下行帶式輸送機盤式制動系統控制策略的研究
2021-09-08 07:28:48張瑞清
機械管理開發 2021年7期
張瑞清
(山西寧武大運華盛南溝煤業有限公司,山西 寧武 036700)
引言
20 世紀80 年代末,我國首次在傾斜煤層上使用了向下帶式輸送機。隨著我國科學技術的發展和傾斜煤層產量的增加,煤礦對長距離、大容量、大傾角下行帶式輸送機的需求越來越大。使用該輸送機可以大大減少礦山工作量,減少基設投資,縮短建設周期,產生了顯著的社會經濟效益[1-3]。帶式輸送機下行傳動方案原理如圖1 所示。
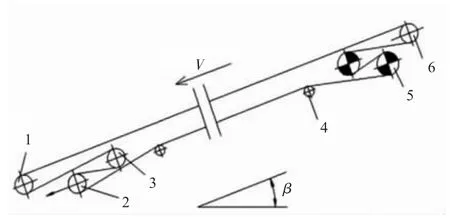
圖1 帶式輸送機下行傳動方案原理圖
目前,國內使用的下行帶式輸送機制動系統主要由液壓、液壓動力和盤式制動系統組成。此類盤式制動系統因其單級制動、結構簡單、技術成熟、成本低等突出優點而得到廣泛應用[4-6]。其中,盤式制動系統的控制是保證盤式制動系統運行可靠性的關鍵技術,但該控制技術存在的不足也亟待解決。
1 制動速度曲線
由于輸送帶是黏彈性體,在制動過程中應避免應力的波動,以減少對輸送帶、滾筒、托輥和機架的動載荷。下行帶式輸送機的理想制動過程應具有以下特點:避免剎車時間過長,剎車減速小于規定減速;最大制動減速盡可能小;避免制動減速時突然變化。
目前常用的制動速度曲線如圖2 所示。可以看出,在直線曲線的起始點和終點處,減速的導數趨于無窮。諾德爾曲線在T/2 點減速突然變化,減速導數不連續。哈里森曲線是連續的,沒有突然減速的變化。輸送機內的張力受到減速突然變化的影響,縮短了其使用壽命,不利于制動控制。因此,我們采用哈里森曲線來分析下向帶式輸送機的制動過程。
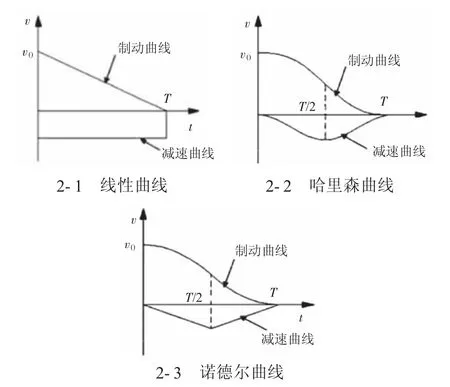
圖2 制動速度和減速曲線
2 盤式制動裝置
如下頁圖3 所示,盤式制動裝置由盤式制動器、制動盤和車架組成。盤式制動裝置采用正常的閉式液壓控制,即在沒有油壓時,盤式彈簧將制動片壓在制動盤上,產生最大的制動力矩。通過調節電液閥的輸入電壓(或電流)比例,輸出油壓p 可連續調節制動力矩。這樣就可以靈活地控制下行帶式輸送機的制動速度。
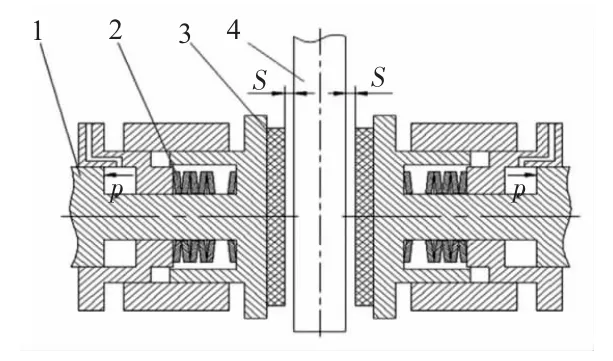
圖3 盤式制動裝置結構
3 盤式制動系統控制
3.1 閉環速度控制
本文所研究的盤式制動系統為速度閉環控制系統。在該系統中,比例電液閥是核心元件;這種閥門的質量對系統的性能有重要的影響。通過改變電液閥的輸入電壓(或電流)比例,可調節輸出油壓和制動力矩,以控制下行帶式輸送機的制動速度。利用階躍函數作為輸入信號,可以通過MATLAB 仿真系統的動態性能。閉環控制的速度曲線如圖4 所示。結果表明,采用閉環速度控制時,系統響應速度過慢,穩態誤差過大。因此,必須采取措施來糾正控制系統。
3.2 傳統PID 控制
為了使盤式制動控制系統具有更理想的動態性能,首先需要設計并安裝PID(比例積分微分)控制器對系統進行校正。在PID 控制器的應用中,其參數的調整是非常重要的。由于Ziegler-Nichols 方法操作簡單,效果顯著,因此本文采用Ziegler-Nichols 方法來調整PID 參數。調整結果顯示,比例系數kp=208.044,積分系數ki=889.077,微分系數為kd=12.191。采用階躍函數作為輸入信號,常規PID 控制的速度曲線如圖4 所示。可以看出,傳統PID 控制具有響應快、穩態誤差小的特點,超調量增加了24%。而超調量的增大會引起制動速度的波動,從而對輸送帶產生影響,不能滿足下向帶式輸送機柔性控制的要求。因此,為了減少超調,減小對制動系統的影響,必須對PID 控制器的參數進行進一步優化。
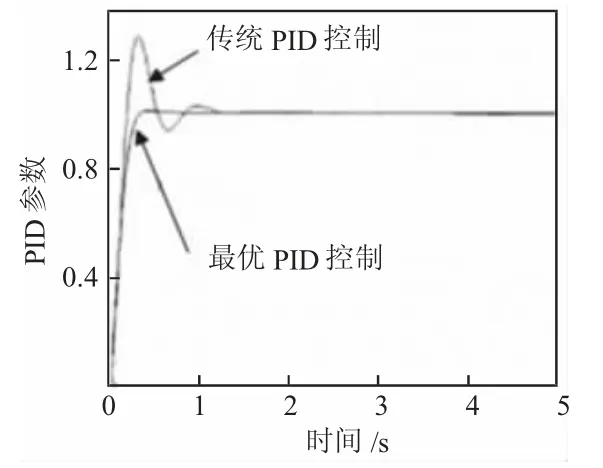
圖4 控制系統階躍響應
3.3 最優PID 控制
PID 控制系統主要有兩種參數優化技術,一種是多變量優化技術,一種是隨機優化技術。這兩種優化技術都基于復雜的計算,需要復雜的編程。利用MATLAB 中的信號約束模塊對PID 參數進行優化。該方法具有較好的優化效果。
通過信號約束調整PID 參數,使其與kp、ki、kd的初始范圍相關聯。經過反復試驗,通過“調諧參數窗口”確定其范圍,其中kp/5≤kp≤5kp;ki/20≤ki≤5ki;kd/5≤kd≤5kd,優化后的初始值(kp=208.044,ki=889.077,kd=12.191)采用Ziegler-Nichols 方法調整PID 參數,并進入MATLAB 命令窗口。在本文的模擬中,步長是可變的,時間是5 s。模擬的最佳結果是kp=207.805,ki=44.454,kd=19.423。最優PID 控制的速度曲線如圖4 所示。可以看出,最優PID 控制的超調量和調節時間明顯減少,超調量由24%降低到4%。減小超調量可以使輸出速度快速同步預設速度,同時減少輸送帶在制動過程中的波動和沖擊。通過MATLAB 仿真得到下行帶式輸送機的速度曲線如圖5 所示,初始帶速v0=2 m/s,制動時間t=20 s。圖中預置曲線為哈里森曲線,仿真曲線為最優PID 控制的速度曲線。可以看出,模擬曲線與預設曲線之間存在一定的滯后,但滯后相當小。一般情況下,輸出速度能正確跟隨預設速度;該控制方法可實現對下移帶式輸送機的柔性控制。
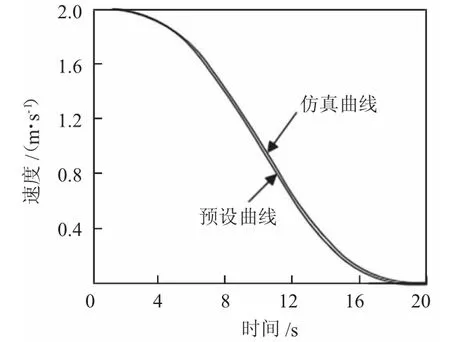
圖5 最優PID 控制速度曲線
4 實驗
為了驗證最優PID的仿真和控制策略,本文開發了一個多功能試驗臺(如下頁圖6 所示)來模擬盤式制動系統的制動過程。本文只模擬了過載條件下的制動過程,這是最容易發生事故和嚴重的情況。在實驗中,利用液壓絞車模擬了下行帶式輸送機的過載。模擬實驗時間設置為40 s。該系統采用不加修正的閉環速度控制。得到的實驗速度曲線如下頁圖7-1 所示。雖然實測速度曲線與哈里森曲線相似,但與預設速度曲線存在較大的滯后,波動較大。由于系統僅由閉環速度控制而不進行校正,無法獲得良好的制動控制性能。下頁圖7-2 為常規PID 控制的速度曲線,其中被測速度較好地同步預設速度;與閉環控制相比,響應速度快,波動小。圖7-3 為最優PID控制的速度曲線,測得的速度正確地同步預設速度,波動較小。這滿足了盤式制動系統的柔性控制要求。

圖6 實驗設備
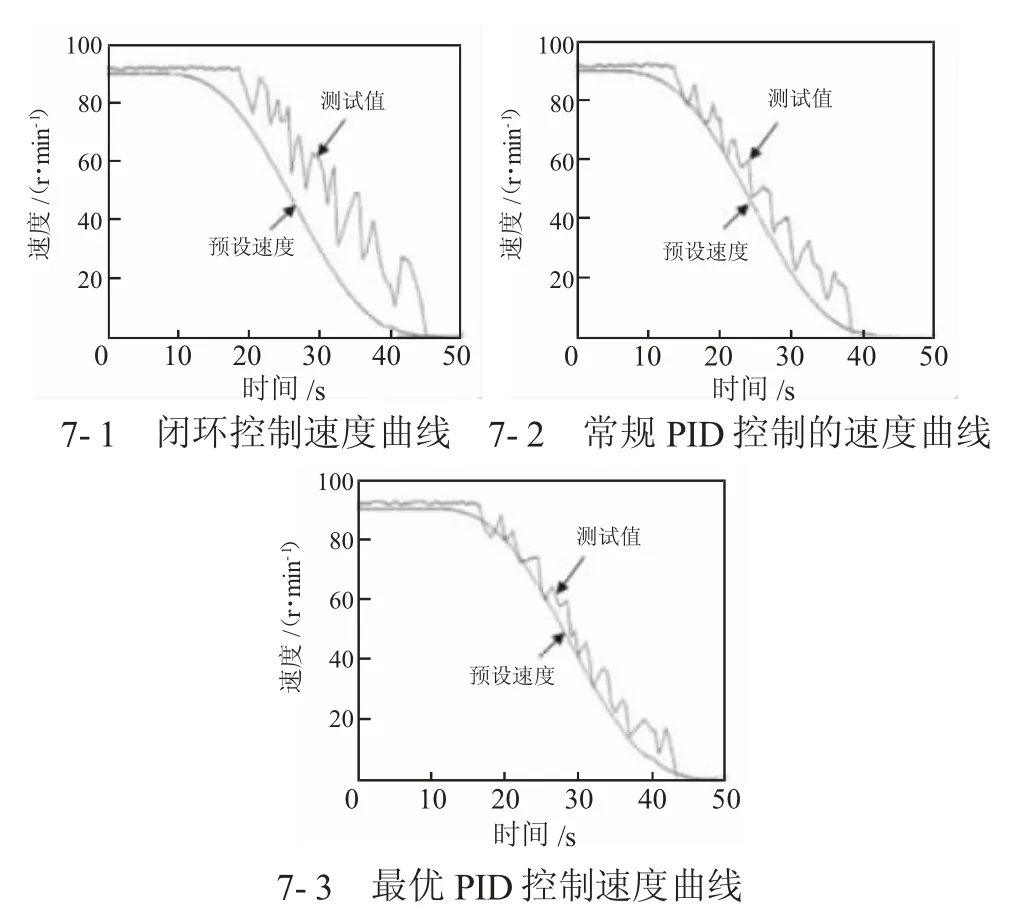
圖7 三種控制方法的速度曲線
5 結論
1)針對盤式制動系統的速度閉環控制特點,利用MATLAB 對傳統PID 控制和最優PID 控制進行了仿真。通過分析比較,建立了盤式制動系統最優PID的控制策略。
2)實驗結果表明,最優PID 控制能夠使被測速度正確地與預設速度同步,滿足下行帶式輸送機的柔性控制要求。實驗結果也證明了理論分析的正確性和控制策略的有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
