京張高鐵隧道智能建造技術
2021-09-17 01:02:48劉建友
隧道建設(中英文) 2021年8期
呂 剛,劉建友,趙 勇,岳 嶺
(1. 中鐵工程設計咨詢集團有限公司,北京 100055; 2. 川藏鐵路有限公司, 四川 成都 610045)
0 引言
鐵路作為重要的交通基礎設施,是一個國家綜合運輸體系的骨干力量,在傳統制造業向工業4.0時代升級轉型的大背景下[1-5],建設高效、綠色、智能化、信息化的鐵路工程已成為鐵路運輸行業發展的必然趨勢[6]。
2019年12月30日全球首條智能化高速鐵路京張高鐵正式開通運行,京張高鐵作為2022年北京冬奧會的交通保障線,促進京津冀地區一體化協同發展的經濟服務線,中國高鐵建設的示范線,在建造過程中充分發揚“智能京張,綠色京張”理念,應用多項智能化關鍵技術[7-11],保障了京張高鐵的順利開通。
智能建造技術是當今隧道研究的熱點,也是今后發展的方向[12]。隨著我國川藏鐵路的開工建設,受高原缺氧、高寒凍土等因素的影響,同時我國勞動力高齡化并急劇減少,隧道智能化建造成為必然選擇。本文將系統地介紹京張高鐵隧道建設過程中多項智能建造關鍵技術的原理、核心技術及應用效果,可為川藏鐵路等隧道工程的建設提供參考。
1 清華園隧道軌下結構智能拼裝技術
目前大直徑盾構鐵路隧道軌下結構常用的結構形式有全部現澆與部分預制、部分現澆2種,但軌下結構采用全預制構件拼裝的施工方法尚屬空白。清華園隧道的支護結構、軌下結構和附屬溝槽均進行預制機械化拼裝建造,在國內首次實現了隧道結構全預制拼裝施工[13],并針對隧道結構特點,研制了機械化自動拼裝機器人,實現了隧道軌下結構建造的標準化、自動化、專業化、智能化,加快了施工進度,節約了工期,避免了大量植筋損壞盾構管片,提高了結構耐久性和可靠性,減少了外界環境對施工作業的干擾,改善了作業環境,降低了振動對周邊環境的影響。盾構隧道軌下結構全預制工藝,由于其具有施工靈活、效率高等特點,取得了顯著的經濟效益和社會效益,是國內盾構隧道軌下結構施工的革命性創舉。
1.1 軌下結構智能化拼裝的控制原理
軌下結構由1個中箱涵和2個邊箱涵組成,其拼裝智能化的關鍵在于拼裝機器人的研發。拼裝機器人主要由車架、行走車輪組、小車供電、橫移機構、平衡機構、旋轉機構、U型吊具、箱涵件調整定位機構等組成。隧道箱涵預制件拼裝機如圖1所示。該設備可以將箱涵件從運輸車吊起,并平移調整后放到指定安裝位置,最終將箱涵件精確安裝于隧道內,實現箱涵快速機械化拼裝。
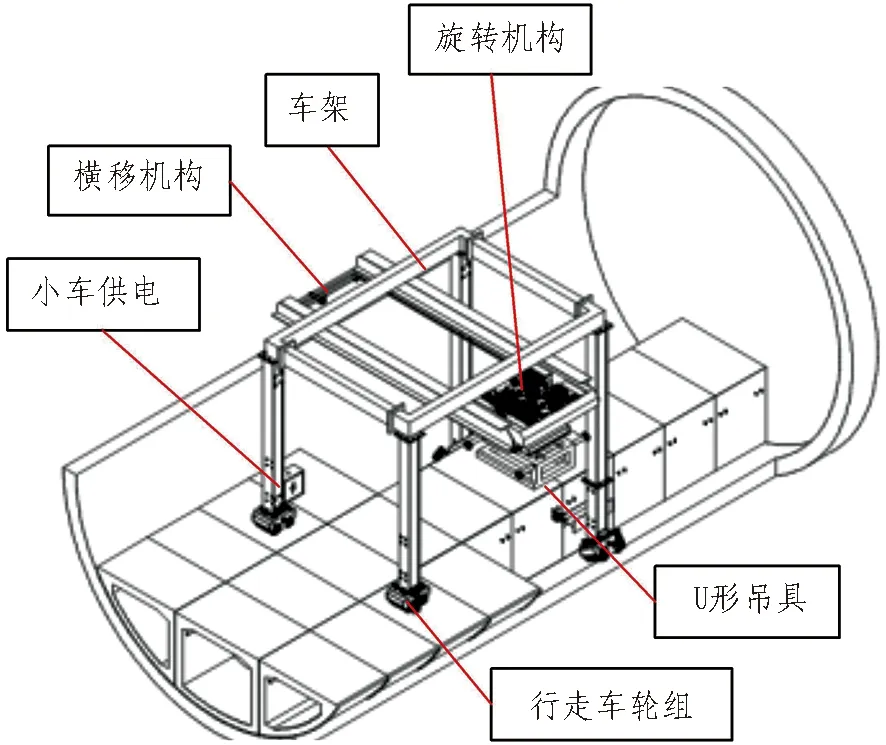
圖1 隧道箱涵預制件拼裝機
箱涵件調整定位機構采用2D/3D機器視覺定位技術,通過攝像機采集視覺圖像,并傳輸給中央控制系統進行圖像識別分析、利用逆運動學求解得到箱涵位置誤差值,并調整箱涵的位置和姿態位姿,消除誤差,實現精準定位和調整。
1.2 拼裝精度控制
軌下結構拼裝時先拼裝中箱涵,之后拼裝兩側邊箱涵。由于邊箱涵構件與中箱涵采用螺栓連接,其定位以中箱涵為基準,不再單獨進行放樣,整體拼裝精度控制為5 mm以內。當各構件之間螺栓連接并緊固完畢后,即完成整個構件拼裝工序。拼裝完成后進行嵌縫施工,將箱涵之間的空隙堵住形成密閉空間,然后對預制結構與盾構管片之間的空隙采用M10微膨脹水泥砂漿充填,最后對底部結構進行監測。主要監測內容為構件內部應力應變和構件整體性的位移,包括沉降及沿弧面滑移。
清華園隧道軌下結構拼裝時,為了加快拼裝進度,中箱涵隨盾構掘進先拼裝,而邊箱涵滯后很長時間才開始拼裝,這種先后拼裝的模式無法實現中箱涵和邊箱涵的同步精調,導致后期邊箱涵拼裝的錯臺較大。因此,后續工程建議中箱涵和邊箱涵同步拼裝。
2 清華園隧道可視化施工技術
清華園隧道搭建了基于三維BIM模型、VR技術和GIS漫游的可視化、信息化的智慧施工管理監控平臺[14],實現對掘進、拼裝、注漿等施工環節的全過程管理和監控,同時實現了對風險的可視化實時預測和分析。
2.1 盾構可視化施工監控系統
盾構施工監控系統是一個集施工監測數據、施工信息以及施工管理信息于一體,能對海量施工數據進行處理分析,并通過數字化、可視化技術實現不同功能的智慧施工監控系統。
智慧施工監控系統共包括首頁、工程GIS、盾構監控、監測數據、預測預警、系統管理以及信息上傳7大模塊。不同模塊可以實現不同的系統功能,各模塊之間也存在相互聯系和數據交換,共同作用構成智慧施工系統。工程GIS模塊包含了工程的衛星地圖,詳細顯示區間線路的地理位置關系以及和周邊建筑物、市政道路和地鐵的毗鄰關系,同時還詳細顯示線路附近重要的風險源信息。盾構監測模塊詳細顯示隧道掘進當前環的隧道詳情、注漿管道、注漿壓力和速度與位移信息,可實現對盾構掘進姿態和重要參數的實時監控,同時還顯示了施工進度管理圖,包括盾構預設與實際進度比較曲線圖和盾構完成進度餅狀圖,可以方便管理人員直觀地看到隧道掘進的完成情況以及與預設進度的差別,幫助及時進行調整施工進度。
預測預警模塊中展示了詳細的周邊建筑物、市政道路以及地鐵線路的地質信息,同時詳細列舉了線路施工過程中遇到的重要風險源信息,還可對盾構隧道施工引起的地層響應和周邊建筑物響應進行分析預測。風險信息列表詳細列出了風險源的位置、風險等級以及沉降預測值和控制值,并據此判別安全狀態,實現了重要建(構)筑物和主要風險源危險性的實時預測預報功能。
2.2 可視化施工關鍵技術
1)搭建了基于BIM、GIS和互聯網技術的隧道施工可視化管理平臺,采用盾構施工全過程智能化、可視化動態監控與管理,實現對臨近建(構)筑物危險性的實時預測預報。
2)采用經驗方法(如基于Peck理論的經驗方法)和人工智能(ANN、GEP及WPM)等方法多角度綜合實時預測地表及施工影響范圍內的建(構)筑物的沉降及水平變形,推導出不同地層條件和隧道幾何參數對應的最優盾構施工參數指導施工。 Peck預測模型橫斷面沉降槽如圖2所示。Peck預測模型三維視圖如圖3所示。
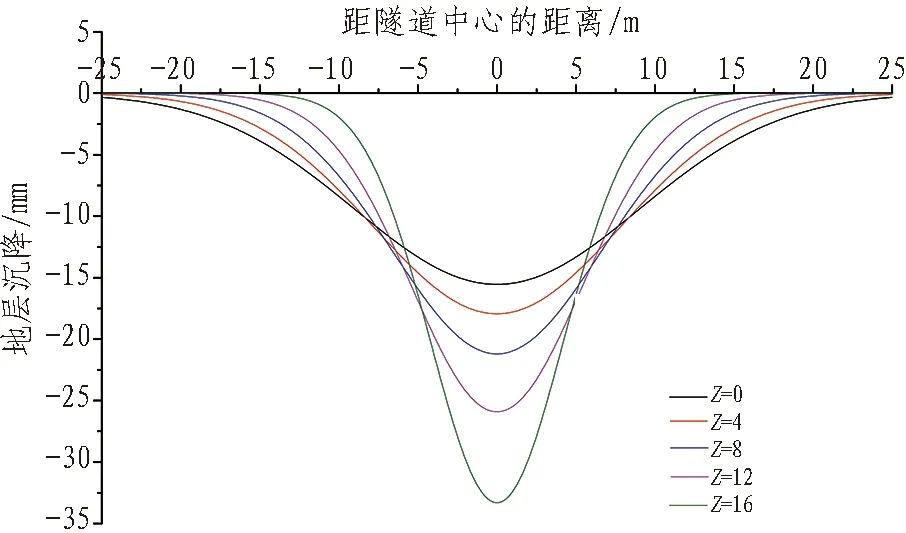
Z為隧道開挖方向與掌子面的距離。

圖3 Peck預測模型三維視圖
3)盾構監控平臺要求將盾構掘進中的地質條件、周邊建筑物、工程措施等信息數字化,并且能夠從盾構的傳感設備中自動采集盾構的姿態參數、壓力參數、進出漿和注漿量參數等,實現各種信息的數字化處理。
2.3 可視化施工技術的應用及其效果
目前該系統在京張高鐵清華園隧道的應用十分可靠,基于信息化、智能化、可視化等現代先進技術成功實現了科學化、精細化的施工目標。在盾構穿越多個風險源的時候,通過3D模型提前展示隧道與周邊環境的關系,并且能夠通過軟件模擬分析盾構掘進過程對周邊環境的影響值進而推薦刀盤轉速、土艙壓力、油缸推力、螺旋輸送機轉速等盾構掘進參數;在盾構推進過程中結合地面測量數據,及時反饋地面沉降量提前預警盾構操作人員,動態調整掘進參數。傳統的盾構掘進參數和監測數據的統計,大部分需要人為分析數據并進行相應的對策處理。盾構可視化施工監控系統大大地簡化了人為干預的流程,不僅能夠預警信息并進行自動判別,加快了應對風險的響應速度和處理效率,降低了安全事故的概率,提高了隧道施工的風險管控能力,初步實現了盾構施工全過程的可視化動態管理。
3 東花園隧道自動化噴涂防水技術
東花園隧道是國內首次采用速凝橡膠瀝青噴涂防水材料的強富水深基坑明挖隧道[15],新型噴涂速凝橡膠瀝青防水材料[16]是一種綠色環保的水性涂料,從生產到使用均不產生有害物質,具有無縫搭接、完美貼合、工作環境要求低、施工效率高、附著力強、耐穿刺、抗酸堿鹽、節能降耗等突出優勢,能解決邊角、裂縫、不規則結構的連接處滲漏等技術難題。東花園隧道專門研制了自動噴涂機器人,有效提高了噴涂施工的質量、效率和智能程度。該機器人能精確地按照設定軌跡自動準確噴涂,使材料與基面全面高強粘附、噴層均一平整。有效減小了損耗量,極大地提高了工效,大幅度提升了施工的安全可靠性。
3.1 自動化噴涂的智控系統
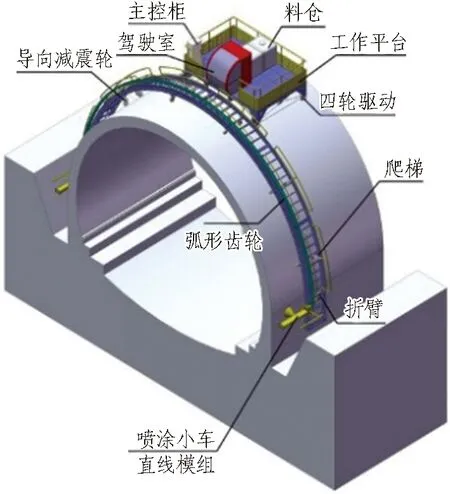
新型速凝橡膠瀝青防水材料的自動化噴涂系統包括工作平臺、控制系統、供料系統、支撐系統、走行系統和噴涂小車6部分,如圖4所示。
1)工作平臺。根據結構外觀尺寸進行定制,是存放控制系統和供料系統的操作平臺,周圍設置護欄。
2)控制系統。主要包括主控制器、主電控制柜和變頻器控制柜,主控制器采用PLC控制器控制,設置觸摸屏+按鈕2種控制,觸摸屏可以實時輸入數值進行設備基本參數設置,一鍵啟動功能,自動運行噴涂、爬升、回位,支撐系統行走電動控制,自帶糾偏功能。
PLC控制器是自動化噴涂的智控中心,其內置的微處理芯片可以計算分析并控制行走系統的速度和供料系統的供應量,以及噴涂小車上噴槍的噴速,從而精準控制噴層厚度。
(a) 三維視圖
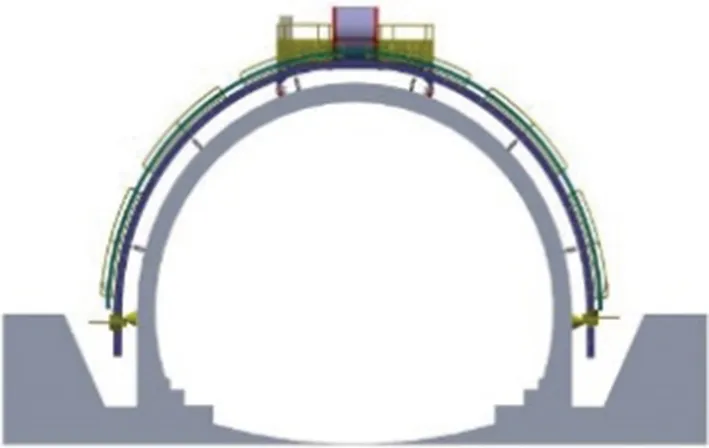
(b) 剖面圖

(c) 頂視圖
3)供料系統。新型噴涂速凝橡膠瀝青防水材料為雙組份涂料,防水涂料主劑A組份為棕褐色黏稠狀的水性橡膠瀝青乳液,固化劑B組份為無色透明的破乳劑,分別裝入操作平臺的2個容器中。通過增壓泵泵送涂料,增壓泵由主控制器進行控制,在支撐系統上設置坦克鏈對管道進行保護,直達噴涂小車,并跟隨小車采用回卷式移動。
4)支撐系統。根據結構外觀尺寸進行定制,采用爬梯形式,可供工作人員行走,并設置護欄。外側采用上、下雙層U型槽鋼,在下層U型槽鋼上設置2道齒槽作為噴涂小車的行走軌道,上層U型槽鋼作為坦克鏈的行走軌道。
5)走行系統。在工作平臺下設置4個驅動輪,每個驅動輪由1個電機驅動,在主控制器控制下行走,并可進行糾偏,在支撐系統下設置可調節單向減震輪隨工作平臺的驅動輪進行移動。
6)噴涂小車。在支撐系統上設懸挑梁,設置4個齒輪與支撐系統的2道齒槽進行連接,在懸挑梁上安裝傳動鏈和噴槍,設置2個電機進行驅動,1個電機驅動噴涂小車沿支撐系統行走,1個電機驅動噴槍沿懸挑梁行走。
自動化噴涂系統實現了新型速凝橡膠瀝青防水施工的智能化。
3.2 自動化噴涂關鍵技術及創新
1)根據防水材料雙組份液體噴涂方式的特性和結構物的外輪廓結構尺寸一致的特點,創新提出了按照結構物的幾何尺寸采用鋼結構定制噴涂機器人,該機器人自動上料、自動噴涂、自動行走,填補了鐵路明挖隧道自動噴涂防水施工的行業空白。
2)新型速凝橡膠瀝青防水自動化噴涂對噴涂厚度的控制,是本智能化設備的核心技術,通過理論計算,固定噴涂壓力,控制噴槍移動速率,實現設計噴涂厚度。噴涂機器人現場作業如圖5所示。

圖5 噴涂機器人現場作業
3.3 自動化噴涂技術應用效果
東花園隧道采用了自動化噴涂技術,自動化噴涂機器人的施工工效是人工噴涂施工工效的4倍。按照東花園隧道噴涂22 000 m2進行計算,人工噴涂每日噴涂500 m2,需要44 d; 機器人噴涂每日噴涂2 000 m2,需要11 d,節約工期33 d。自動化噴涂機器人只需2人1組,人工噴涂需要6人1組,減少現場作業人員66.7%。
傳統人工噴涂需要人工手持噴槍進行作業,在倒弧形上高空作業,作業人員危險性極高,屬于高危作業; 自動化噴涂采用自動噴槍,無需作業人員高空作業,有效降低了作業人員的危險性。
自動化噴涂機器人能夠精確地控制噴涂用量,操作簡單,噴涂厚度完美均一,有效地避免了人工噴涂存在的噴涂厚度不一、搭接面處理不到位等(合格率為100%),對防水涂料的使用量控制更好。而傳統人工噴涂誤差較大,使用量低于設計量達不到防水效果;使用量高于設計量噴涂材料成本增加。采用自動化噴涂機器人,有效避免了隧道滲漏水情況的發生,降低了洞內滲漏水對洞內設備和運營車輛產生破壞和影響的程度,同時減少了后期對隧道滲漏水進行處理產生的高額費用。
自動化噴涂機器人的應用有效地降低了現場管理人員的工作量,按照驗收標準采用針測法測厚儀對噴涂防水層進行實時監測,每100 m2抽查1處。而傳統人工噴涂施工單位為了控制噴涂質量都是進行加密監測,同時需要對不合格部位進行加強處理,處理完成后還需要進行監測。
東花園隧道在自動化噴涂實現的過程中設計了專門的噴涂機器人及相應的控制系統,對裝備的要求較高,在后續的推廣過程中可能存在一定的困難。
4 基于三維激光掃描技術的隧道斷面質量管理系統
基于三維激光掃描技術的隧道斷面質量管理系統是以BIM為核心,面向鐵路工程隧道建設的新一代信息化管理平臺。該系統通過三維激光掃描自動采集終端,利用專業分析軟件對點云數據的平整度按照相應規范要求進行分析,分析結果自動上傳至預警平臺進行展示和預警發布處置,方便鐵路工程施工單位及監理單位在平臺上對隧道施工斷面質量進行管理,提高了工程質量的管理水平與效率,達到了“快速辨識風險、及時預報風險、形象展示風險、有效控制風險”的目標。
4.1 三維激光掃描隧道斷面質量管理系統
基于三維激光掃描技術的隧道斷面質量管理系統功能架構包括現場數據采集端、前端處理和系統分析端。
1)數據采集端。通過利用三維激光掃描儀與全自動全站儀相結合的新技術,突破了傳統測量中由點到線、再由線到面的單點作業模式,通過高速激光掃描測量的方法,能快速獲取被掃描物表面的海量三維點云數據,實現了從點測量到面測量的跨越,從而能快速建立物體的三維模型。
2)前端處理。將收集而來的點云數據進行清理、優化,實現超欠挖、平整度、直圓度、斷面、變形、方量、中線偏差等指標的分析計算。對點云數據進行處理,形成實體的工程模擬影像,并通過運用點云數據中所包含的色彩、反射強度等信息,分析隧道的滲水、裂縫等情況,實現隧道質量的可視化管理,推動隧道工程的質量管理。
3)系統分析端。系統分析端是隧道斷面質量管理系統的核心,通過對點云數據進行處理,并與隧道BIM模型進行關聯比對,實現斷面步距對開挖、初期支護和二次襯砌超欠挖分析、平整度計算、斷面分析、變形計算、方量計算、真圓度計算、中線偏差計算等功能;并能根據超欠挖分析數據、平整度分析數據、方量對比數據、變形數據等信息,綜合分析每段里程內的施工過程數據、成型質量數據,形成綜合評判指標。既能對已完工程進行質量評判,又能對后續施工提出改進措施,避免出現超欠挖、平整度超限的情況。基于三維激光掃描技術的隧道斷面質量管理系統功能架構如圖6所示。
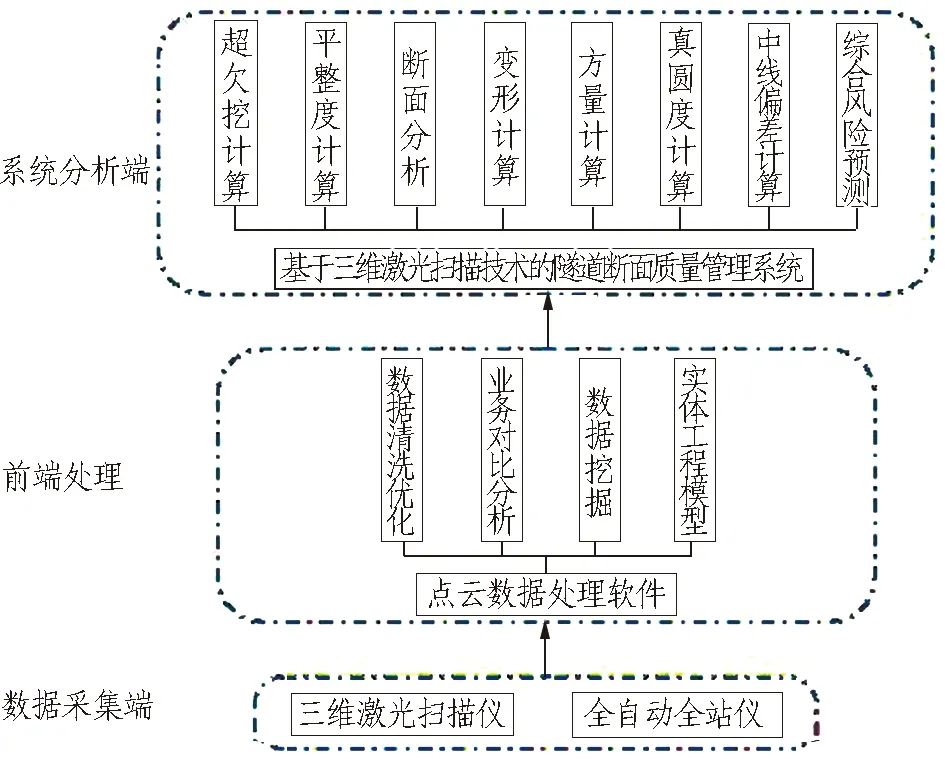
圖6 基于三維激光掃描技術的隧道斷面質量管理系統功能架構
4.2 隧道斷面質量管理系統關鍵技術及創新
1)通過三維激光掃描技術全自動、高精度、立體掃描手段,短時間、遠距離、高精度地獲得掃描目標的表面三維坐標,高效、完整地記錄施工現場的復雜情況,與設計BIM模型進行對比關聯,為工程質量檢查、工程驗收帶來巨大幫助。
2)三維激光掃描技術處理軟件與BIM模型屬于不同元數據,本系統實現兩者的自動和實時傳輸,把所有異類數據“同化”為統一類型數據,存儲在云端數據庫。不同元數據傳輸完成之后,按需求里程段進行不同數據的實時解析,提供斷面圖打包下載、分析結果及報告下載等功能,實現整體多元數據的同步和高效協同。
3)首次實現隧道三維激光掃描技術生成的控制點點云數據與BIM模型編碼數據數字化集成,實現動態重構點云模型與BIM模型實時關聯,實時掌握施工狀態,進一步實現對隧道進行施工作業過程開挖、初期支護、二次襯砌的超欠挖分析、隧道凈空計算、隧道空洞監測等,實現基于BIM的隧道超欠挖、凈空及空洞方量等三維可視化質量管控。
4)首次采用三維激光掃描技術、BIM可視化技術以及移動互聯技術等信息化新技術手段,對現有高鐵隧道工程平整度計算規則和標準進行優化提升,制定的鐵路隧道工程平整度計算原理和數學分析模型,形成高鐵隧道工程平整度新的技術標準,能夠提高平整度分析的速度和精度,并可以及時在預警系統進行展示和預警發布,實現問題及時反饋和閉環處置。
4.3 隧道斷面質量管理系統技術應用效果
在新八達嶺隧道項目和正盤臺隧道項目中,通過應用基于三維激光掃描技術的隧道斷面質量管理系統,極大地提高了隧道斷面質量管理準確性與及時性,較大程度提高了參建各方的工作效率[17]。在數據采集端,據不完全統計,該系統的應用已節省人工成本20%,提高采集效率30%,提高準確率25%。在前端分析中,通過對點云數據進行斷面切分、超欠挖、平整度、方量、變形等指標的專業分析,自動生成BIM模型、分析報表和斷面圖實時指導現場作業人員。與此同時,各類分析結果能夠實時傳輸到預警系統中進行預警管控,實現監測物聯傳輸、集中存儲、專業分析、預警發布,實現對隧道工程建設過程關鍵部位、關鍵質量問題的有效管控,全面提升所建隧道項目施工全過程的精益管理,提高了建設管理人員的管理效率及準確性,便于及時消除施工安全隱患。
通過應用該系統,解決了數據采集、處理、反饋、預警的及時性和準確性問題,實現了數據傳輸、處理、反饋和預警自動化,同時具有溯源監管功能,起到了檢查和指導的作用。與傳統方法相比,應用基于三維激光掃描技術的隧道斷面質量管理系統,滿足了對隧道斷面量測進行過程控制和預警處理的需求,加強了對現場作業行為的監管力度,保證隧道施工及周邊環境施工安全的及時性、真實性,實現對變形異常及時、快速地響應和處理,及時消除安全隱患,降低了安全事故的概率,提升了隧道施工風險管控能力,得到了多家使用單位的良好反饋。
5 結論與討論
1)清華園隧道軌下結構采用全預制拼裝技術,并研發了拼裝機器人,實現了智能化拼裝,極大地提高了施工效率與拼裝精度。
2)清華園盾構隧道應用可視化施工系統施工,能夠實時展示盾構工作情況,并能根據盾構實時狀態自動分析風險情況并給予推進參數建議,有效地提升了施工質量和管理效率。
3)東花園隧道防水工程創新性地采用了自動化噴涂防水技術,利用鋼結構定制自動噴涂機器人,實現了防水材料的自動上料、自動定位、自動噴涂。與傳統人工噴涂技術相比,在施工質量、安全、工效和進度上有顯著優勢。
4)新八達嶺隧道和正盤臺隧道在建設過程中應用了基于三維激光掃描技術的隧道斷面質量管理系統,將BIM精細化模型與三維激光掃描點云模型進行深度融合,進一步實現對隧道施工作業過程的可視化。
在京張高鐵隧道智能技術應用的過程中仍存在一些不足需要改進,例如采用全預制拼裝技術進行施工時不可避免會產生拼接誤差,同時拼裝機也存在適應性不強的問題;在可視化施工系統應用的過程中需要進一步加深人機互動的便利性,優化系統界面,同時加強推廣,提高從業人員的素質。
猜你喜歡
北京測繪(2022年6期)2022-08-01 09:19:06
建材發展導向(2022年10期)2022-07-28 03:04:36
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
建材發展導向(2021年18期)2021-11-05 09:19:50
北京測繪(2021年7期)2021-07-28 07:01:18
建材發展導向(2021年9期)2021-07-16 07:11:36
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
中國房地產業(2016年2期)2016-03-01 01:25:48
