基于單目視覺的測距算法綜述
2021-09-10 03:43:24敖宏偉陳學(xué)文陳華清
交通科技與管理 2021年19期
關(guān)鍵詞:機器視覺
敖宏偉 陳學(xué)文 陳華清
摘 要:機器視覺作為人工智能的一個分支,近些年由于無人駕駛技術(shù)的興起正在得到飛速高且高效的發(fā)展,機器視覺,本質(zhì)上是用機器的識別方式來代替人眼功能的一種方式,對前方物體做出識別和測量,基于機器視覺的測距算法,現(xiàn)已是汽車安智能安全輔助駕駛研究領(lǐng)域的一個熱點問題,本文介紹了基于機器視覺的前方車輛距離估計的研究背景和特點,對國內(nèi)外的研究情況進行了闡述,對單目測距距系統(tǒng)模型的搭建進行總結(jié)與分析,并對其發(fā)展方向進行展望。
關(guān)鍵詞:無人駕駛技術(shù);機器視覺;單目測距
0 前言
機器視覺測距所采集數(shù)據(jù)的方式為動態(tài)測距,與現(xiàn)如今市面上的測距儀器數(shù)據(jù)采集的類別相比,例如微波雷達、激光雷達、超聲波雷達相比,其采集信息的方式相對是不可侵犯的,對外界環(huán)境信號傳播相對保守,該測距方式采用類似人眼感知的視覺方式,便于視覺化、立體化,也更方便快捷,同時該測距方式應(yīng)用范圍廣,特別是智能交通系統(tǒng)中。本文將介紹基于機器視覺中單目視覺的測距算法研究背景和特點,對國內(nèi)外的研究情況進行闡述,對測距算法模型的搭建進行總結(jié)與分析,并對其發(fā)展方向進行展望。
1 單目視覺測距算法原理
計算機視覺測距算法中,單目攝像頭所采用的測距原理是,首先通過圖像匹配對目標(biāo)進行精確識別,例如各種物體,植物,行人,機動車等,再通過所識別出目標(biāo)在圖像中的顯示大小去估算攝像機與目標(biāo)的距離。其中分為低速和高速場景,低速場景一般用于檢測地面標(biāo)識,高速場景一般用于檢測前方動態(tài)物體等,兩種測距方法都是基于地面假設(shè)的前提,因為單個攝像頭不存在空間信息,因此單目攝像頭的圖像數(shù)據(jù)采集原理是,將客觀世界的三維場景投影到CCD攝相機的光敏矩陣表面,基于小孔成像原理的測距模型,測距需要事先知道物體的實際尺寸,但這樣的條件基本上不能夠滿足,因此這種方法雖然簡單,但是不適合采用,現(xiàn)如今市面上多采用基于單幀靜態(tài)圖像的測距模型來滿足前方所測距車輛識別的測距要求。
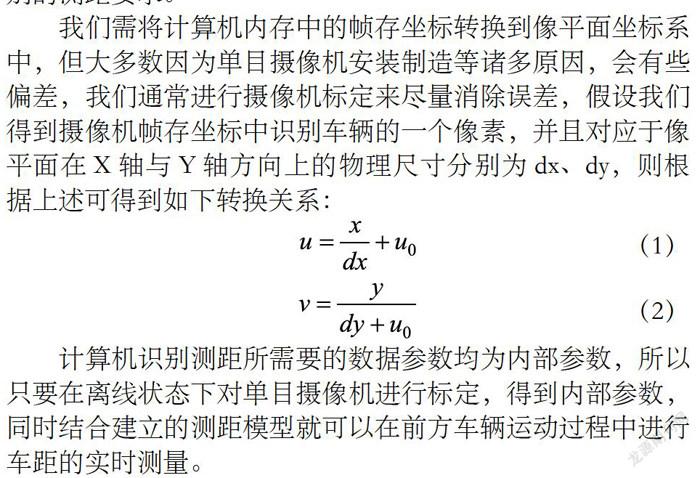
我們需將計算機內(nèi)存中的幀存坐標(biāo)轉(zhuǎn)換到像平面坐標(biāo)系中,但大多數(shù)因為單目攝像機安裝制造等諸多原因,會有些偏差,我們通常進行攝像機標(biāo)定來盡量消除誤差,假設(shè)我們得到攝像機幀存坐標(biāo)中識別車輛的一個像素,并且對應(yīng)于像平面在X軸與Y軸方向上的物理尺寸分別為dx、dy,則根據(jù)上述可得到如下轉(zhuǎn)換關(guān)系:
(1)
(2)
計算機識別測距所需要的數(shù)據(jù)參數(shù)均為內(nèi)部參數(shù),所以只要在離線狀態(tài)下對單目攝像機進行標(biāo)定,得到內(nèi)部參數(shù),同時結(jié)合建立的測距模型就可以在前方車輛運動過程中進行車距的實時測量。
1.1 國內(nèi)研究現(xiàn)狀
蘇萍等[1]提出了首先將Mask R-CNN模型訓(xùn)練好,再利用訓(xùn)練好的模型對前方物體進行檢測和識別,然后利用單目測距方法對前方物體進行距離測量,主要方法是利用改進的基于小孔成像原理,該方法模型簡單,檢測魯棒性較好,但是局限性較大,僅能測量出靜止物體到攝像頭的距離。黃同愿等[2]提出了一種對于行人的識別與測距算法,結(jié)合深度學(xué)習(xí)YOLOV3算法,通過改進邊界框并對子圖進行多次篩選得到行人檢測框,并在傳統(tǒng)相似三角形原理基礎(chǔ)之上,建立數(shù)學(xué)模型中融入了俯仰角和偏航角,充分考慮了相機姿態(tài)角對測量精度的影響,并且該算法對相機安裝要求低,具有更好的實用性。許洋等[3]也同樣利用深度學(xué)習(xí)算法,首先檢測需要識別的目標(biāo)車輛,再依據(jù)卡爾曼濾波算法對前方車輛進行跟蹤和狀態(tài)識別,最后依靠相似三角形原理和投影模型,對車輛進行跟蹤測距,實驗結(jié)果表明,該算法能在車輛繁雜多樣交通環(huán)境下,有效的對車輛進行跟蹤定位的基礎(chǔ)之上實現(xiàn)距離測量,并且降低誤檢漏撿率。陳俊廷等[4]為AGV小車設(shè)計了一種基于車輛投影寬度的測距算法,已知攝像頭焦距,車輛的實際寬度及車輛的像素寬度,根據(jù)相似三角形的比例關(guān)系,即可得到攝像頭與前車的實際距離,該算法不需要復(fù)雜的數(shù)學(xué)推導(dǎo)模型,且避免了俯仰角對測距結(jié)果的影響。
1.2 國外研究現(xiàn)狀
Chao Shen等[5]為了應(yīng)對由于光照變化和視點變化原因帶來的測量誤差,利用一種端到端的卷積神經(jīng)網(wǎng)絡(luò)框架來實現(xiàn)車輛的檢測和測距,該算法是將RGB信息轉(zhuǎn)化成深度信息,再結(jié)合檢測模塊作為輸入,最后根據(jù)距離模塊和得到的深度信息來預(yù)測距離,魯棒性較好,降低了由于光照不足,遮擋等復(fù)雜駕駛環(huán)境帶來的測距誤差。Sana等[6]為ADAS設(shè)計了一種由單目攝像機獲得距離的測距算法,算法采用消失點檢測、車道線提取和三維空間車輛檢測相結(jié)合的方式來實現(xiàn)測距,但是由于算法的局限性,在光照不足和前方障礙物遮擋嚴(yán)重的情況下,距離誤差會顯著增大,且該算法不適合所有車輛。Jong等[7]設(shè)計了一種黑匣子,從分辨率不同的圖像中提取信道特征,基于逆透視映射識別目標(biāo)和鳥瞰圖方式測距,該算法對攝像機安裝精度較高。Zewei Liu等[8],為提高駕駛員的安全性,設(shè)計了一種用于視覺輔助駕駛系統(tǒng)的檢測與測距算法,首先用常規(guī)方法檢測出車輛,然后利用卡爾曼濾波對車輛進行跟蹤,最后進行距離估計,該算法可以對目標(biāo)進行跟蹤,避免漏檢、誤檢目標(biāo),且精度和實時性較好。
2 機器視覺測距算法發(fā)展與展望
隨著人工智能的興起,機器視覺測距算法已經(jīng)相對成熟,并且眾多算法在各種智能產(chǎn)品上已經(jīng)得到了應(yīng)用,并且隨著人工智能不斷的發(fā)展和5G的實現(xiàn),機器視覺測距依然存在著很大的發(fā)展空間,目前,機器視覺測距最大的問題依然是光照條件的影響和環(huán)境復(fù)雜多樣化帶來的測量誤差,同時,攝像機鏡頭自身抖動的問題也需要進一步克服,但不得不說,計算機視覺測距不僅識別目標(biāo)信息完整,探測范圍較寬、相對于其他設(shè)備價格相對便宜,而且更符合人們的認(rèn)知習(xí)慣等優(yōu)勢,特別在對道路及分道線的探測方面,視覺信號具有無法替代的優(yōu)勢,所以,在未來一段時間,機器視覺測距的研究熱潮必將上升到一個新時期。
參考文獻:
[1]蘇萍,朱曉輝.基于單目視覺的水面目標(biāo)識別與測距方法研究[J].計算機技術(shù)與發(fā)展,2021,31(2):80-84.
[2]黃同愿,楊雪姣,向國徽,等.基于單目視覺的小目標(biāo)行人檢測與測距研究[J].計算機科學(xué),2020,47(11):205-211.
[3]許洋,趙亞男,高利,等.基于單目視覺的車輛檢測與跟蹤[J].激光雜志,2020,41(5):18-22.
[4]陳俊廷,劉翔,翟岳仙,等.基于單目視覺的AGV間防撞系統(tǒng)設(shè)計[J].智能計算機與應(yīng)用,2020,10(3):98-100.
[5]Chao Shen,Xiangmo Zhao,Zhanwen Liu,Tao Gao,Jiang Xu.Joint vehicle detection and distance prediction via monocular depth estimation[J].IET Intelligent Transport Systems,2020,14(7).
[6]Sana Bougharriou,F(xiàn)ay?al Hamdaoui,Abdellatif Mtibaa.Vehicles distance estimation using detection of vanishing point[J].Engineering Computations,2019,36(9).
[7]Jong Bae Kim.Efficient Vehicle Detection and Distance Estimation Based on Aggregated Channel Features and Inverse Perspective Mapping from a Single Camera[J].Symmetry,2019,11(10).
[8]Zewei Liu,Dongming Lu,Weixian Qian,Kan Ren,Jun Zhang,Liwei Xu.Vision-based inter-vehicle distance estimation for driver alarm system[J].IET Intelligent Transport Systems,2019,13(6).
猜你喜歡
軟件導(dǎo)刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(shù)(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導(dǎo)刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30