外骨骼式下肢助行機(jī)器人結(jié)構(gòu)設(shè)計(jì)及分析
2021-08-27 07:06:58桓茜,王偉
醫(yī)療衛(wèi)生裝備 2021年8期
關(guān)鍵詞:分析
桓 茜,王 偉
(陜西工業(yè)職業(yè)技術(shù)學(xué)院航空工程學(xué)院,陜西咸陽(yáng)712000)
0 引言
下肢外骨骼助行機(jī)器人是一種雙足動(dòng)力行走系統(tǒng),主要服務(wù)需要醫(yī)療康復(fù)、助力行走的人群[1-3]。目前外骨骼機(jī)器人的驅(qū)動(dòng)方式主要有氣壓驅(qū)動(dòng)、液壓驅(qū)動(dòng)及電動(dòng)機(jī)驅(qū)動(dòng)3種方式。氣動(dòng)驅(qū)動(dòng)設(shè)計(jì)簡(jiǎn)單,但驅(qū)動(dòng)力較小,控制精度較差。液壓驅(qū)動(dòng)的結(jié)構(gòu)緊湊,但驅(qū)動(dòng)力矩和響應(yīng)速度不夠平穩(wěn)。電動(dòng)機(jī)驅(qū)動(dòng)的安裝和控制方式比較簡(jiǎn)單,主要是通過(guò)安裝在人體下肢重要關(guān)節(jié)的關(guān)鍵自由度處來(lái)實(shí)現(xiàn)運(yùn)動(dòng)功能[4-6],但整體尺寸和質(zhì)量有所增加。
文獻(xiàn)[7]采用直流電動(dòng)機(jī)和諧波減速器驅(qū)動(dòng)外骨骼,電動(dòng)機(jī)與外骨骼垂直布置,軸向尺寸較大,承載不平穩(wěn)。文獻(xiàn)[8]在髖關(guān)節(jié)兩側(cè)垂直布置了驅(qū)動(dòng)電動(dòng)機(jī),膝關(guān)節(jié)采用四連桿機(jī)構(gòu),并依靠髖關(guān)節(jié)的慣性力作為驅(qū)動(dòng)源,除了髖關(guān)節(jié)之外,其他關(guān)節(jié)自由度都是被動(dòng)的。文獻(xiàn)[9]設(shè)計(jì)了步進(jìn)電動(dòng)機(jī)和彈性元件驅(qū)動(dòng)外骨骼,增加了機(jī)構(gòu)的柔順性,但外骨骼的驅(qū)動(dòng)響應(yīng)的穩(wěn)定性較差。
本文設(shè)計(jì)一種伺服電動(dòng)機(jī)驅(qū)動(dòng)的外骨骼式下肢助行機(jī)器人的機(jī)械結(jié)構(gòu),伺服電動(dòng)機(jī)通過(guò)一個(gè)錐齒輪換向裝置實(shí)現(xiàn)與機(jī)器人腿部平行布置方式,增加了機(jī)構(gòu)運(yùn)動(dòng)的平穩(wěn)性。利用ABAQUS軟件求解機(jī)器人在不同運(yùn)動(dòng)姿態(tài)下的應(yīng)力和形變,通過(guò)機(jī)械系統(tǒng)動(dòng)力學(xué)自動(dòng)分析(automatic dynamic analysis of mechanical systems,ADAMS)軟件求解各關(guān)節(jié)的運(yùn)動(dòng)學(xué)曲線,以為機(jī)器人機(jī)械的結(jié)構(gòu)改進(jìn)和控制設(shè)計(jì)提供一定的依據(jù)和支撐。
1 外骨骼式下肢助行機(jī)器人機(jī)械結(jié)構(gòu)設(shè)計(jì)
1.1 外骨骼式下肢助行機(jī)器人特征
外骨骼式下肢助行機(jī)器人各段長(zhǎng)度設(shè)計(jì)為:臀部寬327 mm,大腿長(zhǎng)度430 mm,小腿長(zhǎng)度372 mm,足長(zhǎng)260 mm,足寬102 mm。設(shè)計(jì)的每個(gè)關(guān)節(jié)部位應(yīng)有一定的長(zhǎng)度可調(diào)節(jié)性[10-11],承載人體質(zhì)量為50~70 kg。
從人體生物運(yùn)動(dòng)機(jī)理上,髖部和踝部機(jī)構(gòu)需要3個(gè)方位的活動(dòng),膝部機(jī)構(gòu)需要1個(gè)方位的活動(dòng)[8],具體運(yùn)動(dòng)形式見(jiàn)表1。
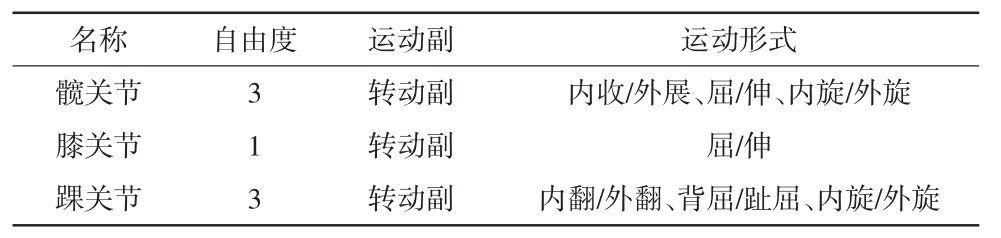
表1 下肢各關(guān)節(jié)的運(yùn)動(dòng)形式
1.2 外骨骼式下肢助行機(jī)器人樣機(jī)結(jié)構(gòu)設(shè)計(jì)
伺服電動(dòng)機(jī)驅(qū)動(dòng)的外骨骼式下肢助行機(jī)器人結(jié)構(gòu)如圖1所示,其中膝部構(gòu)件僅有一個(gè)屈/伸運(yùn)動(dòng)形式,髖部構(gòu)件包含髖關(guān)節(jié)的3個(gè)運(yùn)動(dòng)形式。為了滿(mǎn)足助行機(jī)器人安裝和驅(qū)動(dòng)的穩(wěn)定性,只分別在髖部構(gòu)件和膝部構(gòu)件處安裝一個(gè)伺服電動(dòng)機(jī),踝部構(gòu)件的運(yùn)動(dòng)依賴(lài)人體行走的慣性。為滿(mǎn)足不同患者身高的要求,將大腿和小腿構(gòu)件設(shè)計(jì)為長(zhǎng)度可調(diào)節(jié)(5~10 cm)的剛性桿件。

圖1 外骨骼式下肢助行機(jī)器人系統(tǒng)結(jié)構(gòu)圖(單位:mm)
如圖2所示,在膝關(guān)節(jié)(髖關(guān)節(jié))處利用直角錐齒輪換向裝置使驅(qū)動(dòng)電動(dòng)機(jī)與大小腿構(gòu)件實(shí)現(xiàn)平行布置方式。此外,為了減小地面對(duì)人體和外骨骼的剛性沖擊,在小腿處設(shè)計(jì)有彈簧緩沖裝置,以達(dá)到減震的效果。
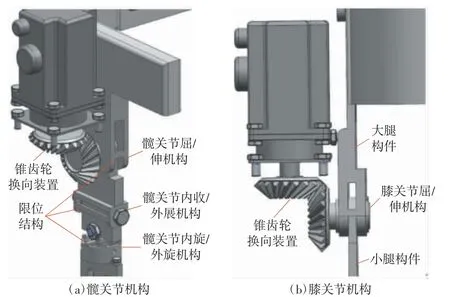
圖2 錐齒輪換向裝置
2 外骨骼式下肢助行機(jī)器人的結(jié)構(gòu)靜力學(xué)分析
在一個(gè)完整的運(yùn)動(dòng)周期內(nèi),選取其中4個(gè)不同的關(guān)鍵步態(tài)對(duì)下肢構(gòu)件進(jìn)行應(yīng)力與形變分析,不同步態(tài)模式(gait model,GM)下的關(guān)節(jié)角度見(jiàn)表2。
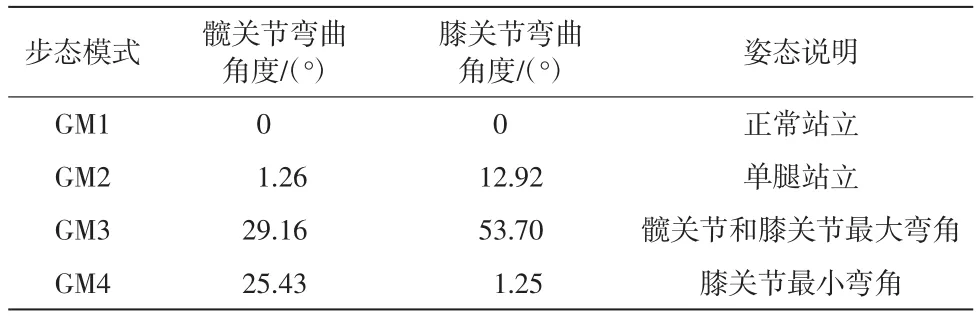
表2 不同步態(tài)模式的關(guān)節(jié)角度
由于外骨骼式下肢助行機(jī)器人的機(jī)械結(jié)構(gòu)主要是髖部和膝部承載受力,在靜力學(xué)分析時(shí)將影響較小的雙足省掉,將支架和驅(qū)動(dòng)機(jī)構(gòu)簡(jiǎn)化為各段的載荷,基于ABAQUS軟件對(duì)下肢助行機(jī)器人進(jìn)行靜力學(xué)分析,具體設(shè)置內(nèi)容如下:
(1)截面屬性:各構(gòu)件采用高強(qiáng)度不銹鋼材料,其密度為7.9 kg/cm3,彈性模量為206 GPa,泊松比為0.33,彎曲強(qiáng)度為207 MPa。
(2)邊界條件:膝部構(gòu)件之間定義為表面-表面接觸,其他定義為綁定約束;膝部連接處設(shè)置1個(gè)自由度,其余連接處為固定支撐[12-13]。
(3)定義載荷:髖關(guān)節(jié)和膝關(guān)節(jié)的驅(qū)動(dòng)分別等效為60和35 N的重力。假定人體質(zhì)量為71 kg,大腿的相對(duì)質(zhì)量為14.19%(99.6 N),小腿的相對(duì)質(zhì)量為3.67%(25.6 N),足部的相對(duì)質(zhì)量為1.48%(10.36 N),其余體段的相對(duì)質(zhì)量為27.04%(564.62 N)。
在ABAQUS軟件中,在下肢助行機(jī)器人的各承載點(diǎn)處建立參考點(diǎn),并將參考點(diǎn)與各承載表面耦合分布,將人體各體段的質(zhì)量分別加載到相應(yīng)位置。對(duì)其中一側(cè)機(jī)構(gòu)進(jìn)行分析,圖3為不同步態(tài)模式下的分析結(jié)果。
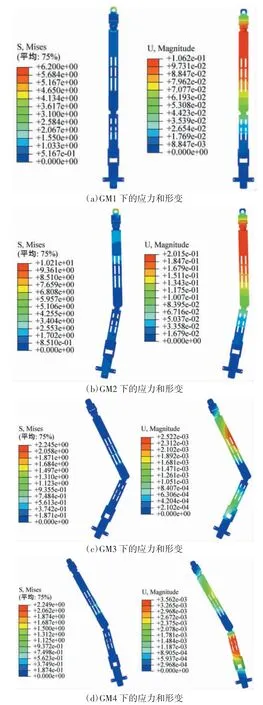
圖3 不同步態(tài)模式下的應(yīng)力(左)和形變(右)
由圖3可知,在4個(gè)不同的步態(tài)模式下,支撐相(GM1和GM2)的應(yīng)力和形變大于擺動(dòng)相(GM3和GM4)。在支撐相中,助行機(jī)器人承受人體全部質(zhì)量,其最大形變和應(yīng)力分別為0.20 mm和10.21 MPa,形變區(qū)域主要分布在膝關(guān)節(jié)處,最大形變出現(xiàn)在髖關(guān)節(jié)處。在擺動(dòng)相中,當(dāng)髖關(guān)節(jié)和膝關(guān)節(jié)具有最大彎曲角度時(shí),其最大形變和應(yīng)力分別為0.002 5 mm和2.25 MPa;當(dāng)膝關(guān)節(jié)具有最小彎曲角度時(shí),其最大形變和應(yīng)力分別為0.003 5 mm和2.25 MPa。
3 外骨骼式下肢助行機(jī)器人的運(yùn)動(dòng)學(xué)分析
在圖1所示的外骨骼式下肢助行機(jī)器人的機(jī)械結(jié)構(gòu)中,將O0X0Y0Z0坐標(biāo)系建立在其背帶架的中心位置(即人體臀部中心)。以單側(cè)機(jī)構(gòu)為對(duì)象,簡(jiǎn)化為6桿機(jī)構(gòu),對(duì)應(yīng)的D-H模型如圖4所示。
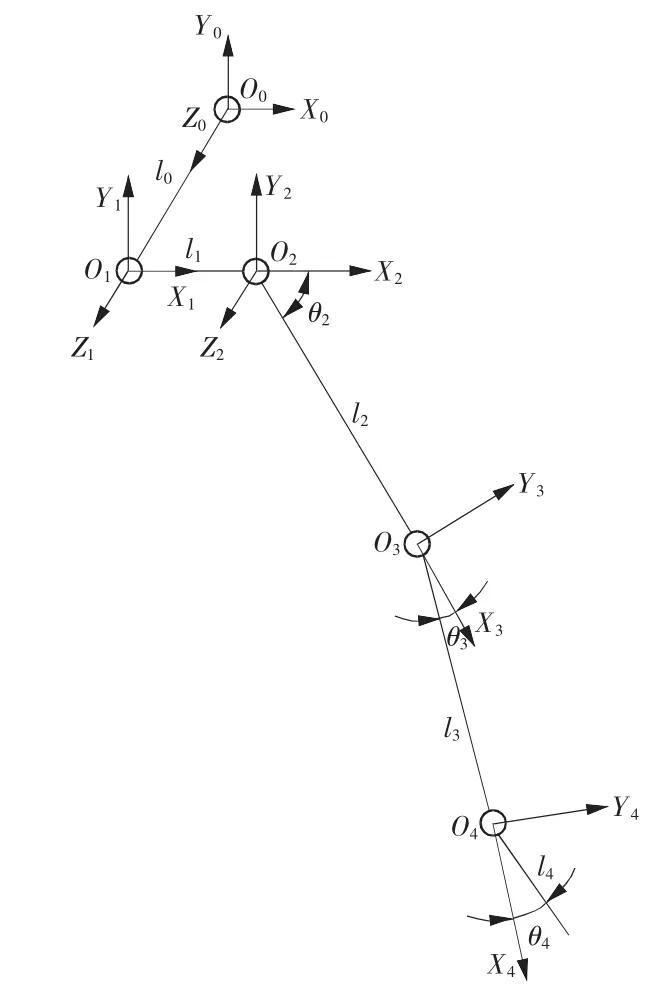
圖4 D-H模型
相鄰桿件的位姿矩陣分別如下:

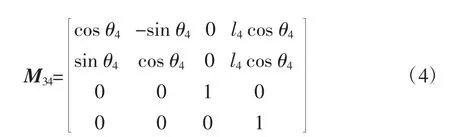
同理可得[9],髖關(guān)節(jié)、膝關(guān)節(jié)和踝關(guān)節(jié)相對(duì)于坐標(biāo)系O0X0Y0Z0的齊次坐標(biāo)方程為
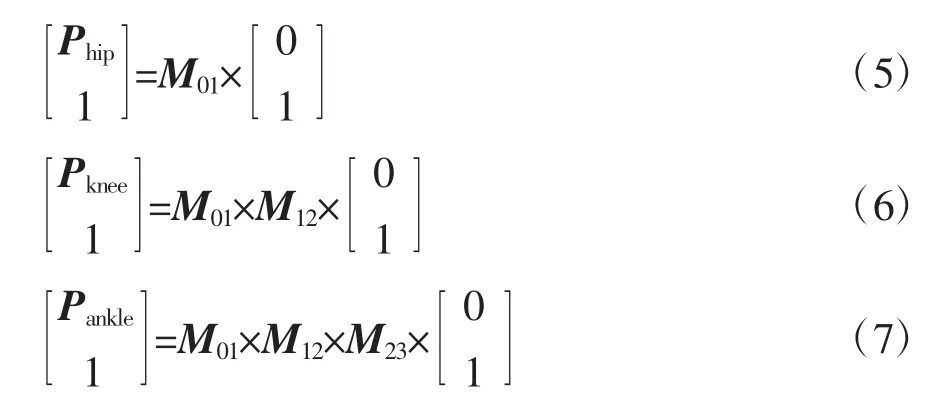
式中,Phip為髖關(guān)節(jié)的坐標(biāo)方程;Pknee為膝關(guān)節(jié)的坐標(biāo)方程;Pankle為踝關(guān)節(jié)的坐標(biāo)方程。
利用ADAMS軟件對(duì)助行機(jī)器人機(jī)械結(jié)構(gòu)進(jìn)行仿真研究。為了便于分析,將助行機(jī)器人的驅(qū)動(dòng)電動(dòng)機(jī)、換向裝置和彈簧緩沖裝置簡(jiǎn)化掉;各關(guān)節(jié)設(shè)置為旋轉(zhuǎn)約束,髖部支架設(shè)置為移動(dòng)約束;各關(guān)節(jié)的驅(qū)動(dòng)函數(shù)分別為AKISPL(time,0,SPLINE_1,0)*1d等[14]。
在一個(gè)步態(tài)周期內(nèi)(1.5 s)各關(guān)節(jié)的角度和位移變化曲線如圖5、6所示。

圖5 各關(guān)節(jié)的角度變化曲線
從圖5可看出下肢助行機(jī)器人運(yùn)動(dòng)連續(xù),左腿和右腿為反對(duì)稱(chēng)變化,下肢助行機(jī)器人與人體關(guān)節(jié)角度變化一致,符合人體步態(tài)特征。
以左腿結(jié)構(gòu)處于豎直狀態(tài)為例,由公式(5)~(7)可得

由于髖關(guān)節(jié)處的坐標(biāo)系相對(duì)于參考點(diǎn)是固定不變的,故圖6中髖關(guān)節(jié)在水平和豎直方向上的位移變化為固定值,分別為100和65 mm。在D-H理論分析中,未考慮髖關(guān)節(jié)及其支架實(shí)際裝配的尺寸,故Phip在Y方向的值為0。
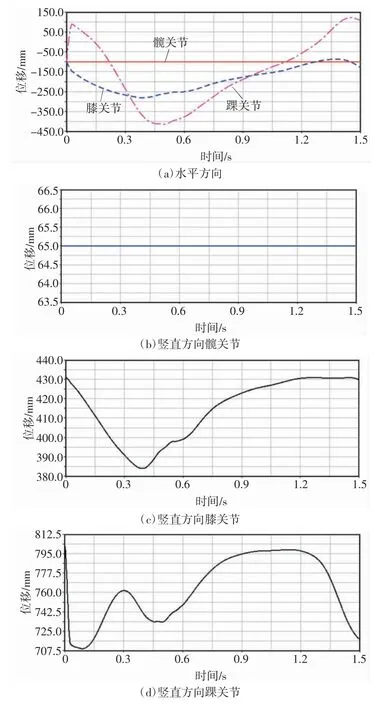
圖6 各關(guān)節(jié)的位移變化曲線
如圖6所示,在1.26 s時(shí)刻,大腿處于豎直狀態(tài),膝關(guān)節(jié)最大位移值為430 mm,踝關(guān)節(jié)最大位移值為802 mm(大腿和小腿均處于豎直狀態(tài)),則對(duì)應(yīng)的小腿桿件長(zhǎng)372 mm,這與理論分析一致。在0.38 s時(shí)刻,大腿處于最高狀態(tài),膝關(guān)節(jié)水平方向最大位移值為279 mm;在0.49 s時(shí)刻,踝關(guān)節(jié)水平方向最大位移值為412 mm。
4 結(jié)語(yǔ)
本文設(shè)計(jì)了一款伺服電動(dòng)機(jī)驅(qū)動(dòng)的外骨骼式下肢助行機(jī)器人,利用ABAQUS軟件分析了4種關(guān)鍵步態(tài)下膝關(guān)節(jié)的應(yīng)力和形變,顯示應(yīng)力區(qū)域主要在膝關(guān)節(jié)處,所設(shè)計(jì)機(jī)器人結(jié)構(gòu)符合靜力學(xué)要求。利用ADAMS軟件分析了助行機(jī)器人的位置變化曲線,仿真結(jié)果與D-H模型計(jì)算結(jié)果一致,符合人體下肢運(yùn)動(dòng)特征,能夠?yàn)橹袡C(jī)器人的機(jī)械結(jié)構(gòu)優(yōu)化和控制設(shè)計(jì)提供一定的依據(jù)和參考。但在應(yīng)力和形變分析中還需進(jìn)一步改進(jìn),由于助行機(jī)器人的運(yùn)動(dòng)狀態(tài)是復(fù)雜變化的,存在慣性力和沖擊力的影響,需進(jìn)一步結(jié)合非線性動(dòng)力學(xué)分析應(yīng)力和形變隨時(shí)間的動(dòng)態(tài)變化。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
財(cái)經(jīng)界(學(xué)術(shù)版)(2015年20期)2015-12-23 09:20:13
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
- 醫(yī)療衛(wèi)生裝備的其它文章
- 戰(zhàn)術(shù)戰(zhàn)傷救治模擬訓(xùn)練裝備器材體系建設(shè)高效能實(shí)現(xiàn)路徑
- 火箭軍核應(yīng)急專(zhuān)用個(gè)人防護(hù)背囊內(nèi)容物的設(shè)計(jì)
- 淺談麻醉機(jī)罕少故障與圍術(shù)期醫(yī)療安全
- 雅培Alinity i全自動(dòng)化學(xué)發(fā)光免疫分析儀常見(jiàn)故障報(bào)警代碼分析及處理
- DECT在陰性膽結(jié)石診斷中的研究進(jìn)展
- 基于腦網(wǎng)絡(luò)的圖卷積神經(jīng)網(wǎng)絡(luò)在腦疾病中的研究進(jìn)展