最新算法無人機首次戰勝人類專家駕駛員機動能力可挑戰物理極限
2021-08-28 06:30:34
海外星云 2021年10期

該團隊的自主飛行四旋翼飛行器
近幾年,無人機大規模涌入公眾視野。無論是商業活動還是農業項目甚至火星勘測,無人機都已普及各行各業之中。尤其在面對搶險救災時,與傳統救援相比,無人機更有無法取代的優勢。
近日,蘇黎世大學機器人工程學博士生菲利普·焚風與其團隊在四旋翼自主飛行器(配置四個螺旋槳的無人機)上開發出一種新的計算方法。這種飛行算法可以讓無人機自主采取最佳飛行軌跡,并能根據不同障礙物進行提速和減速。
無人機受續航力限制,因此,需要在有限的時間內盡可能完成災區搜救、環境巡查、貨物運送等任務。在執行任務中,它們的航行軌跡也許會穿越如廢墟、森林、甚至窗戶等特定位置。所以,如何正確和快速地通過障礙找出最佳航行軌跡,是無人機執行任務中的重點。
新算法的動態示意圖
另據悉,相關論文近日以《四旋翼航路點飛行時間優化規劃》為題發表在Science Robotics。
論文第一作者焚風表示:“與以往描述飛行軌跡不同,這種算法的核心來自于機載攝像機和傳感器的輸入,無人機可以將獲取到的信息直接轉換為控制命令,這與人工神經網絡相似。不僅可以參考飛行軌跡對應進行模擬機動示,還可以通過訓練擴展各種不同的動作。”
研究的過程中,該團隊通過模擬飛行雜技動作來提升無人機的速度和靈活性,這種機動能力可能使無人機達到物理極限。并且在無人機電池續航里程內,更快的速度和更高的敏捷性將更有利于搜索和救援任務。

該團隊通過模擬飛行雜技動作來提升無人機的速度和靈活性,這種機動能力可能使無人機達到物理極限
蘇黎世大學機器人工程學教授大衛·斯卡拉穆扎對此表示:“即便是最好的人類無人機駕駛員,想要完成飛行雜技動作也是一種挑戰。”

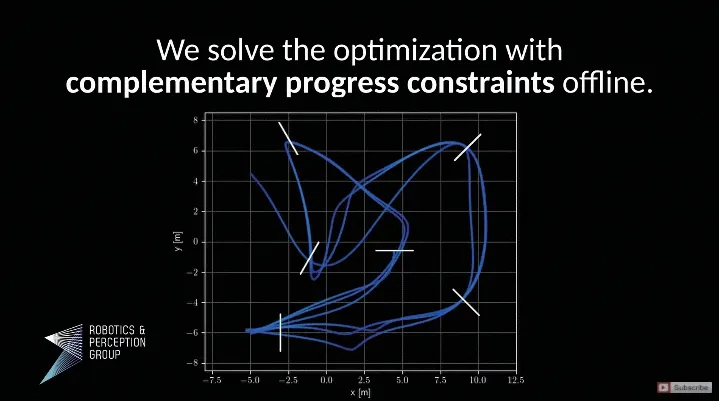
算法控制(藍色)與兩名人類駕駛員的飛行軌跡
長期以來,人類無人機駕駛員一直優于自主飛行系統。而在最近一次的無人機競賽中,研究團隊找到兩名專家級無人機駕駛員,并使用同樣的四旋翼飛行器進行比賽。為了保證公平競賽,人類駕駛員在賽道進行了提前訓練,但最終還是輸給了新研發的算法控制。
據了解,在競賽勝出的無人機設備重量約0.8公斤,推重比接近4,身上配備有Jetson TX2、萊爾德通信模塊和用于捕捉活動的紅外線標記器等。此外,研發團隊還通過互補約束技術優化通過的航點軌跡。

該團隊的自主飛行四旋翼飛行器

競賽的飛行軌跡,兩名人類專家級駕駛的無人機(上),最新算法控制的自主無人機(下)
研究團隊還分別在3.3和3.15的推重比下進行實驗。結果,最新算法依舊比人類駕駛員取得更優的單圈成績。該團隊介紹:“這種最新算法在速度和穩定性上都要更勝一籌。其實這并不奇怪,我們通過外部攝像頭一直在觀察無人機的運動模式,并且還給無人機提供所處位置的實時信息,只要算法找到了最優飛行軌跡,它就可以穩定、快速地無限重復。在這一點,人類很難實現。”
除了比賽,研究團隊為測試其算法的穩定性和有效性,對無人機做了大量機動飛行測試,包括動力循環、自主穿越飛行和各類花式翻滾等。在測試中過無人機承受著極端的角加速度和推力,即便如此,記載傳感器機身依舊沒有任何物理損傷。
這種最新算法無論在軍事、民用、商界都有巨大的應用潛力。未來,或許可以取代人類駕駛員完成更多任務。只是,在投入商用以前,研發團隊仍要解決“降低計算要求”的問題。
在目前階段,無人機想要以最優的時間完成飛行軌跡,仍需要提前數小時的計算準備工作。此外,在硬件方面研究團隊同樣希望可以改進加強,比如未來計劃搭載高分辨機載相機來替代目前的外部攝像頭。
斯卡拉穆扎表示,“雖然這次研究成果使無人機技術更進一步,不過人類駕駛員仍要比算法控制的自主無人機穩定,這是因為在面臨突發情況和意外時,人類駕駛員能夠更快地進行調整。”盡管如此,這位機器工程學的教授相信隨著全球衛星定位系統的不斷成熟,未來多旋翼無人機將滲入更多的應用領域。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
哈哈畫報(2022年4期)2022-04-19 11:11:50
汽車實用技術(2022年4期)2022-03-07 06:07:20
大科技·百科新說(2021年6期)2021-09-12 02:37:27
英語文摘(2021年2期)2021-07-22 07:56:54
好孩子畫報(2020年5期)2020-06-27 14:08:05
意林·全彩Color(2019年6期)2019-07-24 08:13:50
汽車電器(2018年1期)2018-06-05 01:22:54
公民與法治(2016年4期)2016-05-17 04:09:26