五自由度冗余機(jī)械臂運(yùn)動(dòng)學(xué)分析
2021-09-10 05:19:56谷雷黃福洋
內(nèi)燃機(jī)與配件 2021年12期
關(guān)鍵詞:機(jī)械臂
谷雷 黃福洋


摘要:為了完成對(duì)核聚變?cè)囼?yàn)裝置的日常維護(hù)工作,通過(guò)遙操作機(jī)械臂對(duì)核聚變實(shí)驗(yàn)堆裝置進(jìn)行包層維護(hù)是核聚變實(shí)驗(yàn)遙操作維護(hù)系統(tǒng)的重要任務(wù)之一。包層遙操作維護(hù)機(jī)械臂工作空間狹小,需對(duì)機(jī)械臂進(jìn)行特殊設(shè)計(jì)。設(shè)計(jì)五自由度冗余機(jī)械臂方案,并進(jìn)行動(dòng)力學(xué)分析和Matlab仿真分析。
關(guān)鍵詞:核聚變裝置;機(jī)械臂;運(yùn)動(dòng)學(xué)分析;D-H法;Matlab
中圖分類(lèi)號(hào):TP242? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻(xiàn)標(biāo)識(shí)碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號(hào):1674-957X(2021)12-0073-04
0? 引言
煤炭、石油等傳統(tǒng)能源的使用帶來(lái)巨大的污染,對(duì)人們的生產(chǎn)、生活造成巨大影響,因此清潔能源的利用顯得尤為重要。核聚變反應(yīng)是一種理想的獲得清潔能源的途徑[1],托卡馬克是核聚變商用的重要裝置。由于對(duì)裝置的維護(hù)工作需在一定的輻射環(huán)境下進(jìn)行,因此采用遙操作機(jī)械臂執(zhí)行相關(guān)維護(hù)工作是最重要的實(shí)現(xiàn)方案[2],已驗(yàn)證其可行性,如在國(guó)際熱核聚變實(shí)驗(yàn)堆ITER包層維護(hù)采用遙操作機(jī)械臂順利完成任務(wù)[3]。我國(guó)的核聚變項(xiàng)目CFETR中包層的轉(zhuǎn)運(yùn)任務(wù)由遙操作機(jī)械臂完成,由于聚變堆內(nèi)部空間狹小,包層底部鎖緊軸銷(xiāo)維護(hù)機(jī)械臂的設(shè)計(jì)難度增大,結(jié)構(gòu)要求特殊。設(shè)計(jì)可折疊的五自由度冗余機(jī)械臂,可在狹小空間內(nèi)工作,且避障能力較好,故能夠在復(fù)雜的聚變裝置內(nèi)執(zhí)行維護(hù)工作[4]。可廣泛應(yīng)用于工作空間狹小、復(fù)雜的工作環(huán)境,解決人工無(wú)法完成的工作,具有一定的避障能力。在汽車(chē)生產(chǎn)領(lǐng)域,可取代人工安裝螺栓、鉆孔等工作,提高工作效率、工作質(zhì)量;冶煉過(guò)程中,代替工人抓取鑄造鋼坯,避免工人受傷,提高效率;大型鍛造過(guò)程中,代替人工完成鍛造件的轉(zhuǎn)運(yùn),保障工人的人身安全,降低風(fēng)險(xiǎn)。
本文選擇五自由度冗余機(jī)械臂作為研究對(duì)象,通過(guò)改進(jìn)型D-H參數(shù)法對(duì)機(jī)械臂進(jìn)行運(yùn)動(dòng)學(xué)分析、求解,并通過(guò)MATLAB進(jìn)行仿真分析,為后續(xù)機(jī)械臂研究提供參考。
1? 機(jī)械臂結(jié)構(gòu)參數(shù)
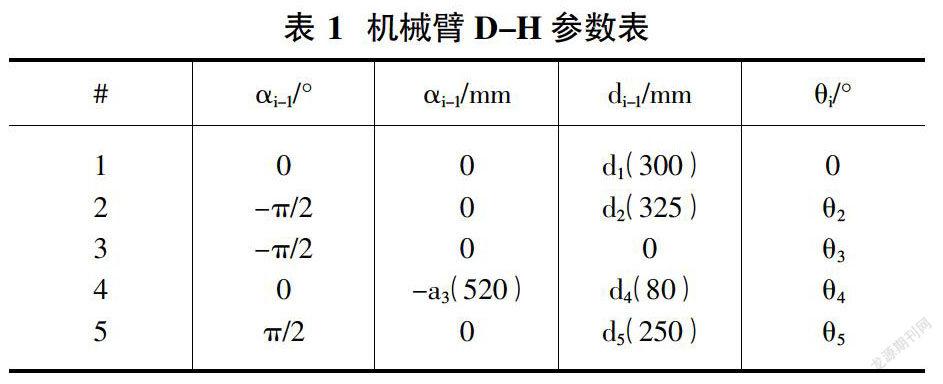
通過(guò)關(guān)節(jié)坐標(biāo)結(jié)構(gòu),機(jī)械臂設(shè)計(jì)為五自由度冗余機(jī)械臂,包括四個(gè)轉(zhuǎn)動(dòng)自由度和一個(gè)底部移動(dòng)自由度[5],最大負(fù)載20kg,最大工作半徑770+300mm。通過(guò)改進(jìn)型D-H參數(shù)法和各關(guān)節(jié)間的相互關(guān)系,建立五自由度冗余機(jī)械臂的運(yùn)動(dòng)學(xué)模型,5個(gè)關(guān)節(jié)建立包括參考坐標(biāo)系在內(nèi)的6個(gè)坐標(biāo)系,推導(dǎo)齊次變換矩陣,計(jì)算出相關(guān)位姿參數(shù),得到各關(guān)節(jié)坐標(biāo)系間的位置和姿態(tài)[6-8],從而獲得機(jī)械臂位姿和運(yùn)動(dòng)的狀態(tài)。根據(jù)改進(jìn)型D-H參數(shù)法建立機(jī)械臂坐標(biāo)系,如圖1所示,機(jī)械臂D-H參數(shù)如表1所示。
其中?琢i-1表示繞Xi-1軸旋轉(zhuǎn)使Zi-1軸Zi與軸平行的角度;ai表示沿Xi-1軸方向移動(dòng),使得Zi-1軸與Zi軸共面的距離;di表示沿Zi軸方向移動(dòng),使得Xi-1軸和Xi軸重合的距離;?茲i表示繞Zi軸旋轉(zhuǎn)使Xi-1軸和Xi軸平行的角度。
2? 機(jī)械臂運(yùn)動(dòng)學(xué)正解
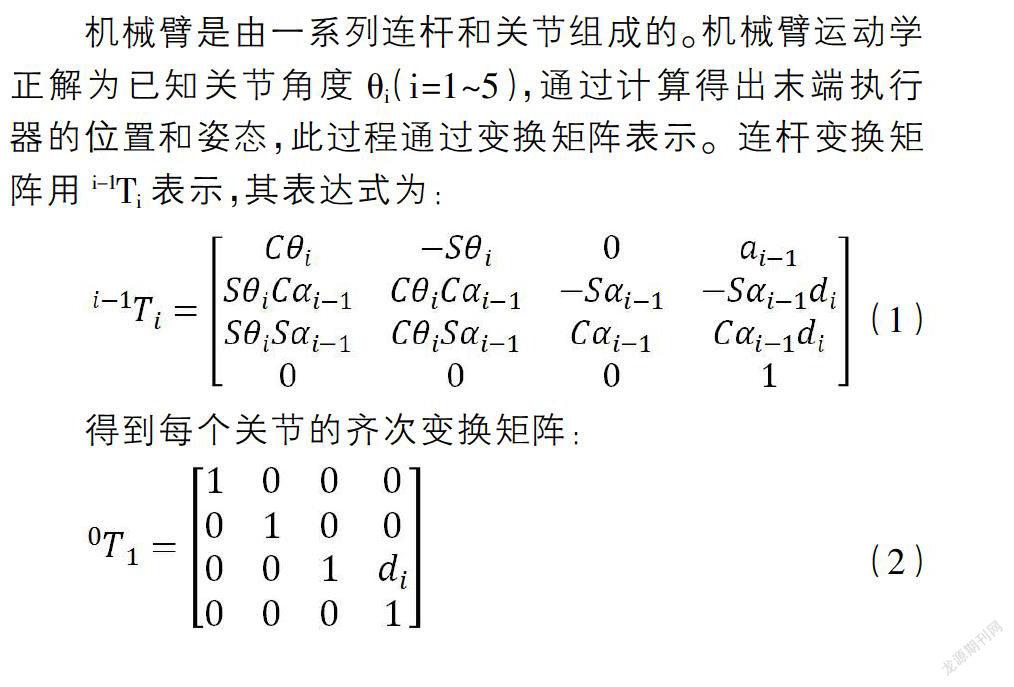
機(jī)械臂是由一系列連桿和關(guān)節(jié)組成的。機(jī)械臂運(yùn)動(dòng)學(xué)正解為已知關(guān)節(jié)角度?茲i(i=1~5),通過(guò)計(jì)算得出末端執(zhí)行器的位置和姿態(tài),此過(guò)程通過(guò)變換矩陣表示。連桿變換矩陣用i-1Ti表示,其表達(dá)式為:
3? 機(jī)械臂運(yùn)動(dòng)學(xué)逆解
逆運(yùn)動(dòng)學(xué)求解為求解正運(yùn)動(dòng)學(xué)的逆過(guò)程,求解思路為給定機(jī)械臂末端執(zhí)行器一個(gè)期望位姿,通過(guò)解析法計(jì)算得出各個(gè)關(guān)節(jié)的運(yùn)動(dòng)參數(shù)。
當(dāng)0T5已知,根據(jù)上述公式(2)~公式(7)得?茲i(i=1~5)。
①求解?茲2的值。
這里的四象限反正切函數(shù)Atan2(sin,cos)[9]是機(jī)器人中常用的函數(shù),可有效避免計(jì)算出錯(cuò)。如式(12)中?茲2采用Atan2(sin,cos)函數(shù)的輸入?yún)?shù)為角度的值sin和cos值,可以準(zhǔn)確的定位到某一確切象限。
4? MATLAB仿真分析
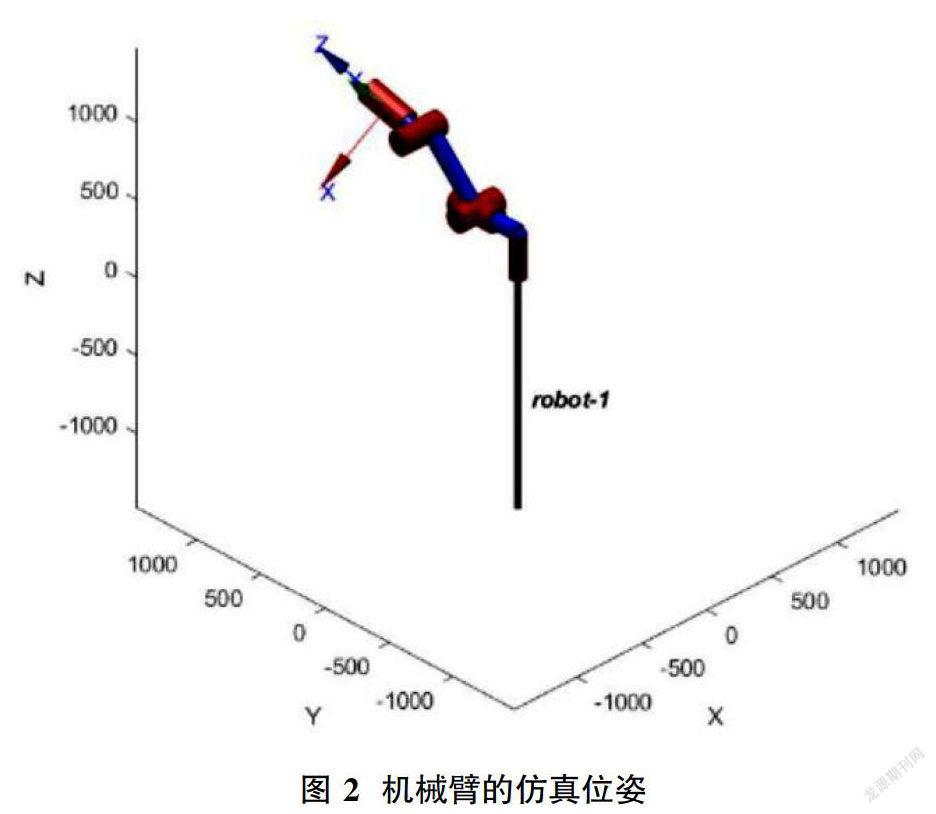
4.1 驗(yàn)證正運(yùn)動(dòng)學(xué)
4.3 工作空間分析
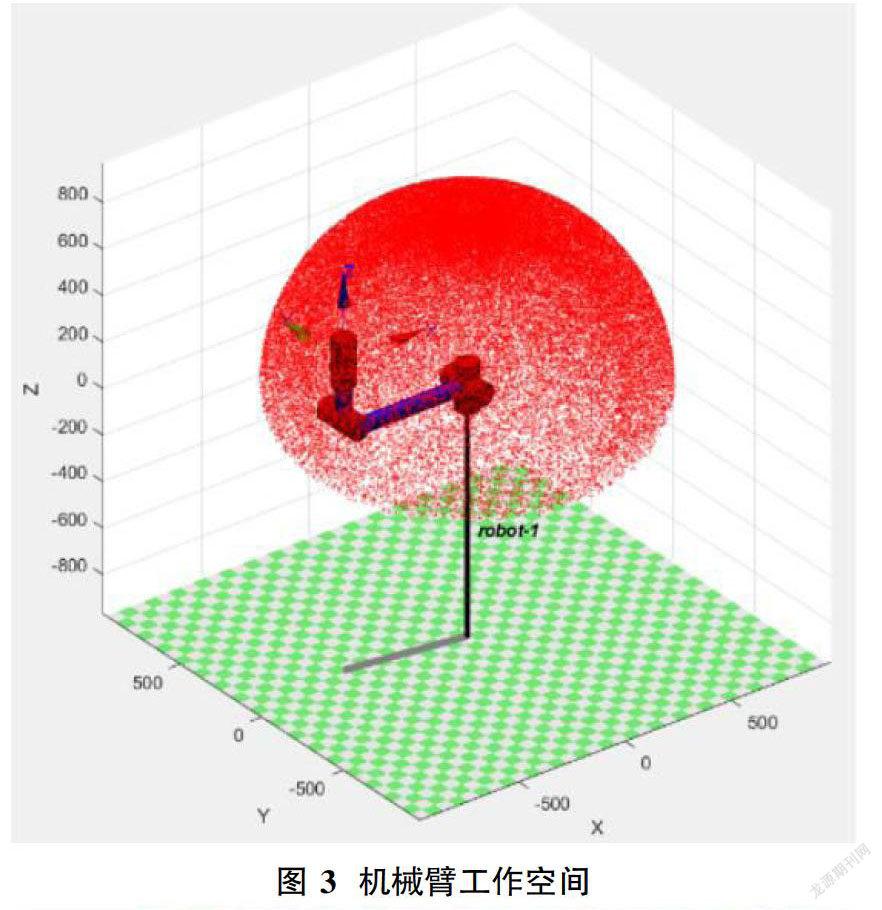
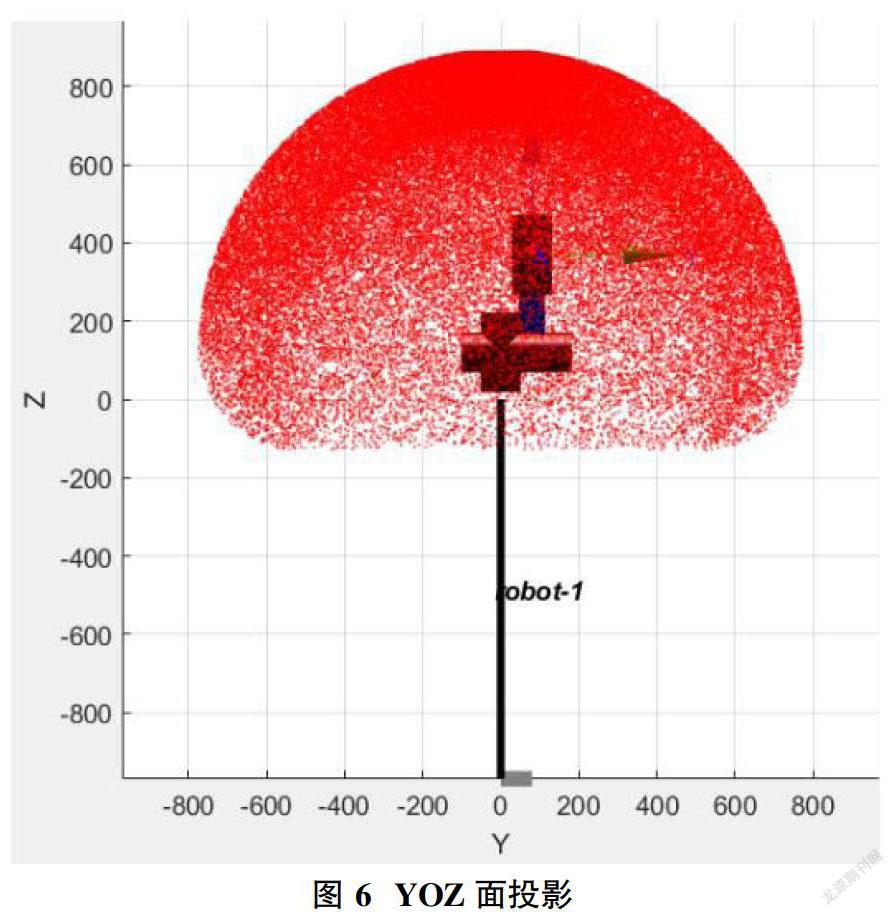
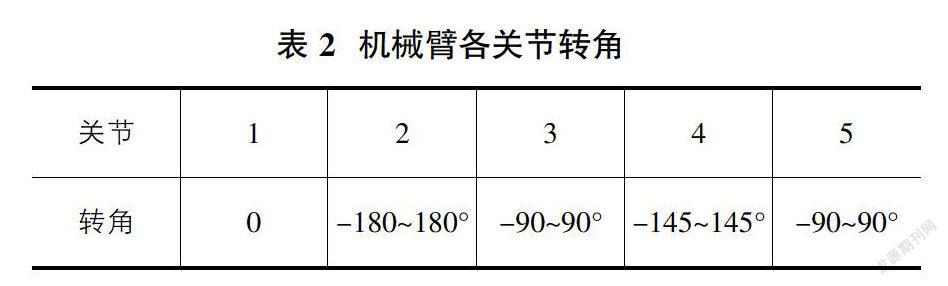
工作空間是機(jī)器人末端執(zhí)行器能夠到達(dá)空間所有點(diǎn)的集合,反映末端執(zhí)行器的位置。蒙特卡洛法是借助于隨機(jī)抽樣(偽隨機(jī)數(shù))來(lái)進(jìn)行數(shù)學(xué)問(wèn)題分析的一種數(shù)值方法[10],采用蒙特卡洛法[11-12]完成機(jī)械臂能夠到達(dá)空間內(nèi)的點(diǎn)集的采集,展現(xiàn)機(jī)械臂的工作空間。利用MATLAB中的Rand函數(shù)得到各個(gè)關(guān)節(jié)隨機(jī)組合形成的末端點(diǎn)集(theta(i)=thetamin(i)+(thetamax(i)-thetamin(i))*rand)。蒙特卡洛法核心為隨機(jī)取樣,故隨機(jī)取樣點(diǎn)數(shù)目越多,計(jì)算結(jié)果越準(zhǔn)確,本文由于計(jì)算機(jī)配置原因,設(shè)置取樣點(diǎn)數(shù)為10000,利用plot3函數(shù),MATLAB生成點(diǎn)云,即機(jī)械臂末端執(zhí)行器在基坐標(biāo)系中的位置點(diǎn)集,如圖3所示。
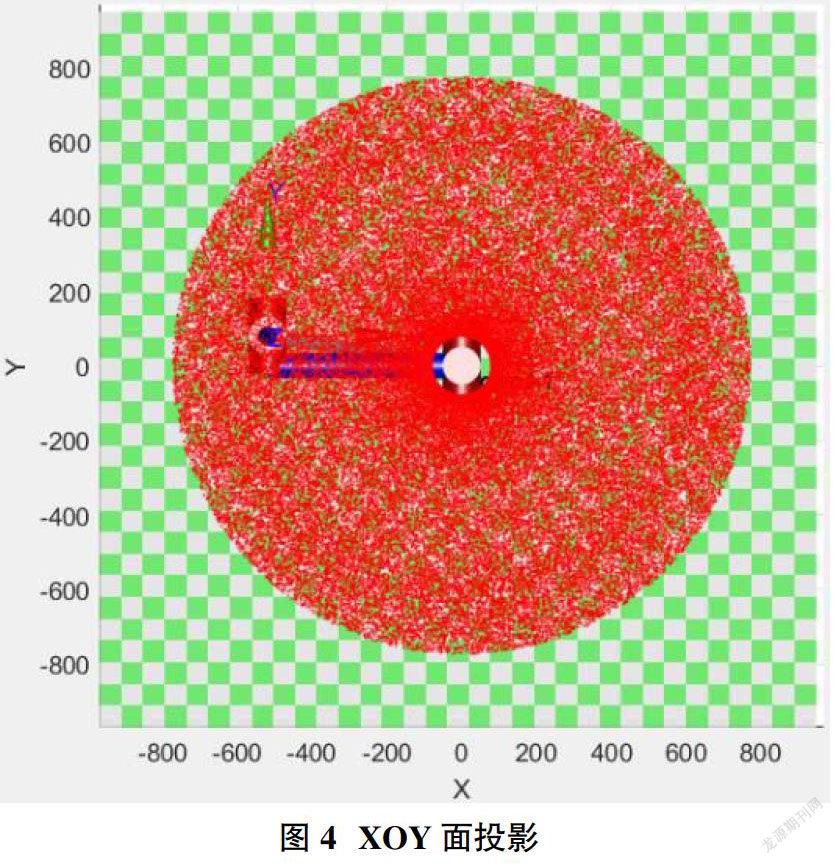
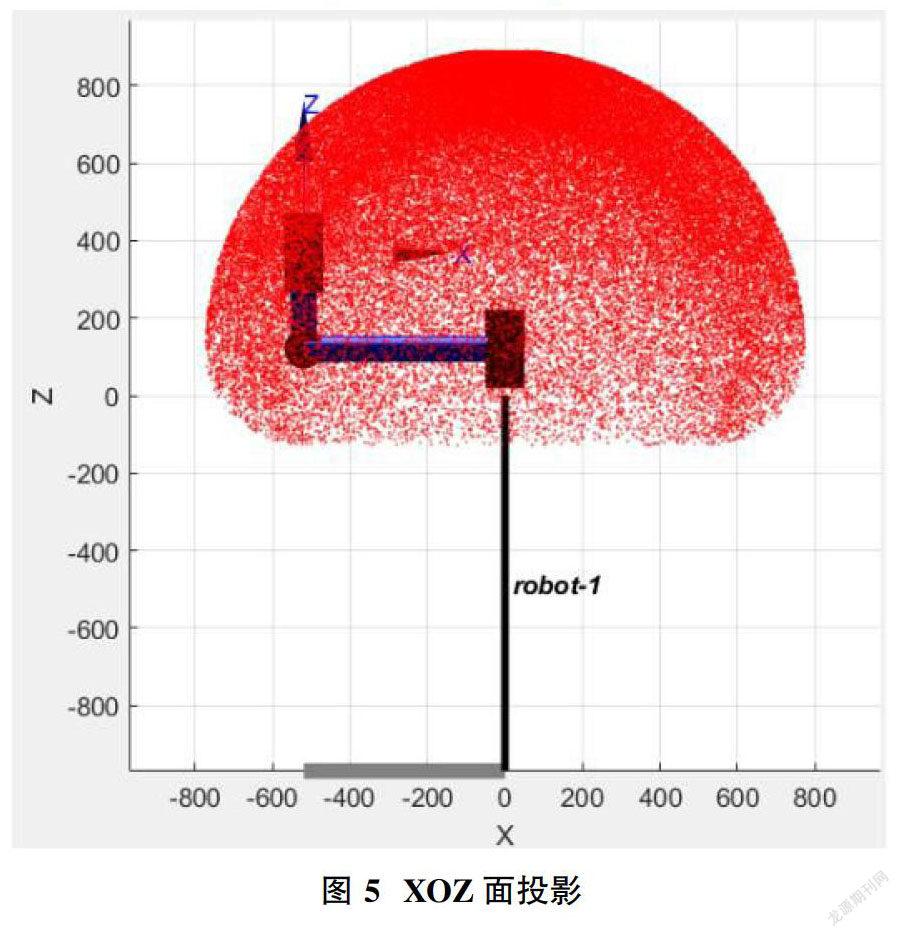
各關(guān)節(jié)轉(zhuǎn)角如表2所示,得到工作空間在XOY平面、YOZ平面、XOZ平面的投影,如圖4、圖5、圖6所示。
5? 結(jié)論
針對(duì)CFETR包層維護(hù)設(shè)計(jì)五自由度冗余機(jī)械臂,利用改進(jìn)型D-H參數(shù)法構(gòu)建出機(jī)械臂運(yùn)動(dòng)學(xué)的數(shù)學(xué)模型,對(duì)正運(yùn)動(dòng)學(xué)、逆運(yùn)動(dòng)學(xué)分析,求解出機(jī)械臂正、逆工作方程的數(shù)學(xué)函數(shù)公式和運(yùn)算求解過(guò)程。通過(guò)MATLAB軟件中的機(jī)器人工具箱,對(duì)機(jī)械臂位姿仿真,驗(yàn)證機(jī)械臂正、逆運(yùn)動(dòng)學(xué)的準(zhǔn)確性。對(duì)結(jié)果分析,確定結(jié)果與公式推導(dǎo)的數(shù)值基本一致,證明其準(zhǔn)確性。通過(guò)蒙特卡洛法研究機(jī)械臂的工作空間,了解末端執(zhí)行器所能到達(dá)的極限位置,確保其完成工作任務(wù),為同類(lèi)機(jī)械臂的研究提供參考和研究基礎(chǔ)。
參考文獻(xiàn):
[1]邱勵(lì)儉.聚變能及其應(yīng)用[M].北京:科學(xué)出版社,2008:17-18.
[2]ZHOU Zibo,YAO Damao,ZI Pengfei.The research activities on re-mote handling system for CFETR[J].Fusion Engineering and Desing,2015(34):232-237.
[3]Kakudate S, Takeda N, et al. R&D Activities for ITER Blanket Remote Handling Equipment[J]. Fusion Engineering and Design, 2014.
[4]鄭宇飛.基于人機(jī)工程學(xué)智能輪椅的設(shè)計(jì)與研究[D].合肥:合肥工業(yè)大學(xué),2016:29-30.
[5]楊樹(shù)風(fēng).帶有機(jī)械臂的全方位移動(dòng)機(jī)器人的研制[D].哈爾濱:哈爾濱工業(yè)大學(xué),2006.
[6]陸佳皓,平雪良,李朝陽(yáng).基于MATLAB Robotic Toolbox的關(guān)節(jié)型機(jī)器人運(yùn)動(dòng)仿真研究[J].機(jī)床與液壓,2017,45(17):60-62,81.
[7]周東輝.七自由度機(jī)器人逆運(yùn)動(dòng)學(xué)研究[J].山東輕工業(yè)學(xué)院學(xué)報(bào)(自然科學(xué)版),1995(04):56-61.
[8]李鑫,潘松峰, 尹寧寧,等.六自由度串聯(lián)機(jī)器人控制系統(tǒng)設(shè)計(jì)[J].青島大學(xué)學(xué)報(bào)(工程技術(shù)版),2017,32(02):108-111.
[9]陳賽旋.協(xié)作機(jī)器人零力控制與碰撞檢測(cè)技術(shù)研究[D].合肥:中國(guó)科學(xué)技術(shù)大學(xué),2018.
[10]趙智遠(yuǎn),徐振邦,何俊培,賀帥,徐策.基于工作空間分析的9自由度超冗余串聯(lián)機(jī)械臂構(gòu)型優(yōu)化[J].機(jī)械工程學(xué)報(bào),2019,55(21):51-63.
[11]劉亞?wèn)|.噴漿機(jī)械手定位誤差與運(yùn)動(dòng)模式優(yōu)化研究[D]. 長(zhǎng)沙:中南大學(xué),2013.
[12]胡明偉,王洪光,等.—種協(xié)作型機(jī)器人運(yùn)動(dòng)性能分析與仿真[J].智能系統(tǒng)學(xué)報(bào),2017,12(1):75-81.
猜你喜歡
科技與創(chuàng)新(2016年23期)2017-03-30 04:12:23
中國(guó)科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業(yè)技術(shù)(2017年4期)2017-03-28 07:56:48
求知導(dǎo)刊(2017年1期)2017-03-24 22:25:58
物聯(lián)網(wǎng)技術(shù)(2017年2期)2017-03-15 17:04:47
中國(guó)科技博覽(2016年27期)2017-01-23 01:32:28
農(nóng)機(jī)使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學(xué)學(xué)報(bào)·自然科學(xué)版(2016年1期)2016-12-14 22:15:06
計(jì)算機(jī)教育(2016年7期)2016-11-10 09:01:27
中國(guó)科技博覽(2016年9期)2016-04-25 10:13:28