用于調控中心自動化智慧機房的機器人巡檢控制系統分析
2021-09-10 07:22:44陳江堯俞佳樂陳冰惲楊健一陳明強汪力
科技研究 2021年15期
陳江堯 俞佳樂 陳冰惲 楊健一 陳明強 汪力
摘要:控制系統是基于主體、客體以及媒體綜合構成的一種綜合控制體系,其最終目的是保證控制對象滿足期望需求或實現其在某些方面的功能提升和管理。本文就基于調控中心自動化智慧機房巡視、檢查的需求,基于機器人的前提下,設計用于機器人控制系統,實現機房環境的巡檢、監控等,實時掌握調控中心自動化智慧機房的整體情況,例如消防巡檢、防盜巡檢等,保障調度中心自動化智慧機房的安全、穩定地運行。
關鍵詞:調控中心;智慧機房;機器人巡檢;控制系統
1 系統架構
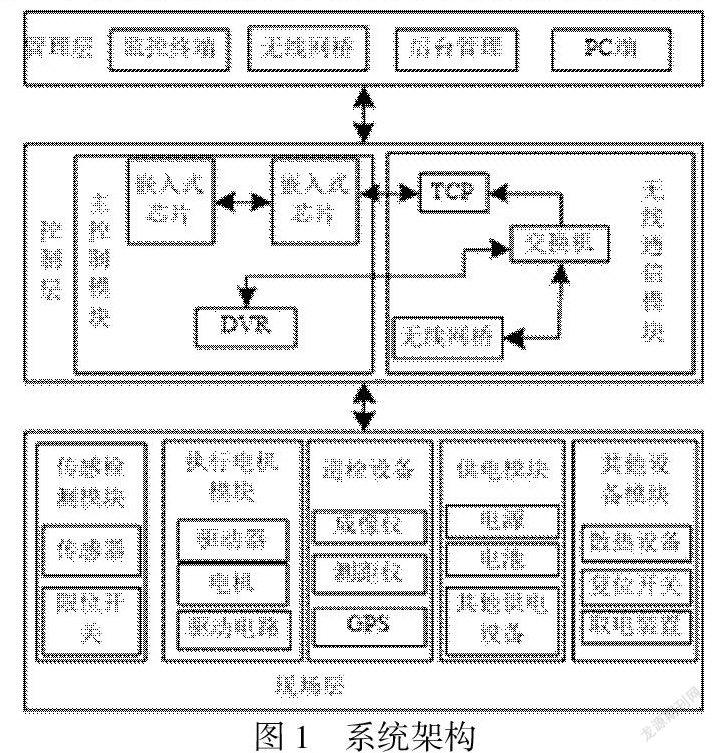
該巡檢系統以分布式控制的方式完成調控中心自動化智慧機房巡檢。系統的現場層獲取巡檢區域現場信息和數據,將其傳送至控制層,該層通過無線通信模塊將現場層獲取的數據和信息實行相應處理,通過控制模塊向機器人終端下達控制指令,機器人完成指令后,通過無線網絡,將結果傳送至管理層,實行監控以及管理。系統分為三個層次,現場層、控制層和管理層,其結構如圖1所示:
現場層:該層主要包含傳感檢測模塊、執行電機模塊、巡檢設備、供電模塊以及其他設備模塊,該層以嵌入式技術部署在機器人終端內,該層也可看作為機器人終端。
(1)傳感檢測模塊:該模塊通過數個光電傳感器和限位開關組成,用于實現巡檢目標設定、障礙物的識別、人員匹配,同時,可用于完成機器人的姿勢定位。
(2)執行電機模塊:該模塊包含驅動器、電機和驅動電路,該模塊通過驅動器完成機器人本體的運動控制,同時完成機器人各個關節的協調控制,保證機器人在直線行駛、轉彎行駛、加速、減速以及停止操作時穩定、精準控制,實現巡檢。
(3)供電模塊:該模塊包含直流電源、電池以及穩壓器等設備,其用于機器人整體運行的電源提供,保證機器人的運行;同時也用于實現網絡設備的供電保障。
(4)其他設備模塊:該模塊包含散入設備、復位開關以及取點裝置,其中復位開關是用于機器人復位的控制,該復位指令是由控制層下達。
控制層:該層主要通過主控制器模塊和無線通信模塊構成,以嵌入式控制芯片為核心,主要完成傳感數據的處理、巡檢圖像處理等;通過通信協議實現與管理層間的通信以及數據傳輸,可通過該層下達機器人巡檢指令[,同時該層也用于保存自主巡檢列表的存儲。
管理層:該層主要用于系統后臺服務部分,實現巡檢結果的監控、系統相關設置、維護、管理等,該層包含地面基站和PC客戶端,可通過監控顯示器查看機器人巡檢現場的圖片以及視頻[11],根據查看結果通過控制層下達相應指令或者處理。
2執行電機模塊
巡檢機器人的本體控制是由現場層的執行電機模塊完成,機器人的驅動主要通過不同類型的板卡,板卡中設有兩種通道,分別為轉換和計數通道,用于完成各類數據的統計和格式轉換;同時還設有開關量輸入輸出,其為可編程。其中,智能驅動器用于控制機器人的行駛效率以及行駛安全,控制執行是依據設定或者實時指令,通過串口和工控機的連接完成執行命令的傳送[12];其他部分的控制通過驅動器組完成,但其不用于控制速度伺服,工控機的加、減速,行駛方向和剎車的控制,通過D/A等控制驅動器實現。
3嵌入式芯片
機器人在巡檢過程中軌跡跟蹤的實現是以該芯片完成。其軌跡跟蹤包含兩部分,分別為速度跟蹤、軌跡跟蹤。兩者均嵌入在機器人內部,通過主機對其實行控制[13]。主機完成軌跡設定后,將其傳送至控制器,速度控制器接收速度控制指令,其來自由軌跡跟蹤器;輸入電壓通過電機的驅動完成輸入,完成機器人巡檢的軌跡跟蹤。
嵌入式芯片作為驅動核心,電機驅動是基于其控制完成,文中選擇輸出時最大電流可達到5 A的MC33886芯片。為保證良好的驅動效果,需連接兩塊同樣型號的芯片,以并聯模式完成,可將最大輸出電流提升一倍,達到10 A。
依據PWM信號完成芯片的驅動,PWM的擴展通過單片機完成,并且通信的實現是基于串行接口,可提升控制信號的傳輸效率。依據PWM信號完成芯片的驅動,PWM的擴展通過單片機完成,并且通信的實現是基于串行接口,可提升控制信號的傳輸效率。
4結語
由于電力系統機房內設備數量較大、調度使用的相關服務器較多,導致機房管理、監控等相關工作量日益增多,人員作業已經無法滿足全部管理和監控需求,智能化、自動化的機器人巡檢成為主要方式。為保證機器人在該機房的巡檢效果,本文設計用于控制機器人巡檢的控制系統,保證機房區域的有效、可靠監測。經測試:該系統控制性能良好,可控制機器人準確完成巡檢軌跡跟蹤,具備精準的障礙識別以及測距功能,按照設定巡檢路線以及巡檢內容,精準完成區域巡檢,并可監測區域內人員匹配情況,可用于完成防盜竊問題出現。除此之外,系統可精準控制機器人的巡檢行駛速度,提升巡檢效率,并且可實現機器人的自主巡檢,實時保證機房的安全。
參考文獻:
[1]王秋敏,李新華,王明瑞.配電室智能巡檢機器人的設計與研制[J].機床與液壓,2019,47(17):51-55.
[2]彭向陽,金亮,王柯,等.變電站機器人智能巡檢系統設計及應用[J].中國電力,2018,51(02):82-89.
[3]王吉岱,徐東曉,孫愛芹,等.基于多傳感器信息融合的輸電線路巡檢機器人自主越障方法研究[J].機床與液壓,2020,48(09):24-28.