開闊水域下換能器指向性實船校準方法研究
2021-09-09 01:44:30盛勇杰王月兵佟昊陽劉海楠
聲學技術 2021年4期
盛勇杰,王月兵,佟昊陽,趙 涵,劉海楠,沈 超
(1. 中國計量大學計量測試工程學院,浙江杭州 310018;2. 杭州應用聲學研究所,浙江杭州 311499)
0 引 言
近年來,隨著人們對海洋資源的重視度的提高,各個國家不斷加大對海洋的開發投入,水聲技術日益發展。受海洋科學研究、海洋資源開發、水聲對抗技術等領域的需求推動,水聲換能器的研究焦點集中在低頻寬帶、大功率、深水工作等方向[1]。指向性可以反映出換能器的發射響應或靈敏度隨發射或入射聲波方向的變化而變化的特性,是換能器的必測參數[2]。指向性圖是描述換能器指向性響應的重要特征參量[3]。在消聲水池中測量換能器指向性時,由于受到消聲水池尺寸及消聲材料吸聲系數的限制,難以對低頻換能器的指向性進行測量[4-5];而在開闊水域對低頻換能器指向性測量時,無法實現待測換能器及標準水聽器的剛性吊放及姿態控制;如使用近場測量法[6-7]則需要近場測量基陣,基陣的尺寸較大,需要專門的吊裝設備進行輔助控制,造價昂貴,效率不高,維護工作量較大,無法普及使用。
本文提出了一種基于超短基線定位和坐標轉換的換能器指向性實船校準方法,設計了三維立體水聽器陣列,利用各陣元接收聲波的相位差定位,利用姿態傳感器獲得待測換能器和水聽器陣列的姿態角參數,通過坐標轉換獲得同一坐標系下兩者的相對位置和姿態來實現定向,依據各陣元采集到的聲壓幅值繪制出待測換能器的指向性圖,并通過湖試與標準測量法結果的對比驗證了方法的可行性與有效性。
1 基本理論
1.1 標準測量法
根據《聲學水聲換能器測量:GB/T 7965—2002》,換能器指向性測量標準的實驗室測量法[8]如圖1所示。消聲水池側壁及水面貼附吸聲材料消除邊界聲波反射,待測換能器固定在旋轉軸上剛性吊放至水中,相隔已知距離放入標準水聽器,距離選擇應滿足遠場測量條件,旋轉待測換能器,記錄下旋轉的角度和標準水聽器測得的聲壓,將歸一化后的聲壓值作為極徑,旋轉角度作為極角即可繪制換能器極坐標下的指向性圖。

圖1 實驗水池測量指向性示意圖Fig.1 Schematic diagram of directivity measurement in the experimental pool
隨著換能器工作頻率的降低,為滿足測量的10倍遠場條件和避免反射波的疊加,所需要的實驗水池尺寸也隨之增大,現有的實驗水池尺寸很難滿足要求,無法對低頻換能器進行測量[9-10]。
1.2 基于超短基線定位的測量法
1.2.1 超短基線定位
超短基線定位是通過定位換能器發射高頻信號、測量其到達接收基陣陣元之間的相位差和測量目標到基陣中心的斜距來實現定位[11],其原理如圖2所示,由3只水聽器構成平面坐標系xOy,設定位聲源位于S處,聲源到1號水聽器陣元的距離R通過測量聲波在水下傳播的時間可以計算出來,它的方向余弦為

圖2 超短基線定位原理圖Fig.2 Principle diagram of USBL positioning

式中:α為聲源與1、2號水聽器陣元構成的x軸夾角;β為聲源與1、3號水聽器陣元構成的y軸夾角。
陣元間距為d,在遠場條件下進行測量,可以假定入射到所有基元的聲線平行,如圖3所示。

圖3 兩水聽器陣元間的相位差Fig.3 Phase difference between two hydrophone array elements
兩個水聽器陣元接收信號的相位差φ和信號入射角θm的關系為

式中:λ為聲信號波長。
可推出:

式中:12φ為1、2號水聽器陣元接收信號相位差;13φ為1、3號水聽器陣元接收信號相位差。
將式(4)、(5)代入式(1)、(2),可得:

進而得出:

1.2.2 超短基線定位精度改善
對定位式(6)進行誤差分析,在不考慮聲速和陣元間距誤差的情況下,位置誤差為

由式(9)可見,定位誤差與陣元間距成反比,增大陣元間距可減小定位誤差,但相位差的測量區間為[- π, π ],陣元間距與相位差的關系可為

即陣元間距應滿足d≤0 .5λ,否則會出現相位測量模糊的現象。為了在高定位精度下解決相位模糊的問題,改進了超短基線基陣,改進后的陣列如圖4所示。

圖4 改進后的超短基線定位基陣示意圖Fig.4 Schematic diagram of the improved USBL positioning array
陣列由三根兩兩正交的軸及十二個陣元構成,三根軸分別確定x、y、z三個方向的位置,每根軸上有四個陣元[12],最小陣元間距為d,d≤0 .5λ,最大陣元間距D最小陣元間距d的N倍,D=Nd。根據式(9),在相同的相位測量誤差條件下,定位誤差相比陣元間距為d時減小到1/N。


式中:14φ′為正時公式中取加號。
小間距陣元信號經處理后用于解決大間距引起的相位模糊問題,實現高精度的超短基線定位。
1.2.3 基于姿態傳感器的坐標轉換
姿態傳感器可以測出載體的姿態角,包括方位角、縱搖角和橫搖角,已知直角坐標系O-XYZ相對于直角坐標系O-X′Y′Z′的姿態角,就可由向量法求出繞各軸旋轉的旋轉矩陣[13]。本文所使用的坐標系均為東北天坐標系從坐標軸正向看原點,逆時針旋轉為正,順時針旋轉為負,旋轉順序由姿態傳感器確定為Z-X-Y[14-15]。繞X軸旋轉α角的旋轉矩陣RX(α)為

從坐標系O-XYZ(記為坐標系A)轉換到坐標系O-X′Y′Z′(記為坐標系A′)時,依次繞Z、X、Y軸旋轉γ、α、β角,旋轉矩陣的表達式為

本文提出的測量方法中,待測換能器與定位換能器柔性吊放于水中,水聽器陣列處和連接處各加裝一個姿態傳感器,分別測出兩處的姿態角α、β、γ和a、b、c,坐標轉換過程如圖5所示。

圖5 坐標轉換示意圖Fig.5 Coordinate conversion diagram
將水聽器陣列的中心作為原點,如圖5(a)中O-XYZ坐標系{A},在此坐標下將定位換能器視作點聲源,已知水聽器陣列任一陣元P點的坐標,通過超短基線定位得到定位換能器OHf的坐標。
通過水聽器陣列的姿態角旋轉把水聽器陣列當前坐標系O-XYZ轉換到以陣列交叉點為原點的大地坐標系O-X′Y′Z′{A′}(見圖5(a)),旋轉矩陣如式(15)所示。
由式(15)可得,定位換能器在坐標系O-X′Y′Z′{A′}下的位置A′OHf:



圖6 換能器坐標系下單個水聽器陣元位置Fig.6 The position of a single hydrophone array element in the transducer coordinate system
2 試驗方案
本文采用一圓柱形換能器作為待測聲源,在某試驗場進行了湖試試驗,分別使用標準測量法和本文的方法對其指向性進行了測量,并對兩個測量結果進行分析比較。
2.1 標準測量法試驗
在湖上用標準測量法測量待測換能器的指向性,測量系統示意圖如圖7所示。

圖7 標準測量法示意圖Fig.7 Schematic diagram of standard measurement method
試驗時,通過金屬連接桿將待測換能器和水聽器剛性吊放至水下15 m位置,兩者相距10 m,低頻信號是發射頻率分別為5 kHz和2.5 kHz的正弦脈沖信號,周期個數均為10個,轉動盤轉動步進為2°,信號源發射信號經功率放大器放大后激勵待測換能器工作,水聽器接收信號通過NI-PXI4462采集卡采集,同時采集卡采集信號源的監聽信號。將采集所得數據進行離線處理,繪制出換能器的指向性圖,并作為本文方法的標準值依據。
2.2 開闊水域下實船校準試驗
本文搭建了開闊水域實船校準換能器指向性的試驗平臺,由母船聲發射系統和子船聲接收系統兩部分構成。聲發射系統包括了放置硬件電路的密閉電子倉、高頻換能器、溫深傳感器以及姿態傳感器;聲接收系統包括了放置硬件電路的密閉電子倉、三維立體陣列、溫深傳感器以及姿態傳感器。其中高頻換能器和三維立體陣列主要用于超短基線定位,溫深傳感器用于排除環境干擾,姿態傳感器用于坐標轉換。
在實船校準過程中,實驗母船錨定,待測換能器連同聲發射系統柔性吊放至水下,聲接收系統柔性吊放于水下,子船搭載聲接收系統繞實驗母船緩慢航行多次。聲發射系統與聲接收系統通過衛星對時實現同步,如圖8所示。

圖8 實船校準法示意圖Fig.8 Schematic diagram of ship-board calibration method
航行期間,發射端在整秒時間點處觸發,先后發射10個整周期的13.5 kHz的高頻正弦信號和10個整周期的低頻正弦信號,低頻信號是頻率分別為5 kHz和2.5 kHz的正弦脈沖信號,之后經過功率放大器放大后分別激勵定位換能器和待測換能器工作,同時實時采集姿態信息;接收端對三維立體陣列的 12 只水聽器的聲波信號及姿態信息進行同步實時采集,發射端與接收端通過GPS實現同步。收發信號示意圖如圖9所示。

圖9 收發信號示意圖Fig.9 Schematic diagram of sending and receiving signals
3 試驗結果分析
對單一陣元原始信號的特征值提取過程如圖10所示。首先將原始信號(圖10(a))通過帶通濾波器進行濾波,得到濾波后信號(圖10(b));然后與標準波形(圖 10(c))進行互相關運算得到互相關系數(圖10(d)),其表征著兩個信號的相似程度;根據互相關函數(圖 10(d))截取出所需的高頻及低頻信號(圖10(e))。通過傅里葉變換可提取每個陣元的高頻信號(13.5 kHz)的相位信息與低頻信號(待測聲源驅動信號)的幅值信息。

圖10 接收信號相關處理過程Fig.10 Correlation processing and extraction process of received signals
對提取出的特征值數據集進行處理,利用本文所述方法,對12路水聽器的高頻信號處理后,基于超短基線定位得到待測換能器與定位換能器的相對位置;然后通過姿態傳感器測得的姿態角進行坐標轉換后得到水聽器與待測換能器的相對位置,選取出俯仰角在5°以內的數據;最后通過處理選取出來的低頻信號得到其指向性數據,并繪制指向性圖。實船校準法和標準測量法對比結果如圖11和圖12所示。

圖11 兩種方法測量5 kHz換能器指向性的結果對比Fig.11 Comparison of the directivity diagram of 5 kHz transducer measured by the two methods
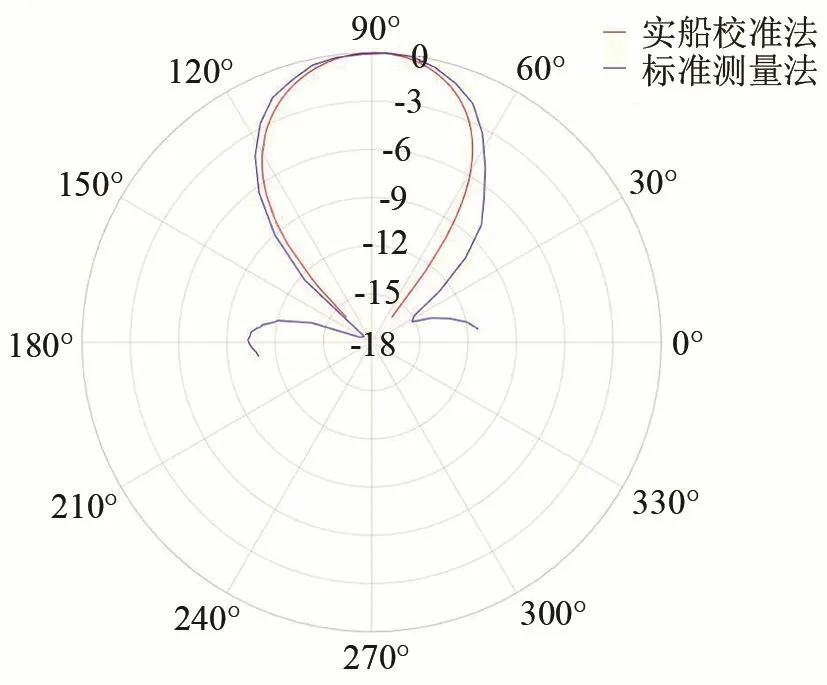
圖12 兩種方法測量2.5 kHz換能器指向性的結果對比Fig.12 Comparison of the directivity diagram of 2.5 kHz transducer measured by the two methods
由測量結果可以得知,頻率為5 kHz時標準測量法和實船校準法測得-3 dB波束寬度分別為24°和25°,測量誤差為4.2%;頻率為2.5 kHz時標準測量法和實船校準法測得-3 dB波束寬度分別為54°和50°,測量誤差為7.4%,誤差均在10%以內,符合國家標準《聲學水聲換能器測量:GB/T 7965—2002》中500 Hz~500 kHz的換能器波束寬度測量誤差小于10%的要求。因此,認為該測量方法是可行的,可以用于低頻換能器的指向性測量。
由圖11發現,在90°~95°時指向性存在較大偏差,分析后可知,由于繞船航行次數過少,該部分數據缺少,導致其指向性圖中偏差較大,可通過增加航行次數來解決此問題。
對試驗誤差進行分析,造成誤差的主要原因有兩個方面:
(1) 航行測量時作為測量子船的摩托艇的發動機產生的噪聲,雖然經過濾波處理,但仍對信號的提取有一定影響。
(2) 使用的姿態傳感器在角度距離變化時會有一定的遲滯反應,雖然在測量時盡量控制測量子船緩慢平穩航行,但在折返時姿態角的提取會有一定誤差[16]。
4 結 論
隨著換能器工作頻率的降低,實驗室消聲水池難以滿足其指向性的測量條件,本測量方法提出利用超短基線定位和坐標轉換原理,在開闊水域下對大尺寸低頻換能器的指向性進行測量。與消聲水池中的測量結果相比,測量誤差滿足國標要求,并且實現了實船檢測。在測量艦載聲吶這類不易拆卸,需要實船檢測的低頻換能器方面有很好的應用前景。
本文提出的測量方法僅在湖上驗證了可行性,在海洋或者深水環境下測量時,需考慮水深、水溫對聲速的影響。同時,應對更低頻率的換能器進行試驗驗證。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
