基于ASM算法的接觸網吊弦缺陷檢測方法研究
2021-09-10 02:58:10白青林喬梅
中國設備工程 2021年16期
白青林,喬梅
(北京市軌道運營有限公司,北京 100000)
電氣化鐵路的安全穩定運行對牽引供電系統要求較高,接觸網設備是鐵路基礎設施的重要組成部分,其良好的運用狀態是電力機車、動車組正常運行及運輸組織暢通的前提條件之一。接觸網懸掛裝置的故障診斷歷經了從人工判別到自動化識別的過程,人工識別采集接觸網元器件圖片的效率不能滿足列車運行要求。吊弦是接觸網系統檢測的重要部件之一,吊弦缺陷主要可分為吊弦斷裂、吊弦不受力、吊弦散股、螺栓松脫、雞心環斷開等缺陷類型,吊弦是鏈形懸掛的重要組成部件之一,利用調節吊弦的長短來保證接觸懸掛的結構高度、接觸線的松弛度、接觸線距軌面的高度以及線岔處的水平、抬高,改善接觸懸掛的彈性,調整接觸線的弛度,保證接觸線與受電弓良好滑擦,提高電力機車受電弓取流質量,因此,吊弦缺陷檢測是極其必要的。本文為提升對吊弦的檢測能力,對接觸網吊弦缺陷檢測算法應用展開研究,構建基于ASM(active shape model)算法,通過構建吊弦檢測流程,對接觸網圖像進行預處理與分割技術處理,利用ASM算法,實現對吊弦缺陷的準確識別,通過選取真實路段上的吊弦缺陷進行檢測,驗證算法的準確性與可行性。
1 吊弦圖像預處理與分割
為了提高對吊弦缺陷檢測的精度,需制定專門的檢測流程,如圖1所示。
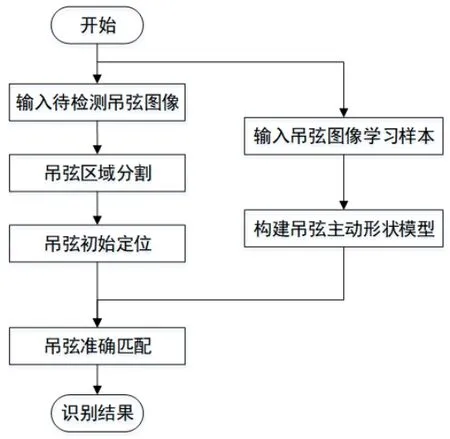
圖1 吊弦檢測流程圖
1.1 吊弦圖像預處理
利用計算機圖像處理技術,將彩色圖像數據進行灰度化處理,利用灰度圖片局部亮度的分布與特征替代彩色圖片數據中的圖像整體特性,在保證辨識率的同時,得到辨識率更高的灰色圖像。灰度處理中常用到三種處理方法,分別為平均值法、最大值法、加權平均法,本方案選取加權平均值。加權平均值法中,將彩色圖像數據中每個像素點的基本像素賦予不同的權重值,根據理論研究可知,G分量識別率高于R分量高于B分量,將圖像灰度化處理后,為得到更好的顯示效果,分別賦予G、R、B分量0.59、0.3、0.11的權重,將加權平均取值得到的結果替代原有彩色圖像數據中R、G、B像素點值,即:

攝像機拍攝得到圖像會存在噪聲干擾。噪聲干擾嚴重影響圖片清晰度與識別度,模糊的圖像信息對圖像的提取分析結果精度造成較大干擾,為提升圖像信息的識別度,圖像去噪處理的必要環節,選取中值濾波器。
中值濾波是一種典型的非線性濾波算法,在實際應用中,該濾波對處理圖像細節的模糊、除脈沖干擾和孤立噪聲干擾等效果顯著。中值濾波算法將圖像劃分為若干個窗口,選取所需計算數據點的窗口,將窗口中的數據提取出奇數個數據點,將提取后的數據點按照大小進行排序,位于中間位置的像素點作為替代原有數據點。中值濾波器可以完成圖片中所有窗口中的像素中值濾波處理,即:

通過去噪后的圖像還需要增強畫質,以便用于后續的剪裁和定位。由于某些情況,拍攝的圖片會相對模糊,并不能很好地符合要求。因此需要對圖像進行增處理,選取限制對比度自適應直方圖法。該方法通過限制直方圖的部分區域的高度達到限制對比的增強幅度,由此可以限制噪聲及對比度的過度增大,來改善圖片的畫質。
假設圖片的大小為N×N,其局部映射函數為:

式中,CDF(i)表示圖片的累積分布函數,其求導為直方圖Hist(i),由此可以計算出n(i)的斜率M:

計算得到的斜率為圖片對比度增大的程度函數,要限制其增大的幅度才能保證有效地去噪。設定斜率的最大值為Mmax,則:

在保證圖片不發生損耗或面積變化的前提下,均衡后的高度不能大于Hmax。設定一個閾值T,在此處對圖片進行裁剪,同時將裁去的部分均勻地分布在灰階范圍內,由此受電弓的直方圖的高度會增大,假定為L,則Hmax=T+L
由此達到均衡后的直方圖為:

通過該方法處理的圖像灰度分布和原圖接近,且亮度差異很小,同時將特征區域的圖像對比度增強,突出了受電弓的細節,減少對細節的干擾,有效地限制圖像噪聲的放大,可以滿足后續的處理。
1.2 吊弦圖像分割
通過圖像的去噪和增強,片中包含的信息較多,還存在一定的其他設備的干擾。圖像分割就是實現干擾源與目標的分離、背景與目標的分離。通過圖像的分割將更有利于目標的識別和定位,選擇基于邊緣的方法。目標的邊緣是其重要的特征,而邊緣是圖像中灰度值在其相鄰的區域內存在局部突變現象,同時相互之間彼此連通的像素的集合,邊緣檢測的方法有效實現目標和背景分割。常用的邊緣檢測方法有很多,而基于Canny算法的邊緣檢測是一個可以實現濾波、圖像增強及檢測多階段的優化算法,其優點多,如檢測方向全、抵抗干擾能力強、封閉性好以及還原圖像信息能力強等。
2 吊弦ASM構建
ASM以點分布模型為基礎,選取樣本特征點進行訓練,訓練后的ASM 能夠得到特征點分布的統計信息,并以此為基礎對目標圖像特征點展開尋找。在ASM訓練中,需記錄樣本中的關鍵特征點的位置,特征點的具體位置可通過手動或者半自動標記,將計算得到的特征值的灰度模型中的值作為特征向量。吊弦ASM構建方法步驟如下:
2.1 吊弦學習樣本標定
吊弦圖像經過圖像預處理,完成去噪后,圖像中吊弦輪廓邊界點、角點位置較為清晰,將其設定為特征點,并人工對其進行標記。標記時,采用PDM對吊弦形狀進行描述,同時,每張吊弦圖像中設定數量相同的特征點,吊弦圖像的特征點數學表示與學校樣本集可表示為:

式中,N為特征點總數;M為圖像總數。
ASM訓練。ASM訓練主要包含特征點對齊與ASM建立兩部分。訓練步驟如下:
①將吊弦形狀xi進行重新排布,通過進行大小調整、位置變換等方式將其與xi對齊,得到變換后的形狀集合。
②對圖像進行平均處理。

③將平均形狀m進行大小調整、位置變換等排布調整,對齊。
④將x進行大小調整、位置變換等排布調整,對齊平均形狀m。
⑤重復跳轉至②步驟,直至平均形狀m出現收斂,停止對齊處理。
平均形狀收斂的評判依據為:

此時,圖像中各吊弦形狀與平均形狀之差的平方和最小;吊弦對齊時:

若x與訓練集是相關的合理形狀,該估計能較好地擬合真實形狀。
2.2 吊弦區域初步定位
為了縮短吊弦檢測的計算時間,提升檢測精度,需要對吊弦區域進行定位,去除多余的干擾像素。開展區域搜索可得到吊弦的整體圖像。具體步驟如下:
(1)在接觸線邊緣定位的特征點基礎上,將與其相交的兩條直線交點作為新的特征點,以交點為中心向左右延伸進行搜索。
(2)區域內包括兩條直線l1、l2,兩條直線傾斜角度分別為φ1、φ1,兩角度相差45°。
經過對吊弦位置進行區域搜索后,在輸入的邊緣圖像中進行曲線數據壓縮,將邊緣線段中長度較短的去除,利用Hough變換將左右兩個吊弦邊緣線段進行搜索,搜索控制在35~55°和125~145°范圍內,搜索完得到吊弦的初始定位區域。
2.3 吊弦檢測與識別
吊弦區域經過初步定位后并未達到精確識別與檢測的要求,需利用主動形狀模型學習算法對吊弦區域進行精確匹配。具體步驟如下:
(1)根據吊弦主動形狀模型中的平均形狀和吊弦的初始位置,初始化吊弦形狀,即。
(2)以吊弦初始定位中的標記點為基礎,向領域搜索,選定鄰域中的梯度值最大的像素點作為最佳目標位置;當鄰域中存在最佳目標點,標記點以最佳目標點為方向移動,若不存在,標記點原位置不變。
(3)標記點移動造成吊弦的初始形狀發生改變,初始形狀與移動后形狀之間存在位移向量,即:

(4)將姿態參數進行步驟(2)和(3)若干次后,對變換后姿態參數進行判斷,當姿態參數數值可忽略時,判定吊弦圖形的存在;反之不存在。
3 吊弦缺陷檢測實驗
本文采用某鐵路線段4C高清圖像作為訓練樣本,共計1000張,同時針對吊弦斷裂、吊弦不受力、吊弦散股三種吊弦常見缺陷,分別在50張無缺陷圖片中添加50張有缺陷測試圖像進行識別,驗證檢測算法的有效性;選取150張無缺陷圖像作為干擾因素,分別選取吊弦斷裂、吊弦不受力、吊弦散股等缺陷圖像各50張,統計算法的識別率,驗證算法的準確度。
3.1 吊弦的缺陷檢測實驗
針對吊弦斷裂、吊弦不受力、吊弦散股三種吊弦常見缺陷的共300張圖像中,吊弦斷裂、吊弦不受力、吊弦散股典型圖像各4張,經過算法檢測后,成功將12張存在缺陷的圖像識別出,檢測結果如圖2所示。
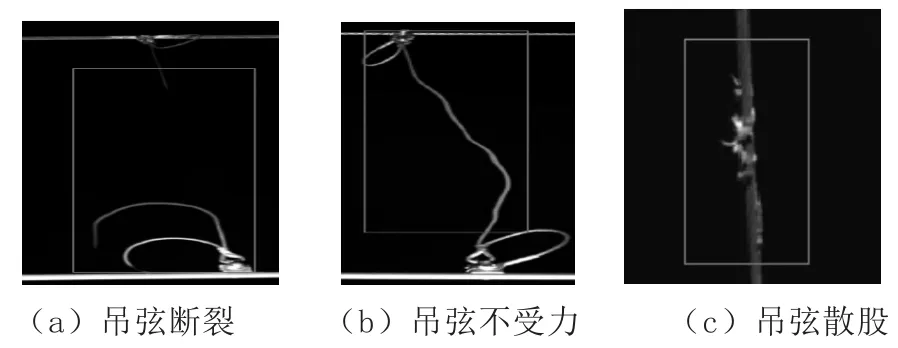
圖2 吊弦缺陷檢測圖
如圖2所示,經過算法檢測后,12張圖像被成功識別,缺陷點識別結果準確,并在圖中將缺陷位置進行了標記。
3.2 算法檢測準確性測試
為更加形象直觀地反映算法的準確性,對吊弦斷裂、吊弦不受力、吊弦散股、3種缺陷檢測效果進行統計,統計結果如表1所示。
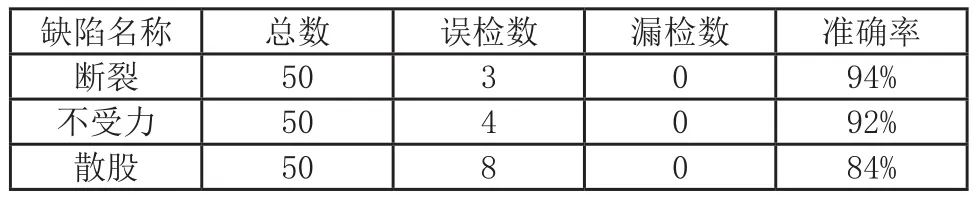
表1 吊弦缺陷檢測系統的檢測結果統計表
表中:準確率=檢測正確缺陷樣本/缺陷總樣本;
誤檢率=誤檢數/樣本總數;
漏檢率=漏檢數/樣本總數。
通過表中數據可知,算法對吊弦斷裂、吊弦不受力缺陷檢測準確率較高,同時誤檢率能夠得到很好的抑制,從而能夠節省計算資源,并為運維人員提供準確的維修參考數據;螺栓松脫缺陷檢測精度較高,誤檢率也得到了較好的抑制,能夠在實際工作中得到較好的應用;四種缺陷類型中散股的檢測精度最低,但也保證了80%以上的檢測精度,但是出現較高的誤檢率,從而需要人工或二次篩選,降低了工作效率,究其原因為:出現散股現象的圖像中,散股缺陷通常較小,只占據5~10個像素點,同時干擾因素較多,因此,優化散股檢測應成為接下來算法優化的重點。
4 結語
基于ASM(active shape model)算法對接觸網吊弦缺陷檢測,從吊弦的預處理和吊弦的缺陷檢測改進,實驗結果表明,該算法對吊弦多種缺陷類型能夠實現準確識別,識別準確率較高,對提升吊弦檢測水平提供重要支持,為后續工作提供寶貴意見。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
