DIS實驗驗證機械能守恒定律
——采用通用軟件進行創(chuàng)新與改進
2021-09-24 03:22:24陳蕾卉劉愛云
物理通報 2021年10期
陳蕾卉 劉愛云 涂 泓
(上海師范大學(xué)數(shù)理學(xué)院 上海 200234)
1 引言
機械能守恒定律是運動學(xué)中的基本定律,同時也是中學(xué)物理課程學(xué)習(xí)的重點內(nèi)容.它反映了在只有重力或彈力做功的物體系統(tǒng)內(nèi),物體系統(tǒng)的動能和勢能之間可以發(fā)生相互轉(zhuǎn)化,但機械能的總能量保持不變這一理論.在傳統(tǒng)的驗證機械能守恒定律的DIS實驗中,通常采用專用軟件進行測量,初速度為零是給定的默認(rèn)實驗條件,并不是實際測量出來的.在實際實驗中,有可能由于初始釋放的位置、人手釋放的不確定性等因素,導(dǎo)致其實驗結(jié)果與初速度為零的實驗計算結(jié)果相差較大.并且,這種初速度及實驗表格都提前為學(xué)生預(yù)備好的做法,并不能鍛煉學(xué)生的物理科學(xué)思維、創(chuàng)造力及思辨能力.本文采用通用軟件的測量方式來進行實驗,讓學(xué)生自行設(shè)計實驗表格,并改進了關(guān)于初速度的測量方式.因此,本文中的以通用軟件來進行實驗相較于傳統(tǒng)的使用專用軟件來說,更加準(zhǔn)確和全面[1,2].
2 實驗裝置簡介
實驗器材:朗威DISLab數(shù)據(jù)采集器、計算機、朗威光電門傳感器、擺錘、細線、鐵架臺、帶刻度的高度板.
實驗裝置如圖1所示.其中光電門傳感器固定在帶刻度的高度板上,接入數(shù)據(jù)采集器中,當(dāng)擺錘經(jīng)過光電門傳感器時,光電門傳感器會實時記錄擺錘經(jīng)過光電門傳感器的時間,計算出此時擺錘的速度[3].

圖1 實驗裝置
3 實驗原理
把一個擺錘由細線懸掛起來,并拉到一定高度.當(dāng)擺錘由靜止開始釋放時,如果忽略空氣阻力,此時擺錘只受到繩子給的拉力和本身所受的重力.根據(jù)擺錘的運動狀態(tài)及受力分析,繩子給擺錘的拉力不做功,此時系統(tǒng)中只有重力做功,動能和勢能之間可以相互轉(zhuǎn)化,符合機械能守恒定律的條件[4].
根據(jù)機械能的定義可知,無論勢能和動能如何變化,兩者之和都等于機械能.則將擺錘經(jīng)過A,B,C,D4點的動能值和勢能值分別對應(yīng)相加,如果得到的4個機械能值,在誤差允許的范圍以內(nèi)基本一致,則可以證明機械能守恒定律成立.
4 實驗過程及實驗結(jié)果
(1)進入朗威通用軟件,設(shè)計表格如表1所示.
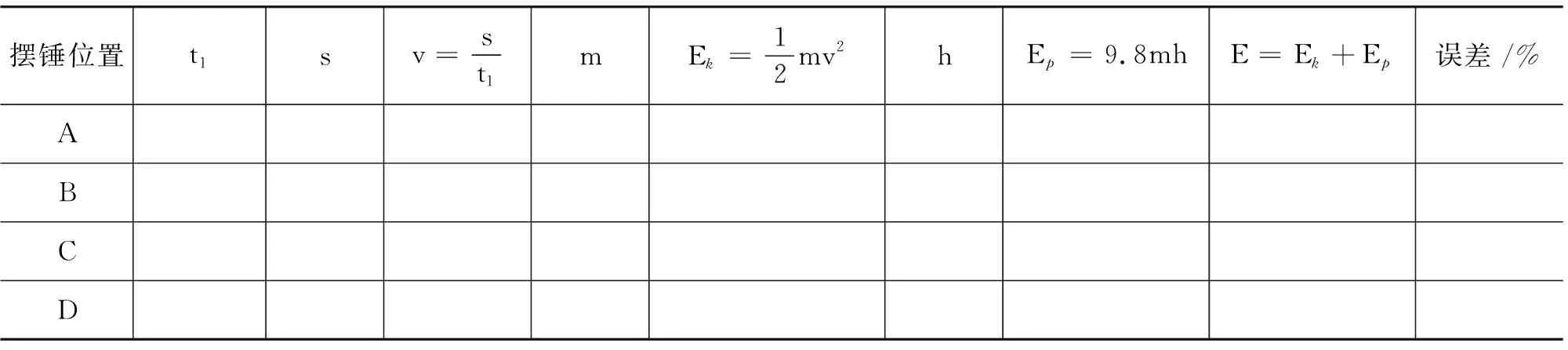
表1 驗證機械能守恒定律設(shè)計表格
(2)測量擺錘直徑s及其質(zhì)量m,以及高度板上P,Q,R點的高度(假定D點高度為零,D點所在水平面為零勢能面),填寫到表格中.
(3)利用測平器精準(zhǔn)完成實驗裝置定位,將擺錘釋放裝置固定到實驗器上的P點,光電門的擋光孔固定在實驗器的A點上.
(4)點擊“開始”,在P點釋放擺錘,擺錘通過光電門傳感器的時間將被記錄在表格中,通過公式計算出擺錘通過A點的速度.
(5)調(diào)整光電門位置分別到B,C,D3點,重復(fù)上述實驗步驟,測得擺錘在3點通過光電門傳感器的時間,通過公式計算出擺錘通過B,C,D3點的速度.
(6)根據(jù)公式計算出A,B,C,D4點上的動能和重力勢能,進而求出A,B,C,D這4點上各自的機械能值,得到結(jié)果如表2所示.
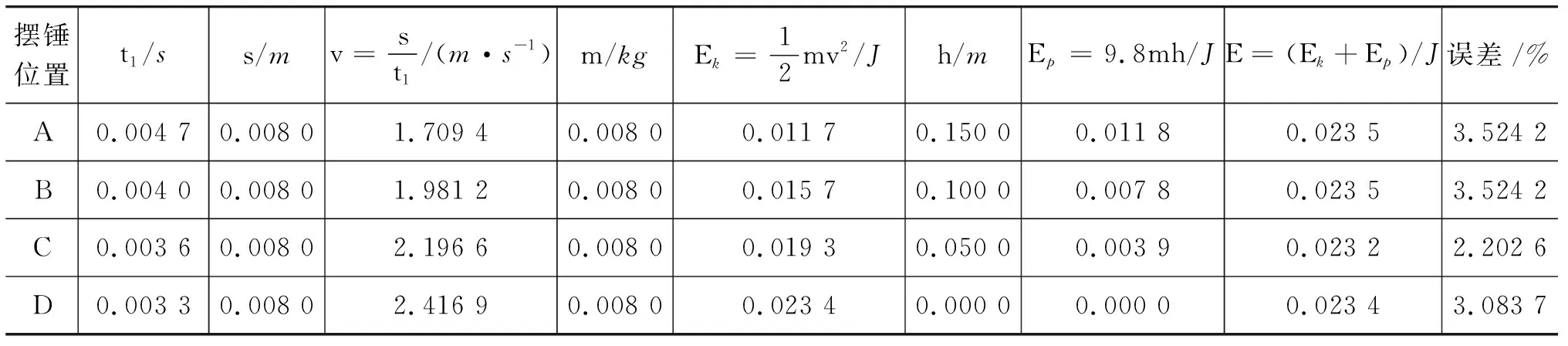
表2 以P點為初始釋放點,驗證機械能守恒定律的測量數(shù)據(jù)
(7)再利用測平器,將擺錘釋放裝置分別固定在Q和R點,重復(fù)上述實驗,得到結(jié)果如表3、4所示.
表3 以Q點為初始釋放點,驗證機械能守恒定律的測量數(shù)據(jù)
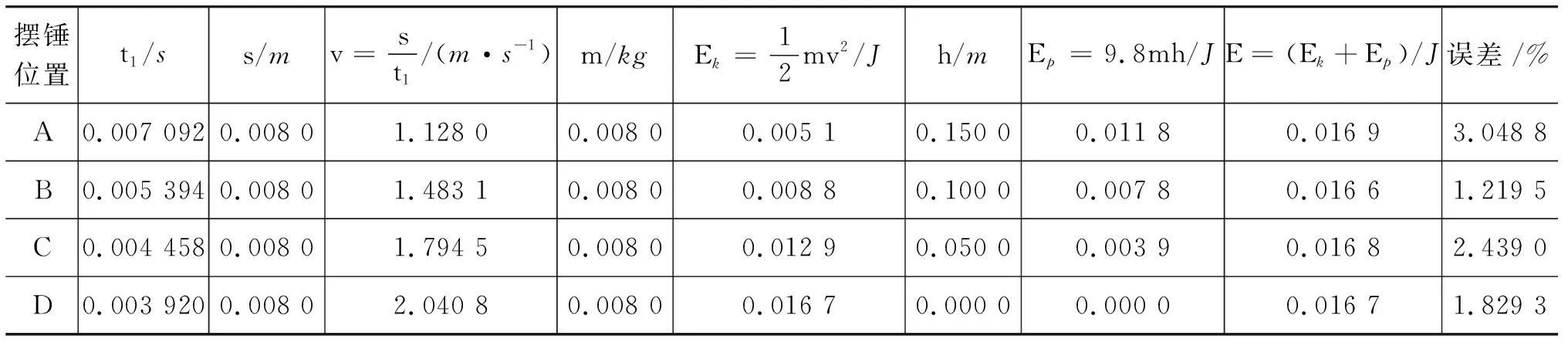
表4 以R點為初始釋放點,驗證機械能守恒定律的測量數(shù)據(jù)
(8)將3組數(shù)據(jù)匯總,繪制成表格如表5所示.
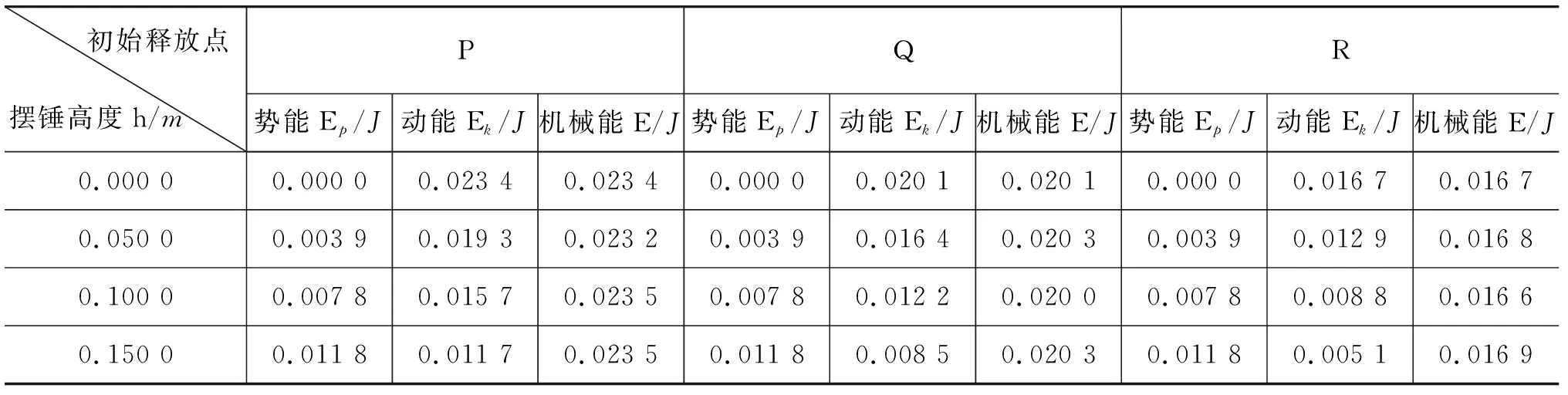
表5 匯總P,Q,R 3點的測量數(shù)據(jù)
(9)將表5的數(shù)據(jù)進行對比,繪制成折線統(tǒng)計圖,如圖2所示.

圖2 P,Q,R 3點的能值變化
5 專用軟件的實驗步驟
(1)測量實驗擺錘的直徑s及其質(zhì)量m,記錄數(shù)據(jù).
(2)利用擺錘釋放裝置在A點靜止釋放擺錘,分別將光電門傳感器固定在測量點D,C,B,測量D,B,C3點上擺錘通過光電門傳感器的速度.
(3)通過“數(shù)據(jù)計算”功能,得到擺錘在A,B,C,D點的動能、勢能和機械能值,如圖3所示.
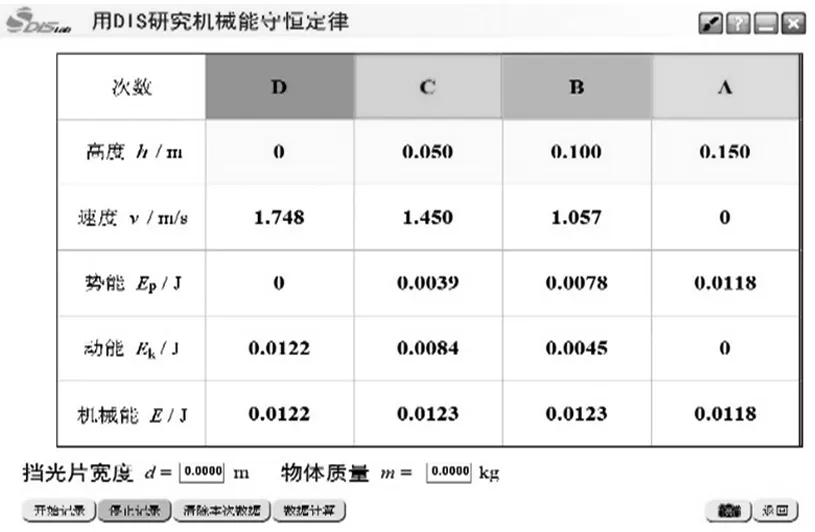
圖3 專用軟件驗證機械能守恒定律的測量數(shù)據(jù)
6 專用軟件與通用軟件的對比 改進原因及優(yōu)勢
6.1 兩種實驗結(jié)果分析
由上述實驗表格可知,利用通用軟件進行實驗測量,其實驗數(shù)據(jù)匯總圖像較為平穩(wěn),各實驗數(shù)據(jù)結(jié)果均在朗威實驗儀器的誤差允許范圍以內(nèi),結(jié)果較為準(zhǔn)確.
從數(shù)據(jù)可以看出,利用專用軟件進行測量,采用初速度為零的實驗條件,則其他實驗結(jié)果很容易與給定初速度的實驗計算結(jié)果出現(xiàn)偏差,造成誤差過大的情況.
6.2 專用軟件與通用軟件的實驗步驟對比
專用軟件采用的實驗方式是將A點作為起始點,并將A點速度為零作為默認(rèn)的已知條件,直接填寫在表格中.之后分別將光電門傳感器放在B,C,D3點,測量出擺錘在B,C,D3點的瞬時速度,以此計算出擺錘在A,B,C,D4點的動能、勢能、機械能之間的關(guān)系,從而驗證機械能守恒定律.
本文中所采用的使用通用軟件設(shè)計實驗表格的測量方法,與原始實驗方式的不同點在于:將初始點分別改變?yōu)榇怪备叨雀哂贏點的P,Q,R3點,且分別在此3點處釋放,使得擺錘在A點的瞬時速度是可被測量的.之后,再分別測量出擺錘在A,B,C,D4點的速度,以此計算4點動能、勢能、機械能之間的關(guān)系.
6.3 改進原因及優(yōu)勢
綜上所述,兩種實驗方式主要的不同點在于:測量軟件的選擇、初始位置點的選擇以及實驗表格的使用上.
在通用軟件中,如果仍然照搬專用軟件的實驗步驟,將光電門傳感器固定在A點,將擺錘由A點靜止釋放,則需要光電門傳感器測量出擺錘在A點速度為零的實驗結(jié)果,此點的數(shù)據(jù)才有意義.但是由于光電門傳感器的工作原理,速度為零的物體實際上并不能引起光電門傳感器進行工作.如果想引起光電門傳感器工作,則必須存在擺錘經(jīng)過光電門的時間,通過計算擺錘的寬度與擺錘經(jīng)過光電門的時間,得出擺錘經(jīng)過此點的速度值,而此速度值并不符合實驗假定的初速度為零這一條件,也同樣不能作為A點速度的計算用值.所以,擺錘在A點速度為零這一數(shù)值是不能被測量出來的.
根據(jù)通用軟件的工作原理,使得測量時并不能直接設(shè)定初始速度值為零.而舍棄測量擺錘在A點的瞬時速度會使得實驗數(shù)據(jù)較少,并不符合物理實驗的嚴(yán)謹(jǐn)性.因此,在選擇通用軟件進行試驗時,我們要進行實驗改進,重新選擇實驗初始點的位置,挑選高于A點的位置作為釋放點,并且挑選P,Q,R3點進行多次實驗,保證了實驗的準(zhǔn)確性和嚴(yán)謹(jǐn)性.
同時,指導(dǎo)學(xué)生采用通用軟件進行測量,并要求學(xué)生自行設(shè)計實驗表格的做法,符合物理的學(xué)科特點.標(biāo)準(zhǔn)的實驗過程應(yīng)該是:在實驗前,指導(dǎo)學(xué)生選擇合適的實驗器材,設(shè)計實驗方案;在實驗過程中,學(xué)生對實驗現(xiàn)象進行觀察和記錄,對數(shù)據(jù)進行測量和讀數(shù);實驗結(jié)束后,學(xué)生自主對數(shù)據(jù)進行處理和分析,并進行反思與評估.
實驗過程是一種培養(yǎng)學(xué)生綜合能力的過程,是對學(xué)生進行創(chuàng)新意識和能力培養(yǎng)的有效途徑.實驗并不是一帆風(fēng)順,有可能出現(xiàn)各種問題和情況,它要求教師不僅要講授學(xué)科基礎(chǔ)知識,還要培養(yǎng)學(xué)生嚴(yán)謹(jǐn)?shù)目茖W(xué)態(tài)度和完備的科學(xué)思維.因此,單純采用實驗過程簡單,實驗操作單一,實驗表格直接給定的專用軟件來進行物理教學(xué),并不能達到物理實驗的學(xué)科要求.
本文采用的實驗方式可以省略需測量A點速度為零的實驗步驟,使得在實驗中每一個觀察點的測量值都是可以被真實地測量到的,保證了實驗結(jié)果的嚴(yán)謹(jǐn)性和準(zhǔn)確性[5].
7 結(jié)束語
通過以上實驗結(jié)果可知,運用的通用軟件實驗方法可以成功驗證機械能守恒定律,其實驗過程力求減少實驗誤差,實驗結(jié)果真實可靠,均在物理實驗所要求的實驗誤差范圍以內(nèi).將傳統(tǒng)的專用軟件實驗方法和通用軟件實驗方法進行比較分析,可以說明本文運用實驗方法的嚴(yán)謹(jǐn)性和全面性,使實驗結(jié)果更具有說服力[6].對于相同的實驗?zāi)康模瑢嶒灧椒ㄍ袔追N,而從中選出最優(yōu)實驗方法,是實驗教學(xué)的重要內(nèi)容.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21