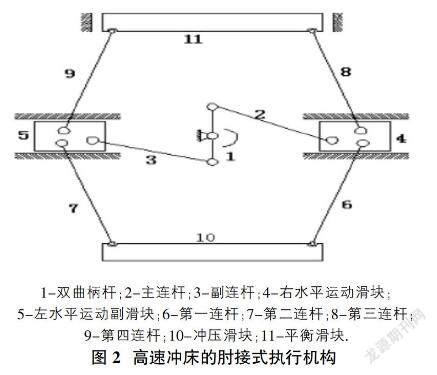
由圖2已經(jīng)得到機(jī)構(gòu)各構(gòu)件與曲柄的運(yùn)動關(guān)系,根據(jù)達(dá)朗貝爾原理[6],對連桿8進(jìn)行受力分析,如圖3所示。
已知條件:滑塊的速度V,搖桿8的加速度,桿的相對速度。
所求量:F2、F3、F4、S。
根據(jù)達(dá)朗貝爾定理,可得下列方程(1):
(1)
相對于機(jī)件受到的載荷來說,構(gòu)件自身的重量很小,因此可以忽略不計,同時為了在Matlab計算方便,在建模時忽略該執(zhí)行機(jī)構(gòu)的重力。
為了確保搖桿正常工作,所以取最大的應(yīng)力值2.43×106N,得到最小的設(shè)計截面面積約為2900mm2。
3? 肘接式執(zhí)行機(jī)構(gòu)在Recurdyn中的動力學(xué)仿真
由圖2確定的高速沖床的肘接式執(zhí)行機(jī)構(gòu)的原理圖,結(jié)合執(zhí)行機(jī)構(gòu)部分尺寸,通過三維制圖軟件CATIA,建立以肘接式執(zhí)行機(jī)構(gòu)為傳動系統(tǒng)的沖床模型,然后把所建模型導(dǎo)入到多體動力學(xué)軟件Recurdyn,添加約束,如圖4。
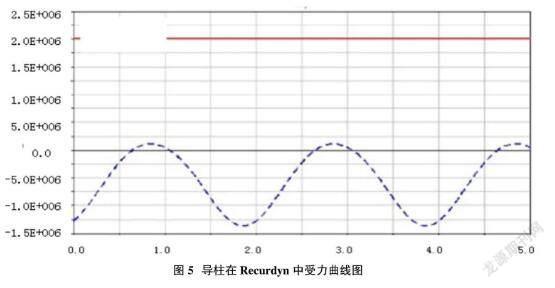
在Recurdyn中,對導(dǎo)入的肘接式執(zhí)行機(jī)構(gòu)的沖床模型添加約束和載荷,給曲軸添加驅(qū)動載荷,然后對該物理樣機(jī)進(jìn)行仿真,通過結(jié)果后處理得到的分析結(jié)果如圖5。
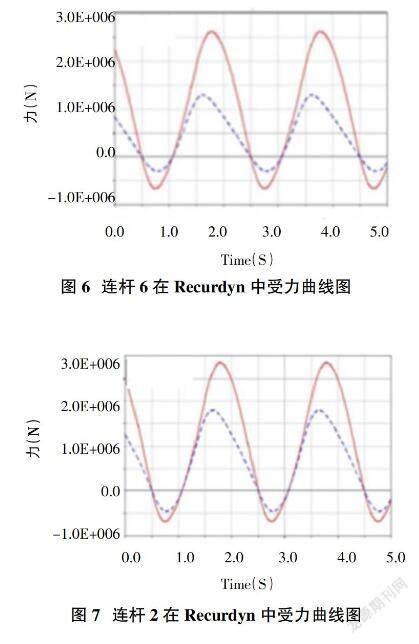
根據(jù)圖6、圖7可知:紅色實(shí)線JOINT-9-MEA-1是連桿在Y方向上受的力F1,藍(lán)色虛線JOINT-9-MEA-3較水平的是搖桿在X方向上所受的力F2。由于連桿上承受的最大載荷2.6E+006N沒有超出前面Matlab中的力,因此驗(yàn)證了前面設(shè)計連桿的截面積2900mm2是合理的。
4? 結(jié)論
建立了高速精密沖床肘接式執(zhí)行機(jī)構(gòu)多體動力學(xué)模型,應(yīng)用動力學(xué)理論仿真試驗(yàn)了在實(shí)際工況下執(zhí)行機(jī)構(gòu)的動態(tài)特性,此模型真實(shí)的展示出了高速精密沖床肘接式執(zhí)行機(jī)構(gòu)各零部件可視化動態(tài)參數(shù),通過與Matlab中得到的力的曲線相對比,驗(yàn)證了設(shè)計的合理性,為強(qiáng)度、疲勞分析設(shè)計提供了科學(xué)依據(jù)。
參考文獻(xiàn):
[1]劉川,宋四全,李勇.國內(nèi)沖壓自動化線成套技術(shù)及裝備供應(yīng)能力研究[J].機(jī)器人技術(shù)與應(yīng)用,2004(3):8-12.
[2]宋四全.金屬板材成形設(shè)備行業(yè)的現(xiàn)狀和發(fā)展(下)[J].金屬加工:熱加工,2005(4):70-73.
[3]周秋林.分析航空電器微小零件的制造特點(diǎn)[J].電子制作,2013(13):68.
[4]王春生.高速精密自動化:淺談國內(nèi)外高速精密沖床的現(xiàn)狀與發(fā)展[J].鍛造與沖壓,2008(7):21-22.
[5]焦曉娟,張湝渭,彭斌彬.RecurDyn多體系統(tǒng)優(yōu)化仿真技術(shù)[M].北京:清華大學(xué)出版社,2010.
[6]鹿新建,柯尊芒,朱思洪,等.多連桿高速沖床滑塊運(yùn)動曲線研究[J].鍛壓技術(shù),2010,35(4):90-94.