懸停系統(tǒng)運(yùn)行品質(zhì)對(duì)潛艇懸停操縱的影響
2021-09-07 02:12:12楊國棟彭立程
造船技術(shù) 2021年4期
胡 坤, 何 斌, 楊國棟, 彭立程
(海軍潛艇學(xué)院,山東 青島 266199)
0 引 言
現(xiàn)代潛艇懸停的完整概念是以最低的噪聲、最低的能量消耗和最簡便的操作,在任何海區(qū)條件下,使?jié)撏О磻?zhàn)術(shù)要求偏差懸停在指令深度上,或按規(guī)定的方式過渡至新的指令深度上懸停。水下懸停與潛坐海底、潛坐液體海底和水下錨泊并稱為潛艇水下停泊方式之一[1]。潛艇水下懸停可消除螺旋槳噪聲和水動(dòng)力噪聲、降低機(jī)械振動(dòng)噪聲、提高聲吶作用距離、節(jié)省能源,對(duì)提高潛艇的戰(zhàn)斗力具有重大的現(xiàn)實(shí)意義和戰(zhàn)術(shù)價(jià)值。
潛艇的水下懸停由專門的懸停系統(tǒng)控制實(shí)現(xiàn)[2],懸停系統(tǒng)運(yùn)行品質(zhì)(包括流量計(jì)誤差、注排水速率、最小注排水量等)的高低對(duì)潛艇懸停的戰(zhàn)術(shù)使用具有直接影響。分析懸停的戰(zhàn)術(shù)運(yùn)用對(duì)懸停系統(tǒng)性能的需求,以模型潛艇為研究對(duì)象,在潛艇懸停運(yùn)動(dòng)數(shù)學(xué)模型的基礎(chǔ)上進(jìn)行仿真計(jì)算,研究懸停系統(tǒng)的運(yùn)行品質(zhì)對(duì)潛艇懸停操縱的影響,在仿真結(jié)果的基礎(chǔ)上分析懸停系統(tǒng)的運(yùn)行品質(zhì)與懸停穩(wěn)定性之間的邏輯關(guān)系,為優(yōu)化潛艇懸停系統(tǒng)的操控性能提供理論依據(jù)。
1 懸停系統(tǒng)的組成及工作原理
1.1 懸停系統(tǒng)組成
潛艇懸停系統(tǒng)一般由專用懸停水艙(無懸停水艙的潛艇可用浮力調(diào)整水艙代替)和懸停控制系統(tǒng)組成。
專用懸停水艙是存儲(chǔ)用來調(diào)節(jié)潛艇浮力平衡水的艙室,其容積約為潛艇水下排水量的0.6%~0.8%。懸停水艙耐壓,其縱向位置在潛艇的水下容積中心附近,垂向位置靠近艙底。
懸停控制系統(tǒng)由氣壓平衡系統(tǒng)、懸停排注水系統(tǒng)和懸停控制裝置組成。氣壓平衡系統(tǒng)是使懸停水艙的氣壓與舷外海水壓力保持一定差值的空氣壓力平衡系統(tǒng);懸停排注水系統(tǒng)是利用專用水泵或懸停水艙與舷外海水壓力差對(duì)懸停水艙水量進(jìn)行控制的海水系統(tǒng);懸停控制裝置由深度傳感器、流量計(jì)、壓力計(jì)、調(diào)節(jié)閥等硬件設(shè)備和控制算法及處理軟件等組成。
1.2 懸停系統(tǒng)工作原理
當(dāng)設(shè)置懸停深度后,自動(dòng)氣壓平衡系統(tǒng)自動(dòng)開、關(guān)充氣閥和放氣閥,控制懸停水艙內(nèi)的初始?jí)毫Φ扔诨蛐∮谙贤鈮毫Γ谏疃葌鞲衅鹘邮諠撏?shí)際深度后,與指令深度進(jìn)行比較,若出現(xiàn)偏差,則控制系統(tǒng)按確定的控制規(guī)律進(jìn)行運(yùn)算,并按規(guī)定程序輸出控制指令,啟動(dòng)懸停水艙排注水機(jī)構(gòu)進(jìn)行排注水,與此同時(shí)流量計(jì)量儀或水艙水量計(jì)量儀將當(dāng)前存水量反饋至控制系統(tǒng),參與控制規(guī)律運(yùn)算,當(dāng)實(shí)際深度達(dá)到指令深度后系統(tǒng)處于平衡狀態(tài)。
2 懸停戰(zhàn)術(shù)運(yùn)用對(duì)懸停系統(tǒng)性能需求
潛艇水下懸停的戰(zhàn)術(shù)要求是能夠長時(shí)間在任何海區(qū)內(nèi)、在任何海洋環(huán)境條件下懸停在任何指令深度上,而且成功率須接近100%。懸停的戰(zhàn)術(shù)運(yùn)用對(duì)懸停系統(tǒng)的需求包括:
(1)能夠在各種不同的海洋環(huán)境條件下進(jìn)行懸停。當(dāng)某海區(qū)的海水密度隨下潛深度變化呈正梯度時(shí),或在海區(qū)某深度上出現(xiàn)海水密度為正梯度層時(shí),潛艇航速降為零且均衡良好后,可停在某深度上,不上浮也不下潛,這種操縱方式稱為沉液體海底,并不是現(xiàn)代意義上的懸停。現(xiàn)代潛艇應(yīng)根據(jù)戰(zhàn)術(shù)和提高聲吶作用距離的需要,按照規(guī)定的偏差懸停在指令深度上,懸停海區(qū)的海水密度梯度可能為正、可能為負(fù),也可能為均勻?qū)樱翼毧紤]外界干擾對(duì)潛艇的影響。
(2)能夠使?jié)撏У脑肼曔_(dá)到最低。安靜性和隱蔽性是現(xiàn)代潛艇的主要戰(zhàn)術(shù)和技術(shù)指標(biāo),因此懸停必須最大限度地降低噪聲。注排水、充放氣產(chǎn)生的噪聲是懸停時(shí)的主要噪聲源。如果不能降低懸停系統(tǒng)執(zhí)行機(jī)構(gòu)的振動(dòng)和空氣噪聲,不能降低其流體的沖擊和摩擦噪聲,就失去懸停的戰(zhàn)術(shù)意義。因此,懸停系統(tǒng)采用的注排水速率也應(yīng)控制在一定范圍之內(nèi)。過低的注排水速率可能導(dǎo)致控制不住潛艇,而注排水速率過高則增加水泵噪聲。另外,在不影響懸停精度的前提條件下,單位時(shí)間內(nèi)的注排水次數(shù)也應(yīng)越少越好。
(3)能夠按戰(zhàn)術(shù)要求懸停在指令深度上。現(xiàn)代懸停戰(zhàn)術(shù)要求潛艇必須按規(guī)定的穩(wěn)定精度懸停在指令深度上,或按規(guī)定的指標(biāo)改變至新的指令深度上懸停。對(duì)懸停控制系統(tǒng)來說,過低的控制精度對(duì)潛艇水下懸停沒有意義,過高的控制精度沒有必要且會(huì)增加單位時(shí)間內(nèi)的注排水次數(shù),不利于潛艇的隱蔽。
(4)能夠使?jié)撏У哪芰肯倪_(dá)到最低。如果不能降低懸停系統(tǒng)執(zhí)行機(jī)構(gòu)的能量消耗,在潛艇上安裝懸停系統(tǒng)也失去了一半意義。因此,懸停系統(tǒng)水泵的功率不應(yīng)過大,單位時(shí)間內(nèi)的注排水次數(shù)也應(yīng)降至最低。
(5)操作簡單。目前懸停操縱的相對(duì)復(fù)雜性對(duì)艇員素質(zhì)要求較高,潛艇懸停系統(tǒng)要求經(jīng)過簡單訓(xùn)練后艇員就能熟練地完成操作。
3 懸停操縱運(yùn)動(dòng)控制數(shù)學(xué)模型
3.1 懸停運(yùn)動(dòng)基本數(shù)學(xué)模型
潛艇在水下懸停時(shí),先降至經(jīng)航工況,經(jīng)準(zhǔn)確均衡后再停下。根據(jù)潛艇垂直面運(yùn)動(dòng)規(guī)律,水下懸停類似于潛艇在垂直面的慣性潛浮運(yùn)動(dòng),因此,對(duì)潛艇垂直面操縱運(yùn)動(dòng)非線性方程[3-4]進(jìn)行合理簡化,則潛艇水下懸停運(yùn)動(dòng)的基本數(shù)學(xué)模型為
(1)

3.2 海洋環(huán)境干擾力模型
海洋環(huán)境對(duì)潛艇懸停的影響非常復(fù)雜,為方便研究,有必要對(duì)干擾力模型進(jìn)行一定的簡化。由于海水溫度、鹽度對(duì)潛艇懸停的影響通過海水密度的變化反映出來,同時(shí)海水壓力對(duì)潛艇懸停的影響通過艇體壓縮反映出來[5],因此將干擾力模型統(tǒng)一為海水密度變化模型和艇體壓縮模型。
(1)海水密度變化模型
各種深度下海水密度變化產(chǎn)生的力P3為
P3=-V(ρ0-ρ)
(2)
式中:V為潛艇水下全排水量;ρ0為潛艇初始深度下的海水密度;ρ為潛艇當(dāng)前深度下的海水密度。
在均勻?qū)忧闆r下取海水密度為定值,即認(rèn)為海水密度不變化。
在正梯度情況下密度變化為
(3)
式中:ρ(ζ)為當(dāng)前深度下的海水密度;ζ為當(dāng)前深度;ζ0為初始深度。
在負(fù)梯度情況下密度變化為
ρ(ζ)=1.025-0.000 01(ζ-ζ0)
(4)
(2)艇體壓縮模型
艇體壓縮量隨深度增加而變化,艇體壓縮產(chǎn)生的力P4為
P4=0.029(ζ-ζ0)
(5)
3.3 懸停水艙注排水控制模型
潛艇懸停時(shí)所用到的控制執(zhí)行機(jī)構(gòu)主要是懸停專用水艙。懸停水艙實(shí)際容積Q為考慮相應(yīng)控制規(guī)律、懸停水艙初始注水量Q0和最大可能的注排水量Qmax后的水艙狀態(tài)方程的積分結(jié)果。
懸停專用水艙狀態(tài)方程為
(6)

(7)
式中:Q1max為最大注排水速率。

(8)
3.4 懸停水艙閥門開啟模型
在初始狀態(tài)下水艙閥門全關(guān),閥門開啟系數(shù)Ko=0,在接收到注排水或調(diào)水控制信號(hào)后閥門在響應(yīng)時(shí)間內(nèi)按線性過程由全關(guān)變化至全開。當(dāng)正在進(jìn)行注排水時(shí),水艙閥門全開,此時(shí)閥門開啟系數(shù)Ko=1,在接收到停止注排水或調(diào)水控制信號(hào)后閥門在響應(yīng)時(shí)間內(nèi)按線性過程由全開變化至全關(guān)。
3.5 模型有效性分析
為驗(yàn)證懸停操縱運(yùn)動(dòng)控制數(shù)學(xué)模型的有效性,對(duì)負(fù)梯度條件下的潛艇懸停進(jìn)行仿真,仿真條件盡可能與模型潛艇操縱試驗(yàn)時(shí)的海洋環(huán)境接近。具體仿真環(huán)境:海水密度梯度類型為弱負(fù)梯度,梯度值為-0.000 015,懸停穩(wěn)定深度為40.0 m,初始不均衡量為0.5 t,懸停水艙注排水速率為10.0 L/s。數(shù)學(xué)模型有效性對(duì)比如表1所示。
由表1可知:在相似海洋環(huán)境條件下,懸停仿真值與試驗(yàn)值非常接近,特別是單位時(shí)間的注排水次數(shù)幾乎相等。單位時(shí)間注排水量的誤差也不到3%。可以得出結(jié)論:采用的潛艇懸停運(yùn)動(dòng)數(shù)學(xué)模型能夠較真實(shí)地反映潛艇的實(shí)際懸停操縱過程,從而驗(yàn)證潛艇懸停運(yùn)動(dòng)數(shù)學(xué)模型的有效性。

表1 數(shù)學(xué)模型有效性比對(duì)
4 懸停系統(tǒng)運(yùn)行品質(zhì)對(duì)水下懸停的影響
懸停系統(tǒng)的運(yùn)行品質(zhì)對(duì)潛艇能否按照戰(zhàn)術(shù)需求進(jìn)行精準(zhǔn)的懸停操縱具有關(guān)鍵作用。其中,尤為關(guān)鍵的3個(gè)核心控制參數(shù)是流量計(jì)誤差、懸停水艙注排水速率和最小注排水量。
海水比重垂直面的變化梯度通常有3種典型形式:(1)海水密度隨深度增加而增大,即密度呈正梯度變化;(2)海水密度不隨深度變化,即密度均勻?qū)樱?3)海水密度隨深度的增加而減小,即密度呈負(fù)梯度變化。在這3種典型形式中,負(fù)梯度類型對(duì)懸停系統(tǒng)的要求較為苛刻,潛艇如果能在負(fù)梯度類型的海水中懸停,那么在均勻?qū)雍驼荻阮愋偷暮K幸粯幽軌驕?zhǔn)確懸停。所有仿真均在對(duì)懸停系統(tǒng)性能要求較為苛刻的負(fù)梯度類型條件下進(jìn)行。
基于懸停運(yùn)動(dòng)基本數(shù)學(xué)模型、干擾力模型和懸停水艙注排水控制模型,以模型潛艇為研究對(duì)象,采用C#語言編寫潛艇水下懸停操縱運(yùn)動(dòng)仿真軟件[6-7],通過懸停仿真進(jìn)一步分析流量計(jì)誤差、懸停水艙注排水速率和最小注排水量對(duì)潛艇懸停操縱的影響。
4.1 流量計(jì)誤差對(duì)懸停的影響
懸停水艙的流量計(jì)誤差大小對(duì)潛艇水下懸停非常關(guān)鍵。潛艇在水下懸停時(shí),航速為零,垂向運(yùn)動(dòng)速度也較小,潛艇的慣性又非常大,因此難以實(shí)時(shí)檢測垂向作用力,也難以實(shí)時(shí)檢測加速度,流量計(jì)存在誤差會(huì)造成艇輕或艇重及系統(tǒng)振蕩,因此控制流量計(jì)誤差具有重要意義。在理想情況下,流量計(jì)誤差應(yīng)為零,但在現(xiàn)實(shí)條件下,流量計(jì)存在誤差無法避免,需要通過懸停仿真分析流量計(jì)誤差對(duì)懸停操縱的影響。
圖1~圖3分別為流量計(jì)誤差為0 L/s、-0.2 L/s、+0.5 L/s時(shí)的懸停仿真曲線,+表示多注(排),-表示少注(排)。仿真條件設(shè)置:海水密度梯度類型為負(fù)梯度(梯度值為-10-6),懸停水艙注排水速率為10.0 L/s,初始不均衡量為0.5 t,懸停水艙閥門延遲時(shí)間為6.0 s,目標(biāo)懸停深度為100.0 m。
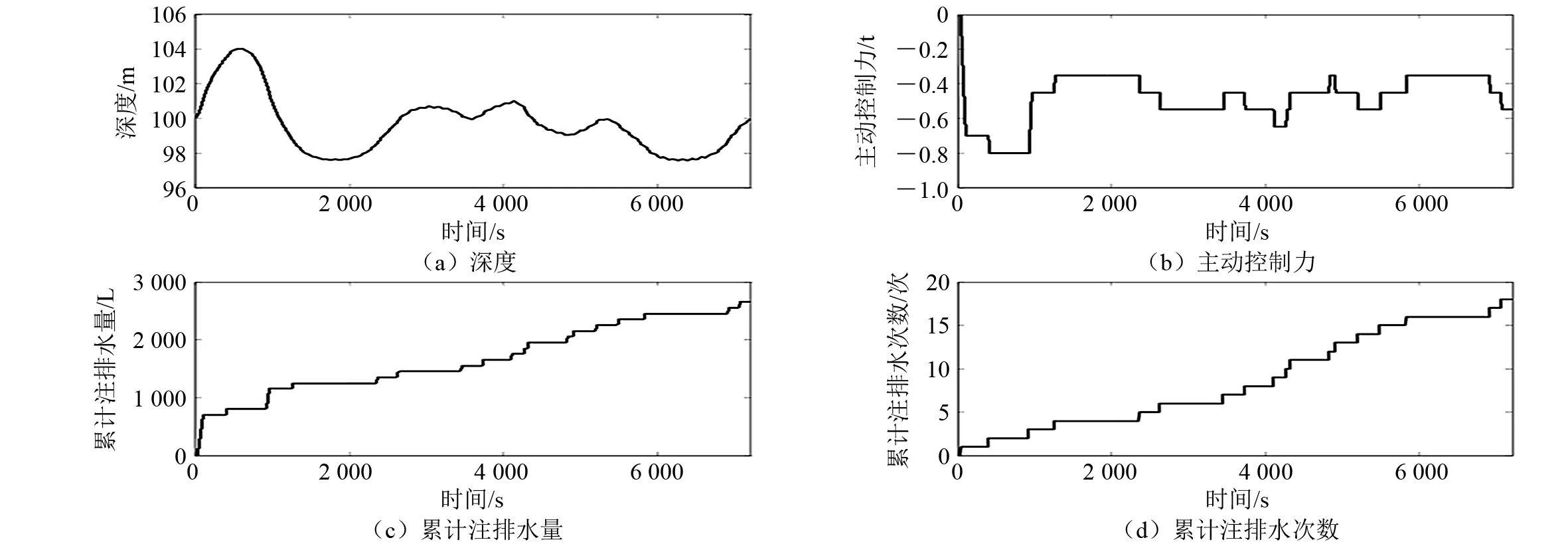
圖1 無流量計(jì)誤差時(shí)的懸停仿真曲線
圖2 流量計(jì)誤差為-0.2 L/s時(shí)的懸停仿真曲線
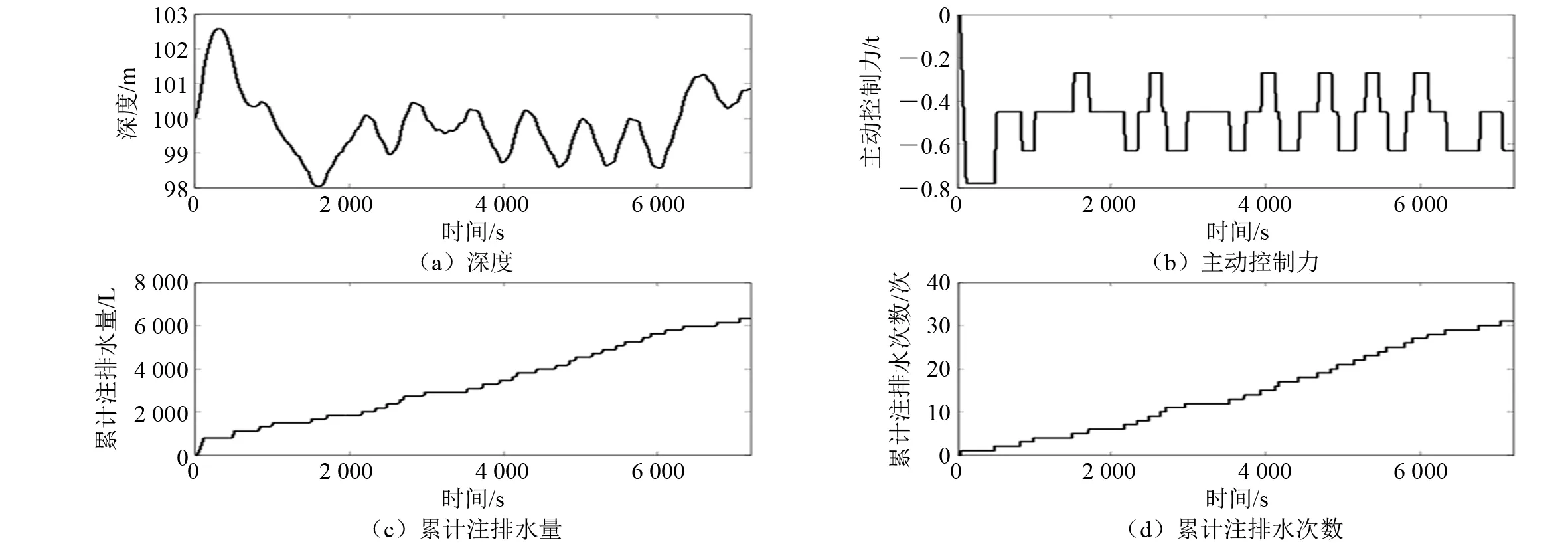
圖3 流量計(jì)誤差為+0.5 L/s時(shí)的懸停仿真曲線
表2為流量計(jì)誤差為0 L/s、±0.2 L/s、±0.5 L/s時(shí)的懸停仿真數(shù)據(jù)。需要特別注意的是,表2中最后3項(xiàng)數(shù)據(jù)為平均注排水量、平均注排水時(shí)間和平均注排水次數(shù),而在仿真圖中為累計(jì)注排水量和累計(jì)注排水時(shí)間,二者有區(qū)別。表2中的挽回深度定義為當(dāng)潛艇存在初始不均衡量時(shí),經(jīng)過一次注或排水,潛艇偏離初始深度的最大值。
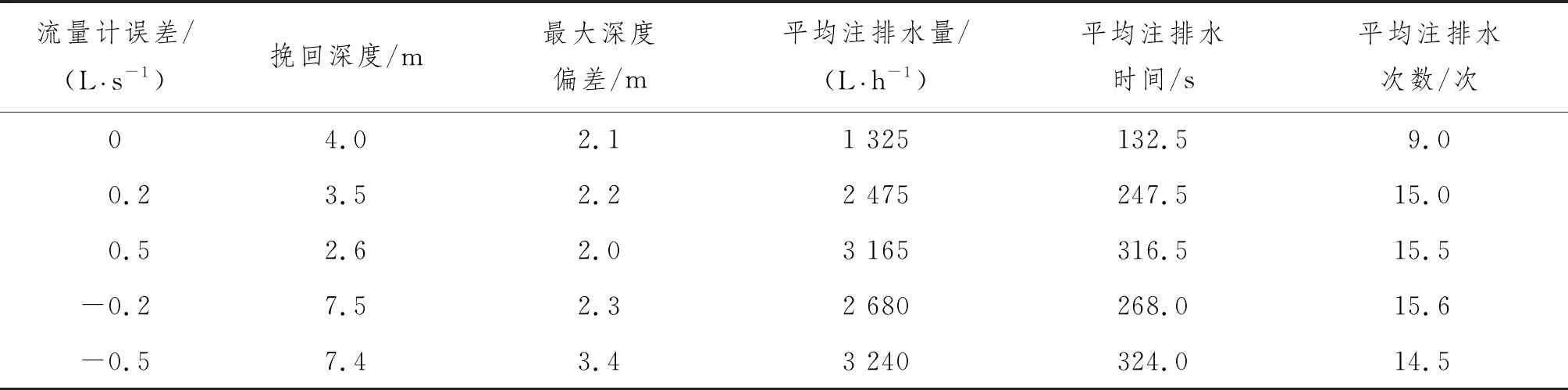
表2 流量計(jì)誤差對(duì)潛艇懸停的影響
由仿真數(shù)據(jù)可看出:當(dāng)流量計(jì)不存在誤差時(shí),單位時(shí)間內(nèi)平均注排水量、平均注排水時(shí)間和平均注排水次數(shù)分別為1 325 L、132.5 s和9次;當(dāng)流量計(jì)誤差增至0.5 L/s時(shí),單位時(shí)間內(nèi)平均注排水量、平均注排水時(shí)間和平均注排水次數(shù)均有不同程度的增加,分別為3 165 L、316.5 s和15.5次;當(dāng)流量計(jì)存在負(fù)誤差(實(shí)際注排水量小于流量計(jì)顯示注排水量)時(shí),潛艇挽回深度有明顯增加;當(dāng)流量計(jì)存在正誤差(實(shí)際注排水量大于流量計(jì)顯示注排水量)時(shí),潛艇挽回深度變化不大,甚至比流量計(jì)無誤差時(shí)還有少許減小,并且流量計(jì)存在負(fù)誤差時(shí)較存在正誤差時(shí)更難控制。
當(dāng)存在流量計(jì)誤差時(shí),單位時(shí)間內(nèi)平均注排水次數(shù)明顯比不存在流量計(jì)誤差時(shí)多,隨著流量計(jì)誤差的增大,單位時(shí)間內(nèi)平均注排水次數(shù)也變大;當(dāng)流量計(jì)誤差為負(fù)時(shí),初始挽回不能遵循流量計(jì)誤差為正時(shí)的操縱規(guī)律,依據(jù)操縱的效果適時(shí)增大注排水量。
4.2 注排水速率對(duì)懸停的影響
懸停水艙的不同注排水速率對(duì)潛艇懸停操縱有較大的影響,通過懸停仿真分析懸停水艙注排水速率對(duì)懸停操縱的影響。
圖4~圖6分別為懸停水艙注排水速率為6.0 L/s、10.0 L/s、20.0 L/s時(shí)的懸停仿真曲線。仿真條件設(shè)置:海水密度梯度類型為負(fù)梯度(梯度值為-10-6),目標(biāo)懸停深度為100.0 m,懸停水艙閥門延遲時(shí)間為6.0 s,初始不均衡量為0.5 t。
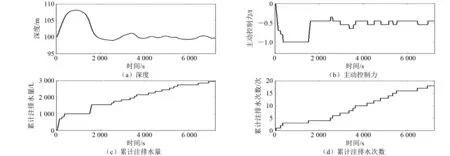
圖4 注排水速率為6.0 L/s時(shí)的懸停仿真曲線
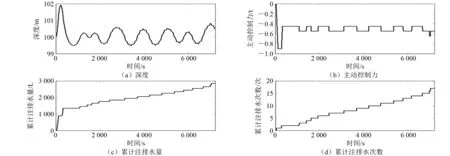
圖5 注排水速率為10.0 L/s時(shí)的懸停仿真曲線
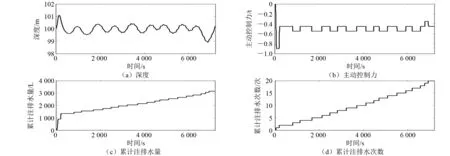
圖6 注排水速率為20.0 L/s時(shí)的懸停仿真曲線
表3為懸停水艙注排水速率為6.0 L/s、8.0 L/s、10.0 L/s、15.0 L/s、20.0 L/s時(shí)的懸停仿真數(shù)據(jù)。
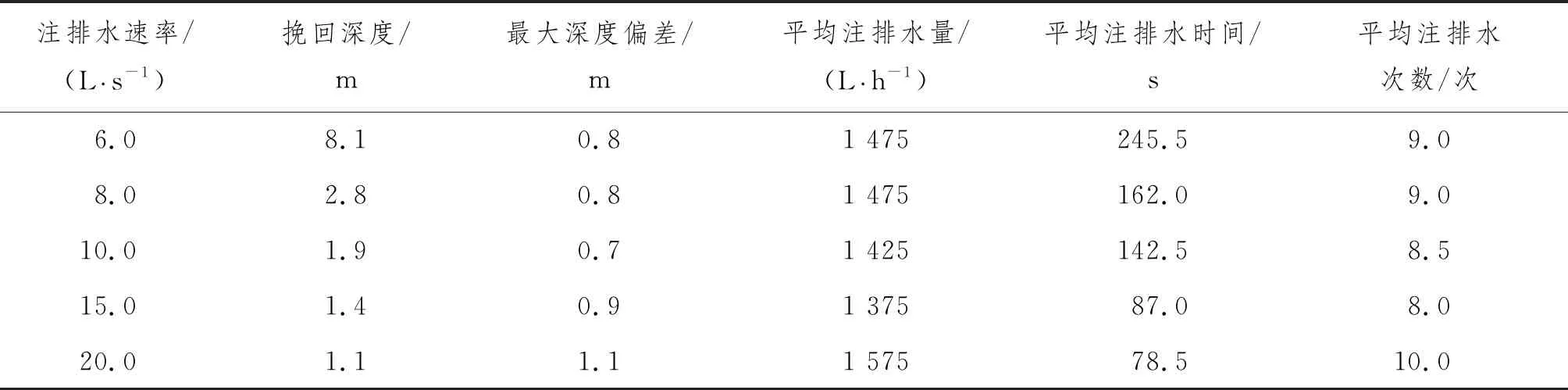
表3 注排水速率對(duì)潛艇懸停的影響
由仿真數(shù)據(jù)可看出:挽回深度和單位時(shí)間內(nèi)平均注排水時(shí)間基本上隨著注排水速率的增大而減小,但并不是注排水速率越大越有利于潛艇的懸停操縱;隨著注排水速率增加,雖然在累計(jì)單位時(shí)間內(nèi)平均注排水時(shí)間一直在減小,但平均注排水量變化趨勢是先減小后增大,平均注排水次數(shù)也是先減小后增大。
從有利于潛艇懸停的角度考慮:注排水速率不宜過小,太小的注排水速率使挽回深度、單位時(shí)間內(nèi)的平均注排水量、平均注排水時(shí)間和平均注排水次數(shù)均過大,不利于深度的穩(wěn)定;但注排水速率也不宜過大,過大的注排水速率在負(fù)梯度條件下反而使平均注排水量和平均注排水次數(shù)增大,會(huì)增大懸停水艙水泵的噪聲,不利于潛艇的隱蔽。總的來說,懸停水艙的注排水速率為10.0~15.0 L/s對(duì)潛艇的懸停控制效果最佳。
4.3 最小注排水量對(duì)懸停的影響
在潛艇懸停到達(dá)穩(wěn)定階段后,每次注排水的最小量定義為最小注排水量。最小注排水量對(duì)潛艇懸停操縱也是一個(gè)非常重要的因素。懸停仿真分析最小注排水量對(duì)懸停操縱的影響,圖7~圖9分別為最小注排水量為50 L、100 L、200 L時(shí)的懸停仿真曲線。仿真條件設(shè)置:海水密度梯度類型為負(fù)梯度(梯度值為-10-6),目標(biāo)懸停深度為100.0 m,懸停水艙注排水速率為10.0 L/s,懸停水艙閥門延遲時(shí)間為6.0 s,初始不均衡量為0.5 t。表4為最小注排水量為50 L、100 L、150 L、200 L、400 L時(shí)的懸停仿真數(shù)據(jù)。
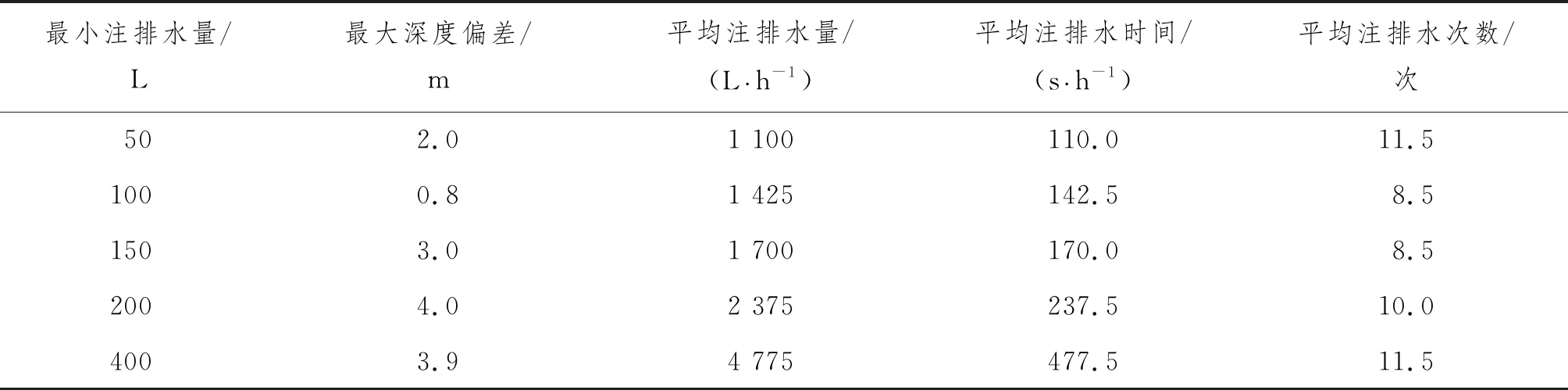
表4 最小注排水量對(duì)潛艇懸停的影響
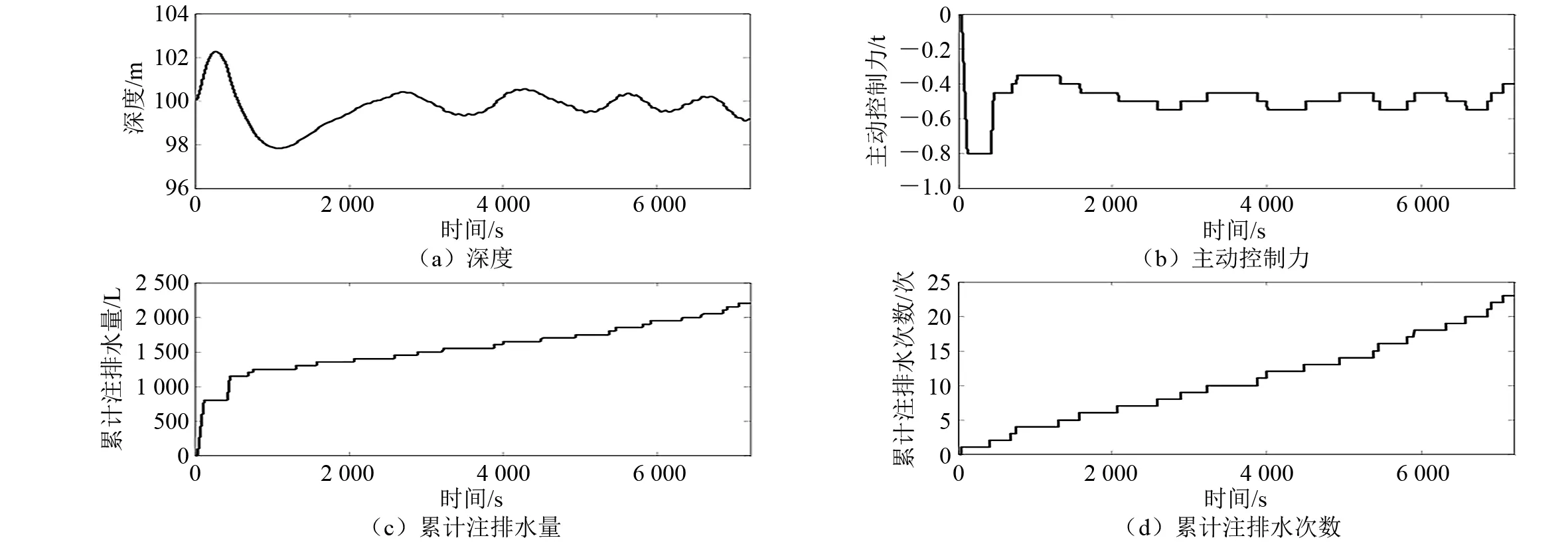
圖7 最小注排水量為50 L時(shí)的懸停仿真曲線
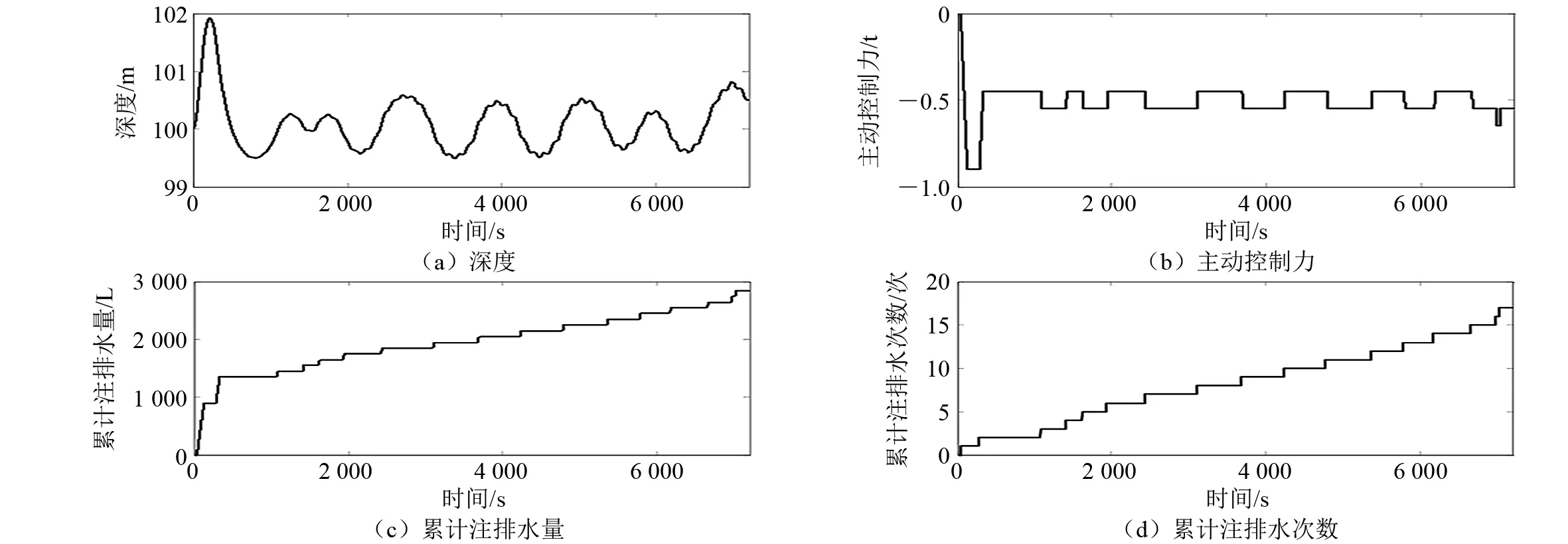
圖8 最小注排水量為100 L時(shí)的懸停仿真曲線
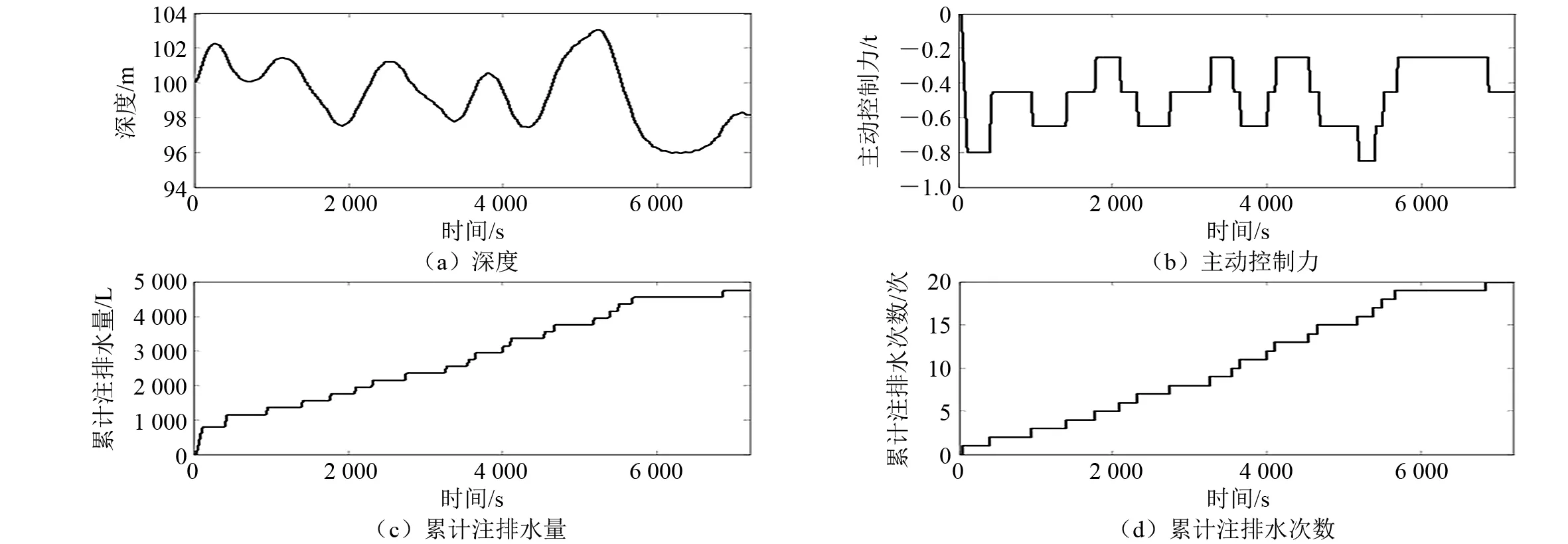
圖9 最小注排水量為200 L時(shí)的懸停仿真曲線
由仿真數(shù)據(jù)可看出:平均注排水量和平均注排水時(shí)間隨著最小注排水量的增加而增大,而平均注排水次數(shù)隨著最小注排水量的增大呈先減小后增大的規(guī)律。當(dāng)最小注排水量在50~100 L時(shí),懸停深度控制效果較好,單位時(shí)間內(nèi)平均注排水量和平均注排水時(shí)間不大,平均注排水次數(shù)也相對(duì)較小;最小注排水量超過200 L會(huì)引起深度急劇變化,甚至?xí)_(dá)到失控的程度。原因在于過大地控制水量形成較大的垂向速度,進(jìn)而形成較大的潛艇垂向慣性,一旦形成較大的慣性,加上注排水需要一定的時(shí)間,則會(huì)造成控制效果不理想。這說明在潛艇懸停中,只有采取小量多次的方式進(jìn)行才能防止?jié)撏纬上喾吹倪\(yùn)動(dòng)慣性,減少潛艇均衡頻度。
5 結(jié) 論
以潛艇懸停系統(tǒng)運(yùn)行品質(zhì)的3個(gè)關(guān)鍵指標(biāo),即流量計(jì)誤差、懸停水艙注排水速率和最小注排水量為參變量進(jìn)行懸停仿真,分析懸停系統(tǒng)運(yùn)行品質(zhì)對(duì)潛艇懸停的影響。研究表明:流量計(jì)誤差是導(dǎo)致單位時(shí)間內(nèi)均衡次數(shù)增加的一個(gè)很重要的原因,流量計(jì)誤差應(yīng)嚴(yán)格控制在0~0.5 L/s為宜;注排水速率越大,相同條件下的挽回深度越小,較大的注排水速率對(duì)于潛艇深度懸停控制的有效性就越大,但注排水速率也不是越大越好,過大的注排水速率會(huì)加大水泵的噪聲,而且隨著注排水速率的增加,單位時(shí)間內(nèi)的均衡次數(shù)非但沒有減少,反而有增加的趨勢,因此注排水速率取10.0~15.0 L/s可滿足懸停操縱的需要;為了不使?jié)撏г诖怪泵鎯?nèi)產(chǎn)生較大的慣性,最小注排水量不宜過大,在50~100 L效果最佳,既不會(huì)使?jié)撏Мa(chǎn)生較大的慣性,也可較好地對(duì)潛艇深度進(jìn)行有效控制。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48