基于擾動觀測器的微網逆變器魯棒H∞控制策略
2021-09-25 02:44:20何國鋒
可再生能源 2021年9期
關鍵詞:系統
何國鋒
(河南城建學院 電氣與控制工程學院,河南 平頂山 467036)
0 引言
微電網是由新能源構成的小型電網,既可以與大電網相連接在并網模式下工作,也能夠運行在孤島模式下,為本地負載提供電能。逆變器作為連接微電網與新能源發電的重要接口設備,在孤島模式下,能將可再生能源發出的電能經過轉換供給本地負載。孤島模式下的微網逆變器,在實際運行過程中會受到負載突變、濾波器元器件老化、直流側電壓波動等各種各樣的擾動,影響微網逆變器的輸出電能質量。逆變器作為新能源并網的關鍵部分,其控制器的設計直接影響微電網 系 統 的 電 能 質 量[1],[2]。
為了抑制系統擾動對孤島微網逆變器的影響,增強微網系統的穩定性,提高微網逆變器的輸出電能質量,國內外學者針對孤島微網逆變器的電壓控制方法及其系統的穩定性和穩態性能不斷地開展研究。文獻[3],[4]采用下垂控制的方法對孤島微電網進行有功-頻率、無功-電壓的控制。孤島微電網分布式電源具有的間歇性和波動性將會導致系統參數的攝動,而下垂控制器的動態性能有限,不具備抵抗系統大范圍擾動的能力,因此容易造成系統輸出電能質量下降,甚至造成系統不穩定的問題。文獻[5]根據微網控制的多個性能指標,分別設計出具有動態虛擬阻抗的電壓環和電流環。功率環的設計引入了自適應控制方法,采用自適應控制策略調整下垂系數,實現對微電網的控制。雖然多環控制能夠彌補傳統下垂動態性能不足的缺陷,但是控制器的設計過程復雜,計算量大,傳感器數量過多,缺乏對于實際應用的考慮。文獻[6]從微網系統電壓精準控制的角度出發,基于內模原理設計出應用于微網逆變器的比例諧振電壓控制器,以適應多種類型的負載。然而,單一諧振控制器只對固定階次諧波有效,在實現總諧波含量較低時則需要多重控制器,而且諧振控制器對于頻率過于敏感,易受系統擾動的影響。文獻[7],[8]從系統擾動抑制的角度出發,基于狀態反饋思想和LMI求解方法,設計出微網逆變器的魯棒控制器,實現了對負荷擾動的抑制;但是,系統的動態性能不夠理想,而且狀態反饋過程中用到的傳感器數量較多,不利于在實際系統中應用。文獻[9]將線性自抗擾控制技術引入到微電網的控制器設計中,將輸出電壓誤差的微分項引入到擴張狀態觀測器中,以提高觀測精度,并在總擾動作用通道增加了一階慣性環節,避免因擴張狀態觀測器帶寬增加而引入噪聲。由于系統待調參數較多,自抗擾控制器跟蹤交流信號的速度有限,使系統的動態性能受限。
以上所述文獻雖然針對微電網穩定性控制、擾動抑制和電壓精確控制等進行了探討,但是沒有同時對微電網系統中存在的多參數攝動問題和負載切換問題加以深入地研究。本研究結合實際孤島微網逆變器運行過程中存在的多參數攝動問題,基于魯棒H∞控制理論,建立了逆變器的多參數攝動模型。本文根據多參數攝動邊界和系統穩態性能要求設計了合適的權重函數;采用混合靈敏度設計方法求解逆變器的魯棒H∞控制器;采用擾動觀測器對負載投切時產生的電流擾動進行觀測和補償,以減小負載投切時對輸出電壓造成的影響。
1 多參數攝動的微網逆變器模型
孤島微電網原理如圖1所示。圖1中最左側為光伏發電、風力發電等可再生能源發電系統及其起到直流電壓變換作用的DC/DC模塊。儲能系統為微電網不間斷供電提供保障。逆變器作為微網系統與分布式電源連接的關鍵接口,起到電能變換的作用。

圖1 孤島微電網原理圖Fig.1 Schematic diagram of islanding microgrid
本文以孤島模式下的單相全橋逆變器作為研究對象,圖2為其電路原理圖。
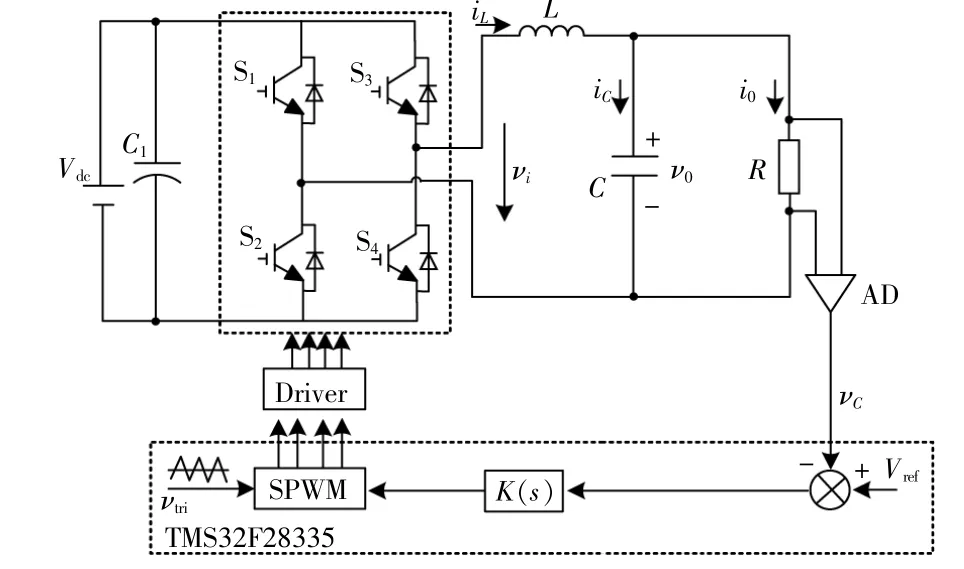
圖2 孤島微網逆變器電路原理圖Fig.2 Schematic diagram of inverter under islanding mode
圖2中:逆變器采用LC型濾波器;L為濾波電感值;C為濾波電容值;R為電阻性負載的阻值。電壓環采用魯棒控制策略和正弦脈寬調制方式,vtri為三角載波,其數字控制算法在DSP中實現。下面主要討論逆變器在多參數攝動情況下電壓控制環的魯棒控制器設計方法。
假設載波信號頻率遠遠高于正弦調制信號的頻率,根據基爾霍夫電壓和電流定律可以得出孤島微網逆變器的連續時域模型[9],[10]:

式 中:vi(t)為 逆 變 器 橋 臂 中 點 之 間 電 壓;iL(t)為 流過 電 感 的 電 流;v0(t)為 濾 波 電 容 上 的 電 壓;ic(t),io(t)分別為濾波電容和負載上的電流。
選 擇 電 感 電 流iL(t)和 電 容 電 壓v0(t)作 為 狀態 變 量,令x=[v0(t)iL(t)]T,u(t)=vi(t),可 得 如 下狀態方程:
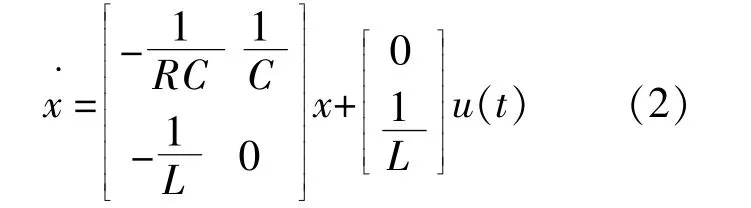
設微網逆變器系統中濾波器參數的基準值分別 為L0和C0,負 載 電 阻 的 基 準 值 為R0,令Gn(s)為微網逆變器系統中被控對象的基準傳遞函數:

在微網逆變器實際運行過程中,隨著運行工況、負載功率變化,器件的參數會隨之發生變化。假設濾波電感、濾波電容和負載參數攝動后的值分別為Lp,Cp,Rp,則考慮參數攝動后被控對象的傳遞函數可以表達為

基于單相逆變器的基準模型,本文采用乘性攝動的形式來表示被控對象的實際模型:G(s)=G0(s)[1+Δ(s)],其 中,Δ(s)為 乘 性 不 確 定 部 分。
圖3為采用乘性攝動形式的系統模型。

圖3 采用乘性攝動形式的系統模型Fig.3 System model with multiplicative perturbation
如圖3所示,經過代數變換可以得到乘性不確 定 性 Δ(s)如 下[11],[12]:

由式(5)可知,當器件參數實際值與基準值相等,即Lp=L0,Cp=C0,Rp=R0時,系 統 的 參 數 攝 動 量Δ(s)為零。考慮參數攝動有界,采用魯棒控制策略預先設定參數的變化范圍,參數在預定的范圍內變化時,系統仍然能夠穩定工作,并保持一定的魯棒性能。本文所設定的逆變器基準參數和參數攝 動 范 圍 如 下:R0=30Ω;L0=0.66 mH;C0∈22μF;Rp∈[20,40]Ω;Lp∈[0.3,0.9]mH;Cp=[10,30]μF。
2 魯棒H∞控制器設計
魯棒H∞控制在系統穩定、擾動抑制等方面得到廣泛應用。當被控對象的數學模型中存在擾動時,所設計出的魯棒控制器不僅可以維持系統穩定,而且能夠保證設計所要求的魯棒性能,在一定程度上彌補了現代控制理論的不足[13],[14]。
2.1 混合靈敏度分析
混合靈敏度優化理論可以同時解決系統的魯棒穩定性和魯棒性能,即多目標優化問題。本文采用混合靈敏度優化法設計微網逆變器的魯棒控制器,以滿足設計所需的靜態特性和魯棒穩定性。圖4為混合靈敏度控制框圖[15]~[18]。圖4中:w為參考輸入信號;e為誤差信號;u為控制器產生的控制信 號;v0為 微 網 逆 變 器 的 輸 出 電 壓;z1,z2,y為 評 價信 號;Gn(s)為 基 準 被 控 對 象。
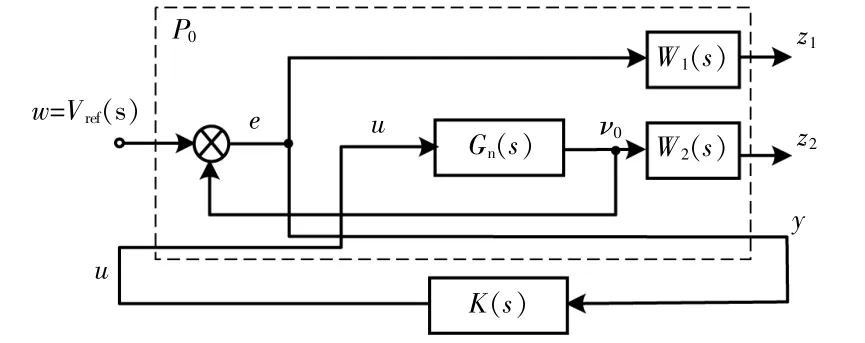
圖4 混合靈敏度控制框圖Fig.4 Block diagram by mixed sensitivity control
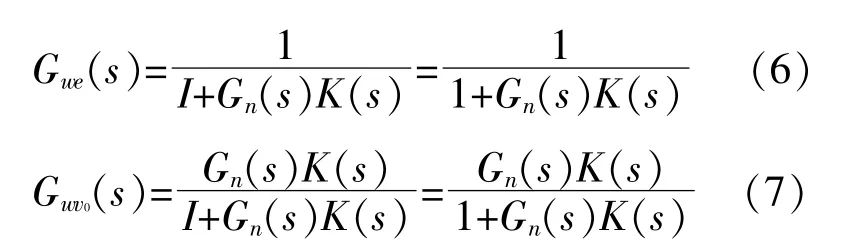
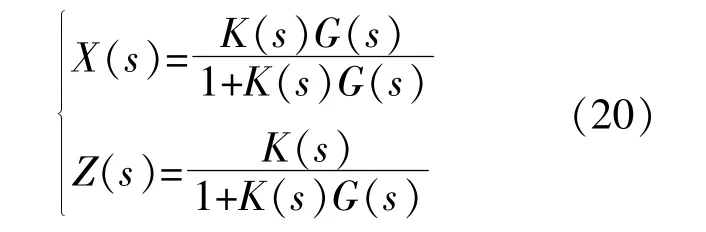
從參考信號w到誤差信號e和輸出信號v0的閉環傳遞函數分別為


考慮加權混合靈敏度問題的基本結構如下:
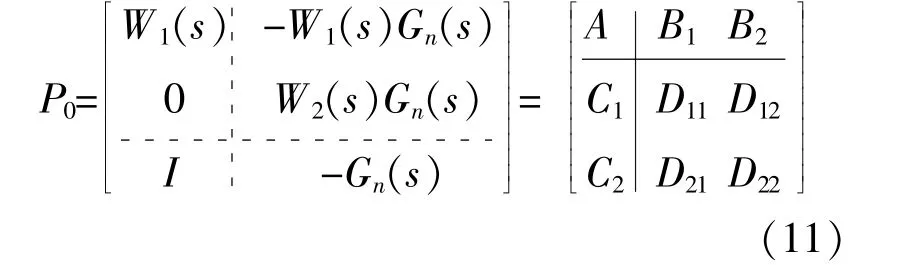
其中,廣義受控對象的狀態空間表達式為
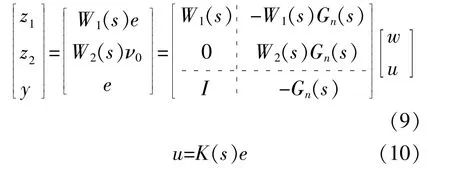
聯 立 式(8)和 式(9),參 考 信 號w至 評 價 信 號z1,z2之間的閉環傳遞函數矩陣為

根據小增益定理,混合靈敏度設計問題可以表示為尋找實有理控制器K(s),使閉環系統穩定,且滿足以下條件:

通常表示為
設計方法的關鍵是在頻域內選擇合適的加權函數W1,W2,使其滿足閉環系統設計的多目標要求。魯棒H∞控制器的具體設計步驟如下[19]:
①根據控制系統的特點設計合適的權重函數W1,W2;
②在魯棒H∞標準框架下求取閉環系統的控制器;
③考慮控制器的實現問題,降低控制器K(s)的階數,同時不降低控制器的性能。
2.2 電壓環魯棒H∞控制器設計
根據上述魯棒H∞控制器設計步驟,首先設計W1(s)。靈 敏 度 函 數S(s)表 示 從 參 考 信 號w到系統誤差信號e的傳遞函數。由式(14)可知,靈敏度 函 數S(s)的 形 狀 可 以 由 權 重 函 數W1(s)來 調整,選擇二階函數作為權重函數W1(s)的函數類型[20]:
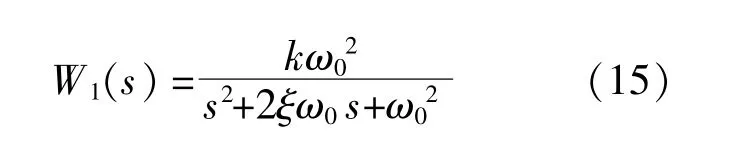
式中:k為比例系數;ω0為基波角頻率;ξ為阻尼系數。
阻 尼 系 數 ξ越 小,則W1(s)的 峰 值 越 大,帶 寬越窄。當阻尼系數x趨近于零時,所設計出的控制器性能類似于理想的諧振控制器,理論上可以在工頻處實現零穩態誤差。本文經過理論分析與仿真 對 照 后,選 擇k=1,ω0=314 rad/s,x=0.01。
關 于 權 重 函 數W2(s)的 設 計,由 式(5)可 知:

Δ(s)為多參數攝動引起的乘性攝動量。為了研究多參數攝動對攝動量 Δ(s)的影響,按照表1數據做出不同參數攝動情況下的 Δ(s)函數圖像(圖5)。
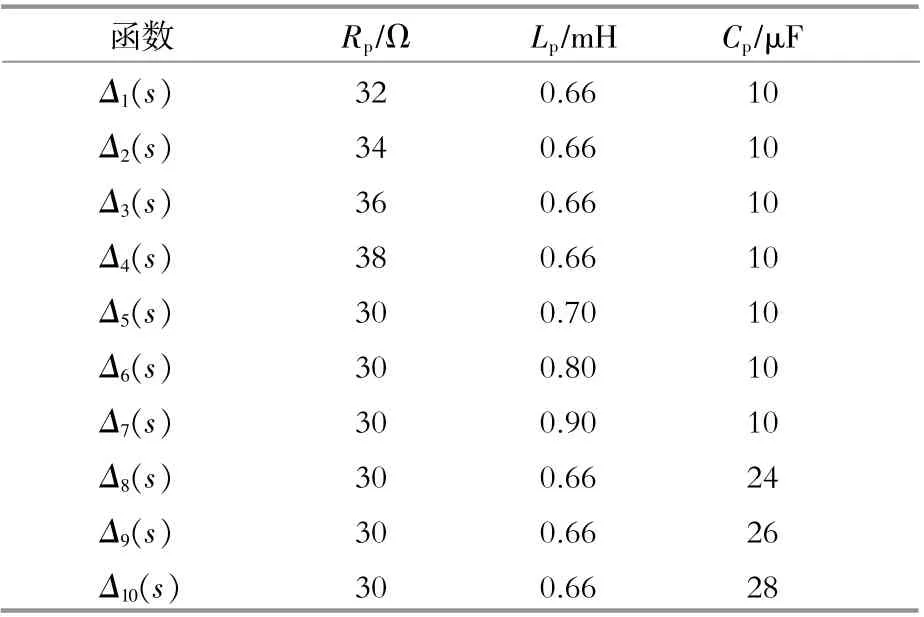
表1 參數攝動表Table 1 Multi-parameters perturbation
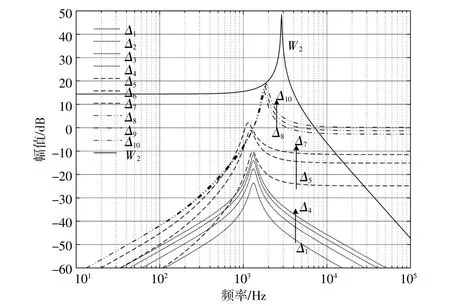
圖5 參數攝動量Δ(s)與權重函數W2(s)Fig.5 PerturbationΔ(s)and weighting function W2(s)
圖5所示為多種類型的系統參數同時偏離基準 值 時 的 攝 動 量 Δ(s)曲 線。對 比 Δ1(s)~Δ4(s)的 曲線可知,當電感和電容值不變時,隨著電阻實際值與基準值的偏離程度不斷增加,系統相對攝動量Δ(s)的峰值也在增加,對系統的穩定性影響越來越 大。對 比 Δ5(s)~Δ7(s)的 曲 線 可 知,當 電 容 和 電阻值不變時,隨著電感實際值與基準值的偏離程度不斷增加,系統相對攝動量 Δ(s)的峰值在增加,峰值點對應的頻率也發生了明顯的變化。對比Δ8(s)~Δ10(s)的 曲 線 可 知,當 電 感 值 和 電 阻 值 不 變時,隨著電容實際值與基準值的偏離程度不斷增加,系統相對攝動量 Δ(s)的峰值隨之增加,峰值點對應的頻率略微發生變化。
選擇權重函數W2(s)時的具體要求:在一定頻率范圍內其數值在最大參數攝動量 Δ(s)之上。經綜合對比,最終確定:

式 中:ω0=18 000;x=0.01。
采用Matlab魯棒控制工具箱求取魯棒控制器。考慮到控制器的實現問題,利用降階函數對控制器進行降階,降階后的魯棒控制器如下[21]:

此外,針對魯棒電壓控制器階數較高所造成系統響應速度慢的問題,本文增加了基于擾動觀測器的負載電流前饋控制環節。
2.3 基于擾動觀測器的負載電流前饋控制
基于擾動觀測器的負載電流前饋控制結構圖如圖6所示。其中:Vref(s)為孤島微網逆變器的參考電壓輸入;Vo(s)為微網逆變器的輸出信號,即負載電壓;G(s)為微網逆變器的實際模型;Gn(s)為 微 網 逆 變 器 的 標 稱 模 型;D(s)為 系 統 的 等 效外部擾動,在本文中主要將負載電流造成的影響視 作 擾 動;ξ(s)為 傳 感 器 噪 聲;Q(s)為 低 通 濾 波器;K(s)為控制系統中電壓環的魯棒控制器。
根據圖6可得不加擾動觀測器時微網逆變器的輸入輸出關系:
其中:
根據圖6可得到加入擾動觀測器后微網逆變器的輸入輸出關系如下:

其中:
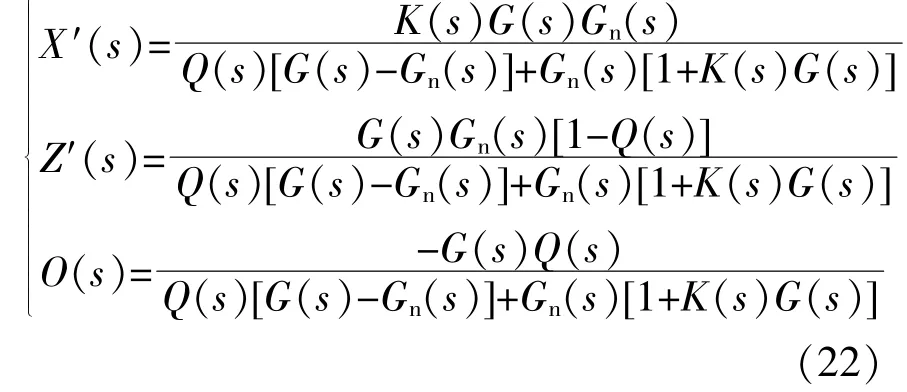
在 式(22)中,當Q(s)=1時,微 網 逆 變 器 的 輸入輸出關系如下:

在 式(22)中,當Q(s)=0時,微 網 逆 變 器 的 輸入輸出關系如下:

式(23)表 明,當Q(s)=1時,微 網 逆 變 器 的 輸出信號不受電流擾動的影響,但是受到傳感器噪聲 的 影 響 更 敏 感。式(24)表 明,當Q(s)=0時,微網逆變器的輸出信號不受傳感器噪聲的影響,但是受到低頻電流擾動的影響。綜上所述,可以將Q(s)設計為低通濾波器,使其在高頻段具有良好的噪聲抑制能力,在低頻段具有對擾動電流的抑制 能 力[22],[23]。
設計低通濾波器的形式如下:
式中:τf為濾波器的時間常數。
為了滿足擾動觀測器在物理上的實現,k與j的關系應滿足k-j>m-l;而且考慮到濾波器的延時問題,k-j的值越小越好[24]。根據微網逆變器系統的特點可知,被控對象為二階系統,可選用二階形式的低通濾波器:

采用帶有擾動觀測器的魯棒雙環控制器,魯棒電壓外環能夠在預設的參數攝動范圍內維持系統的穩定,并保持很小的穩態誤差。這是由于設計魯棒電壓環時選定的權重函數W1(s)為諧振形式。在實際的微網逆變器系統中,當負載切換時,存在因負載切換而產生的電流擾動,通過設定電流擾動觀測器來補償負載電流擾動。
2.4 靈敏度對比分析
微網逆變器系統不加擾動觀測器時,系統的閉環傳遞函數關于濾波電容的對數靈敏度關系為
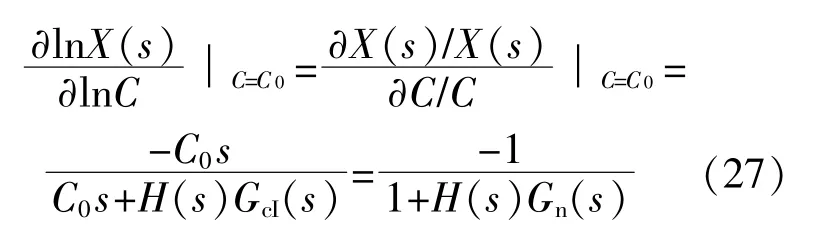
微網逆變器系統加入擾動觀測器時,系統的閉環傳遞函數關于濾波電容的對數靈敏度關系為
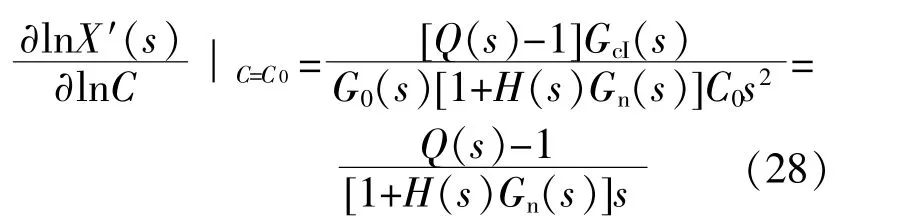
根據式(27)可以畫出不加擾動觀測器時傳遞函數X(s)關于濾波電容的對數靈敏度伯德圖。根據式(28)可以畫出加擾動觀測器后傳遞函數 關于濾波電容的對數靈敏度伯德圖。微網逆變器系統不加擾動觀測器和加擾動觀測器的靈敏度對比如圖7所示。
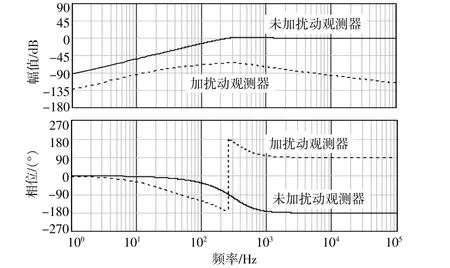
圖7 傳遞函數關于濾波電容的靈敏度伯德圖Fig.7 Bode diagram of transfer function on capacitance sensitivity
由圖7可知,在1 Hz~100 kHz的頻段內,加入擾動觀測器之后的微網逆變器靈敏度幅頻特性曲線向下移動。這表明當濾波電容值發生變化時,系統的傳遞函數受到的影響變小,微網逆變器的抗擾動能力變強。
3 仿真與實驗
為了驗證本文所提出控制策略的真實性和有效性,在Matlab/Simulink環境下對孤島微網逆變器進行仿真,并在2 kVA的逆變器樣機上進行實驗。本文設計的微網逆變器總體結構如圖8所示。
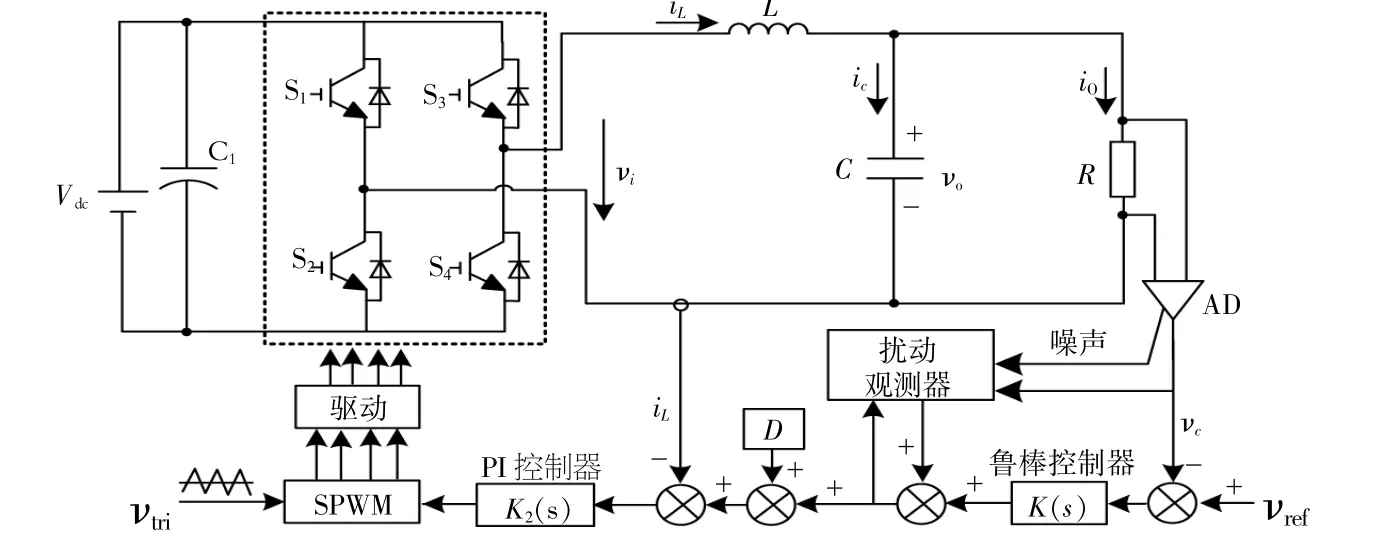
圖8 微網逆變器總體結構圖Fig.8 Overall configuration of inverter in isolated microgrids
逆變器采用帶有LC型濾波器的單相全橋拓撲。全控型器件采用IGBT,直流側電壓由大功率直流電壓源提供。負載電阻采用多個鋁殼式電阻串并聯的方式連接,用空氣開關對負載進行切換。仿真與實驗的主要參數設置如表2所示。
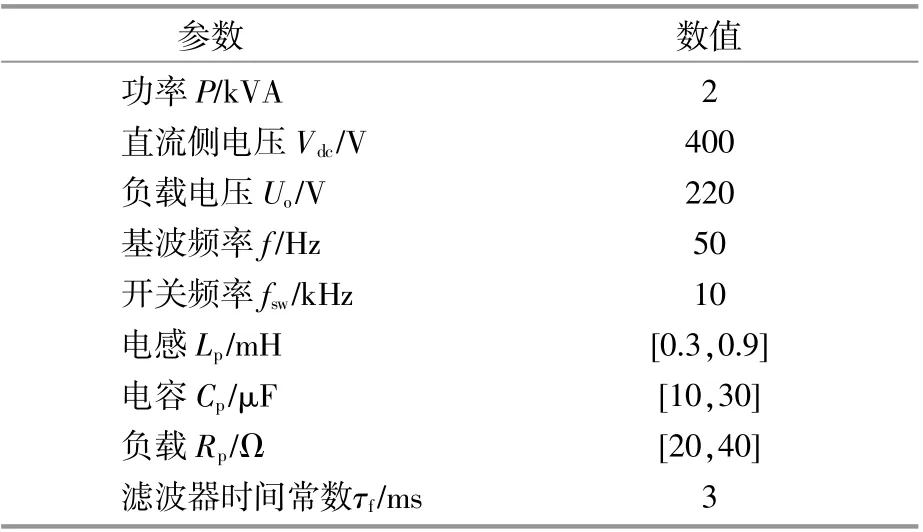
表2 系統參數Table 2 System parameters
3.1 仿真結果與分析
系 統 的 仿 真 結 果 如 圖9所 示。圖9(a)~(c)依次為微網逆變器的電壓環控制器采用PI控制策略、無觀測器魯棒控制策略和有觀測器魯棒控制策略的負載電壓和負載電流波形圖。負載性質為阻感性負載。
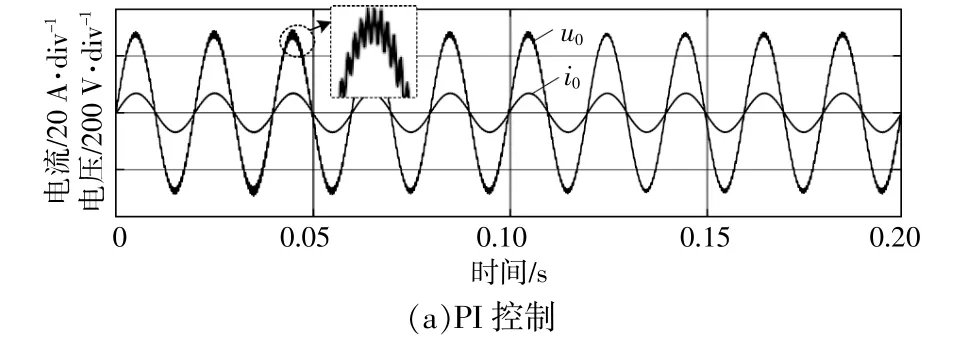
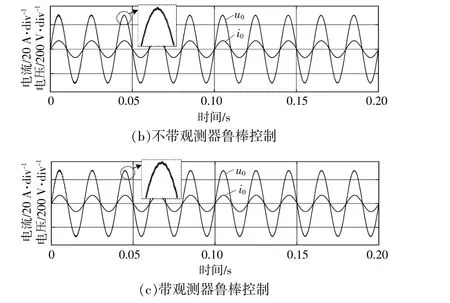
圖9 系統帶阻感性負載時的仿真結果Fig.9 Simulation results with resistive-inductive load
從圖9(a)可見,系統穩態運行時,采用PI控制策略的微網逆變器輸出電壓和電流有較多的諧波,波 形 發 生 畸 變;圖9(b),(c)中 的 逆 變 器 輸 出的電壓和電流幾乎沒有發生波形畸變,波峰位置也相對平滑。通過3個圖的對比可知,帶有魯棒電壓控制器的微網逆變器系統具有更好的穩態性能;觀測器的加入與否對系統的穩態性能沒有影響,不影響系統的穩定運行。
圖10為微網逆變器負載切換時輸出的電壓與 電 流 波 形。圖10(a)~(c)依 次 為 微 網 逆 變 器 的電壓環控制器采用PI控制策略、無觀測器魯棒控制策略和有觀測器魯棒控制策略的負載電壓和負載電流波形圖。負載切換情況:t=0.065 s時,負載由P=1 kW切換至P=2 kW;t=0.125 s時,負載由P=2 kW切換至P=1 kW。
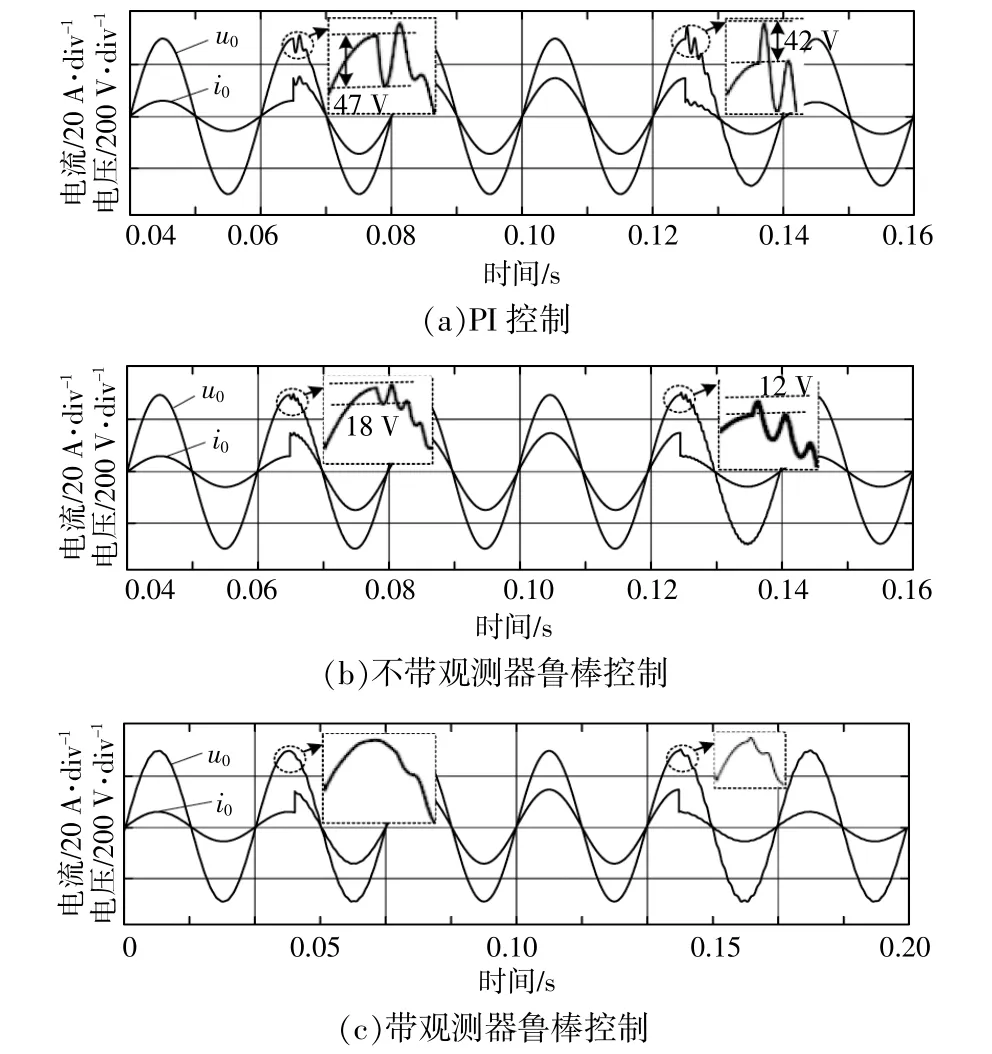
圖10 負載切換時的仿真結果Fig.10 Simulation results with load switching
從圖10(a)可以看出,當負載增加時,采用PI控制策略的微網逆變器輸出電壓跌落明顯,從311 V迅速跌落至260 V左右,跌落幅度接近50 V;在電壓回升階段,電壓波動也表現得較為明顯。當負載功率突然減小時,逆變器輸出的電壓幅值迅速增大,達到350 V,增幅接近40 V,且恢復緩慢。圖10(b)所示的電壓環控制器采用無擾動觀測器的魯棒控制策略,在負載功率增大和減小的過程中,電壓跌落和上升幅度不超過20 V。圖10(c)顯示,當負載切換時,逆變器輸出的電壓波動最小。雖然負載切換對逆變器輸出電壓有一定的影響,但是波峰位置相對平滑,沒有陡升或者陡降 現 象。對 比 圖10(a)~(c)可 見,采 用PI控 制 策略的逆變器在負載擾動抑制方面的表現性能不佳,在負載切換時,其輸出電壓的波動幅度超出20%;采用魯棒控制策略的逆變器在負載切換時,其電壓波動在10%以內,加入擾動觀測器后,逆變器輸出的電壓的波動幅度非常小。這表明擾動觀測器對負載切換產生的擾動具有較好的抑制能力。
3.2 實驗結果與分析
系統帶阻感性負載時的實驗結果如圖11所示。圖11(a),(b)分 別 為 孤 島 微 網 逆 變 器 帶 阻 感性負載時,電壓環控制器采用PI控制策略和帶擾動觀測器的魯棒控制策略下的輸出電壓波形和電流波形。
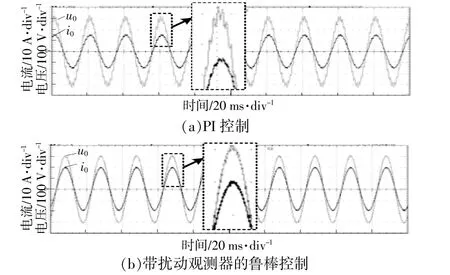
圖11 系統帶阻感性負載時的實驗結果Fig.11 Experimental results with resistive-inductive load
從圖11(a)可以看出,當電壓環控制器采用PI控制策略時,系統的輸出電壓波形波峰位置存在明顯畸變,與圖10(a)的仿真結果一致。采用帶擾動觀測器的魯棒控制策略時,孤島微網逆變器輸出電壓波形變得平滑,波峰位置沒有畸變現象出現,與圖10(c)所對應的仿真結果一致。圖11表明了帶有擾動觀測器的魯棒控制策略能夠提高系統的穩態性能。
圖12給出了多參數攝動時系統的實驗結果。其 中,圖12(a),(b)分 別 為 采 用PI控 制 策 略 和 帶擾動觀測器的魯棒控制策略。
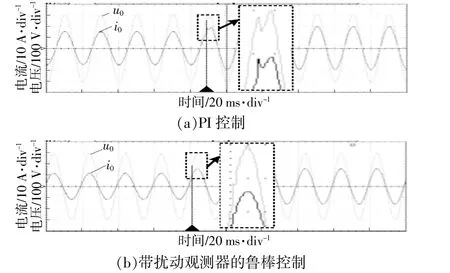
圖12 多參數攝動時系統的實驗結果Fig.12 Simulation results with load variation
該實驗條件是在系統運行過程中改變系統的電容。從圖12中可以看出,當系統的電容參數發生變化時,PI控制下的逆變器輸出電壓發生明顯跌落,而帶有擾動觀測器的魯棒控制下的逆變器輸出電壓波形幾乎沒有發生跌落。這說明帶有擾動觀測器的魯棒控制器對于系統的電容參數變化具有一定的魯棒性;系統對于電容參數變化的靈敏度較小,當電容參數變化時,對系統的穩態性能影響小。
4 結論
本文針對孤島微網逆變器系統的內部參數攝動和負載擾動進行了理論建模。在設計加權函數時,將內部參數攝動和負載擾動的范圍考慮在內;通過混合靈敏度分析法設計魯棒H∞控制器并對其進行降階,實現了對輸出電壓的精確跟蹤。實驗結果表明,當系統發生參數攝動和負載突變時,魯棒H∞控制器仍然能夠維持系統的穩定性,并保持所期望的穩態性能。擾動觀測器可以抑制因負載功率切換而導致的電壓突變,同時也能夠降低系統的輸出電壓對參數攝動的靈敏度,在一定程度上提高了孤島微網逆變器系統的快速性和魯棒性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
