無人機大比例尺成圖數(shù)據(jù)精度驗證
2021-09-18 03:29:24于東海任旭斌
礦山測量 2021年4期
于東海 ,任旭斌
(1.甘肅省測繪工程院,甘肅 蘭州 730000;2.甘肅省應(yīng)急測繪工程研究中心,甘肅 蘭州 730000)
隨著無人機(Unmanned Aerial Vehicle,UAV)航空攝影測量技術(shù)[1-2]的日趨成熟,由起初僅依靠航攝相機獲取的像片來生產(chǎn)數(shù)字正射影像 (Digital Orthophoto Map,DOM),發(fā)展到如今搭載多鏡頭傾斜相機和激光雷達等設(shè)備獲取多源數(shù)據(jù)來生產(chǎn)實景三維模型[3-5]和數(shù)字表面模型(Digital Surface Model,DSM),現(xiàn)代測繪對無人機航攝要求的深度和廣度正在逐漸提高[6-8]。
無人機航攝系統(tǒng)能夠快速高效的獲取目標(biāo)區(qū)域的航空影像,且機載定位定姿系統(tǒng)(Position and Orientation System,POS)能記錄攝影瞬間的影像外方位元素,實現(xiàn)了在無需或少量像控點情況下的成圖數(shù)據(jù)生產(chǎn)[9-12]。朱進等[13]提出了一種能夠有效減少像控點數(shù)量的無人機航測布點方案;張純斌等[14]分析了小型消費級無人機在不同航高下獲取地形數(shù)據(jù)的誤差變化;萬劍華等[15]研究了像控點數(shù)量與分布和無人機航測成果質(zhì)量之間的關(guān)系。已有研究只針對影響無人機航測成果的單一因素進行分析,而對于不同比例尺的不同空三加密方式如何影響成圖數(shù)據(jù)精度,卻鮮有研究。
無人機航測技術(shù)為大比例尺成圖數(shù)據(jù)的生產(chǎn)提供了高效快捷的新途徑。本文以無人機航攝系統(tǒng)為平臺,獲取實驗區(qū)1:2 000、1:1 000和1:500三種成圖比例尺的航攝數(shù)據(jù),進行有像控點和無像控點兩種空三加密處理,并對生產(chǎn)的DOM和DSM進行精度檢驗,旨在為利用無人機航測生產(chǎn)大比例尺成圖數(shù)據(jù)提供參考依據(jù)。
1 研究方法
1.1 總體路線
如圖1所示,本文以無人機航攝系統(tǒng)為平臺,獲取實驗區(qū)1:2 000、1:1 000和1:500三種成圖比例尺的航攝數(shù)據(jù),分別采用有像控點和無像控點的空三加密方式(以下簡稱“有控”和“無控”)進行處理,并利用實測檢查點對生產(chǎn)的六組DOM和DSM進行精度檢驗,分析平面和高程中誤差的分布范圍及變化規(guī)律。
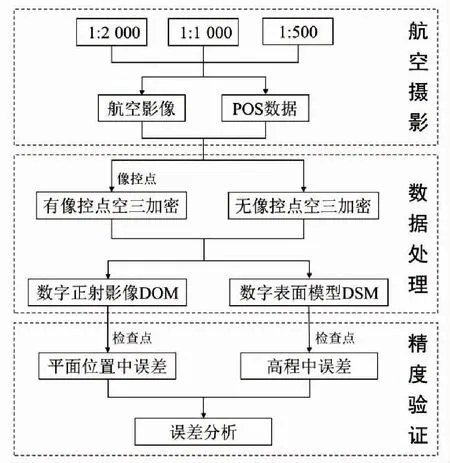
圖1 研究方法示意圖
1.2 實驗設(shè)計
為分析1:2 000、1:1 000和1:500三種比例尺的成圖數(shù)據(jù)精度,分別設(shè)計Ⅰ號、Ⅱ號、Ⅲ號實驗航線。設(shè)計原則為:
(1)統(tǒng)一的重疊率。由于無人機抗風(fēng)能力和相機像幅等因素的限制,為保證所獲取影像不出現(xiàn)漏洞,將航向重疊率設(shè)為75%,旁向重疊率設(shè)置為65%;
(2)航線必須完全覆蓋測設(shè)的像控點,并保證像控點位于相鄰航線中線附近;
(3)按照設(shè)計航高所獲取的影像地面分辨率必須滿足各成圖比例尺的相應(yīng)要求[16],即1:2 000優(yōu)于0.2 m,1:1 000優(yōu)于0.1 m,1:500優(yōu)于0.05 m;
(4)在確保飛行安全的前提下,兼顧時效性和經(jīng)濟性。
實驗航線設(shè)計參數(shù)如表1所示,其中,Ⅱ號航線設(shè)計如圖2所示。
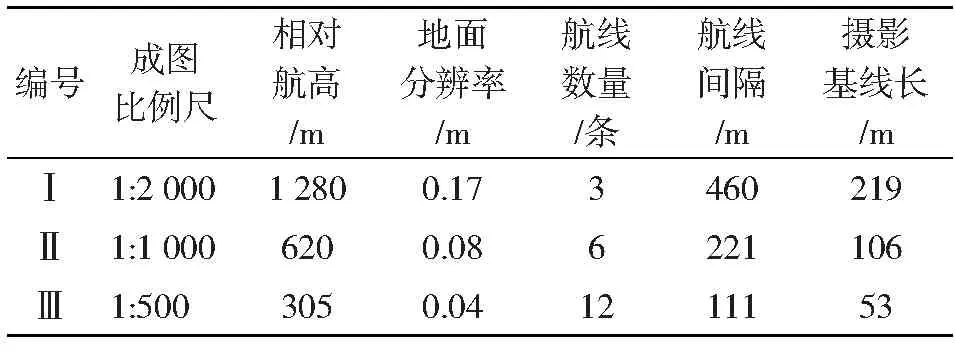
表1 實驗航線設(shè)計參數(shù)

圖2 Ⅱ號航線設(shè)計圖
2 實驗與分析
2.1 無人機數(shù)據(jù)獲取
2.1.1 實驗區(qū)概況
實驗區(qū)位于蘭州市七里河區(qū)黃峪鄉(xiāng)西北部,為面積約5 km2的矩形區(qū)域,地理坐標(biāo)為東經(jīng)103°42′07″、北緯36°01′10″,平均海拔約1 850 m,為黃土丘陵地形,內(nèi)含居民地、道路、農(nóng)田等地物類型。視野開闊無障礙物,衛(wèi)星信號強,適合無人機飛行作業(yè)。
2.1.2 航攝平臺
數(shù)據(jù)獲取平臺為JOUAV CW-007無人機航攝系統(tǒng),由無人機、地面控制站、基站三部分組成。其中,無人機采用電動復(fù)合翼(固定翼+四旋翼)布局形式,集成POS系統(tǒng)和經(jīng)過檢校的SONY-α7rⅡ數(shù)碼相機,具有航時長、速度快和垂直起降的特點,適合復(fù)雜地形的航攝飛行。無人機及相機的基本參數(shù)如表2所示。作業(yè)時,地面控制站和基站、無人機通過無線鏈路相互連接,完成航線規(guī)劃、飛前檢查、起飛降落、任務(wù)執(zhí)行等動作指令。

表2 無人機及相機的基本參數(shù)
2.1.3 航攝執(zhí)飛
數(shù)據(jù)獲取時間為2019年9月20日,天氣晴朗、風(fēng)力2~3級。通過實地踏勘,選取位于實驗區(qū)南側(cè)四周空曠的農(nóng)田作為臨時起降點進行航空攝影。
航攝流程包括:(1)組裝無人機,并架設(shè)基站和地面控制站,保持三者數(shù)據(jù)鏈路暢通;(2)設(shè)置起降點基準(zhǔn)高程,并依據(jù)實際地形對航線進行微調(diào);(3)上傳航線至飛控,并檢核航高、攝影基線、重疊率等參數(shù)設(shè)置是否正確;(4)進行飛前檢查,主要包括發(fā)動機、舵機、相機等硬件是否正常工作;(5)執(zhí)飛,通過地面控制站實時監(jiān)控飛機飛行狀態(tài)和相機曝光狀態(tài),完成航攝任務(wù)后按既定降落航線實施降落;(6)導(dǎo)出航攝影像并下載機載數(shù)據(jù)和基站數(shù)據(jù)后,進行數(shù)據(jù)檢查。
按上述流程獲取實驗區(qū)航空影像數(shù)據(jù),Ⅰ號、Ⅱ號、Ⅲ號航線各飛行一個架次,分別獲取47張、196張、725張有效航空影像及其相應(yīng)的機載和基站數(shù)據(jù)。
2.2 像控點測設(shè)
采用白灰涂灑的方式在實驗區(qū)內(nèi)按“四角+中心控制”方案布設(shè)5個像控點,即區(qū)域四個角點附近和中心點附近各測設(shè)一個像控點。選取50個均勻遍布的明顯地物特征點(如道路標(biāo)識線、廣場鋪磚等)作為檢查點。像控點和檢查點均為平高點,使用Trimble R4儀器采用基于GSCORS系統(tǒng)的網(wǎng)絡(luò)RTK方式測量各點坐標(biāo)(坐標(biāo)系為CGCS2000和大地高)。像控點樣式和效果如圖3所示。
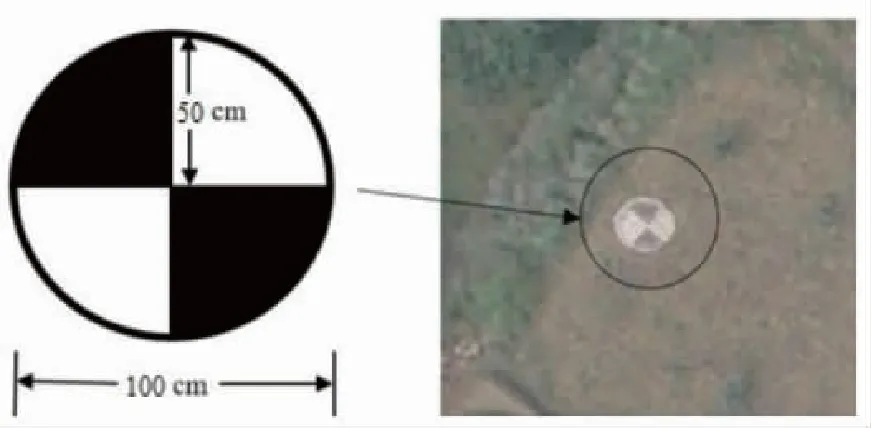
圖3 像控點樣式圖
2.3 數(shù)據(jù)處理
2.3.1 POS數(shù)據(jù)解算
JOUAV CW-007無人機航攝系統(tǒng)在作業(yè)過程中,無人機通過機載POS系統(tǒng)記錄飛行姿態(tài)數(shù)據(jù)“Photo”和流動差分?jǐn)?shù)據(jù) “Rover”,基站記錄固定差分?jǐn)?shù)據(jù)“Base”。通過配套的JoPPS后差分解算軟件,結(jié)合實測的基站點坐標(biāo)和飛機天線偏心分量(X′=-1.031 m,Y′=0 m,Z′=-0.199 m)解算航攝飛行的POS數(shù)據(jù)。經(jīng)檢查,Ⅰ號、Ⅱ號、Ⅲ號航線的POS數(shù)據(jù)解算固定解率均為100%,可直接用作后續(xù)使用。所得POS數(shù)據(jù)包含每個攝站點的坐標(biāo)X值、Y值、Z值和瞬時姿態(tài)角度φ值、ω值、κ值。
2.3.2 空三加密
對實驗獲取的航空影像按照兩種方式進行空三加密處理:(1)有控處理,即將實測的5個像控點和POS數(shù)據(jù)同時作為光束法區(qū)域網(wǎng)平差的約束條件進行處理。(2)無控處理,即僅利用POS數(shù)據(jù)作為光束法區(qū)域網(wǎng)平差的約束條件進行處理。
使用Agisoft Photoscan攝影測量軟件進行空三加密。處理時,軟件中同一階段的參數(shù)必須設(shè)置相同,以確保所有數(shù)據(jù)處理過程的一致性。關(guān)鍵參數(shù)設(shè)置為:“Align Photos”選項中的“Accuracy”參數(shù)設(shè)置為“High”,此參數(shù)決定影像自動匹配連接點的精度;“Build Dense Cloud”選項中的“Quality”設(shè)置為“High”,此參數(shù)決定同名像點匹配點云的密度;其余選項參數(shù)均保持默認(rèn)。此外,在有控處理時,將像控點逐一手動精確調(diào)整至影像對應(yīng)位置后,須再進行“Optimize Camera Alignment”優(yōu)化。
對航攝數(shù)據(jù)分別按上述方式進行處理,輸出空三加密結(jié)果,并依次編號為Ⅰ-1、Ⅰ-2、Ⅱ-1、Ⅱ-2、Ⅲ-1、Ⅲ-2,其中,“1”代表有控處理,“2”代表無控處理。
2.3.3 數(shù)據(jù)生產(chǎn)
以空三加密結(jié)果為基礎(chǔ),在Agisoft Photoscan軟件中分別生產(chǎn)六組DOM和DSM成圖數(shù)據(jù)。以Ⅱ-1組為例,生產(chǎn)的數(shù)據(jù)如圖4所示。

圖4 Ⅱ-1組成圖數(shù)據(jù)
3 精度驗證
3.1 評定標(biāo)準(zhǔn)
以中誤差作為衡量數(shù)據(jù)精度的指標(biāo),中誤差越小,精度越高,中誤差越大,精度越低。依據(jù)現(xiàn)行規(guī)范[16-17]要求,結(jié)合實驗區(qū)的實際地形,選用如表3所示的技術(shù)指標(biāo)作為各比例尺成圖數(shù)據(jù)的平面和高程精度標(biāo)準(zhǔn)。

表3 精度評價標(biāo)準(zhǔn)
3.2 誤差計算
對六組數(shù)據(jù)分別進行精度檢驗。以檢查點的實測坐標(biāo)為真值,對DOM和DSM中對應(yīng)點的圖解坐標(biāo)進行對比分析,計算平面位置中誤差和高程中誤差。計算公式為:
(1)
(2)
(3)
(4)

3.3 誤差分布
按式(1)和式(2)分別計算六組數(shù)據(jù)的平面誤差距離Δsi和高程誤差距離Δhi。為清晰直觀的反映平面和高程誤差距離的整體情況,將計算結(jié)果按遞增順序排列繪制如圖5所示的誤差距離分布圖。

圖5 誤差距離分布圖
圖5(a)中,有控處理生產(chǎn)的Ⅰ-1組、Ⅱ-1組和Ⅲ-1組的平面誤差距離為0.081 ~0.231 m、0.046 ~0.161 m和0.022 ~0.107 m,平面誤差距離整體較小,其各自曲線均波動微小,說明有控處理的DOM平面精度較高且分布均勻;無控處理生產(chǎn)的Ⅰ-2組、Ⅱ-2組和Ⅲ-2組的平面誤差距離為0.309 ~0.830 m、0.208 ~0.627 m和0.154 ~0.398 m,平面誤差距離整體較大,其各自曲線均波動明顯,說明無控處理的DOM平面精度較低且分布不均勻。
圖5(b)中,Ⅰ-1組、Ⅱ-1組和Ⅲ-1組的高程誤差距離為0.020~0.565 m、0.027~0.387 m和0.027~0.265 m,Ⅰ-2組、Ⅱ-2組和Ⅲ-2組的高程誤差距離為1.374~1.945 m、0.986~1.551 m和0.491~1.426 m。可知,無控處理的DSM高程誤差距離明顯較大,且曲線走勢分散、波動顯著,說明其高程精度分布不均勻、可靠性較低。
綜上,隨著成圖比例尺增大,影像地面分辨率提高,平面和高程距離誤差整體呈減小趨勢,有控處理的精度明顯高于無控處理的精度。
3.4 結(jié)果分析
根據(jù)計算所得的檢查點Δsi值和Δhi值,按式(3)和式(4)分別計算六組數(shù)據(jù)的平面位置中誤差ΔS和高程中誤差ΔH,計算結(jié)果如表4所示。

表4 成圖數(shù)據(jù)中誤差計算結(jié)果
由表4可知,滿足1:2 000成圖比例尺的Ⅰ-1組和Ⅰ-2組的平面位置中誤差為0.161 m和0.571 m,高程中誤差為0.322 m和1.693 m(>0.5 m,超標(biāo));滿足1:1 000成圖比例尺的Ⅱ-1組和Ⅱ-2組的平面位置中誤差為0.104 m和0.444 m,高程中誤差為0.221 m和1.325 m(>0.5 m,超標(biāo));滿足1:500成圖比例尺的Ⅲ-1組和Ⅲ-2組的平面位置中誤差為0.057 m和0.275 m,高程中誤差為0.142 m和1.122 m(>0.4 m,超標(biāo))。
可見,有控處理的DOM和DSM的平面和高程中誤差均滿足各比例尺成圖數(shù)據(jù)的精度要求,無控處理的DOM平面位置中誤差略小于精度要求,而DSM高程中誤差超出精度要求約3倍。說明,成圖比例尺一定時,有控處理的中誤差小于無控處理結(jié)果,且滿足精度要求;成圖比例尺變大時,無論是有控處理還是無控處理,其平面和高程中誤差均逐漸減小。
綜上,有控處理可用于生產(chǎn)完全符合不同成圖比例尺精度要求的DOM和DSM,可供大比例尺地形圖測繪更新等定量和定性分析使用,而無控處理只可用于生產(chǎn)剛好滿足平面精度要求的DOM,其DSM僅供地形走勢等定性分析決策使用。因此,在實際項目中,可根據(jù)不同的測繪任務(wù)需求,選取恰當(dāng)?shù)某蓤D比例尺和空三加密方式生產(chǎn)所需數(shù)據(jù)。
4 結(jié)論與討論
通過對無人機航測獲取的實驗區(qū)1:2 000、1:1 000和1:500三種比例尺的成圖數(shù)據(jù)進行精度分析,結(jié)果表明:(1)采用有控處理的不同比例尺的DOM和DSM的平面和高程中誤差完全滿足精度要求,且有控處理的整體精度明顯高于無控處理結(jié)果;(2)隨著成圖比例尺的變大,兩種空三加密生產(chǎn)的DSM和DOM的平面和高程中誤差均逐漸減小,即成圖比例尺大小與精度高低成正比。因此,可根據(jù)實際需求,以“按需分精度測繪”為原則生產(chǎn)不同級別的成圖數(shù)據(jù)。
由于受無人機自身固件的約束,只以單一丘陵地形的小范圍區(qū)域為實驗對象,分析不同比例尺的不同空三加密方式對成圖數(shù)據(jù)精度的影響,而對于復(fù)雜地形的大范圍測區(qū)分析,有待進一步研究驗證。
