拖拉機(jī)液壓與電動2種自動駕駛方式
2021-09-26 02:47:46高帥鐘興高菊玲丁帥
江蘇農(nóng)業(yè)科學(xué) 2021年17期
高帥 鐘興 高菊玲 丁帥

摘要:對拖拉機(jī)自動駕駛的基本組成及路徑跟蹤原理進(jìn)行分析,建立了拖拉機(jī)的運(yùn)動學(xué)模型。在東方紅954拖拉機(jī)上加裝液壓轉(zhuǎn)向和電動方向盤自動駕駛系統(tǒng),對2種轉(zhuǎn)向方式的控制系統(tǒng)性能、直線度性能和入線數(shù)據(jù)進(jìn)行田間試驗研究。現(xiàn)場試驗表明,電動方向盤自動駕駛方式的動態(tài)性能指標(biāo)高于液壓轉(zhuǎn)向自動駕駛方式,穩(wěn)態(tài)誤差略低于液壓轉(zhuǎn)向自動駕駛方式,入線米數(shù)多數(shù)情況下少于液壓轉(zhuǎn)向自動駕駛方式,直線度的標(biāo)準(zhǔn)差比液壓轉(zhuǎn)向自動駕駛方式低0.55 cm。可見在相同情況下,電動方向盤自動駕駛方式路徑跟蹤效果和穩(wěn)定性方面略優(yōu)于液壓轉(zhuǎn)向自動駕駛方式。
關(guān)鍵詞:液壓;電動;自動駕駛;路徑跟蹤;直線度
中圖分類號:S219?? 文獻(xiàn)標(biāo)志碼: A
文章編號:1002-1302(2021)17-0188-05
收稿日期:2021-02-03
基金項目:江蘇農(nóng)林職業(yè)技術(shù)學(xué)院科技項目(編號:2019kj035)。
作者簡介:高 帥(1988—),男,江蘇新沂人,碩士,工程師,主要從事智能農(nóng)機(jī)裝備研究。E-mail:gaoshuai23@126.com。
通信作者:鐘 興,碩士,副教授,主要從事農(nóng)業(yè)機(jī)械設(shè)計、制造及自動化研究。E-mail:light200888@163.com。
隨著現(xiàn)代科技的不斷發(fā)展,現(xiàn)代農(nóng)業(yè)正朝著自動化、智能化、信息化的精準(zhǔn)農(nóng)業(yè)方向發(fā)展[1]。美國[2]、日本[3]、德國[4]等依次提出了精準(zhǔn)農(nóng)業(yè)的發(fā)展戰(zhàn)略方針,“中國制造2025”也致力于發(fā)展智能農(nóng)業(yè)裝備,推進(jìn)“互聯(lián)網(wǎng)+農(nóng)機(jī)”作業(yè)模式,開展農(nóng)機(jī)自動駕駛的相關(guān)技術(shù)研究已經(jīng)成為一種趨勢[5]。
自動駕駛農(nóng)機(jī)是精準(zhǔn)農(nóng)業(yè)生產(chǎn)作業(yè)的重要裝備,是精準(zhǔn)農(nóng)業(yè)中最為重要的一環(huán),通過自動控制替代人力,大幅提高農(nóng)機(jī)作業(yè)效率[6]。自動駕駛農(nóng)機(jī)技術(shù)是利用北斗或GPS等衛(wèi)星定位系統(tǒng)為主要技術(shù),通過農(nóng)機(jī)控制器和導(dǎo)航系統(tǒng)來自動控制農(nóng)機(jī),使農(nóng)機(jī)按照用戶定義的路徑行走[7-9],具有自動駕駛的智能化農(nóng)機(jī)已發(fā)展成為現(xiàn)代農(nóng)業(yè)裝備技術(shù)的新潮流,是近幾年來國際上推動農(nóng)業(yè)科學(xué)技術(shù)研究的重要熱點之一[10]。隨著農(nóng)機(jī)自動駕駛技術(shù)的快速發(fā)展,目前市場上出現(xiàn)了2種自動駕駛方式,分別是通過電動方向盤驅(qū)動轉(zhuǎn)向輪按照規(guī)劃好的路徑行駛的電動方向盤自動駕駛方式,以及通過電液比例閥驅(qū)動轉(zhuǎn)向輪的液壓轉(zhuǎn)向自動駕駛方式[11]。
對于這2種自動駕駛方式,行業(yè)內(nèi)的看法不盡相同,各國的學(xué)者也分別對液壓轉(zhuǎn)向[12-15]和電動方向盤[16-20]2種自動駕駛方式進(jìn)行了研究,實現(xiàn)了農(nóng)機(jī)的自動轉(zhuǎn)向。但是目前液壓與電動2種自動駕駛方式的路徑跟蹤對比分析研究比較少,如唐天石從技術(shù)層面、市場表現(xiàn)和歷史回顧方面分析了兩者的優(yōu)劣勢[21];李世超等針對不同電機(jī)的拖拉機(jī)自動導(dǎo)航轉(zhuǎn)向控制系統(tǒng)進(jìn)行了性能對比[22]。這些研究都對本研究有借鑒意義,本研究在前期工作的基礎(chǔ)上,對拖拉機(jī)自動駕駛的組成及路徑跟蹤原理進(jìn)行探討,分析液壓和電動2種拖拉機(jī)自動駕駛方式的區(qū)別,最后搭建試驗平臺,進(jìn)行兩者的田間試驗研究,試驗測試2種方式的控制系統(tǒng)性能、直線度性能和入線度數(shù)據(jù)。
1 拖拉機(jī)自動駕駛
1.1 拖拉機(jī)自動駕駛的組成
如圖1所示,拖拉機(jī)自動駕駛系統(tǒng)主要由3個部分組成,分別是拖拉機(jī)人機(jī)交互系統(tǒng)、拖拉機(jī)控制器+天線系統(tǒng)、拖拉機(jī)轉(zhuǎn)向+角度傳感器系統(tǒng)。拖拉機(jī)人機(jī)交互系統(tǒng)是拖拉機(jī)駕駛員與交互控制系統(tǒng)交互的關(guān)鍵組件,主要包括各種人機(jī)交互界面、顯示器等,可以規(guī)劃拖拉機(jī)執(zhí)行路徑、設(shè)置相關(guān)參數(shù),同時可以實時地查看拖拉機(jī)路徑的航向、作業(yè)的場地面積等。拖拉機(jī)控制器+天線系統(tǒng)主要包括控制器、基準(zhǔn)站、衛(wèi)星天線、車載信號接收機(jī)等,該系統(tǒng)高度集成化,可以完成拖拉機(jī)的衛(wèi)星定位、決策和遠(yuǎn)程控制,能夠?qū)崟r準(zhǔn)確地定位拖拉機(jī)的位置與姿態(tài),計算出拖拉機(jī)實際行駛路徑與規(guī)劃路徑之間的偏差,并進(jìn)行最優(yōu)求解,規(guī)劃最優(yōu)路徑,并將拖拉機(jī)實時數(shù)據(jù)反饋給拖拉機(jī)執(zhí)行機(jī)構(gòu),使拖拉機(jī)始終準(zhǔn)確地按照規(guī)定航線進(jìn)行行駛[23]。拖拉機(jī)轉(zhuǎn)向+角度傳感器系統(tǒng)主要包括拖拉機(jī)轉(zhuǎn)向執(zhí)行子機(jī)構(gòu)和角度傳感器,它能夠快速地實時響應(yīng)控制器所發(fā)送的轉(zhuǎn)向指令,從而自動控制拖拉機(jī)的轉(zhuǎn)向,并將實時數(shù)據(jù)檢測結(jié)果進(jìn)行反饋。
1.2 拖拉機(jī)路徑跟蹤原理
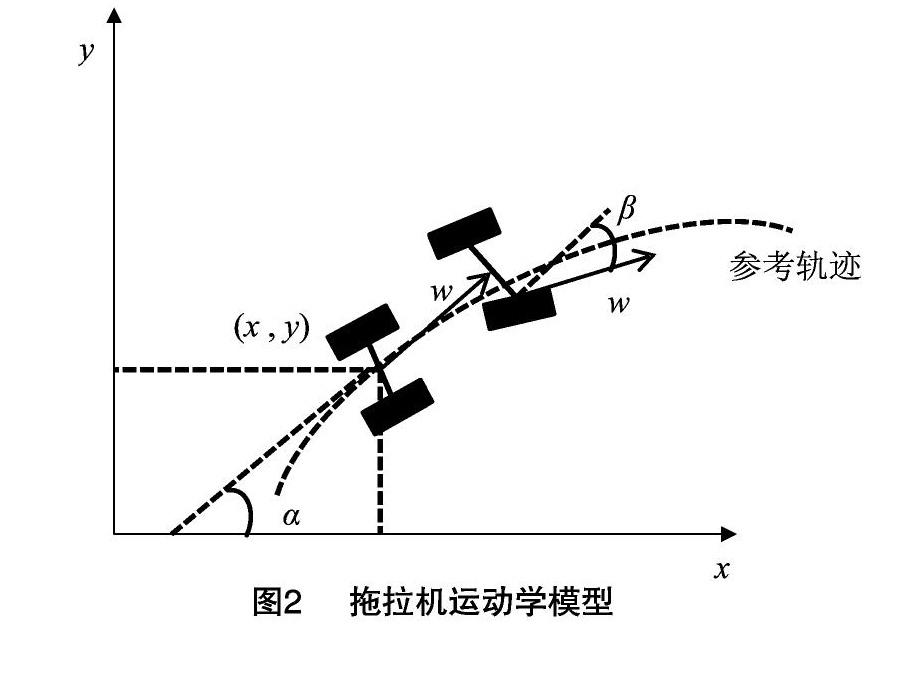
拖拉機(jī)路徑跟蹤作為拖拉機(jī)自動駕駛中的關(guān)鍵執(zhí)行層控制技術(shù),是影響車輛安全性與舒適性的關(guān)鍵技術(shù)。拖拉機(jī)路徑跟蹤由路徑跟蹤控制器執(zhí)行,它是通過不斷生成速度和轉(zhuǎn)向命令來自動補(bǔ)償跟蹤誤差,從而使拖拉機(jī)沿著已經(jīng)規(guī)劃好的路徑繼續(xù)前進(jìn)[24],主要參數(shù)包括拖拉機(jī)偏離路徑的距離與航向角。常見的路徑跟蹤方法按照使用模型的不同分為動力學(xué)模型和運(yùn)動學(xué)模型。其中運(yùn)動學(xué)模型通常將拖拉機(jī)車輛轉(zhuǎn)換成四輪驅(qū)動的機(jī)器人剛性機(jī)構(gòu),因拖拉機(jī)運(yùn)動時屬于低速行駛,所以不需要考慮動力學(xué)問題,因此采用運(yùn)動學(xué)模型設(shè)計的軌跡跟蹤控制器具有可靠的控制性能[25],如圖2所示,拖拉機(jī)的運(yùn)動學(xué)模型方程為
xyα=cosα0sinα001υω。(1)
式中:x為后軸中心的橫坐標(biāo);y為后軸中心的縱坐標(biāo);α為車輛的航向角;β為前輪偏角;ι為軸距;υ為后軸中心的速度;ω為車輛的橫擺角速度。
車輛的橫擺角速度為
ω=υιtanβ。(2)
通過運(yùn)動學(xué)模型方程可以看出,通過對后軸中心速度υ和車輛的橫擺角速度ω的控制,就可以實現(xiàn)拖拉機(jī)在坐標(biāo)系里不同位置和姿態(tài)的運(yùn)動。常見的控制算法有模型預(yù)測控制(MPC)、比例積分微分控制(PID)、滑模控制(SMC)以及模糊控制(FC)等,多種控制方法的結(jié)合會使得路徑跟蹤的效果更加準(zhǔn)確,在此不再一一進(jìn)行贅述。
2 液壓轉(zhuǎn)向與電動方向盤自動駕駛的區(qū)別
拖拉機(jī)自動駕駛方式按照執(zhí)行機(jī)構(gòu)主要分為2種,一種是電動方向盤自動駕駛,另一種是液壓轉(zhuǎn)向自動駕駛[26]。2種不同駕駛方式分別是從不同的技術(shù)產(chǎn)品以及應(yīng)用演化而來,液壓轉(zhuǎn)向自動駕駛方式是在歷年農(nóng)機(jī)無人駕駛技術(shù)的研究基礎(chǔ)上簡化而來,而電動方向盤自動駕駛則由目前全球?qū)Ш降壎鴣怼k妱臃较虮P自動駕駛由于不需要改變農(nóng)機(jī)的原有轉(zhuǎn)向系統(tǒng),且安裝方便、結(jié)構(gòu)簡單而得到行業(yè)用戶的廣泛青睞,而液壓轉(zhuǎn)向自動駕駛則需要對原有轉(zhuǎn)向系統(tǒng)如油路和結(jié)構(gòu)性能作重大改變,常用于大型農(nóng)場機(jī)械作業(yè)[21]。
(1)電動方向盤自動駕駛:工作原理是控制器通過分析拖拉機(jī)角度傳感器信息,計算出轉(zhuǎn)向輪期望轉(zhuǎn)角以及轉(zhuǎn)向力矩,控制電機(jī)為4個轉(zhuǎn)向輪提供所需要的轉(zhuǎn)向力矩,實現(xiàn)自動轉(zhuǎn)向。通常由車載衛(wèi)星天線、數(shù)據(jù)處理器模塊、角度傳感器、電動方向盤、導(dǎo)航系統(tǒng)模塊以及其他線路組成。
(2)液壓轉(zhuǎn)向自動駕駛:工作原理是控制器通過分析拖拉機(jī)角度傳感器信息,自動計算轉(zhuǎn)向輪的期望轉(zhuǎn)角與實際轉(zhuǎn)角的差值,通過控制電磁閥閥芯來改變液壓油的流向與速度,進(jìn)而控制轉(zhuǎn)向輪的偏轉(zhuǎn)方向和轉(zhuǎn)動角度。通常由車載衛(wèi)星天線、數(shù)據(jù)處理器模塊、角度傳感器、液壓閥、ECU控制器以及其他線路組成。
3 材料與方法
3.1 試驗條件和試驗設(shè)備
試驗在江蘇農(nóng)博園的農(nóng)機(jī)作業(yè)實訓(xùn)場地中進(jìn)行,行進(jìn)速度分別選取適合江蘇地區(qū)的免耕播種作業(yè)速度3、5、7 km/h。試驗現(xiàn)場采用的是由東方紅954拖拉機(jī)加裝的液壓轉(zhuǎn)向和電動方向盤的自動駕駛拖拉機(jī),控制器采用雙天線解決方案、MPC控制算法,可在車輛靜止時確定航向,避免出現(xiàn)起步彎,并在低速工作中,保證良好的直線度。電動版內(nèi)置慣導(dǎo)模塊,可以對全地形進(jìn)行補(bǔ)償,保證拖拉機(jī)在坡地高速等作業(yè)工況時,仍能保持精度。車輪轉(zhuǎn)角狀態(tài)采集采用非接觸式(Gasensor)類型的角度傳感器,車身角度分別選擇平行和傾斜45°進(jìn)行測試。
3.2 評價性能指標(biāo)
本次路徑跟蹤分析試驗采用3個評價性能指標(biāo),分別是控制系統(tǒng)的性能指標(biāo)、入線米數(shù)和直線度。分析2種不同駕駛方式的控制系統(tǒng)性能指標(biāo)以及前進(jìn)和倒退時AB線的直線度和入線米數(shù)。
(1)拖拉機(jī)控制系統(tǒng)的性能指標(biāo)主要包括動態(tài)和穩(wěn)態(tài)性能指標(biāo)。動態(tài)指標(biāo)包含超調(diào)量、延滯時間、上升時間、峰值時間、調(diào)整時間等;穩(wěn)態(tài)性能指標(biāo)用穩(wěn)態(tài)誤差進(jìn)行衡量。
(2)入線米數(shù):實際路徑逼近參考路徑時所需要的距離。
(3)直線度:實際路徑在縱向跟蹤過程中的誤差。
4 田間試驗與結(jié)果分析
4.1 控制系統(tǒng)性能分析
以5 km/h的前進(jìn)速度在江蘇農(nóng)博園農(nóng)機(jī)作業(yè)實訓(xùn)場地進(jìn)行液壓轉(zhuǎn)向和電動方向盤駕駛方式控制系統(tǒng)的階躍響應(yīng)測試試驗,分別選取1、3、5、10、15、20、25、30等8種不同的轉(zhuǎn)角角度來進(jìn)行分析研究。
4.1.1 動態(tài)性能分析 測試試驗中液壓轉(zhuǎn)向和電動方向盤駕駛方式均沒有超調(diào)量,在此不再作分析。從圖3可以看出,隨著轉(zhuǎn)角角度的增大,2種方式的延滯時間、上升時間、峰值時間、調(diào)整時間也呈上升趨勢。轉(zhuǎn)角角度在20°以下時,電動方向盤方式的動態(tài)性能指標(biāo)明顯高于液壓轉(zhuǎn)向方式。
4.1.2 穩(wěn)態(tài)性能分析 從圖4可以看出,隨著轉(zhuǎn)角角度的增大,2種方式的穩(wěn)態(tài)誤差呈下降趨勢,且電動方向盤方式的穩(wěn)態(tài)誤差明顯低于液壓轉(zhuǎn)向方式。
4.2 入線數(shù)據(jù)分析
從表1和表2可以看出,在同一車輛速度和車身角度條件下,入線米數(shù)隨著距離線位置的增加而增加;在同一距離線位置和車身角度的條件下,入線米數(shù)隨著車輛速度的增加而增加;在同一款車輛速度和距離線位置的條件下,車身角度增大,入線米數(shù)明顯增大;電動方向盤方式除了在車身平行車輛前進(jìn)速度在3、7 km/h的情況下,其他大多數(shù)情況入線米數(shù)均小于液壓轉(zhuǎn)向方式。
4.3 直線度分析
從表3可以看出,液壓轉(zhuǎn)向和電動方向盤方式均能保持良好的直線度,可以保證在±2 cm的精度內(nèi)。經(jīng)過數(shù)據(jù)處理后可知,液壓轉(zhuǎn)向自動駕駛方式的標(biāo)準(zhǔn)差為1.31 cm,電動方向盤自動駕駛方式的標(biāo)準(zhǔn)差為0.76 cm,由結(jié)果可以看出,電動方向盤自動駕駛方式直線度略好于液壓轉(zhuǎn)向自動駕駛方式。
5 結(jié)論
本研究針對目前液壓和電動2種自動駕駛方式路徑跟蹤分析進(jìn)行了深入研究,對拖拉機(jī)自動駕駛的基本組成及路徑跟蹤原理進(jìn)行了探討,分析液壓和電動2種自動駕駛方式的區(qū)別,隨后進(jìn)行了田間試驗研究,試驗測試2種方式的控制系統(tǒng)性能、直線度性能和入線度數(shù)據(jù),得出以下結(jié)論:(1)液壓轉(zhuǎn)向和電動方向盤自動駕駛方式控制系統(tǒng)的階躍響應(yīng)測試試驗結(jié)果表明,電動方向盤自動駕駛方式的動態(tài)性能指標(biāo)高于液壓轉(zhuǎn)向駕駛方式,穩(wěn)態(tài)性能優(yōu)于液壓轉(zhuǎn)向自動駕駛方式;(2)在相同條件下,電動方向盤自動駕駛方式在多數(shù)情況下入線米數(shù)少于液壓轉(zhuǎn)向自動駕駛方式,直線度的標(biāo)準(zhǔn)差比液壓轉(zhuǎn)向自動駕駛方式低 0.55 cm。
本研究發(fā)現(xiàn),液壓和電動2種自動駕駛方式都能保持良好的路徑跟蹤效果和穩(wěn)定性,同時滿足農(nóng)業(yè)生產(chǎn)需求,但電動方式略優(yōu)于液壓方式,且由于產(chǎn)品不需要改變原有轉(zhuǎn)向系統(tǒng)、安裝方便,從而得到行業(yè)用戶的廣泛青睞。
參考文獻(xiàn):
[1]譚晨佼,李軼林,王東飛,等. 農(nóng)業(yè)機(jī)械自動導(dǎo)航技術(shù)研究進(jìn)展[J]. 農(nóng)機(jī)化研究,2020,42(5):7-14,32.
[2]Zhang N Q,Wang M H,Wang N. Precision agriculture—A worldwide overview[J]. Computers and Electronics in Agriculture,2002,36(2/3):113-132.
[3]Morimoto R,Hayshi K. Design of smart agriculture Japan model[J]. Advances in Animal Biosciences,2017,8(2):713-717.
[4]Michael C. Farming 4.0 und andere anwendungen des Internet der dinge[J]. Gesellschaft für Informatik,2016(33):15-18.
[5]劉成良,林洪振,李彥明,等. 農(nóng)業(yè)裝備智能控制技術(shù)研究現(xiàn)狀與發(fā)展趨勢分析[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2020,51(1):1-18.
[6]Li S C,Xu H Z,Ji Y H,et al. Development of a following agricultural machinery automatic navigation system[J]. Computers and Electronics in Agriculture,2019,158:335-344.
[7]秦 宇,周 宇,趙 亮. 面向農(nóng)機(jī)自動駕駛的5G/大數(shù)據(jù)技術(shù)應(yīng)用展望[J]. 郵電設(shè)計技術(shù),2020(5):36-40.
[8]章軍輝,陳大鵬,李 慶. 自動駕駛技術(shù)研究現(xiàn)狀及發(fā)展趨勢[J]. 科學(xué)技術(shù)與工程,2020,20(9):3394-3403.
[9]王金強(qiáng),黃 航,郅 朋,等. 自動駕駛發(fā)展與關(guān)鍵技術(shù)綜述[J]. 電子技術(shù)應(yīng)用,2019,45(6):28-36.
[10]鄭文鐘. 國內(nèi)外智能化農(nóng)業(yè)機(jī)械裝備發(fā)展現(xiàn)狀[J]. 現(xiàn)代農(nóng)機(jī),2015(6):4-8.
[11]孫連燭,張兆國,付衛(wèi)強(qiáng),等. 拖拉機(jī)電液與電機(jī)兩種自動轉(zhuǎn)向方式對比試驗[J]. 農(nóng)機(jī)化研究,2021,43(6):253-258.
[12]陳文良,宋正河,毛恩榮.拖拉機(jī)自動駕駛轉(zhuǎn)向控制系統(tǒng)的設(shè)計[J]. 華中農(nóng)業(yè)大學(xué)學(xué)報,2005(增刊1):57-62.
[13]張智剛,王桂民,羅錫文,等. 拖拉機(jī)自動駕駛轉(zhuǎn)向輪角檢測方法[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2019,50(3):352-357.
[14]Ma J F,Wang D C,Tang Y W,et al. Automatic control system of agricultural machinery based on Beidou navigation[C]//2017 IEEE 3rd Information Technology and Mechatronics Engineering Conference (ITOEC). Chongqing:IEEE,2017:318-323.
[15]Dong Z Z,Wang H,Tang Y W,et al. Research on automatic driving system of agricultural machinery based on embedded[C]//2019 IEEE 3rd Information Technology,Networking,Electronic and Automation Control Conference (ITNEC). Chengdu:IEEE,2019:1940-1943.
[16]何 杰,朱金光,羅錫文,等. 電動方向盤插秧機(jī)轉(zhuǎn)向控制系統(tǒng)設(shè)計[J]. 農(nóng)業(yè)工程學(xué)報,2019,35(6):10-17.
[17]王大鹿. 數(shù)值迭代算法下的智能插秧機(jī)插秧路徑規(guī)劃[J]. 農(nóng)機(jī)化研究,2020,42(11):197-200,205.
[18]Liu K,Cheng G H,Kong Z G. Beidou agricultural machinery automatic driving software design[C]//2019 IEEE 4th Advanced Information Technology,Electronic and Automation Control Conference (IAEAC). Chengdu:IEEE,2019:1770-1775.
[19]奚小波,史揚(yáng)杰,單 翔,等. 基于Bezier曲線優(yōu)化的農(nóng)機(jī)自動駕駛避障控制方法[J]. 農(nóng)業(yè)工程學(xué)報,2019,35(19):82-88.
[20]史揚(yáng)杰,奚小波,吳 飛,等. 電機(jī)式北斗農(nóng)機(jī)自動駕駛系統(tǒng)設(shè)計與試驗[J]. 東北農(nóng)業(yè)大學(xué)學(xué)報,2019,50(4):88-96.
[21]唐天石. 淺談液壓和電動兩種農(nóng)機(jī)自動駕駛的方式[J]. 農(nóng)業(yè)工程技術(shù),2019,39(36):70-72.
[22]李世超,曹如月,季宇寒,等. 基于不同電機(jī)的拖拉機(jī)自動導(dǎo)航轉(zhuǎn)向控制系統(tǒng)性能對比[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2019,50(增刊1):40-49.
[23]蘆海濤,張居同. 農(nóng)機(jī)導(dǎo)航自動駕駛系統(tǒng)的組成和分析[J]. 農(nóng)業(yè)工程技術(shù),2019,39(36):67-69.
[24]Morales J,Martínez J L,Martínez M A,et al. Pure-pursuit reactive path tracking for nonholonomic mobile robots with a 2D laser scanner[J]. EURASIP Journal on Advances in Signal Processing,2009(1):935237.
[25]韓 冰,陳 軍. 拖拉機(jī)行駛路徑的多項式設(shè)計[J]. 農(nóng)機(jī)化研究,2006(10):98-99,106.
[26]陳秀蓮. 拖拉機(jī)無人自動駕駛技術(shù)應(yīng)用[J]. 山東農(nóng)機(jī)化,2020(5):44-45.
