線陣CCD的光學測角嵌入式系統設計研究
2021-09-23 11:09:06徐道際
商品與質量 2021年36期
徐道際
安徽宏實光機電高科有限公司 安徽合肥 230000
在計量科學行業的領域中,角度測量是一種常用的使用方法,通常情況下,技術人員應用獨特的測量技術,引進科學、安全的測量設備,進而獲取重要的物理角度參數。在CCD技術不斷的發展過程中,CCD器件及激光器的誕生,在各行各業中受到了廣大人民群眾的喜愛。筆者以TSL1401和LPC2138為主要研究對象,進而建立健全完整的嵌入式測量系統,并應用CCD的光電轉換性能,同時結合光學測角方法,提升測量角度信息的準確性,使得CCD技術朝著自動、智能的方向發展。
1 線陣CCD角度測量原理分析
透射式成像系統是測角系統的重要組成部分,測量人員利用透明的光線將其映射在被測物體上,使得圖像在線陣CCD上[1]。其中,被測物體的垂直軸線和線陣CCD的單元陣列有機的結合起來,此處將線陣CCD的成像像元寬度設定為D,一旦旋轉物體產生一定角度α,在CCD一列上的成像像元寬度值也會改變成為S。具體情況如圖1所示,經過相關人員的不斷推導,得出了如下計算公式,即 )/(sin1SD-=α。
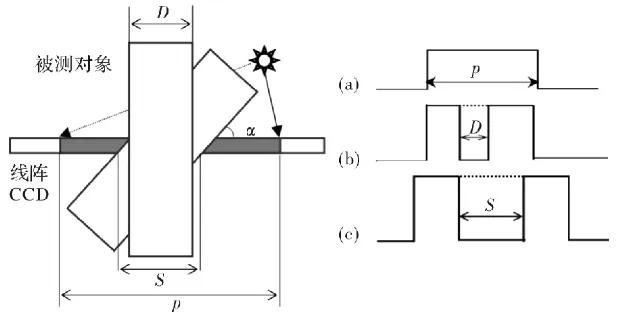
圖1 線陣CCD角度測量原理
按照測試的流程和工作原理,相關人員通過像元擋光技術方法實現了對角度的測量和分析。如上圖所示,線陣CCD在經過一系列的二值化處理后,產生了不同形狀的輸出波形,即上圖的(a)、(b)、(C),如果被測量的物體沒有經過遮光阻擋,不會使其形成一個標準的方波信號,此時物體的寬度和低電平的像元寬度大體吻合,因為像元寬度的不同使得物體旋轉角度的前后遮光現象也有所差異。
為了提升測試系統的整體測試效果,實際的測量過程中,應全面對線陣CCD之中放入沒有被遮光阻擋的測試物件進行處理,經過初步的計量,將測試系統計算感光的像素個數設定為P,主要表現為上圖(a)所示;如圖(b)所示,其代表光源、LLD對被測物體在垂直感光下得出的像素個數,如果被測物體的旋轉角度固定在一個位置后,在測量人員周密的分析之下,測量系統的感光像素個數以數值m為代表,如圖(c)所示。一般情況下,被測物體的寬度和感光像素的數量存在一定的聯系,根據全面的計算分析之后,被測物體的傾斜角度可以表示為:
2 線陣CCD角度測量系統分析
2.1 角度測量系統分析
如圖2所示,為詳細的角度測量系統構成分析圖。
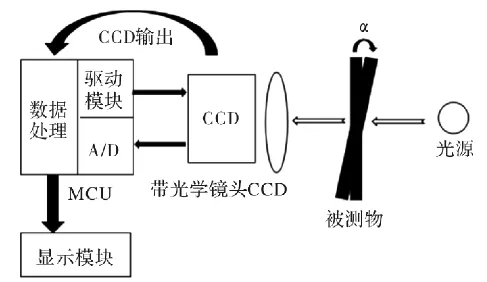
圖2 角度測量系統總體構成圖
CCD驅動模塊、角度模塊、A/D數據采集模塊數據處理模塊及顯示模塊是角度測量系統的重要組成部分。為了保證角度測量系統中信號采集的精確度,防止信號失真情況的出現,光路模塊可以給根據一定的測量技術方導軌上搭建完整的元件,從而更好的設定光相關結構;與此同時,信號電壓峰值和CCD的光照度有所不同,在工作人員進行基礎的信號采集期間,CCD線陣中心和具體得到的信號有著很大的差距,應在周密分析的基礎上,設定科學合理的光路標定數值,進而獲取準確的信號。另外,一旦在測量系統中將被測的物體垂直放置,方可測試得出信號負輸出的整體幅度,經過與實際尺寸和CCD采集測試物體的尺寸對比分析,測量得出光學系統的放大倍率數值,便于更好的設定光路數值[2];CCD驅動模塊主要可以實時的進行ccn提供時鐘、轉移柵、復位柵脈沖信號傳輸,并更好的進行二值化電路提供相關數據信息;與此同時,CCD信號采集模塊可以利用MCU軟件對系統內部結構域進行高低電平的采集,并完整的儲存在MCU軟件中;最后,系統開發人員利用先進的處理技術,構建合理的數據處理模塊系統,對成像形態及時的處理和判斷,從而方便測量人員進行角度分析測試。
2.2 硬件設計
此處所敘述的硬件管理系統主要以LPC2138芯片為主要核心運行軟件,進而建立科學的嵌入式系統,結合線陣CCD的TSL401CL角度測量傳感器,并輔以MCU處理技術軟件,在產生各類信號啟動的同時,讀取被測物體的數據信息,進而完成線陣CCD的角度測量工作。其中,經過不斷的開發和實踐,研制出了含有16/32位的ARM7TDMI-SCPU的LPC2138微控制器,在128位存儲寬度和加速構件的有機協調、配合之下,使得存儲器的接口在32位代碼同時運行之下,確保最大時鐘速率的平穩運行,在相關系統模式架構中,主要包含16路模擬輸入和兩個8路10位的A/D轉換器,研發人員在應用相關處理技術,對較大范圍的通信串口接口和32kb片內SRAM進行調整,從而將其廣泛的應用在通信網關、微型控制、協議轉換、語音識別行業,為提高工業領域的實驗研究和測量工作創造諸多有利條件。
另外,在不斷的完善和改進過程中,研究人員開發了含有128*1傳感器的單元單色線陣CCD,即TSL14010CL軟件,主要停止時間并負責集成像素的采集處理工作,該種陣列主要包含128個主要像素,每個像素之間的間隔不超過8.2mm,在保證高線性度完整和均勻度合理的情況下,確保整體動態范圍為4005:1。此種陣列模式的運行系統必備的基礎條件相對簡單,使用5V電壓就可以確保其正常運行,并且此種控制模式下的操作具有極強的邏輯性,通過時鐘CLK和串行輸入端的相關信號就可以進行規范操作。具體運行情況如圖3所示。
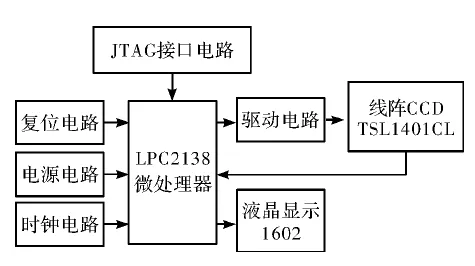
圖3 TSL14010CL軟件的執行圖
為了保證線陣CCD時鐘操作時序的規范性和正確性,應在確定最小時間的同時,使得SI前置低平電在下一個時鐘的上升之后進行。在運行過程期間,會產生一系列的hold信號,經過相應處理,傳送到模擬開關的像素內部結構之中,進一步確保傳送的信號和積分電路中的128個像素隔離,最后促使積分器處于復位狀態。值得注意的是,在移位寄存器的相應處理之下,SI的脈沖時鐘也會進行位移,進而保證電荷耦合放大器中的存儲采樣電容相互進行連接,最后產生相應的模擬放大輸出AO,詳情如圖4所示[3]。
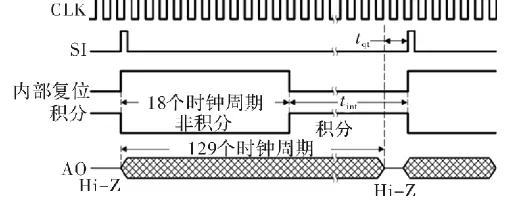
圖4 驅動時序波形圖
3 系統調試及結果
實驗人員根據具體的實驗操作,結合線陣CCD的驅動時序要求,并利用MCU處理軟件進行驅動程序分析和處理,從而完成CCD驅動處理工作。本文通過LPC2138芯片的p0.1和P0.0進而產生SI時序信號和CLK,在緊密結合CCD輸出信號并通過示波器驅動信號觀察,滿足了CCD的實際運行需求,進而快速的完成信號輸出成像處理工作。具體結果如圖5所示。

圖5 CCD驅動信號及輸出信號波形圖
在角度測量準備工作期間,工作人員結合操作系統的性能對相關光路進行標定處理,且在CCD和光源之間不擺放任何物體,在不斷調整光路的同時,根據MCU處理軟件的成像信號進而計算感光像素數量,當垂直放置CCD和光源之間的旋轉角度,并收集、獲取相應測量角度數值,最后確保旋轉角度和顯示角度一致。
4 結語
總而言之,線陣CCD測量系統已經在二值化處理、角度測量方案設計以及數據采集測量電路中被普遍推廣和應用。但是受到外界客觀因素的影響,也暴露了諸多不良現象,如像元個數測量范圍被約束、必須在光路校準情況下進行操作等。因此,光路設計的開發人員應積極學習國內外先進的線陣CCD光學處理技術,并樹立自主創新的思想,在因地制宜、統籌規劃的基礎上,促進測量角度等工作可以順利開展。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
