月表采樣器智能自主運動控制方法及驗證
2021-08-22 05:24:56張紅軍周東李珂張沛韋涌泉于萌萌
航天器工程 2021年4期
張紅軍 周東 李珂 張沛 韋涌泉 于萌萌
(北京空間飛行器總體設(shè)計部,北京 100094)
開展月球探測是航天活動發(fā)展的必然選擇,我國開展月球探測對于提高綜合國力,振奮民族自尊心和增強民族凝聚力具有重要意義[1-2]。月壤樣品的采集返回是各航天大國研究月球的主要手段,我國嫦娥五號探測器是探月工程“三步走”戰(zhàn)略的最后一步,其總體目標是實現(xiàn)中國首次月面自主采樣與返回[3]。國內(nèi)高校、科研機構(gòu)針對該任務(wù)需求,在采樣裝置設(shè)計等方面開展了大量的研究工作,取得了一定的研究成果[3-4]。月球采樣方式可以分為兩大類:表面月壤采樣和深層月壤采樣。表面采樣一般使用挖、鏟、夾、耙、吸等方式,而深層月壤采樣一般使用鉆探方式進行[5]。
2020年11月,嫦娥五號探測器攜帶采集的月壤樣品成功返回,標志著我國探月工程“三步走”計劃圓滿完成。嫦娥五號探測器同時裝備了表面采樣和深層采樣設(shè)備,其中月表采樣器采用淺層鏟挖的采樣方式,由于地月距離遠導(dǎo)致地月交互效率低,因此在月表采樣過程中需要具有很高的自主性,即地球站上注少量的簡單指令就能觸發(fā)采樣器完成復(fù)雜的運動序列來進行采樣。
以抽象的數(shù)學(xué)方式描述知識的結(jié)構(gòu)及其之間的關(guān)系,具有很強的表達能力,可為軟件系統(tǒng)的層次結(jié)構(gòu)提供形式化的語義描述[6]。雖然采樣器具有多種運動模式、速度、目標位置、運動狀態(tài)等,但其表述有固定的模式,其核心內(nèi)容可以抽象為一系列狀態(tài)、事件、狀態(tài)遷移、動作等元素的集合,非常適合用有限狀態(tài)機相關(guān)理論進行處理,將采樣器的運動控制用統(tǒng)一的數(shù)學(xué)模型表達[7]。
本文針對該采樣器,建立挖掘鏟和伸縮鏟的運動模型,設(shè)計了一種基于模型的智能自主運動控制方法,實現(xiàn)軟件對采樣器多種運動模式的控制,簡化地球站的操作過程,提升采樣器自主運動的能力。
1 采樣器智能自主運動控制方法
1.1 采樣器運動系統(tǒng)構(gòu)成
月球探測一般可分為載人探測和無人探測,無人探測技術(shù)風(fēng)險較小,能夠在非常惡劣的深空環(huán)境中開展長期探測,無人探測任務(wù)中常用到機械臂[8]。月球表面采樣任務(wù)就是一種無人探測任務(wù),我國月球表面采樣工作由月表采樣機械臂系統(tǒng)完成,機械臂共4個關(guān)節(jié),即肩偏航關(guān)節(jié)(關(guān)節(jié)一)、肩俯仰關(guān)節(jié)(關(guān)節(jié)二)、肘關(guān)節(jié)(關(guān)節(jié)三)、腕關(guān)節(jié)(關(guān)節(jié)四),其中腕關(guān)節(jié)(機械臂末端)處安裝采樣器。運動控制單元中裝載機械臂智能運動控制軟件,控制4個關(guān)節(jié)和末端采樣器運動,運動控制軟件接收到地球站上注的月表采樣點目標位置后,自主規(guī)劃機械臂的運動路徑,控制機械臂末端運動到采樣點上方,隨后控制采樣器運動進行月表鏟挖采樣。機械臂系統(tǒng)組成如圖1所示。
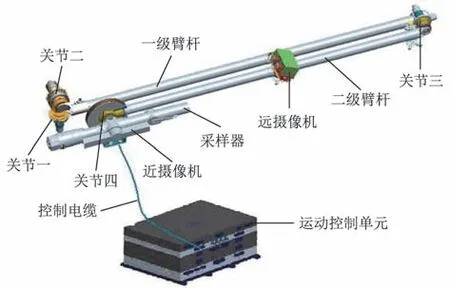
圖1 機械臂系統(tǒng)組成Fig.1 System configuration of sampling manipulator
表層的月壤采樣面對的是比較松散的風(fēng)化層土壤,對于表層松散月壤,可以采用鏟挖的方式獲取。為了提高采樣器的機動性,將鏟挖分為鏟取與挖取兩個動作[9]。采樣器示意如圖2所示,采樣器由挖掘鏟和伸縮鏟兩個運動部件組成,挖掘鏟運動為繞固定軸轉(zhuǎn)動,伸縮鏟運動為直線運動,兩個運動部件在采樣器內(nèi)部分別由一個無刷直流電機來驅(qū)動,兩個運動部件的輸出力矩與電機的輸入電流成正比[10]。運動控制軟件根據(jù)運動部件的期望運動模式,生成相應(yīng)電機的期望速度、期望位置等,輸出給運動控制FPGA;運動控制FPGA 根據(jù)接收到的控制參數(shù)生成驅(qū)動信號來控制電機運動,從而驅(qū)動兩個運動部件運動。
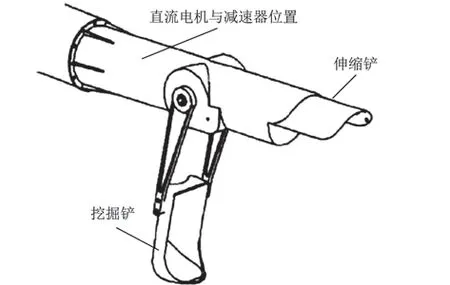
圖2 采樣器示意圖Fig.2 Schematic diagram of sampler
采樣器運動系統(tǒng)的組成及控制流示意如圖3所示。
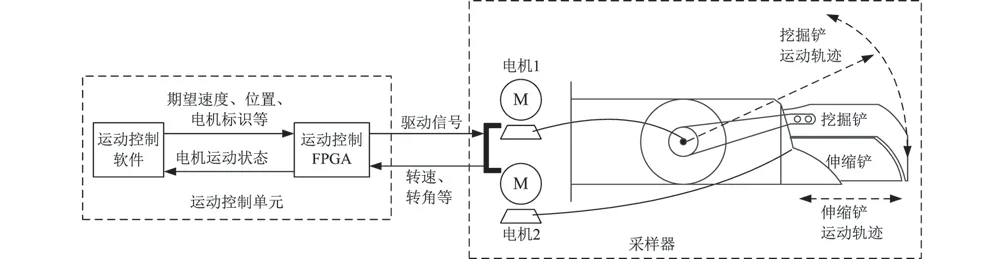
圖3 采樣器系統(tǒng)組成示意圖Fig.3 Schematic diagram of sampler system composition
根據(jù)月表采樣需求,挖掘鏟和伸縮鏟分別設(shè)計了兩種運動模式:挖掘鏟打開和挖掘鏟關(guān)閉,伸縮鏟伸出和伸縮鏟收回。此外還設(shè)計了一種復(fù)合模式:復(fù)位,用于恢復(fù)挖掘鏟和伸縮鏟的初始狀態(tài)。采樣器系統(tǒng)針對每種運動模式,分別設(shè)計一條指令,地球站通過上注指令來觸發(fā)采樣器運動。運動控制軟件接收地球站上注的指令,按照指令指定的模式給運動控制FPGA 輸出電機標識、期望速度、期望位置等信息,運動控制FPGA 根據(jù)這些信息生成驅(qū)動電機的脈沖寬度調(diào)制(PWM)信號,最終驅(qū)動挖掘鏟和伸縮鏟按照既定目標運動。
1.2 挖掘鏟和伸縮鏟的運動模型
挖掘鏟和伸縮鏟的運動模型分為邏輯模型和參數(shù)模型,邏輯模型通過抽象部件的運動流程而形成,是軟件控制部件自主運動的過程特性;參數(shù)模型通過抽象部件運動的各控制參數(shù)而形成,是軟件控制部件運動過程中的量化特性。
1)邏輯模型
部件的一次單行程運動抽象為一個動作,動作與電機一一對應(yīng),具有確定的運動速度、目標位置以及運動到位的判定方法。部件的一個運動流程包含一個或多個動作,用來完成采樣器的一項運動,例如,采樣器復(fù)位、挖掘鏟打開、挖掘鏟關(guān)閉、伸縮鏟伸出和伸縮鏟收回等。流程和動作的關(guān)系示意如圖4所示。
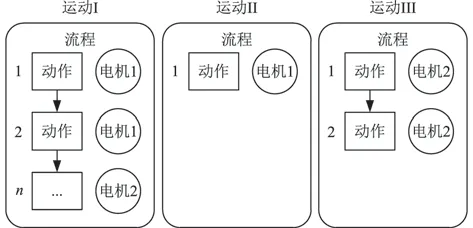
圖4 流程和動作的關(guān)系示意圖Fig.4 Schematic diagram of the relationship between process and action
將部件的一個動作過程分為5個階段:初始階段、就緒階段、啟動階段、結(jié)束判定階段和狀態(tài)恢復(fù)階段。運動控制軟件接收到地球站上注的指令后在5個階段之間遷移,完成部件的一個動作過程控制。建立部件動作過程中各階段轉(zhuǎn)移的狀態(tài)機模型,如圖5所示。

圖5 邏輯模型的動作階段轉(zhuǎn)移圖Fig.5 Action phase transition diagram of the logical model
運動控制軟件接收地球站上注的指令,按照圖5所示狀態(tài)轉(zhuǎn)換關(guān)系控制采樣器運動,從參數(shù)模型中提取運動控制參數(shù),控制挖掘鏟和伸縮鏟部件運動,以部件動作為原子運動單元,開展靈活組裝,即可實現(xiàn)采樣器復(fù)雜運動的智能自主控制,采樣器運動控制流程如圖6所示。
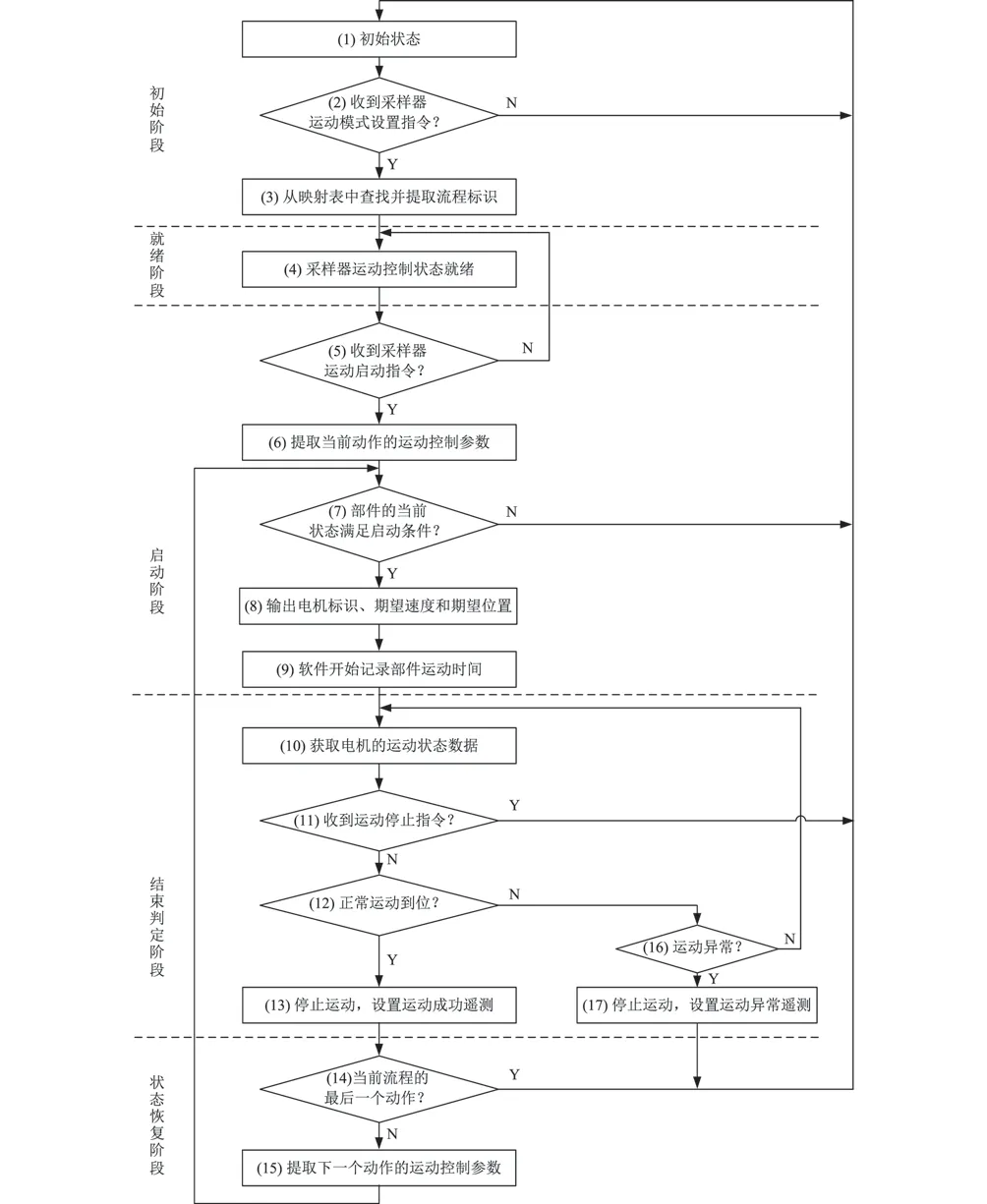
圖6 采樣器運動控制流程Fig.6 Sampler motion control flow
2)參數(shù)模型
參數(shù)模型的意義是對于采樣器包含多個動作的復(fù)雜運動流程而言,只需要配置各個參數(shù),并按照流程需求進行動作排序,邏輯模型按照運動控制流程執(zhí)行過程中在各狀態(tài)調(diào)度相應(yīng)參數(shù)則可以自主完成采樣器的運動控制。
對采樣器運動流程中的控制參數(shù)進行抽象、分類與合并,形成運動流程的參數(shù)模型。參數(shù)模型中的參數(shù)包括動作個數(shù)、當前動作標識與執(zhí)行順序、下一個動作標識、動作結(jié)束時位置保持標識、部件運動到位的判定方式、部件運動到位的期望位置、期望的運動速度等,如圖7所示。
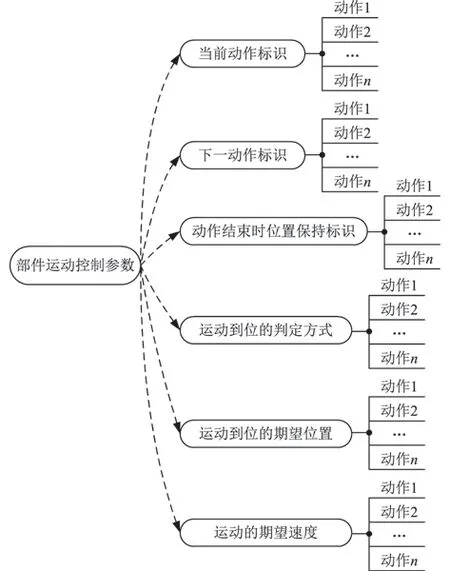
圖7 部件運動控制參數(shù)模型示意圖Fig.7 Diagram of component motion control parameter model
2 采樣器運動控制試驗驗證
2.1 運動零位與方向定義
挖掘鏟的零位為閉合狀態(tài),閉合為正向運動,伸縮鏟的零位為收回狀態(tài),伸出為正向運動。挖掘鏟和伸縮鏟的運動零位和方向示意如圖8所示。
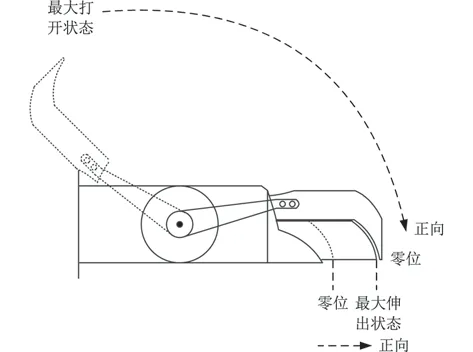
圖8 采樣器的零位和運動方向Fig.8 Initial position and movement direction of sampler
以采樣器復(fù)位流程為例,共包括4 個動作,見表1。
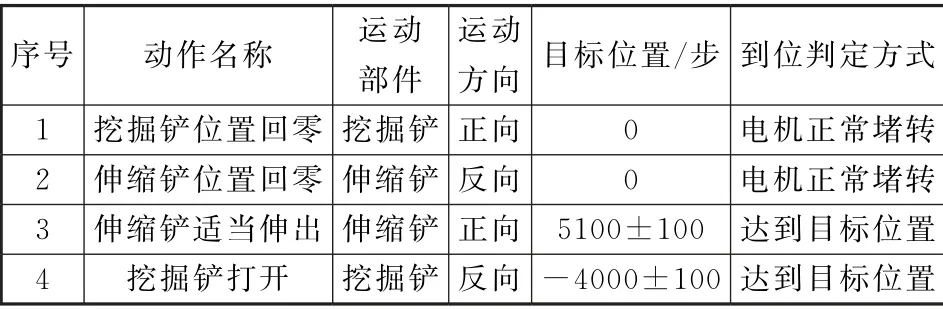
表1 采樣器復(fù)位流程動作解析Table 1 Sampler reset process action parsing
2.2 驗證情況
經(jīng)過多次測試驗證,地球站只需要發(fā)送一條復(fù)位指令,采樣器均能自主完成復(fù)位運動,復(fù)位過程中挖掘鏟和伸縮鏟的運動平穩(wěn),4個動作之間的銜接流暢無突變,運動結(jié)束后的狀態(tài)滿足指標要求,其中兩次的運動過程曲線如圖9~10所示,運動結(jié)束后的實際位置見表2,第一次挖掘鏟由閉合狀態(tài)開始復(fù)位,第二次挖掘鏟由打開狀態(tài)開始復(fù)位,兩次復(fù)位伸縮鏟均由完全伸出狀態(tài)開始復(fù)位,第一次復(fù)位用時101 s,第二次復(fù)位用時115 s。
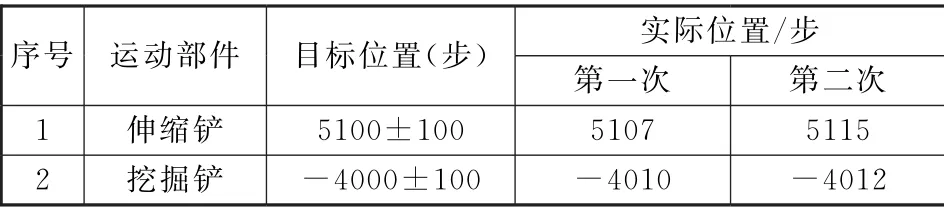
表2 復(fù)位后兩部件的位置(地球?qū)嶒炇?Table 2 Position of the two components after reset(in earth labs)
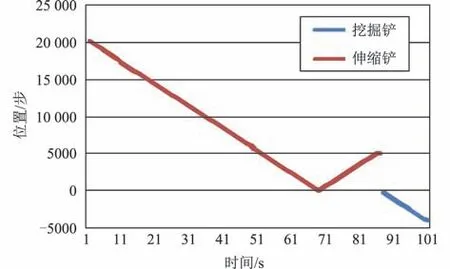
圖9 第一次復(fù)位過程(地球?qū)嶒炇?Fig.9 First reset process(in earth labs)
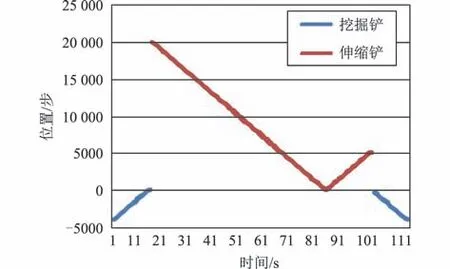
圖10 第二次復(fù)位過程(地球?qū)嶒炇?Fig.10 Second reset process(in earth labs)
針對采樣器其他運動的試驗驗證,對于復(fù)雜運動控制流程,實現(xiàn)了地球站僅發(fā)送1條指令即可最多完成10個動作的自主運動控制,有效提升地球站遙操作指令的效能達4~10倍。
2.3 在軌工作情況
由于采樣器在地面完成復(fù)位流程后隨整器發(fā)射,因此,采樣器在軌工作時,伸縮鏟不是由完全伸出狀態(tài)開始復(fù)位,而是由復(fù)位后的狀態(tài)開始復(fù)位,即從約5100 步開始復(fù)位。2020 年12 月2 日上午,采樣器在月面工作,復(fù)位過程運動曲線如圖11所示。
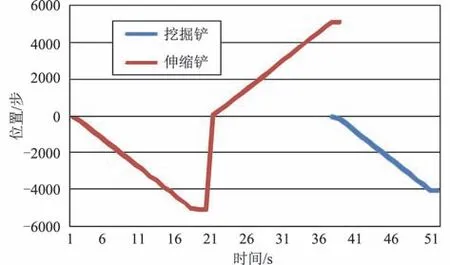
圖11 復(fù)位過程(月面)Fig.11 Reset process(on lunar surface)
從圖11中可以看出,與地面最終復(fù)位狀態(tài)不同,伸縮鏟從-13 步開始復(fù)位,這是因為采樣器在地面最后一次復(fù)位后設(shè)備斷電,軟件記錄的最終步數(shù)清零。此外,由于發(fā)射過程中的巨大振動導(dǎo)致機械結(jié)構(gòu)輕微運動,當采樣器在月面重新加電后,伸縮鏟的步數(shù)變?yōu)椋?3 步,即伸縮鏟的零位丟失,因此復(fù)位時伸縮鏟從-13 步開始運動,當伸縮鏟收回到零位時,軟件完成一次零位標定,隨后伸縮鏟伸出到復(fù)位目標位置,復(fù)位結(jié)束后兩個部件的實際位置見表3。

表3 復(fù)位后兩部件的位置(月面)Table 3 Position of the two components after reset(on lunar surface)
假設(shè)伸縮鏟的零位沒有丟失,對伸縮鏟的初始位置進行平移,那么復(fù)位過程的運動曲線如圖12所示。
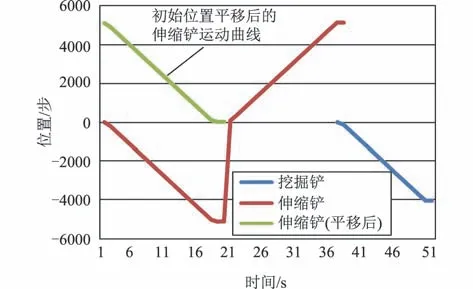
圖12 復(fù)位過程(月面)(伸縮鏟初始位置平移)Fig.12 Reset process(on lunar surface)(translation of initial position)
可以看出圖12的運動曲線與圖9的運動曲線一致,僅伸縮鏟不是從完全伸出狀態(tài)開始收回,其余運動過程一致,故伸縮鏟收回到零位的時間少于地面驗證時的時間,整個復(fù)位過程用時52 s。
隨后采樣器進行采樣,共完成3個動作:①伸縮鏟收回,為挖掘鏟鏟挖做好準備;②挖掘鏟鏟挖,具體動作對應(yīng)挖掘鏟閉合,也就是將月壤挖入采樣器容腔內(nèi);③伸縮鏟伸出,與挖掘鏟形成封閉容腔。一次月壤鏟挖過程兩個運動部件的運動曲線如圖13所示。
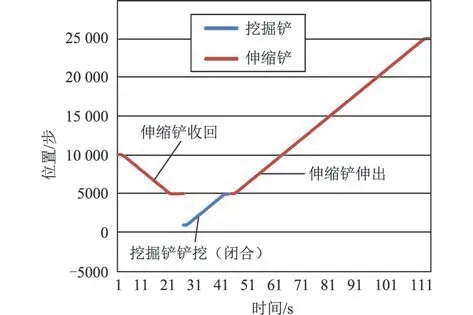
圖13 鏟挖過程(月面)Fig.13 Digging process(on lunar surface)
3 結(jié)束語
本文提出的采樣器智能自主運動控制方法,實現(xiàn)了采樣器多種運動模式的自主控制,軟件可控制采樣器通過一系列運動而完成月表采樣任務(wù);該方法簡化了地球站的遙操作過程,地球站通過上注少量指令即可觸發(fā)采樣器完成多項操作,提升了遙操作指令的效能以及采樣器自主運動能力。經(jīng)過采樣器的試驗驗證以及月面實際采樣,該方法能夠平穩(wěn)的控制采樣器完成采樣任務(wù),采樣器運動連續(xù)可靠。對采樣器在軌采樣過程數(shù)據(jù)進行分析,采樣器完全按照設(shè)計狀態(tài)完成采樣工作,采樣過程與地面試驗結(jié)果一致,表明該方法可行、有效,滿足采樣器在月表的采樣任務(wù)需求。對于后續(xù)同類型任務(wù),可完善軟件設(shè)計,實現(xiàn)采樣器在斷電再加電后運行狀態(tài)的保持,設(shè)計采樣器和機械臂聯(lián)動控制方法,進一步提升軟件的智能化水平。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學(xué)一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03