一種被動越障機構的設計
2021-09-10 03:59:17陳世豪劉思雨王守海高巳淇齊迎春
科技風 2021年25期
關鍵詞:機械
陳世豪 劉思雨 王守海 高巳淇 齊迎春
摘 要:隨著我國人口老齡化問題越來越嚴重以及肢體殘疾人數量的逐步增加,對輔助步行工具的需求日益增高。但隨城市化的不斷加快,樓梯和跨越路障等不斷增加,所以研究一款簡單且價格普通的越障機構很有必要。因此基于連桿機構工作原理和易于操控的思想,設計了一款輪組式越障機構。該結構在實現能夠簡單地抬升的同時,沒有任何電力的應用,純粹利用機械結構來完成,安全性更高,可靠性更高。
關鍵詞:越障;輪組;機械
The Design of a Passive Obstacle-crossing Function
Chen Shihao Liu Siyu Wang Shouhai Gao Siqi Qi Yingchun
College of Biological and Agricultural Engineering JLU JilinChangchun 130022
Abstract:With the aging of China's population and the gradual increase in the number of physical disabilities,the demand for assisted walking tools is increasing.However,with the acceleration of urbanization,staircases and roadblocks are increasing,so it is necessary to study a simple and affordable barrier surmounting mechanism.When the actuator is driving on the flat ground,each small wheel rotates around its own axis.When climbing the stairs,the wheels revolve around the central axis.The structure can be simply lifted at the same time,there is no electrical application,purely using mechanical structure to complete,higher safety,higher reliability.
Keywords:obstacle crossing;wheel group;machinery
當今社會迅速發展,城市化進程加快,人們生活環境處處都發生了巨大變化,土路坡路修成臺階,人行道高出車道,而與此同時,對行為能力較弱的老年人和殘疾人等社會弱勢群體來說,卻增添了生活中的不便。普通輪椅難以越過臺階、馬路沿等障礙,而市面上零星幾種的越障輪椅大多由國外進口、價格高,因此,在這種情況下,研究一款簡單且價格普通的越障機構,成了方便老年人、殘疾人生活的當務之急。
1 研究背景
目前在爬樓梯、越障裝置的研究領域內,國外研究開始較早,一些技術已投入市場但價格較貴,相當于中低檔轎車的價格。近年來我國相關專利也屢見不鮮,不同的爬樓梯裝置適用于不同的環境和條件,各有利弊。按照爬樓執行機構的類型,主要可歸結為輪組式、履帶式、腿式三類。我們旨在設計出一款可將輪椅從地面抬升至指定高度并在此過程中保持平穩的輪組式越障裝置,主要針對的是老年人和殘疾人輪椅出行應對非鋪裝路面或一定程度的臺階攀爬。應用本裝置可以很大程度上節省越過障礙時的人力消耗,它所能達到的效果是:節省空間、節省人力、低成本、免維護、使用方便、出行便捷。
2 總體結構設計
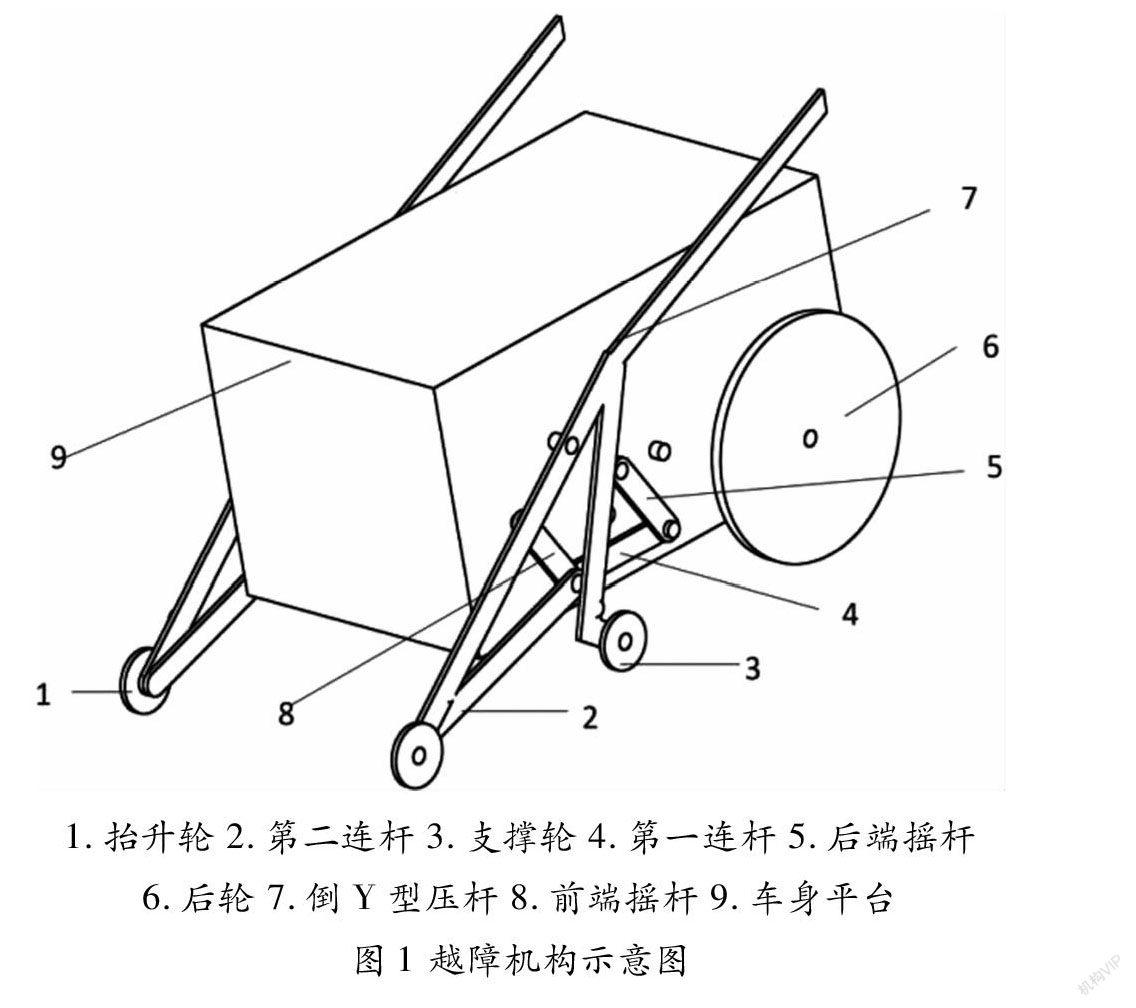
如圖1所示為設計的越障機構結構簡圖,主要由座椅、腳踏板、3組車輪、推桿及三組連桿等主要機構組成。座椅與壓桿直接連接,與抬升輪通過一連桿機構連接。連接抬升輪的兩連桿機構間通過一平行四邊形結構連接,起到增強穩定性作用。兩支撐輪上方桿件也由一桿相連。此機構純依靠機械結構運動,由操控者施加動力,推動車體前行,或后輪上安裝動力裝置,車體上的越障機構在操控者控制下完成越障,使此越障機構通過性更強,且安全穩定。
3 越障原理
4 越障過程
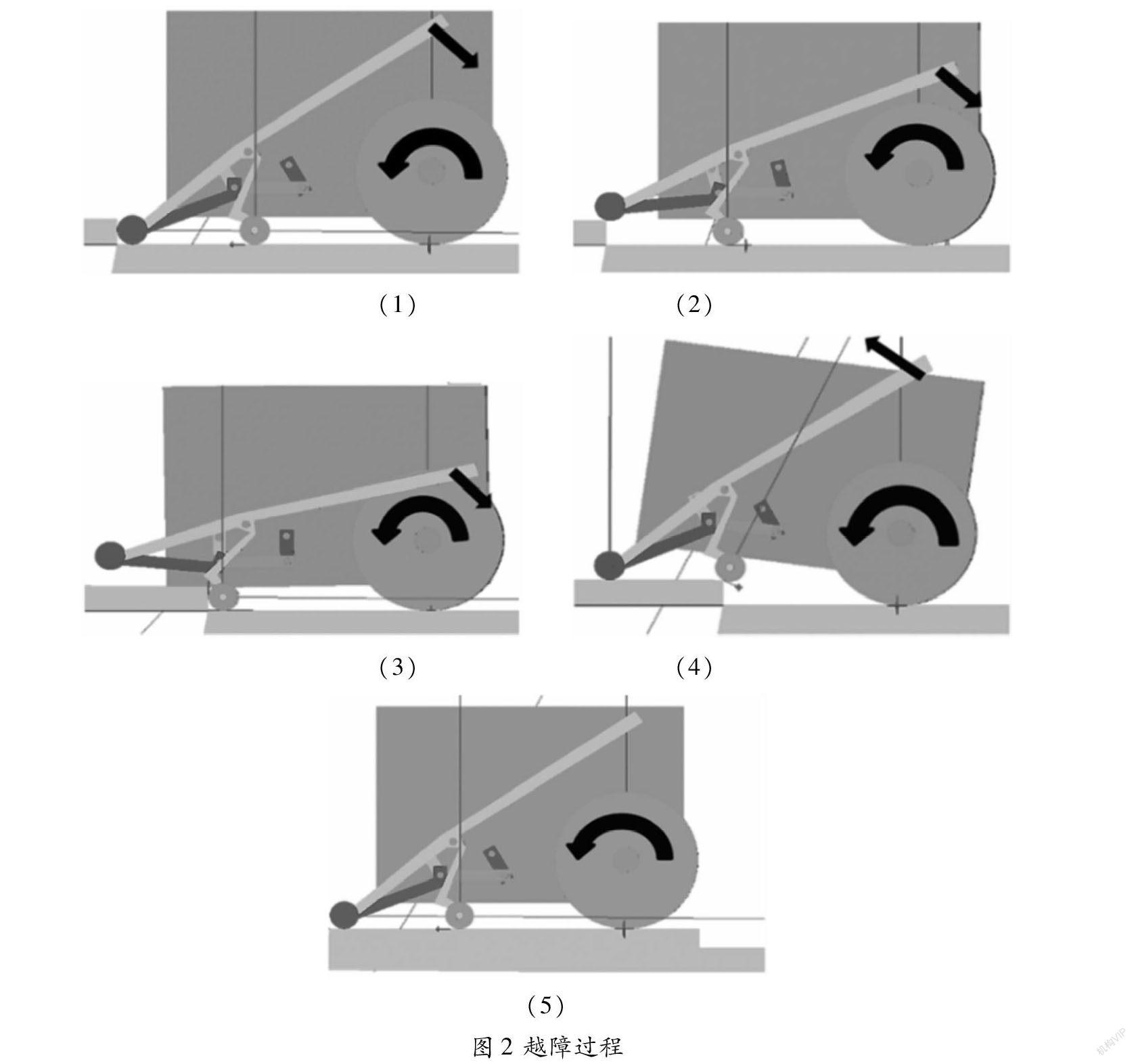
圖2所示為所設計越障機構的越障過程。行駛時,操控者推動或后輪驅動車體前行,越障機構處于初始狀態,三組輪子分別著地。裝有被動越障機構的車體在遇到障礙時,操控者手壓Y字連桿7,前輪在平行四桿機構的限位下,升到一定高度便停止,此時前輪可以輕松越過一定高度的障礙如圖2(1)、(2)所示,支撐輪3及后輪6與地面接觸,維持車體平衡且繼續前行;當支撐輪3接觸到障礙時,放松Y字壓桿,且稍上拉Y字壓桿,使支撐輪3翹起,在平行四桿機構的限位下,支撐輪3升到一定的高度便停止,隨著車體前行翻越障礙,如圖2(3)、(5)所示,車體上裝有壓桿限位機構,控制壓桿轉動角度,以控制抬升輪抬升高度,保證越障安全;當抬升輪和支撐輪越過障礙后,操控者放松壓桿7,抬升輪和支撐輪下落地面,隨著車體前行,后輪翻越障礙,完成越障。三組輪子越障過程中,由桿4、5、8等組成的連桿機構確保抬升輪和支撐輪的運動協調性和限位。使用時,遇到障礙人體重心靠近后輪,可輕易地通過壓桿控制抬升輪與支撐輪。
5 創新點
本機構與傳統機構的區別在于,傳統機構在實現前輪越障時,需要以后輪為支點抬起車體的前半身,由杠桿原理,此時動力臂較短,并且由于車體的前半身較重,阻力相對較大,需要的抬升力較大且由于后輪的不穩定,導致抬升過程不穩定,不易控制。本機構增加了一對Y型壓桿,使得前輪和車體不再固聯,在抬升過程中只需要抬升前輪的重量,由于支撐輪的存在,使得抬升過程的動力臂較長達到省力的目的,并且能在抬升過程中起到支撐作用,使車身保持穩定。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09