地質導向鉆井著陸關鍵技術及分析圖版
2021-09-26 09:11:50林昕苑仁國譚偉雄郭家佟昕航陳玉山
斷塊油氣田 2021年5期
關鍵詞:作業
林昕,苑仁國,譚偉雄,郭家,佟昕航,陳玉山
(中海油能源發展股份有限公司工程技術分公司,天津 300452)
0 引言
水平井井眼軌跡控制包括著陸段和水平段2個關鍵井段。著陸段是水平段作業的基礎,良好的著陸作業可降低因鉆穿儲層而填井側鉆、水平段起始階段大幅調整井眼軌跡等鉆井風險[1]。區塊作業者通常采用地質導向鉆井技術支持著陸作業,以提高其成功率。著陸作業因其風險高、難度大,被業內比喻為“在大霧中,將飛機降落在高低起伏不平的跑道上”[2]。現有的著陸作業模式主要依賴個人經驗,通常由多專業的隨鉆團隊(包括地質導向、隨鉆測井、定向井、油藏、地球物理及地質等)跟井,以下達作業指令[3],因此,存在因個人經驗差別影響預測精度、跨專業信息協同影響作業決策效率等問題。國內外學者對著陸作業相關研究集中于對現場作業流程整理、經驗總結,以及高級隨鉆測井(Logging-While-Drilling,LWD)工具的應用[4-6],已有研究成果中未見到針對著陸過程控制的算法研究。
地質導向鉆井著陸本質上是指將鉆井軌跡以正確的深度、井斜和方位角擺放到目的層中。因此,需要將目的層預測和鉆井軌跡控制緊密結合。因為預測手段的局限性,可造成目的層預測的垂深誤差從幾米到十幾米不等,相應的軌跡調整需要同預測結果保持動態同步。為此,本文研究了針對地質導向鉆井著陸過程分析的算法流程以輔助作業決策。本研究從目的層預測和軌跡控制計算2個方面展開,提出了基于上述算法流程自動分析預測的分析圖版方法,便于分析人員直觀獲取著陸作業的關鍵信息以提高協同決策效率,實現對著陸作業的過程控制。
1 目的層預測
目的層預測需要綜合利用錄井、地震剖面、正鉆井和鄰井測井曲線等資料[7-8]。不同資料存在各自的局限性,例如錄井數據受遲到時間的影響,不能及時反映地層變化信息;地震資料分辨率低,無法指導工程決策。目前應用最廣泛的是利用測井曲線的標志層對比進行目的層預測的方法。本文采用以下算法步驟實現目的層預測功能:
1.1 測井曲線對比
測井曲線對比是根據正鉆井和鄰井的測井曲線形態進行相似性對比,獲取正鉆井相對鄰井地層層序的位置校正。測井曲線所記錄的地層物理性質隨井深發生變化,在巖性不同地層的界面位置,這種變化表現的最為劇烈[9-11]。本文采用了皮爾森相關系數r(Pearson Correlation Coefficient,PCC)來計算測井曲線形態之間的相似性[12-13],計算公式為
式中:xi,yi為不同測井序列的樣本值;下標i為序號;N為序列樣本個數;r為 PCC 值,取值范圍為[-1,1],結果為1時,表示2個序列相關性最強,結果為-1時,表示相關性最弱。
以正鉆井測井曲線作為樣本,搜索鄰井不同深度位置進行曲線形態的相似性對比。圖1展示了某著陸井全井段r值的分布,在垂深5 100~5 200 m處出現2個相關性較強的對比結果,其r值分別為0.91和0.62。需要指出的是,在正鉆井曲線數據量較少的情況下,基于形態的相似性,對比方法會出現多個近似峰值的情況,這種情況下,該對比方法不能明確指示正鉆井相對鄰井地層層序的位置校正。
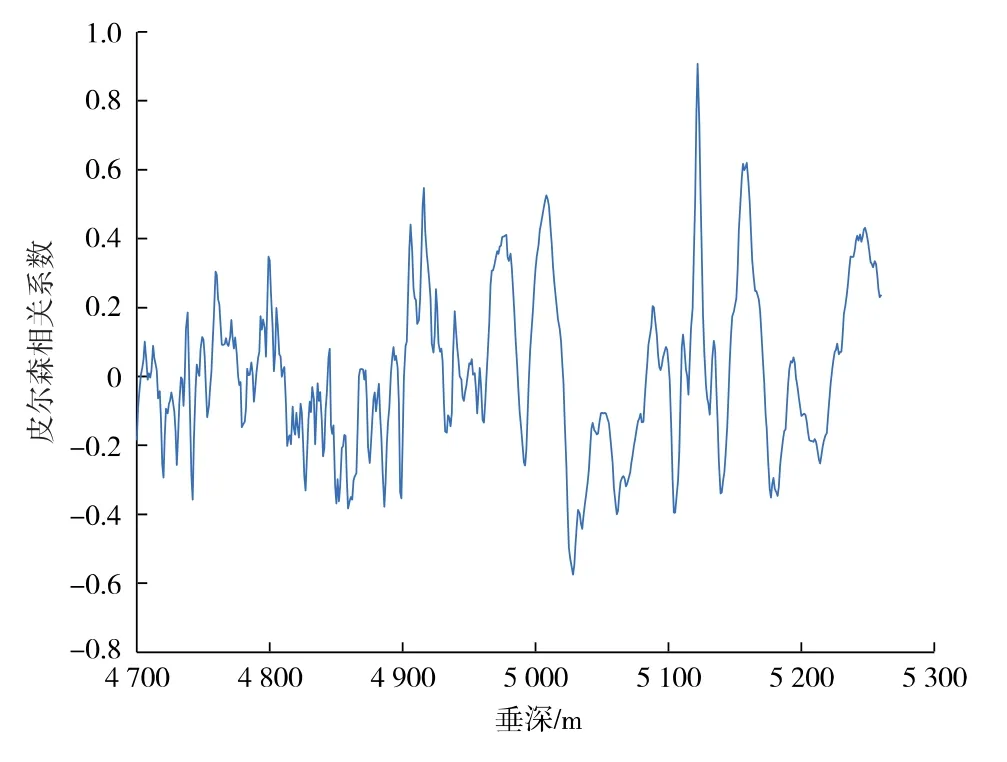
圖1 某著陸井全井段r值分布
截取并放大該井段的測井曲線,如圖2a所示。其中相關性最強的2個井段分別用紅色和藍色橫虛線標識為對比1和對比2,并放大展示為圖2b和2c,代表了2種可能的對比方案。人工分析的方法無法直接排除任意一種對比方案,利用r可以量化不同對比方案的可信度。該案例中對比1的可信度更高。
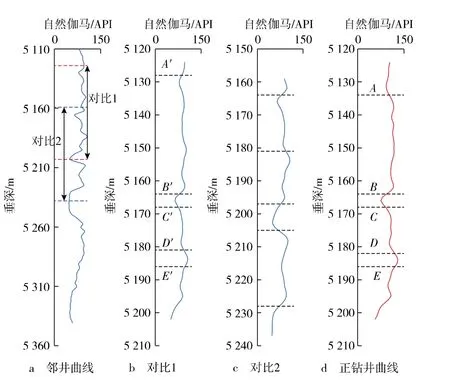
圖2 隨鉆曲線對比示意
1.2 標志層對比
標志層對比是通過劃分正鉆井和鄰井的標志層,結合鄰井標志層層間距預測正鉆井目的層垂深。區別于常規測井解釋中的精細地層對比,著陸作業的地層對比通常只關注區域內發育穩定或明顯的地層。分析人員將這種沉積環境穩定、變化特征明顯的地層提取為標志層后,進行標志層之間的配對,可以消除地層發育、構造環境等因素造成的細微變化影響。
利用標志層對比結果預測目的層位置是基于鄰井標志層層間距固定的前提假設。顯然,不同鄰井的標志層層間距存在差異,因此地層預測結果以區間范圍形式存在。通常情況下,標志層劃分越精確、鄰井與正鉆井距離越近、鄰井數量越多,預測結果準確度越高。實現標志層對比包括以下3個步驟:1)劃分標志層組;2)標志層組配對;3)預測目的層垂深。
首先要完成正鉆井和鄰井測井曲線的標志層序列自動劃分,為此,采用了曲線活度計算方法[14]。計算公式為
式中:Ed為活度函數值;d為活度函數值位置;n為計算活度時的長度設置;xi為測井曲線的離散值;i為序號;為 xi在區間[d-n,d+n]內的平均值。
選取活度值最高的5標志層作為劃分結果序列,運算結果如圖2b—2d中黑色虛線,選取的活度最高的2套標志層序列并不全部滿足一一對應的關系。
其次,實現2套標志層序列的自動配對。通過自動劃分獲得的2套標志層序列存在多種配對可能性的情況。結合前人研究成果[15],設定如下標志層配對規則:1)允許不連續配對;2)不允許交叉配對。為實現該規則,本文借鑒動態彎曲路徑的算法思路[16],建立2組標志層序列的r矩陣(見表1)。矩陣網格代表了不同序列標志層之間的r值。
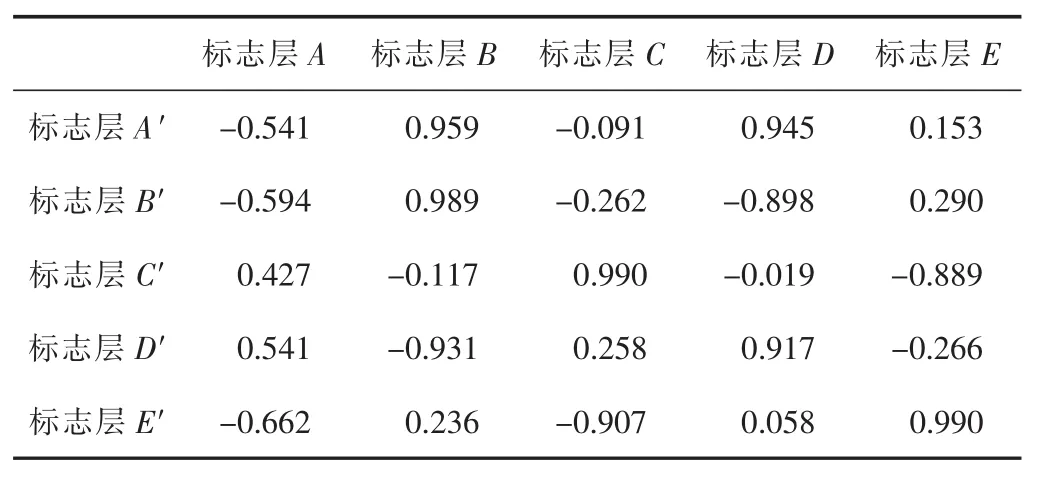
表1 用于標志層自動對比的r矩陣
選定矩陣的任意位置Rij作為起始對比標志層組,其下一組對比只能從i+1(行)和j+1(列)為起始的矩陣內尋找,矩陣中的負數說明2個標志層不相關,可以直接跳過。通過比較標志層對比的不同組合情況下的累加r值獲取最佳標志層配對方案。表1展示BB′-CC′-DD′-EE′為最佳方案(對應的測井曲線圖為2b和2d)。
最后,根據鄰井標志層層間距預測最佳方案下的正鉆井目的層垂深。需要注意的是,此處著陸地層垂深是針對當前水平位移處垂直向下預測得到的地層結果。統計多口鄰井、不同標志層的預測值可得到目的層的垂深分布范圍。
2 軌跡控制計算
地質導向區別于幾何導向,其在鉆進過程中需要根據隨鉆數據分析得到的目的層位置變化,對鉆井軌跡進行動態調整。對比設計著陸點,目的層垂深的變化存在提前或滯后2種情況,需采取以下措施:1)如地層提前,則需要提高軌跡增斜率,避免鉆穿目的層;2)如地層滯后,則需要穩斜(或降斜)下探,確保在設計靶前位移距內著陸。軌跡控制計算是為了和上一節的目的層預測結果進行匹配分析,確保軌跡可到達的垂深覆蓋目的層預測分布范圍。
不同井的導向目標存在差異,會影響著陸作業的軌跡控制方案。例如為提高水平井產能,將軌跡放置在貼近地層頂部;或者為確保鉆遇率,將軌跡放置在地層中部等[17-18]。為方便討論,選用常見的著陸作業場景進行研究,并假設著陸存在以下條件:1)著陸目標位置為地層中部;2)著陸點位移不允許超過設計靶前位移距。
2.1 著陸窗口計算
如圖3所示,K為造斜點,L為著陸點,F為完鉆點。鉆井軌跡上取任意位置點M為正鉆井鉆頭位置,由M延伸出去的2條虛線分別代表該M點在軌跡最大造斜率下能夠到達的最深W點(下邊界)和最淺S點(上邊界)垂深的預測著陸軌跡形態。
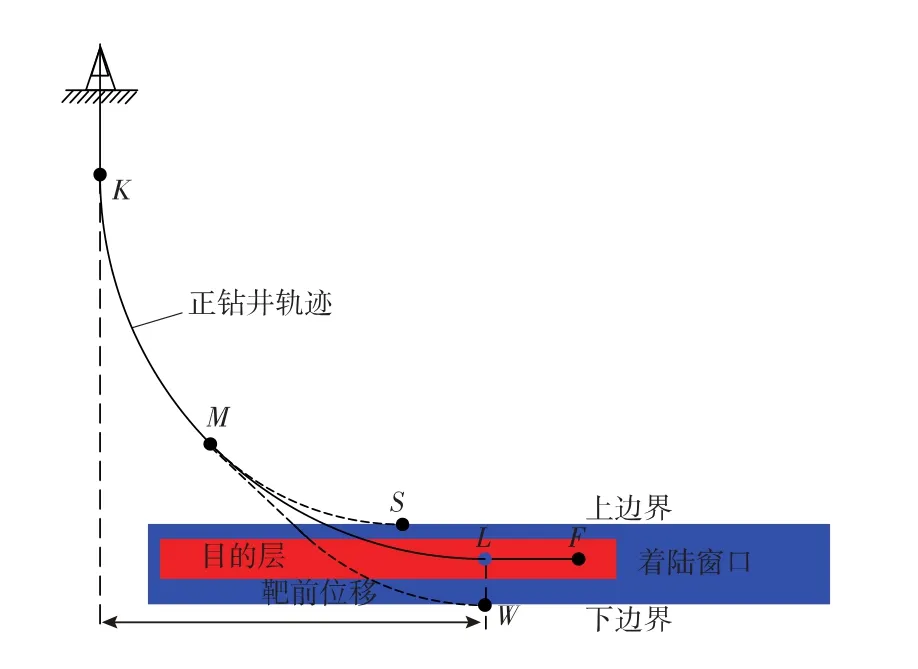
圖3 著陸窗口示意
此處定義著陸窗口包含3個參數:上、下邊界的垂深值,以及2條邊界之間的垂深差(如圖3藍色著陸窗口所示)。當藍色的著陸窗口能夠覆蓋紅色的目的層時,說明著陸作業正常。著陸窗口的高度變化如圖4所示,著陸窗口的計算是通過上下邊界的垂深差獲取的,可以觀察到,隨著井深的增加,2條邊界之間的距離變小,即著陸窗口高度不斷收縮變窄。
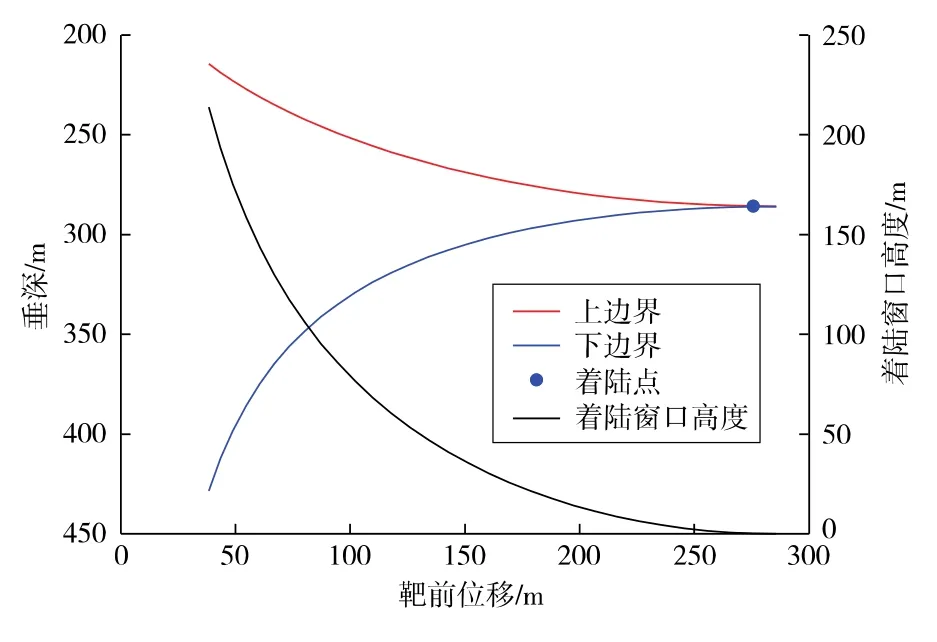
圖4 著陸窗口變化示意
可以發現,上邊界的著陸點S位移小于或等于設計靶前位移,而下邊界的著陸點W位移等于設計靶前位移。其中,最深軌跡著陸點W的垂深Wtvd的計算公式為

式中:Lvsec為設計著陸點位移,m;Svsec為 S點位移,m;Mvsec為 M 點位移,m;θ1為 M 點井斜角,(°);Stvd為上邊界垂深,m;Mtvd為井底垂深,m。
S點的相關參數為

式中:θ2為著陸點井斜角,(°);Smd為 S 點斜深,m;Mmd為 M 點斜深,m;BR 為軌跡增斜率,(°)/m。
在計算上邊界垂深時,需選取軌跡最大造斜率。
采用行業通用的最小曲率半徑法,計算得到軌跡的著陸窗口和水平位移的關系,部分數據如表2所示。計算時設置軌跡增斜率為6°/30 m,設置軌跡最大增斜率為12°/30 m。實際作業過程中,需要結合后期的完井施工井身質量要求對軌跡最大增斜率進行限制。需要說明的是,著陸過程中如出現因為地層滯后不得不采取降斜探層,說明前期著陸決策出現問題,此處下邊界計算時未考慮降斜的導向鉆進方案。
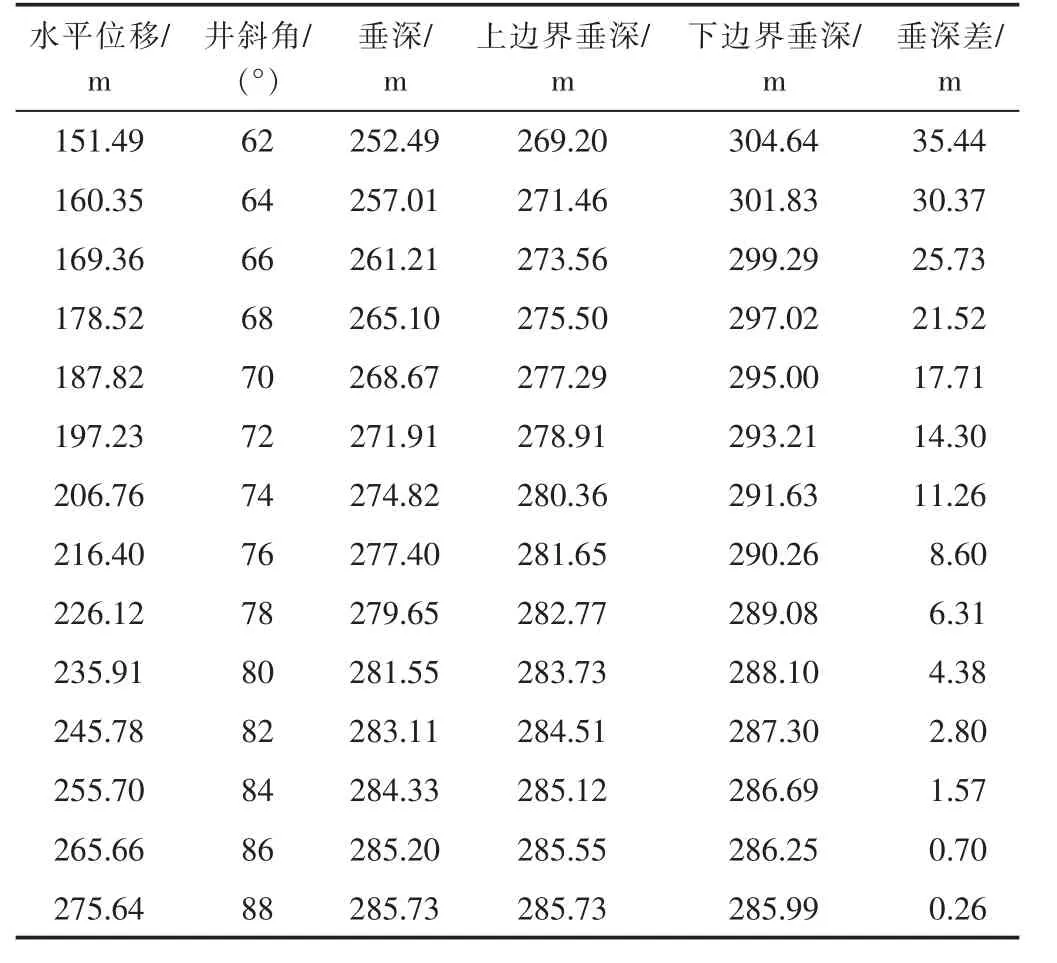
表2 著陸窗口計算模擬
實際作業過程中,可以通過多種手段對著陸窗口進一步擴大,例如在三維導向井著陸中,必要時候可以考慮犧牲方位以滿足井斜調整的需要,或者起鉆更換更高造斜率的定向工具。
2.2 探層角度計算
如圖5a所示,當軌跡靠近目的層時,為避免著陸井斜角同地層傾角夾角過大導致后續水平段作業鉆穿地層,通常采用如下方案:設定合適的探層角度保持井斜不變鉆進,確認目的層鉆達后,增加井斜角,與地層傾角保持一致。
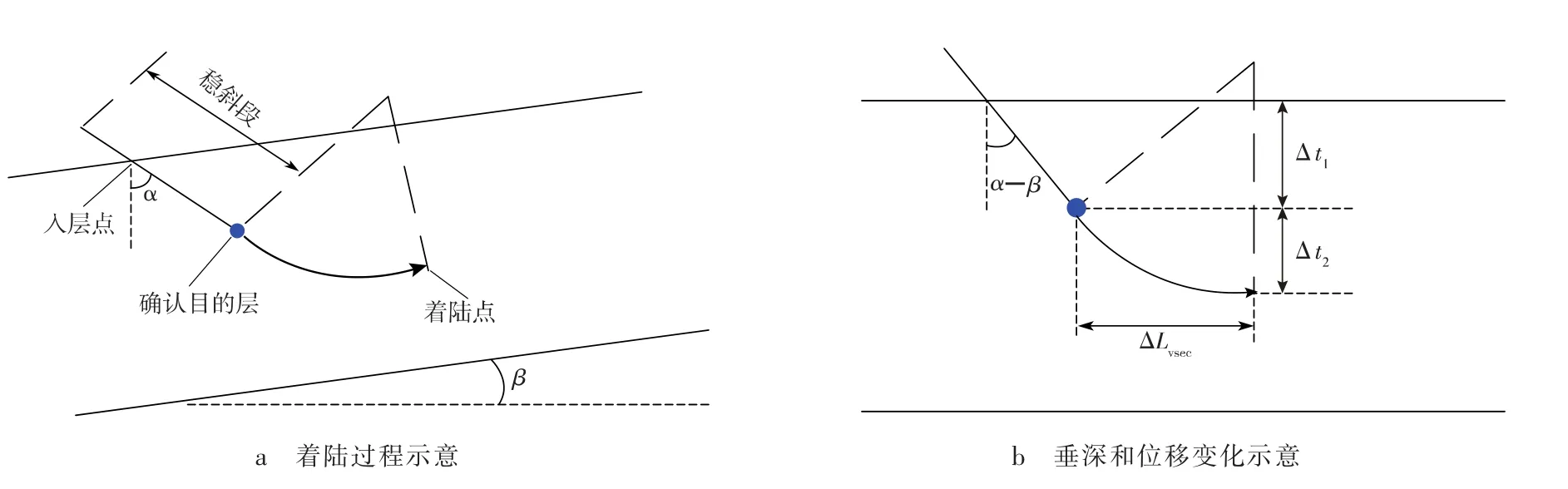
圖5 探層角度計算示意
探層角度設定需兼顧水平方向和豎直方向的軌跡位移變化。探層角度過大則偏保守,浪費水平段進尺;過小則偏激進,導致鉆穿地層底部。計算探層角度需要考慮3個因素:地層傾角、造斜率、地層厚度。
地層傾角計算有多種不同方法,這里僅結合上文提到的標志層匹配結果進行計算。根據上覆地層隨鉆獲取的標志層相關信息,假設有匹配的標志層A,A′,其對應垂深為 Atvd,A′tvd,斜深為 Amd,A′md,則視傾角 β計算公式為

造斜率通常根據工具參數、上覆地層鉆進中的工具造斜率統計等綜合分析,同時應結合工程設計中對于軌跡最大全角變化率限定的要求進行靈活設置;地層厚度通常是由鄰井數據、勘探地震資料、高級LWD探測結果[7]綜合分析獲取。
探層角度的計算公式為
式中:α 為探層角度,(°);Δt2為垂深變化,m;ΔLvsec為位移變化,m。
調整導向動力工具能力的BR值,可以獲得不同α對應的Δt2和ΔLvsec(見圖5b)。根據具體導向目標要求,設置Δt2和ΔLvsec。如圖5所示,著陸目標位置為目的層中部,則α設置應滿足Δt1+Δt2=T/2(Δt1為入層后穩斜段的垂深變化,m;T為地層厚度,m)。
3 分析圖版方法
前文研究了地質導向鉆井著陸的2項關鍵技術,并實現了在隨鉆過程中自動分析預測的算法功能。為了更直觀地對預測分析結果進行對比展示,本文提出了著陸作業的分析圖版方法,以下結合具體實例應用展開討論。
如圖6所示,某海上調整井地質導向鉆井著陸作業,導向團隊將目的層頂部發育的差儲層誤判為地層位置提前,增斜并著陸到差儲層導致第1次著陸失敗。隨后不得不降井斜進行第2次著陸,以下探目的層“甜點區”。最終著陸點距離設計著陸點有近65 m水平位移距離,影響了該井后期產能。此外,臺階狀的軌跡形態容易造成巖屑堆積、管串摩阻增加,為后續水平段鉆完井工程作業留下隱患。
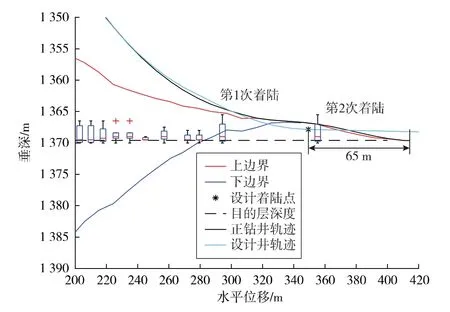
圖6 某地質導向鉆井著陸分析示意
在圖6中,紅色和藍色線分別代表著陸窗口的上邊界和下邊界;箱形數值統計圖代表基于多個鄰井(標志層)對比預測的目的層垂深的數值范圍。分析圖版方法可以更直觀地了解著陸過程中數據分析結果,并進行相應的導向決策調整。
盡管目的層預測的誤差數值范圍達到3~ 6 m,但箱形統計圖的中位數(紅線)緊貼實際地層深度線,準確指示了目的層深度,說明通過多鄰井對比得到的目的層預測結果較準確。導向團隊在第1次著陸決策過程中,其著陸窗口選擇為箱形數據的頂部,即基于個別井的對比結果進行決策。在水平位移270 m處,導向團隊決定提前增斜,最終導致目的層垂深在280 m處超出著陸窗口范圍。
通過分析圖版可以發現,著陸作業起始階段的著陸窗口遠大于目的層預測范圍,不建議過早介入導向干預,然而過晚介入則喪失調整的最佳時機。實際作業中,區塊作業者為了降低作業成本,通常會要求導向技術服務團隊晚介入。案例中導向團隊根據作業方要求,在井斜80°的時候接手該井。在位移260 m(井斜80°)處該井的目的層預測范圍已貼近著陸窗口下邊界,接手后調整空間小。考慮到普遍存在的因地層原因導致著陸軌跡自然增斜現象,即使分析判斷正確也會出現著陸窗口被動收縮的情況,因此,該接手方案是激進的,容易導致著陸失敗。作為未來區塊內待鉆井的參考,建議提前導向接手點到位移220~240 m(井斜72°~76°)處,即箱型統計圖位于著陸窗口中部位置時接手。
4 結論
1)研究了地質導向鉆井著陸作業中通用的2項關鍵技術:目的層預測和軌跡控制計算。目的層預測是在隨鉆過程中對著陸靶點參數進行調整優化;軌跡控制計算是依據目的層預測結果,計算沿導向軌跡的著陸窗口、探層角度,分別實現了對著陸深度和著陸軌跡姿態的動態分析。
2)提出了地質導向鉆井著陸作業分析圖版方法。分析圖版可以將地質預測和工程實施有機結合并以直觀的圖像形式展示,方便不同專業背景的作業人員快速獲取著陸作業關鍵信息,提高協同決策分析效率,實現對著陸作業的過程控制。
3)實現了針對地質導向鉆井著陸作業過程的自動分析預測功能。利用包括曲線活度、r矩陣、動態彎曲路線及標志層配對規則的算法流程實現該功能,相比人工方式提高了分析預測精度。本方法采用通用的常規測井曲線作為輸入,因此適用性強。本研究可以為實現地質導向鉆井技術智能化轉型和加強地質工程一體化開發提供參考。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
