某型機載光電設備激光校靶技術方法研究
2021-08-31 02:14:25拜飛王慶祥
航空維修與工程 2021年4期
拜飛 王慶祥
摘要:以某型機載光電探測設備為研究對象,通過對機載光電裝備的外場激光校靶工作機理和測試方法的研究分析,采用先進的多光譜采集技術和圖像算法技術,實現兼容多型機的機載光電設備激光校靶方法。該方法能大幅提高檢測效率和測試精度,有效規避測試中的人為差錯和安全隱患,對加強外場保障能力和圖像技術在機載設備維護中的推廣具有顯著意義。
關鍵詞:激光校靶;不平行度;圖像采集;圖像算法
Keywords: laser target calibration;nonparallelism;image acquisition;image algorithm
0 引言
機載光電設備的激光校靶工作是飛機機載光電探測設備的重要外場維護調校工作,它可實現激光發射軸、接收軸與紅外軸的同軸,進而實現與飛機機體的軸線一致,若激光光軸與紅外光軸及機體軸系的重合度達不到要求,將影響光電設備對已截獲的空中目標進行激光測距的測量準確性。
1 研究目的
目前外場光軸調校中校靶的方法是利用相紙對光斑進行采集,通過激光輻射對相紙中的曝光材質造成超閾值損傷的痕跡。存在的缺點是:相紙需要經常更換,無法重復利用,市場上符合要求的相紙采購困難;使用相紙試驗,近距在近200mJ的激光照射下痕跡仍然模糊難辨,對校準過程造成很大困擾;每次進行校靶時均需要人工將相紙從工裝上取下,并根據痕跡計算光斑坐標來確定需要校正的角度值;操作過程繁瑣,需要多人配合,且1064nm波段激光對人體有危害,在校準過程中對操作人員存在風險。因此,需要研究多光譜光軸調校特別是激光校準的新方法。
2 研制方案
2.1 方案概述
以某型機載光電探測設備為研究對象,對機載光電裝備的外場激光校靶工作機理和測試方法進行研究,決定采用先進的多光譜采集技術和圖像算法技術,研制外場多光譜光軸檢測調校設備,實現校靶方法改進。研究內容包括分析校準原理、制定校準方法、研制外場多光譜光軸檢測儀。
2.2 校準工作原理
如圖1所示,在距飛機機載光電探測設備20 m處放置靶板,在靶板與飛機機頭之間合適位置放置圖像采集設備(多光譜成像儀),飛機平顯校準后,打開靶板上的鹵素燈泡,對機載光電探測設備零位進行調試。關閉鹵素燈泡,輻射激光,在靶板上形成光斑,圖像采集設備對光斑進行采集,通過軟件對采集的光斑進行分析、顯示光斑中心坐標值與標準中心在Y軸和Z軸上的偏差,根據光斑中心坐標值來調節機載光電探測設備掃描鏡的位置。當光斑落在距靶板中心的范圍值(如3.5′或3′)內即為合格,無需調節。
2.3 研制外場多光譜光軸檢測儀
外場多光譜光軸檢測儀主要由圖像采集設備、變焦鏡頭、靶板、圖像分析和測量軟件以及供電裝置等組成。檢測儀工作原理如圖2所示,研制內容包括以下4個方面。
1)目標源模塊研制
目標源模塊由靶板和供電裝置組成。靶板需要滿足觀瞄、紅外信號源輸出和近紅外波段成像要求,靶板放置于距離輻射源20m處,機載光電探測設備掃描鏡的碼盤精度為1.32′,機上每次對光斑的調整為1.32′的倍數,通過計算得到1.32′對應的距離為7.66mm,則需定制滿足以下要求的靶板:
a. 靶板有效面積不小于361cm2、重量不大于5 kg;
b. 設置符合1064nm近紅外波段圖像校準的標的點,標的點為可見光;
c. 靶板中心設置紅外源,孔徑為(5±1)mm;
d. 靶板表面要求為1064nm近紅外漫反射或吸光材料,涂層或表面處理耐用不易損傷;
e. 靶板能裝配于外場靶板工裝上。供電裝置給靶板的紅外源和圖像校準標的點供電,采用充電電池組。
2)采集模塊
采集模塊由變焦鏡頭和CCD相機組成。變焦鏡頭參數為近攝距離2m,接口為C口,焦距為200mm可調。CCD相機分辨率為1280(H)×1024(V),圖像數據格式為Mono8/Mono10,數據接口為Mini USB3.0,鏡頭接口為C口。
通過變焦鏡頭的切換完成可見光與近紅外波段的轉換,通過設置CCD的曝光系數、幀頻設置等參數,確保采集最佳。
3)圖像處理模塊[1]
圖像處理模塊是利用軟件算法對采集的圖像進行處理,包含圖像校畸、質心計算、坐標計算和最終操作軟件的設計。圖像校畸是指采集面與成像面的位差,需通過圖像算法實現還原。質心計算是通過成像直接觀察光斑質心,根據圖像處理算法計算光斑質心。坐標計算是計算光斑質心與靶板中心的Y軸和Z軸方向的偏差。操作軟件包含人機互動界面、采集設備驅動嵌入、可見光瞄準調焦模式設計、采集控制、圖像設計、參數輸出以及記錄存儲等。
4)光斑測量處理
光斑測量的處理流程如圖3所示。
3 關鍵技術問題及解決措施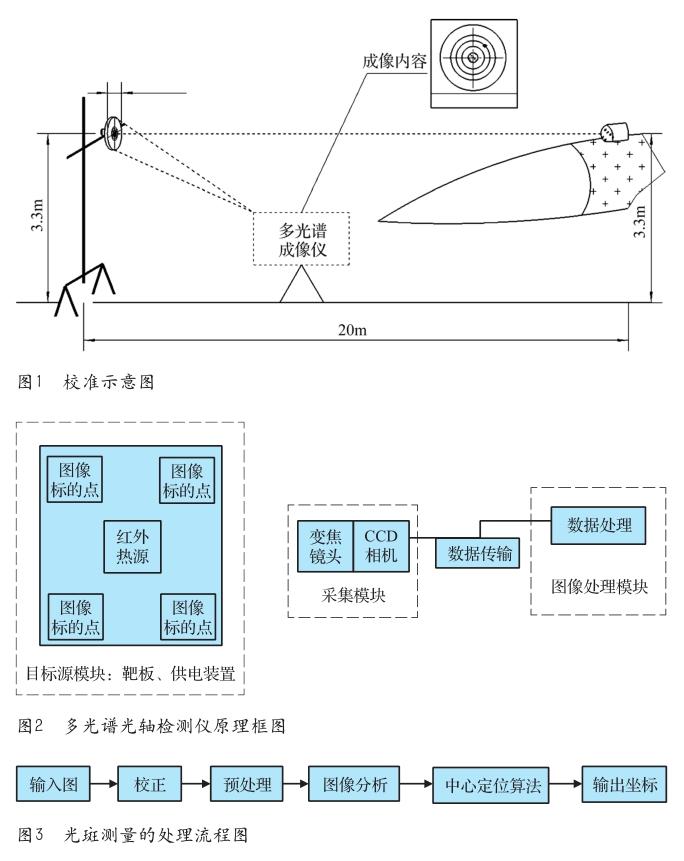
1)多光軸校準的工作模型搭建
存在問題:模型搭建過程中要保證靶板輸出各個波段的光互相不干擾,如靶板輸出紅外波段的信號能被機載光電探測設備截獲、靶板上用來標定的二極管信號能被相機采集且不影響光斑坐標解算等。
解決措施:在采集激光光斑時,靶板上標定的二極管也需常亮,因此選取焦距在200mm內可變的變焦鏡頭,確保二極管和激光光斑能同時被采集,使采集的靶板在電腦屏幕上得到最佳顯示,光斑清晰可見。
2)圖像處理
存在問題:如果光斑光強分布均勻,使用恰當的算法可以使光斑定位精度達到亞像素級別,但是在實際測量中可能有光斑存在散斑,加之目標物體的反射以及各種干擾,使得CCD相機采集到的光斑強度不夠均勻,影響了定位的精度。
解決措施:為有效克服噪聲及光強不均勻的問題,采用光斑中心定位算法[2,3]并設定光斑灰度閾值。只有當光斑圖像像素的亮度值大于該閾值才認為該像素屬于光斑圖像像素,參與解算光斑中心坐標。
4 外場多光譜光軸檢測儀的研制
1)組成
外場多光譜光軸檢測儀由靶板、供電裝置、圖像采集設備、圖像分析與測量軟件組成,檢測儀外形圖如圖4所示。
2)工作原理
該檢測儀既適用于外場某型機載光電探測設備激光校靶,也適用于其他類似機載光電探測設備激光光斑觀察和調校,可通過終端顯示設備觀察激光光斑及光斑中心相對于靶板中心的坐標。設備采購的器材采用市場上成熟穩定的產品,使用的元器件應選用工業級器件并采用標準零件。設備研制成功后,具有大專以上學歷的操作人員通過培訓能夠操作。
3)硬件
外場多光譜光軸檢測儀硬件包含靶板、靶板供電裝置、相機安裝座等。靶板由4個用來標的的二極管和1個紅外中心熱源組成。供電裝置為12V電池組,給靶板的四個標的點和中心熱源供電。
4)軟件
采用工業相機對靶板圖像進行采集,通過Halcon或OpenCV和C++混合編程開發的光斑測量軟件對圖像進行分析,得出測量數據結果后,輸出并存儲光斑坐標及對應圖片數據,系統構成如圖5所示。軟件由圖像采集、圖像處理和圖像測量三部分組成,軟件框圖如圖6所示。
圖像分析與測量軟件的功能包括:賬戶管理及登錄;光斑圖像顯示;光斑坐標顯示;光斑采集參數設置(如果不能正常識別到參考點或者目標光斑時,需要對參數進行調整)。
軟件界面如圖7所示,其中圖7a)為軟件主界面;圖7b)為不能正常識別 4個標的點的畫面,識別出的點顯示黃色,未識別出的點顯示灰色,只有當4個標的點均識別為黃色時軟件才能正常工作;圖7c)為正常識別4個標的點的畫面;圖7d)為目標識別的畫面,識別出的點顯示綠色。
5 研究成果
5.1 激光校靶方法
第一步是校靶準備工作,包括檢測儀相機驅動軟件安裝、檢測儀圖像處理軟件安裝和硬件連接。其中,硬件連接包括:將變焦鏡頭與相機連接,安裝于三角架;將靶板安裝于靶板架上,接通靶板電源;通過USB線連接相機和電腦(必須連接電腦的USB3.0接口,否則不能識別相機)。
第二步是進行相機連接測試。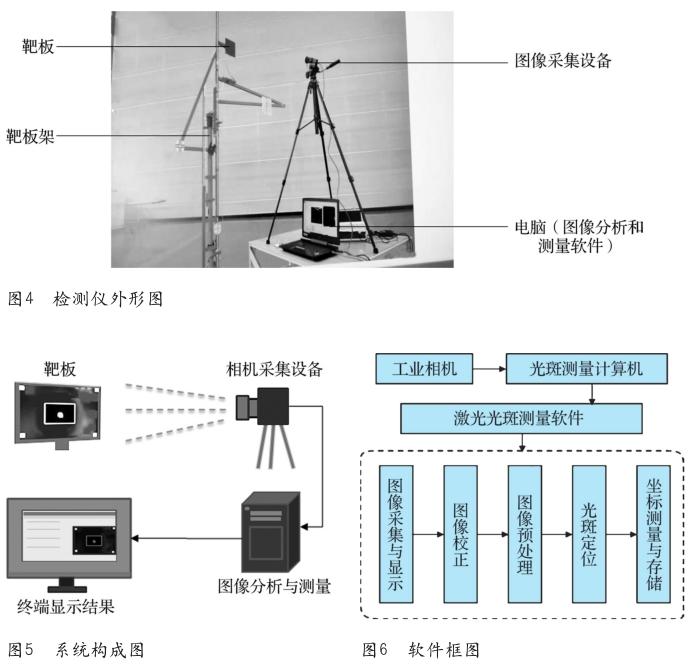
第三步是光斑校靶測量。首先進入主界面,在登錄窗口輸入密碼,單擊登錄按鈕進入主界面;進行參考點測量,調節相機三角架,使4個標的點都在可識別范圍內;最后進行光斑測量操作。
5.2 兩種校準方法流程對比
兩種校準方法操作流程的對比如圖 8所示。
多光譜光軸調校方法提高了光軸調校的工作效率,將原90min的校靶時間縮短至20min以內。另外,通過成像儀采集的光斑,軟件界面給出光斑中心坐標,根據中心坐標值輸入校正角度值,不僅方便外場維護人員操作,還能保證操作人員的安全。
6 結論
以某型機載光電探測設備為研究對象,通過對機載光電探測設備的工作機理和光軸不平行度測試方法研究分析,采用先進的圖像采集技術和圖像算法技術研制外場多光譜光軸檢測儀,制定新型激光校靶方法,實現新老機型可共用。該方法在外場對某型機載光電探測設備校靶的實際使用中,解決了原激光光斑調校方法存在的操作過程繁瑣、人員需求多、操作風險大等問題,大幅提高了檢測效率和測試精度,有效規避了測試中的人為差錯和安全隱患,避免了軍用波段激光對人體的危害。不僅可以縮短激光光斑調校工序操作時間,提高操作效率,還能保護操作人員,防止被激光誤傷。
本研究成果實現了圖像技術在機載光電設備維護中的應用,提高了加強外場保障能力和效率,可推廣供其他類似光電設備調校借鑒應用。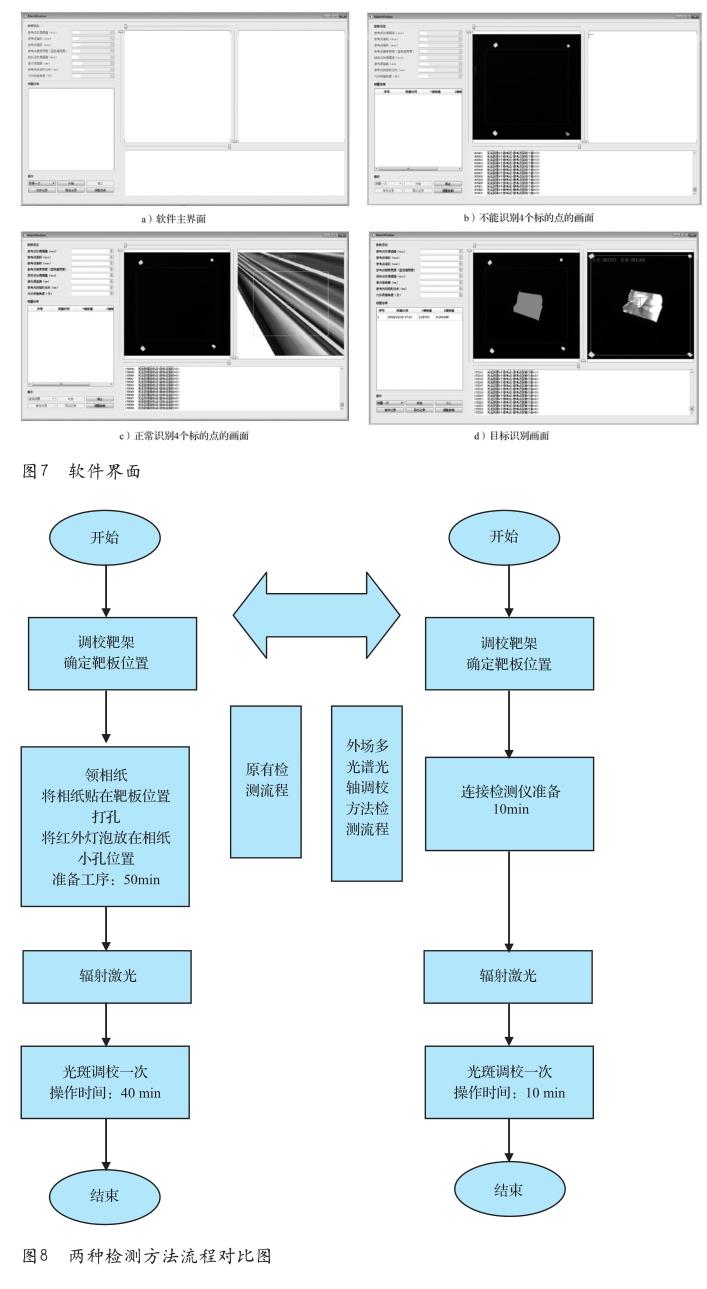
參考文獻
[1]張宇,于楓,馮毅,周昱含,李洋雙. CCD光斑中心空間定位系統的建模與數據處理[J].光電子激光. 2004,15(6).
[2]徐亞明,邢誠,劉冠蘭,唐楓.幾種激光光斑中心檢測方法的比較[J].海洋測繪. 2007,27(2).
[3]王芳榮,趙丁選,廖宗建,張宇.激光光斑中心空間定位方法的研究[J].激光技術. 2005,29(1).