海外露天礦北斗高精度位移安全監測系統研究*
2021-09-15 02:34:40杜素忠張錄彬周耀東易國鵬
工業安全與環保 2021年9期
杜素忠 張錄彬 周耀東 易國鵬
(萬寶礦產有限公司蒙育瓦銅礦 北京 100053)
0 引言
邊坡穩定性、地基沉降、地表變形等位移安全是露天礦山的主要安全風險因素,需要進行實時監測,否則容易引發重大事故。海外露天礦山普遍占地面積廣,監測點位多、布局分散、精度要求高,礦山內公共通信資源受限、新技術應用少,位移監測多數依靠傳統測量方式,工作效率低、實時性不強、高精度測量過程復雜。基于導航衛星(Global Navigation Satellite System, GNSS)空間定位原理,本文提出一種以北斗導航系統(BeiDou Navigation Satellite System,BDS)為主、美國全球定位系統(Global Positioning System, GPS)和俄羅斯導航衛星系統(Global naya Navigatsionnaya Sputnikovaya Sistema, GLONASS)為輔的海外露天礦山位移安全實時在線監測預警系統,精度高、針對性強,可滿足海外露天礦山24 h連續在線位移監測要求。
蒙育瓦銅礦位于緬甸石皆省境內,由L礦和S&K礦兩個大型礦山組成,項目占地面積超過50 km2,采剝總量超過1.5億t/a,屬亞洲目前最大濕法冶金銅礦山。隨著生產的推進,礦山位移安全風險逐年升高,需對采場和排土場邊坡穩定性[1]、旋回破碎站基礎變形、中間料堆和堆浸場沉降等進行監測。本文結合蒙育瓦銅礦案例介紹系統原理,說明系統具體應用方法和效果。
1 位移監測
現有位移安全監測技術包括大地測量、無人遙感、雷達干涉和GPS定位監測等。大地測量為傳統方法,屬先測量、后分析;無人遙感[2-3]和大地測量原理類似,但測量載體和分析方法不同;合成孔徑或真實孔徑雷達干涉[4]多用于邊坡穩定性監測,但需配備專用車輛或在特定角度和位置安裝,且容易受到外部干擾,存在一定局限性。
以GPS為代表的GNSS監測[5-6]是依靠導航衛星定位功能,實現對目標的實時定位監測分析后觸發預警。受GPS系統限制,海外礦山存在可觀測GPS衛星數量有限、信號波動大、信息完整度不高、監測數據遠程傳輸不便等情況,導致監測精度不夠、預警不及時,影響安全生產。目前,國內已有部分關于BDS代替GPS的報道[7],但原理、結構和通用性等方面尚不能指導構建完整系統。
1.1 距離測定
GNSS由控制段、空間段和用戶段組成。其中,控制段由主控站、監測站、地面天線和相關處理資源等組成,用于監視、控制和更新空間段衛星信息;空間段主要指導航衛星,負責通過信號正確播發衛星位置、速度和時間;用戶段是應用終端,通過用戶接收機測量其與衛星的距離,確定接收機精確位置。用戶接收機由天線、低噪聲放大器、射頻前端、基帶信號處理器等組成,用于接收衛星播發的原始電磁信號,并最終將電學參數轉換成數字信號,獲取衛星星歷。假設沒有外部干擾,發射時鐘與接收時鐘同步,則j時刻用戶接收機到衛星的距離pj為
pj=c·(t2-t1)
(1)
式中,c為傳播速度,無干擾時為真空光速;t1為衛星發生信號時刻;t2為用戶接收機接收信號時刻;t2與t1的差為信號傳播時間。
衛星信號包含導航電文、偽距碼和載波三要素。偽距碼和載波具有固定結構,可用來計算傳輸時間。根據傳輸時間計算方法不同,可分為偽距碼相位測距和載波相位測距。導航電文按照固定結構幀發送,偽距碼相位測距中,t1為
t1=T0+(n+f)·τ
(2)
τ=N·Tc
(3)
式中,T0為參考發射時間;τ為偽距碼周期;n為完整偽距碼總片數;f為偽距碼小數部分;N為一個偽距碼周期;Tc為碼片長度。
載波相位測距中,t1和t2分別為
(4)
式中,k為常數,將相位轉換為相應起始時刻的時間;n1、n2為未知整數,表示從任意參考時刻開始經過的2π弧度整數;φ1、φ2為相應相位分數部分。由于n1、n2無法直接測量,二者之差被稱為“整周期模糊度”,需借助一個就近初始值迭代完成解算。
偽距碼相位測距和載波相位測距誤差比為
(5)
式中,E為測距誤差比,也可表示信號傳播時間計算誤差比;△pcod為偽距碼相位測距誤差;△pcar為載波相位測距誤差;fc為載波頻率;rc為碼片速率。因衛星載波頻率比碼片速率高很多倍,故載波相位測距比碼片相位測距準確度高。但載波相位測距存在“整周期模糊度”問題,增大了測距計算復雜度,需要長期數據積累后計算,不適合實時定位解算。
1.2 監測點定位
導航電文根據控制段修正值、衛星運行狀態生成并進行播發,包括衛星星歷數據、時間戳、修正位置、預測狀態、修正時間、測距誤差、攝動參數、時鐘漂移等。不考慮誤差的理想狀況下,在任意時刻j,用戶接收機觀測并接收衛星i的導航電文后,可計算出該衛星位置Sij為
Sij=[xij,yij,zij]
(6)
需要求解的監測點用戶接收機位置Uj為
Uj=[xuj,yuj,zuj]
(7)
Sij與Uj的距離pj為
(8)
優選4顆衛星,建立四元非線性方程組,可解算用戶接收機位置。
1.3 應用方法
海外礦山位移安全監測中,根據生產條件選定監測點,建設以用戶接收機為核心的位移監測站,實現位移監測,監測內容包括水平位移和高程位移。蒙育瓦銅礦L礦建設8套監測站,S&K礦建設11套監測站,分別實現采區、排土場、破碎站、堆場等位移安全監測。位移監測站基本結構如圖1所示,包括輔助立柱、高精度接收機、測量型天線、太陽能供電系統和客戶前置(Customer Premise Equipment, CPE)。其中,CPE通過無線傳輸模式與礦區長期演進技術(Long Term Evolution, LTE)基站形成通信鏈路[8],實現位移監測站信息完整傳輸。
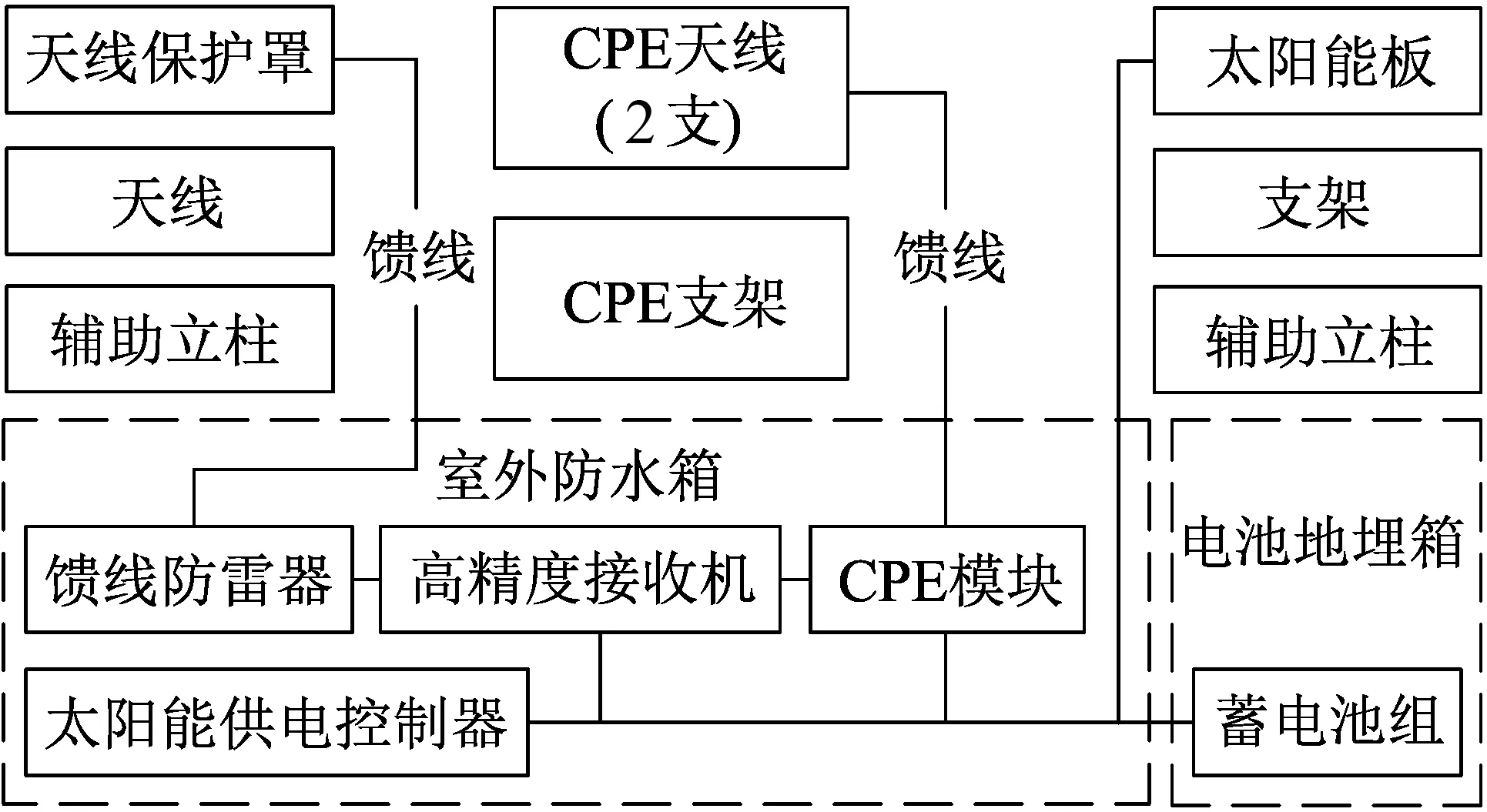
圖1 監測站結構
2 高精度定位
2.1 誤差分析
在實際應用中,不能忽略用戶接收機觀測過程誤差,否則定位將出現重大偏差,影響位移監測效果。位移安全監測時的常見誤差如表1所示,其中常數誤差在信號發射前就存在,相關誤差與用戶位置和地理位置存在相關性,非相關誤差與用戶位置有關、與地理位置不存在相關性。
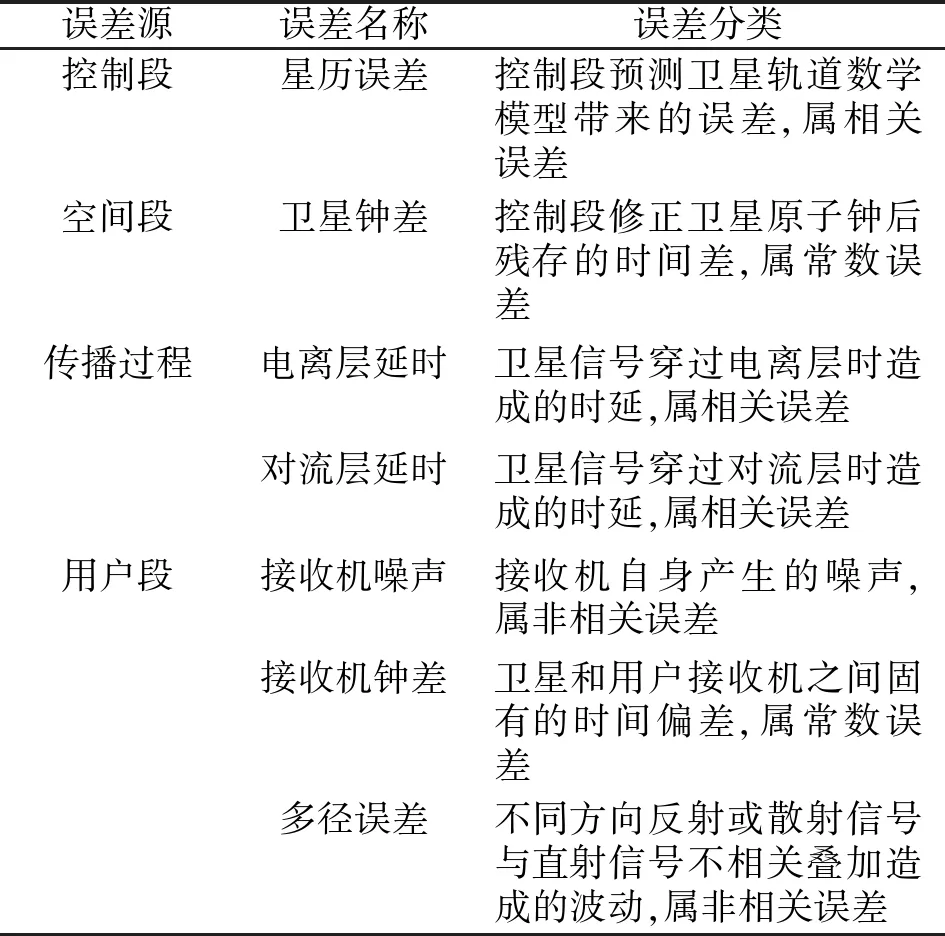
表1 常見誤差分析
考慮誤差,任意時刻j實際觀測距離Rj與pj的關系為
Rj=pj+c·△tu+c·△ts+△reph+△rion+△rtrp+△m+ε
(9)
式中,△tu為接收機鐘差;△ts為衛星鐘差;△reph為星歷誤差帶來的測距誤差;△rion為電離層延時引起的測距誤差;△rtrp為對流層延時引起的測距誤差;△m為由多徑等引起的測距誤差;ε為用戶接收機本身噪聲引起的測距誤差。
2.2 差分定位
差分定位分為位置差分和距離差分,可消除共性誤差、減小相關誤差。位移安全監測系統中,采用式(9)進行距離差分,即借助事先已知精確位置的高精度基準站,通過基準站測量值及其相關信息,減弱或消除星歷誤差、衛星鐘差、接收機鐘差、對流層延時誤差等對監測站定位的影響。
因測距方法不同,差分定位可分為偽距差分定位和載波相位差分定位。載波相位差分定位精度高于偽距差分定位,但基準站和監測站需采集和存儲足夠數據,通過數據后處理產生修正值來修正監測站誤差,得到后驗精確位置。在露天礦山位移安全監測中,偽距差分定位更適合實時定位解算和位移監測,載波相位差分定位更適合以后處理解算為基礎的位移趨勢分析。
偽距差分定位分為絕對差分定位和相對差分定位。相對差分定位中,基準站向監測站不僅播發誤差信息,還提供距離觀測量;偽距差分定位中,相對差分結果為載波相位差分提供初始值,求解“整周期模糊度”,實現位移趨勢監測、預測和預警。
服務范圍及定位精度要求決定了基準站數量。為保證精度,系統將基準站附近5 km區域定義為服務范圍,超出基準站服務范圍后,監測站精度將不能滿足位移監測要求。
2.3 電離層誤差
即使在基準站服務范圍內,監測站和基準站電離層誤差仍不同,差分定位不能消除電離層誤差,需要依靠接收機雙頻或多頻接收能力。這是通過GDS和GLONASS校正BDS的原因之一。
設接收機存在兩個或以上接收頻率,分別選擇f1和f2兩個頻率,在任意時刻j,f1實際觀測距離為R1j,f2實際觀測距離為R2j,用戶位置pj為
(10)
(11)
2.4 應用方法
蒙育瓦銅礦選擇以BDS為主、GPS和GLONASS為輔的用戶接收機作為基準站和監測站主要設備,實現多頻接收、消除定位誤差。不同類型接收機數據格式可基本保持一致,但監測站接收機和基準站接收機之間的噪聲差異也會產生誤差,無法完全抵消,選擇同型號設備有利于減小噪聲誤差影響。接收機主要指標如表2所示,基準站和監測站的區別在于使用的天線類型不同。
L礦和S&K礦距離超過8 km,因此在L礦和S&K礦各建立了一個高精度基準站,結構如圖2所示,用于向所在區域播發信息。基準站通過有線網絡接入礦區工業互聯網[9]。
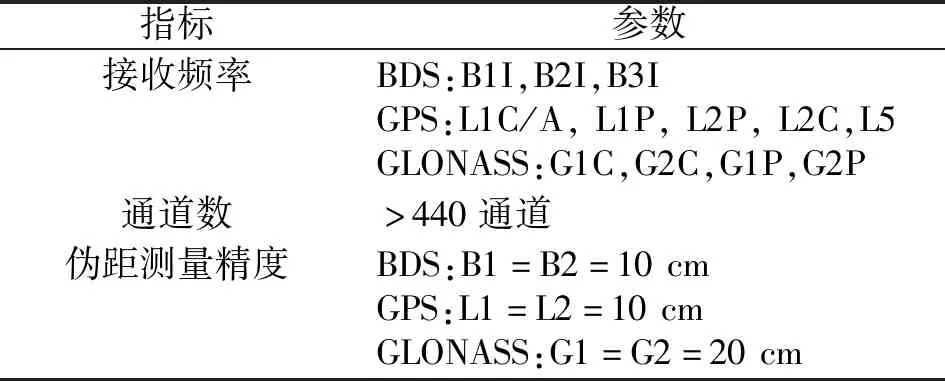
表2 接收機主要技術參數
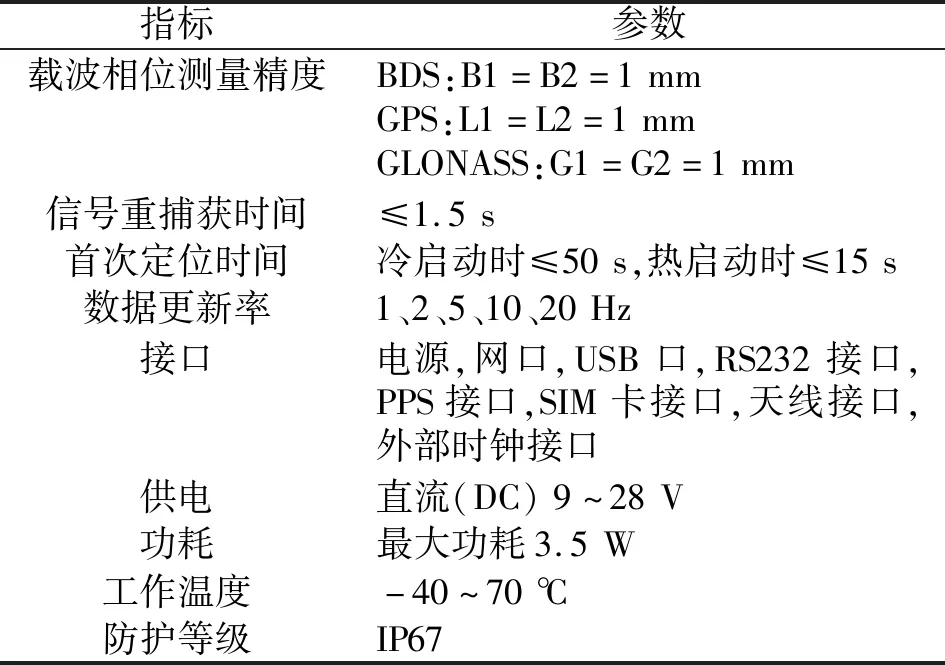
續表2

圖2 基準站結構
同時,采用專用解算軟件實現載波相位差分定位計算:基準站和監測站將觀測信息發送至專用解算軟件進行數據接收、存儲和解算,通過偽距差分實現監測站實時定位精度水平誤差約20 mm、高程誤差約30 mm[10];通過載波相位差分實現監測站后處理定位精度水平誤差約2 mm、高程誤差約3 mm,利于分析長期位移趨勢。
系統中差分定位所需高精度基準站已知位置是由接收機14 d不間斷接收獲取衛星星歷后,通過解算專業軟件和離線高精度定位解算對比獲得,并非來自傳統測量。這要求高精度基準站選址地點要非常牢固,避免因基準站位移帶來位移安全監測失敗;同時,基準站應該選擇在地勢開闊位置,避免多徑誤差。
2.5 衛星選擇
在減小或消除誤差的基礎上,由式(7)求解Uj需要接收機至少觀測到4顆以上衛星,單一衛星信號強度應高于30 dbm,且衛星越分散,定位精度越高。在實際應用中,可觀測衛星數量和類型越多,越便于基準站和監測站選擇最優組合以提高定位精度。
應用發現,蒙育瓦銅礦內不同位置GPS可觀測衛星數量在5~12顆,信號在30 dbm上下波動,周跳引起接收機累計值重置明顯,對載波差分定位有影響;BDS在可觀測衛星數量、信號穩定性和完整性等方面則更優。
3 系統集成
根據分析,建立系統集成邏輯結構如圖3所示。
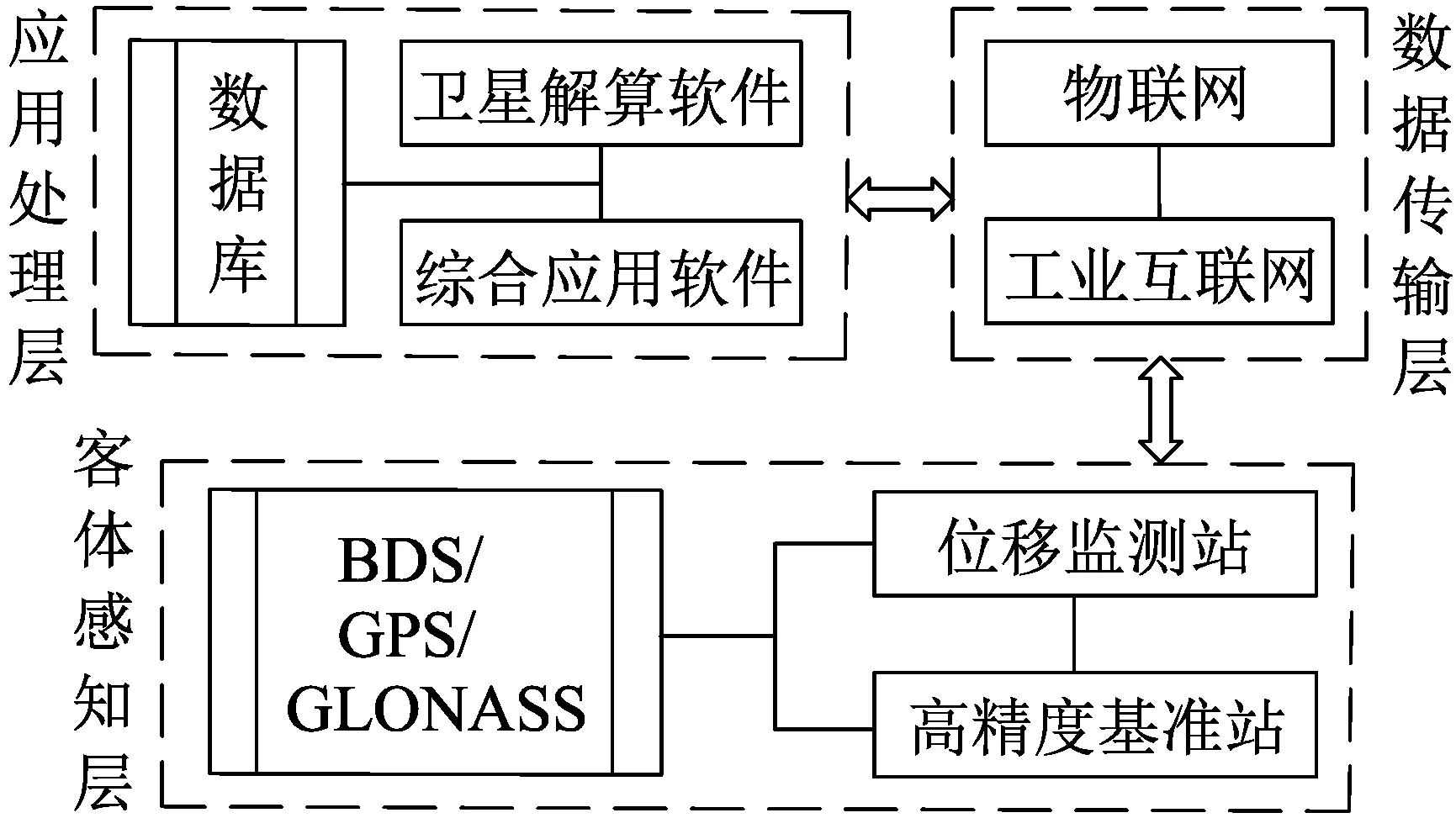
圖3 系統邏輯結構
(1)客體感知層屬于外部信號采集環節,主要包括高精度基準站、位移監測站等。高精度基準站還可為蒙育瓦銅礦的大地測量、車輛定位、無人機遙感等提供高精度基準數據。
(2)數據傳輸層負責系統內信息傳遞,包括將基準站誤差修正數據發送給監測站接收機,將基準站和監測站數據發送給解算軟件,向最終用戶傳輸監測和預警數據等。衛星通信誤差不會造成測距誤差,但數據傳輸層延時過大會導致位移監測站不能及時獲得基準站誤差修正數據,影響測距效果。短暫過大網絡延時或丟包會造成偽距差分定位短時誤差增大并出現誤報,對載波相位差分定位后處理結果影響不大。蒙育瓦銅礦工業互聯網中有線網絡延時5 ms以內、無線網絡延時180 ms左右,可滿足監測要求。
(3)應用處理層接收客體感知層數據,保存實時衛星星歷和監測結果,進行載波相位差分后處理,根據實時監測和后處理結果觸發預警信息,生成歷史記錄。應用處理層部署于蒙育瓦銅礦私有云平臺[11],保證系統連續、穩定、安全運行。其中,綜合應用軟件實時讀取解算軟件結果,支持根據位移速度、加速度和計量值的預警。蒙育瓦銅礦采場位移監測預警分為三級,例如:采場邊坡計量值三級預警閥值分別為20、40、60 mm,位移速度三級預警閥值分別為1、2、3 mm/d,預警方式包括軟件界面預警和即時通信預警。
4 結論
(1)基于北斗高精度空間信息技術,提出一種由高精度基準站、位移監測站和相關軟件為主構成的海外露天礦山北斗高精度位移安全監測系統。
(2)該系統原理明確、結構清晰,可消除或減小用戶接收機定位誤差,適用于海外露天礦山大范圍、多點位、分散式、高精度定位場景,滿足實時在線連續監測預警要求,具有較強的實用價值。
(3)結合蒙育瓦銅礦介紹應用經驗,證明北斗系統海外應用的優越性,對海外露天礦山構建高精度位移安全監測預警系統具有重要的參考意義。