輸水管道泄漏的探地雷達檢測原理和現象機理分析
2021-08-20 07:13:28郭新蕾鄭飛飛馬朝猛柴端伍崔海濤
水利學報 2021年7期
關鍵詞:檢測
郭新蕾,鄭飛飛,馬朝猛,柴端伍,付 輝,崔海濤
(1.中國水利水電科學研究院流域水循環模擬與調控國家重點實驗室,北京 100038;2.浙江大學建筑工程學院,浙江杭州 310058;3.大連中睿科技發展有限公司,遼寧大連 116002)
1 研究背景
目前我國654 個城市自來水平均漏損率高達15.7%,農村欠發達城市甚至可達到70%,城市供水管網平均產銷差也達17.9%,遠低于我國《水污染防治行動計劃》提出的供水管網漏損率控制在10%以內的要求[1]。開展管道輸水工程及城市供水管網故障預警、監測設備和定位方法的研究,是我國節水型社會建設的迫切需要。國內外對管道漏損、阻塞檢測方法可分為兩類:直接檢測法和間接檢測法[2-4]。前者主要是基于硬件檢測設備,包括水聽器、聽漏儀、分布式光纖光柵、內窺機器人、探地雷達等,后者利用數據采集系統獲得管道參數再通過各類方法,包括壓力波、梯度、實時瞬變流模型等實現對管道的泄漏檢測和定位[5-6]。上述方法各有優缺點,總的來說,漏損檢測正由被動檢漏向主動控漏方向發展。如在檢測設備方面,基于探地雷達、光纖傳感、智能球等新技術是當前的研發重點[1]。
探地雷達檢測是當雷達發射的電磁波在傳播過程中遇到存在電性差異的分界面或物體時會發生反射,根據接收到的電磁波的波形、振幅強度和時間變化等特征可推斷地下介質的空間位置、結構、形態和深度。因其數據獲取快速、低成本、非開挖接觸和效率高等特點,使得基于探地雷達來檢測管道泄漏的技術成為近20年發展起來的一種很有前景、實用性很高的無損檢測方法[7-9],它的本質是通過檢測由泄漏引起局部土體空洞或者土體浸潤造成雷達反射波出現異常,比如雷達反射波圖像中因泄漏引起管道周圍土壤介電常數變化而表征出來的管道深度變化來辨識漏損位置。Stampolidis等[10]利用Pulse-EKKO雷達探測了希臘某城市的地下輸水管道,成功探測出幾種管道類型,并且對漏水區管道的反射模式有了初步認識。Hyun等[11]在實驗室建立了縮尺模型來模擬管道泄漏,通過探地雷達初步識別了泄漏前后雷達圖像的不同特征。Crocco 等[12]最早采用了微波層析的方法對管道泄漏進行了反演分析。David等[13]對探地雷達圖像特征提取的可行性進行了研究,提出了一種基于多智能體系統的特征提取方法,使用密集矩陣處理GPR輸出的預處理圖像,并對初始數據進行分類,實現塑料管道的自動定位,之后他們的研究認為對雷達原始數據的預處理非常重要,這不僅有利于對雷達圖像特征的獲取,還有利于對泄漏類型的自動處理分類[14]。Lai 等[15-16]在實驗室里模擬管道泄漏,繪制了PVC 管道泄漏引起探地雷達圖像信號的不同擾動模式,包括反射和吸收機制,并用于識別PVC管道的現場漏水。此外,一些學者針對泄漏雷達波圖像的辨識,研究應用了不同的算法和濾波器[17-18]對圖像進行處理,幫助檢測和定位地下管線和特定的漏損工況,以實現管道和泄漏特征的可視化,如Silvia J.等[19]采用二階方差濾波器來突出管道和漏水等感興趣的特征,并根據特征提取結果開發了3D模型對泄漏狀況作進一步解釋。
總體來說,目前國內利用探地雷達對土壤含水率探測的研究較多,但對探測管道泄漏的研究還處于起步階段,基本停留在正態模擬,或是對管道本身的探測研究,不足是缺乏儀器設備研發和對漏水的現象、機理與反饋圖像的比對,也沒有相應的試驗平臺手段。國外在這方面的機理研究走在前列,但在以下方面也有較大不足。一是現有針對供水管道模型試驗采用封閉的塑料或者木質的箱體,底板沒有下滲,與現實埋地管道不符,這種情況下雷達反射波真實信號會被底板壁等干擾;二是一些學者的室內實驗比尺小[15-16],埋深淺(如100 mm),這與實際輸水管道埋深差距較大,同時未進行泄漏沙土分層采樣對比試驗;三是正在泄漏和檢測停水泄漏后的狀態區別較大,因為泄漏后隨著時間推移,水會進一步下滲,泄漏后和正在泄漏帶來的雷達反射波差異須區別對待。
鑒于此,本文首先給出了探地雷達檢測泄漏的原理,搭建更接近真實埋地輸水管道狀態的實驗室管道漏損雷達檢測試驗平臺,首次開展系統的輸水管漏水檢測試驗,并詳細對比研究泄漏后、泄漏時等工況下雷達回波圖像的異同,目的是為解析漏水現象和雷達檢測機理提供支撐,并為研發漏損探地雷達檢測設備和軟件提供參考。
2 探地雷達檢測原理及設備
2.1 檢測原理圖1給出了雷達波垂直管道方向掃描時發射、接收電磁波信號的示意圖。可以建立雙程傳播時間t、電磁波在土體介質中的傳播速度v與探地雷達任意位置行程L之間的關系[15]。
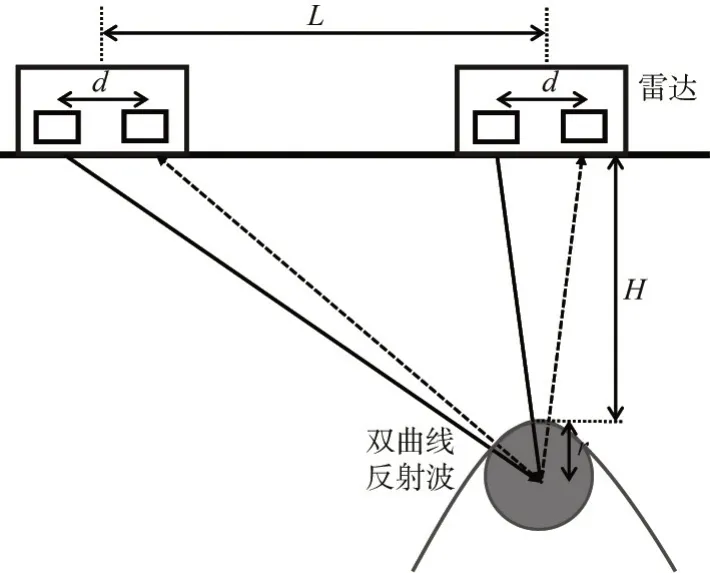
圖1 雷達垂直地下管道掃描時雷達波發射與接收示意

式中:H為管道覆土厚度;r為管道半徑;d為探地雷達系統發射、接收天線之間的距離,這里發射、接收天線耦合集成在一個盒子內,是固定值,d=10 cm。
當L=0,即探地雷達位于管道正上方時,有:

電磁波在土體介質中的傳播速度v可表示為:

式中:c為電磁波在真空中的傳播速度,c=30 cm/ns;ε為介質各層的介電常數,ε=εm/ε0,其中εm為介質介電系數;ε0為空氣介電系數。對于管道探測或者管道泄漏探測來說,H、r和ε為未知量,需要解譯雷達回波圖像并辨識出來。
由上幾式,可得管道埋深為:

需要指出,一般假設管道覆土介質為均質,因此ε值恒定。如雷達波掃描中遇到其它不同介質,由于介質ε值不同,雷達波傳播速度和回波圖像都將受到影響。
當沙土中輸水管道泄漏時,水向外滲漏,浸潤沙土導致土或沙的含水率增大。沙土的含水率θ與其介電常數密切有關,研究表明[20],含水率與介電常數的平方根呈線性相關,即:

隨著沙土介質介電常數的增大,雷達電磁波的反射效果也逐漸增大,相應接收機接收到的能量越大,波幅振幅絕對值隨之增大。
一般的,空氣介電常數為1,沙土在2~6之間,而水的介電常數在81左右,正是因為二者介電常數差異較大,才使得利用雷達反射波圖像中因泄漏引起管道周圍土壤介電常數劇烈變化而表征出來的管道深度變化來辨識漏損位置成為現實。
2.2 便攜式雷達設備本次試驗所使用的便攜式探地雷達是由中國水利水電科學研究院和大連中睿科技發展有限公司聯合研發的管線雷達,主要由雷達發射機、雷達接收機、主控單元、顯控單元、領結天線、雪崩三極管電路等部件組成。特點是:雷達接收機采用等效采樣,信號發射依靠測距輪觸發;經試驗比對確定的探地雷達天線頻率為400 MHz;軟件中對原始雷達數據進行了濾波、背景消除、增益等處理,在后處理算法中采用了冰水情雷達類似的相關性層位追蹤算法[21];開發了利用雷達反射波圖像自動解譯檢測泄漏的新算法。
3 模型試驗平臺
為研究不同材質管道在不同覆蓋層介質下的雷達回波特性和辨識算法,搭建了雷達健康檢測室內試驗平臺。試驗池幾何尺寸為3 m×3 m×1 m,采用混凝土制作。為避免現有模型試驗平臺底板無下滲或者封閉而與真實情況不相符的不足,在試驗槽底部四周每隔0.5 m布設1個排水管,且設置田字型排水墊層,用于水體下滲,盡可能復演真實情況下的滲漏特點。試驗池一側設置一個長為1m的門洞,待檢測鋼管呈L形,直徑100 mm,埋設距離池上緣400 mm,末端封堵并設排氣孔,首端球閥連接市政供水進水口和水表。與以往泄漏孔設置(僅在管道中央鉆直徑為2~4 mm的泄漏孔)不同,本次試驗在管道中部泄漏孔上焊接一小段短管并通過螺絲行程控制多個2 mm的泄漏孔,以實現管道均勻泄漏。
當試驗池埋管覆沙土后,在頂端鋪設厚度1 cm的木板便于雷達測距輪行走。為便于后期數據處理分析,在木板上布設測線,分別沿管道垂直和平行方向每隔15 cm設置一條測線,共計42條,待檢測管道位置處在試驗池中部X11測線上,泄漏點位于管道中部正上方,測線X11和垂直于管線的Y9交點上,如圖2、圖3所示。

圖2 管道泄漏雷達檢測實驗平臺
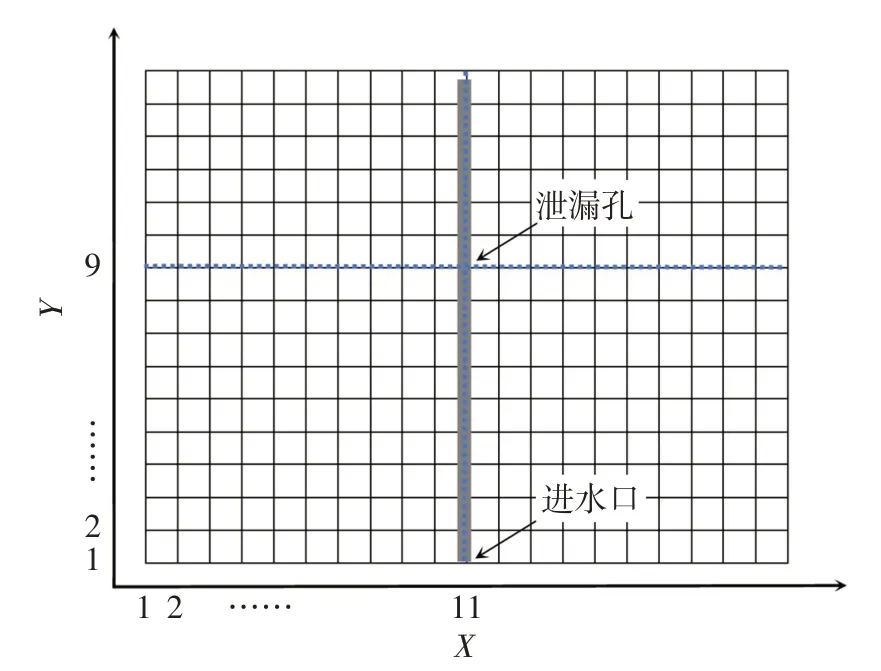
圖3 對應圖2(c)現場試驗雷達檢測測線布置
試驗管道泄漏工況主要分無泄漏、正在泄漏和泄漏后三種,泄漏孔方向分為正朝上和斜向上45°兩種,泄漏量范圍在0.01 L/s至0.1 L/s之間,該供水管道如按照0.5 m/s的經濟流速考慮,上述泄漏量占正常輸水流量的0.3%~3%之間,分別對應微小泄漏和小泄漏工況。分別用管線雷達沿著圖3所示測線,自X1到X20,Y1到Y20進行掃描,相同工況重復2~3次,每條測線采用測距輪觸發測量信號間距為1 cm,即1 cm為一個測量道號,該道號內雷達發射機垂直向下發射電磁波,在有效探測深度范圍內均勻分布1024個采樣點,采樣間隔為49 ps,相應總時窗約50 ns。每個采樣點記錄因電磁波能量的不同而引起的振幅值的不同,當電磁波被介質吸收或者反射較小時,相應波的振幅也較小,反之亦然。每次行程完畢后某測線全部數據經過增益調節、背景消除、零位校正等系列處理,將呈現出完整的回波圖像。需要說明的是,試驗中上述數據的處理閾值僅需調整一次即可。試驗時同步觀測記錄試驗池下方排水孔排水情況。
4 現象與機理分析
4.1 無泄漏管道回波試驗發現,當管道充水無泄漏時,無論泄漏孔朝上還是斜向上45°方向,干沙狀態下典型測線的雷達回波基本一致,典型測線的雷達回波畸變規律一致,如圖4所示。
圖中橫坐標代表的是雷達發射、接收機行程距離L(單位為m,其中L=100x道號),縱坐標表示雷達波的雙程傳播時間t(單位ns)。測線Y9垂直于管道走向,圖4回波呈現雙曲線圖像,這也是垂直管道走向探地雷達標準回波形態。由圖可知,雷達離實際管道位置越近,雙程傳播時間也越短,圖中雙曲線的頂點離管道實際位置最近。而在平行管道走向方向探測,呈現的雷達回波圖像是一條平行線,反映出整個探測行程范圍內探測介質的介電常數保持一致,說明管道埋深也一致,如圖4(b)所示。用不同顏色代表不同波振幅強度等級,可繪出平面距離和深度方向采樣點處的雷達波振幅圖,其特征雙曲線或直線圖像亦可清晰看到。這表明,利用研制的探地雷達可以很快速的識別出管道及其走向。
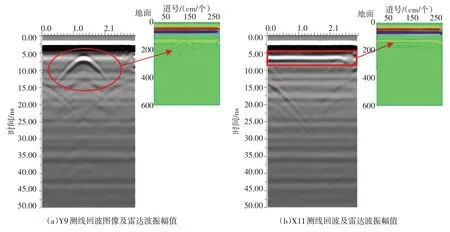
圖4 典型測線雷達回波圖像及波振幅
4.2 有泄漏管道回波選取泄漏孔垂直朝上,微小泄漏量0.01 L/s、0.02 L/s 工況為例進行說明,泄漏時長分別為10 min、45 min。試驗發現,泄漏后試驗池泄漏孔附近沙的狀態基本呈圓形,最終泄漏孔上方形成一個直徑約10 cm 的滲透孔,深度在5 cm 左右,僅出現在表面,并未貫穿到管道漏口位置。滲透孔上下直徑接近,底部逐漸收口。滲透孔出現且管道處于正在泄漏狀態時,孔內充滿水,而當泄漏停止時,水也隨之向下滲入。試驗表明,管道泄漏時(即正在泄漏)和泄漏后(泄漏一段時間后停水)的現象明顯不同,對應沙內含水率(聚集存水或浸潤沙土)也不同。且不同泄漏量和泄漏時間,試驗池內埋深方向各層沙土浸潤面積不同,這也導致各層的狀態和含水率不同,如圖5所示。但管道泄漏后,浸潤變濕的沙相比干沙介電常數明顯增大,由式(2)-(4),雷達波波速減小,走時增大,反映在圖像上雷達回波下移。隨著含水率的進一步增大,濕沙區域變大,雷達回波進一步下移。如果管道正在泄漏,聚集水體介電常數更大,直接導致該處雷達波形態劇烈變化。因此,有必要針對泄漏后和泄漏時兩種現象進行分析。
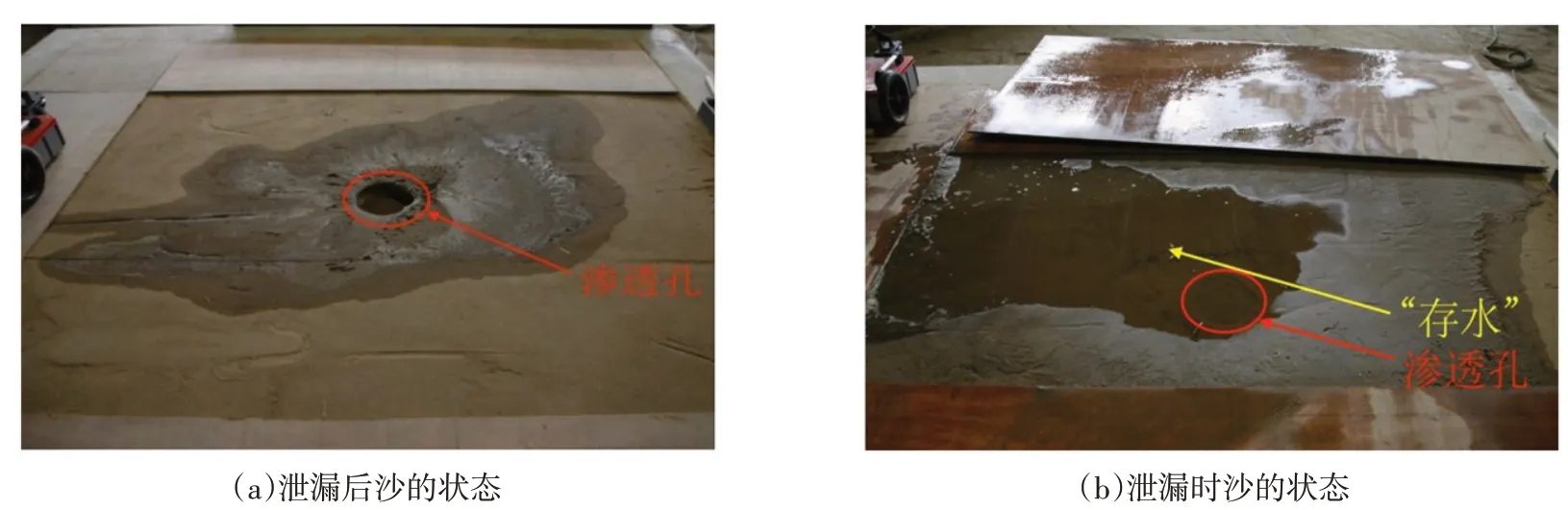
圖5 微小泄漏后、泄漏時試驗池內沙的狀態對比
4.3 泄漏后管道雷達回波圖6給出的是微小泄漏量0.01 L/s 工況下不同Y測線上雷達回波對比圖。由圖可較為清晰的看到泄漏后的管道雷達回波(灰度圖像,類似于圖4(a)),但是不同Y測線回波圖像呈現一定的扭曲變形。以Y9測線為界,距管道相同距離的測線雷達回波呈現類似圖像形態,測線Y2—Y4、Y14—Y16類似,可清晰觀測到管道回波,而離實際管道位置較近的Y5—Y7、Y11—Y13較為模糊,最近的Y8—Y10又變得清晰,雙曲線頂點即為管線位置。此外,當接近水飽和即含水率很高時,由于水的介電常數突增,導致雙曲線波形整體下移,如圖中Y7—Y11測線雙曲線位置。干沙狀態雷達波雙程走時4.9 ns左右,濕沙狀態走時11 ns左右,即Y9測線雙曲線頂點。根據實驗現象再次確認,當管道處于強烈的水飽和處(Y8—Y10)和非飽和濕潤鋒處(Y2—Y4),濕潤鋒即濕沙與干沙分界面,水對雷達波的擾動機制是反射模式,信號強烈;當管道處于濕潤鋒和強烈的水飽和之間時,水對雷達波的擾動機制是吸收模式機制,此時雷達波能量會部分被吸收和削弱,呈現模糊狀態。此外,當回波經過管道泄漏孔附近濕沙時也呈現一定的雜波圖像。根據上述公式和波形辨識結果,可計算出該組工況下不同Y 測線平均的介電常數值,從Y2 到Y17 依次為4、4、4、5、16、20、23、24、23、19、17、5、4、4、4、4。也就是說,當沙土平均介電常數在5到20范圍時,水對雷達波的擾動處于吸收模式,當該值大于20時,處于反射模式,而當該值小于5時,此時沙土基本為干沙。重復7組實驗且不同泄漏量情況下,仍可得出類似圖像和結論。
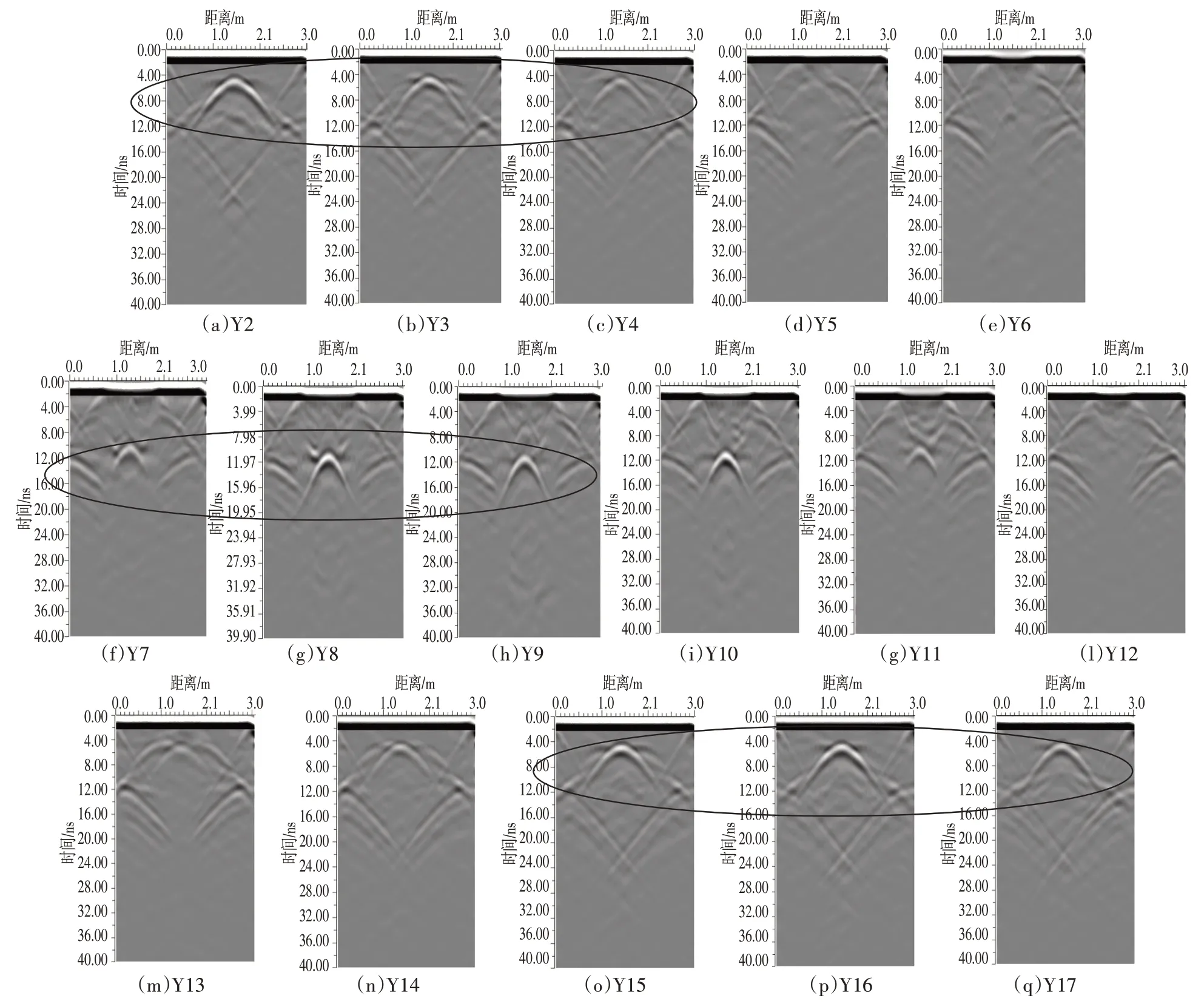
圖6 微小泄量泄漏后Y測線雷達回波圖像
圖7給出的是微小泄漏量0.01 L/s工況不同泄漏時間(分別為90 min兩組、240 min 兩組)X11測線上雷達回波對比圖。相比無泄漏的直線雷達回波圖像,濕沙狀態下的雷達回波呈現明顯的“V”字型,且距離實際泄漏位置越近,波形越向下凸,主要原因仍然是泄漏孔附近沙的含水率最大,最為飽和,平均介電常數也最大,由此引起雷達波雙程走時變長。X11測線離實際泄漏較遠的位置,雷達回波模糊是因為濕潤鋒和水飽和區之間,水對雷達回波是吸收模式。由以上現象發現,可根據X、Y測線雷達回波圖像表現出的畸變點形態對應的測線位置和雙程走時時間,進行泄漏孔位置的判斷,即X11測線與Y9測線的交點即為泄漏孔位置。
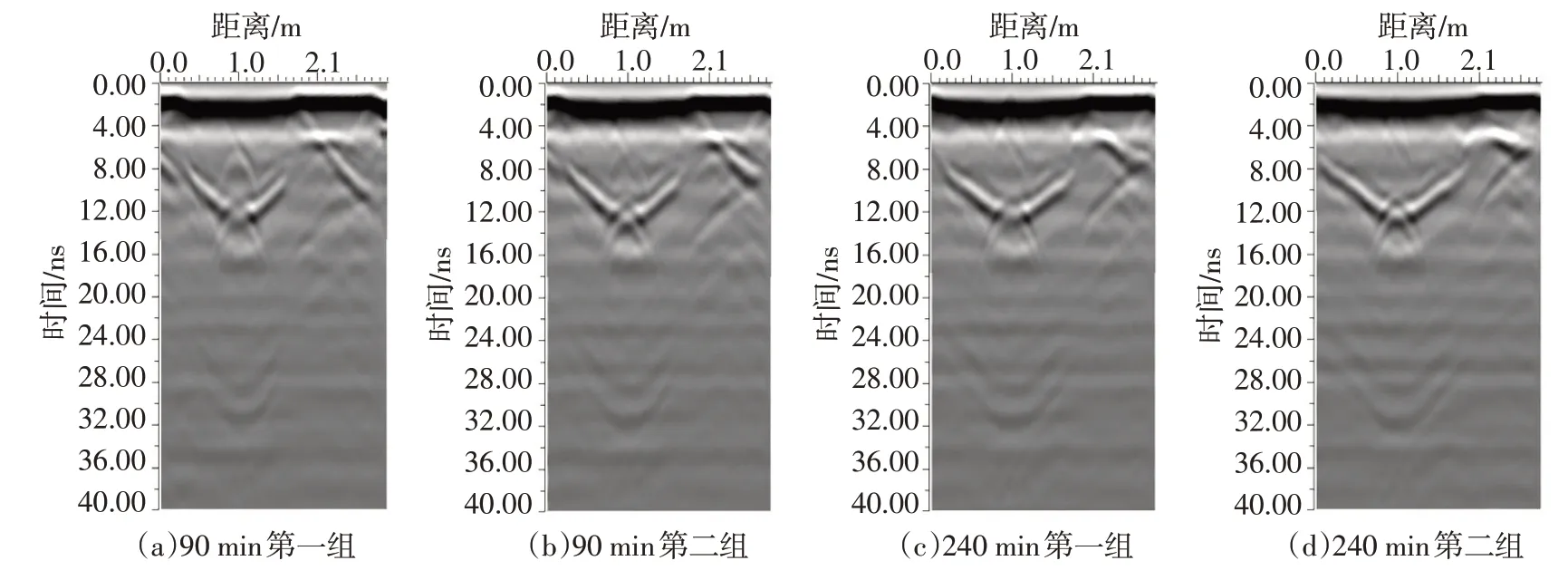
圖7 微小泄量不同泄漏時間后X11測線雷達回波圖像
4.4 泄漏時管道雷達回波限于篇幅,這里以X11、Y9測線上的雷達回波圖像差異進行說明。在泄漏后工況完成后繼續按原輸水量供水,然后開展泄漏時數據的采集,由此形成泄漏后、泄漏時回波的對比。圖8給出的是泄漏后和泄漏時典型測線X11、Y9 雷達回波對比,每組又分為不同總泄量(2.36 m3、2.69 m3)兩種工況重復試驗。通過上下雷達回波(圖8豎向對比,圖8(a1)泄漏后對應圖8(a2)泄漏時圖像,其余類似)的對比,發現泄漏后和泄漏時管道的回波圖像畸變特征總體基本一致,唯一區別是圖中泄漏時的雷達回波都出現了一個類似于箭頭的回波,不妨命名為“箭形回波”,而4個泄漏后的雷達回波并未發現這種回波。原因是,當管道正泄漏時,泄漏孔附近的沙被沖出,伴隨水的持續泄漏,孔口上方一直處于“存水”狀態,而泄漏后工況,存水下滲到附近沙土中。因“存水”現象出現,導致該點的平均介電常數接近水的介電常數80,這表明箭形回波是管道上部持續存水對雷達波的響應。而附近濕沙平均介電常數在20到30之間,因此泄漏后工況不會出現。此外,對比分析了泄漏時工況下所有Y測線的雷達回波圖像,也只在Y9測線發現該箭形回波。大量重復試驗證明,箭形回波是泄漏孔位置附近回波的典型特征,也是泄漏時和泄漏后雷達圖像最明顯的區別。如要在管道不停水情況下檢測泄漏,應重點分析泄漏時的雷達回波特征。
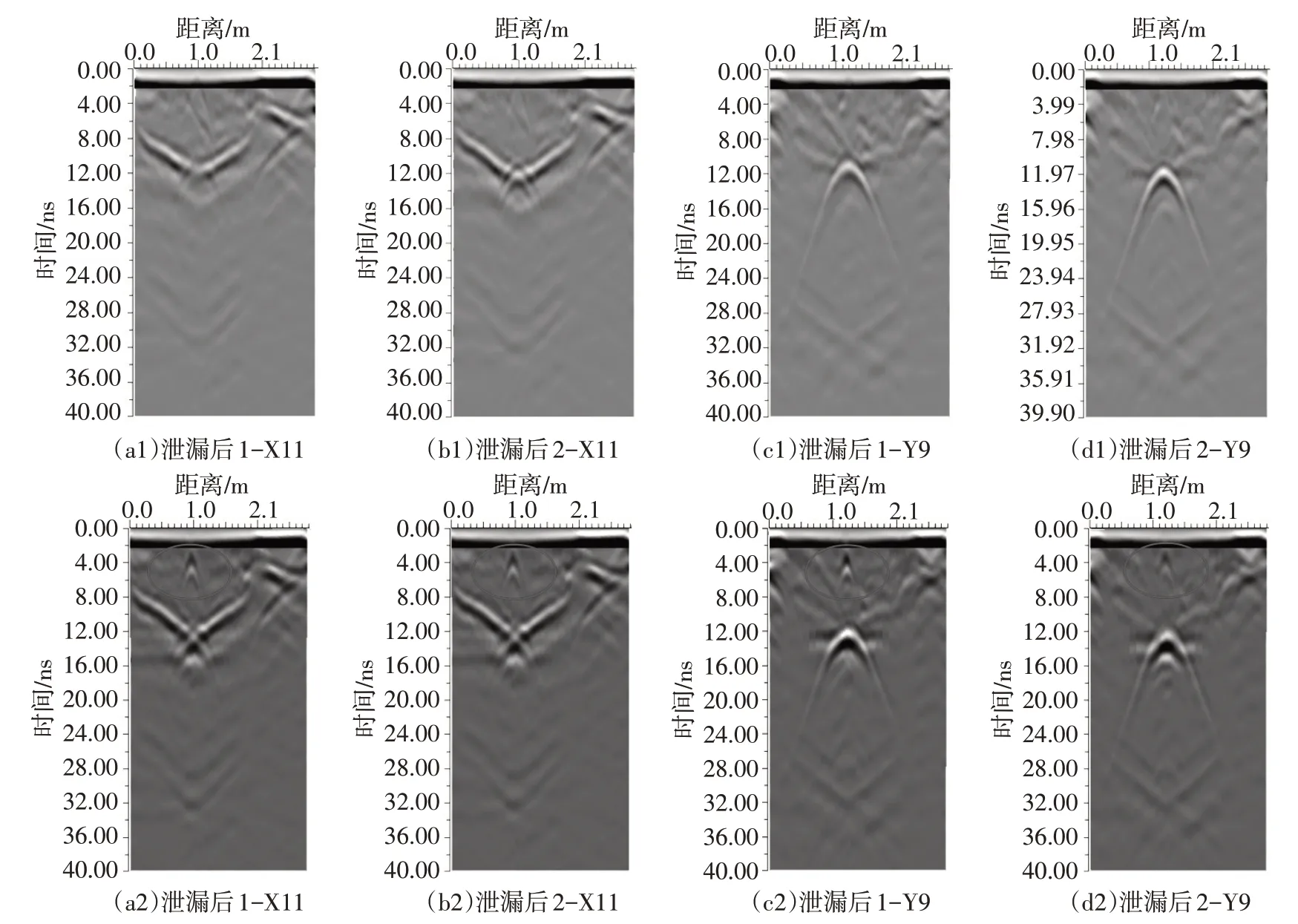
圖8 小泄漏量泄漏后與泄漏時典型測線雷達回波對比
為進一步分析泄漏時不同泄漏流量的雷達回波,開展了小泄漏流量0.1 L/s的五組工況試驗,泄漏總時間從18 min到85 min左右不等,同時也對比了泄漏后工況。圖9、10給出的是小泄漏量泄漏后與泄漏時X11、Y9測線雷達回波對比。由圖可知,同微小泄漏流量工況相比,典型測線雷達回波畸變規律基本一致,但呈現的畸變特征要更加清晰。不同的是,隨著泄漏水量的不斷增大,泄漏孔附近強烈水飽和的區域不斷擴大,X11測線雷達回波呈現的“V”字型逐漸變為梯形,隨著泄漏水量的繼續增大,管道都處于強烈的水飽和范圍內,對應回波波形變為直線。若管道比較長,小泄量工況管道的回波將會表現為梯形。更為重要的是,五組工況下除了有箭形回波,在管道下部還出現了明顯的回波,不妨命名為“孔下回波”,如圖9、圖10中藍色示意。原因是,當管道正在泄漏且泄量較大時,管道下方的水來不及滲入周圍沙土中,該部分存水導致管下方介電常數顯著增大出現回波亮斑,而泄漏后工況停水后泄漏水已經逐漸下滲,總體浸潤后濕沙介電常數不大,則不會出現該孔下回波亮斑。X11測線的第4、5組工況也出現了孔下回波,主要原因是泄漏停水后管道內的存水還沒完全經過小孔下滲下去。小泄漏量泄漏后與泄漏時Y9測線雷達回波對比也表明,正在泄漏工況均在管道下方出現孔下回波亮斑,如圖10所示。
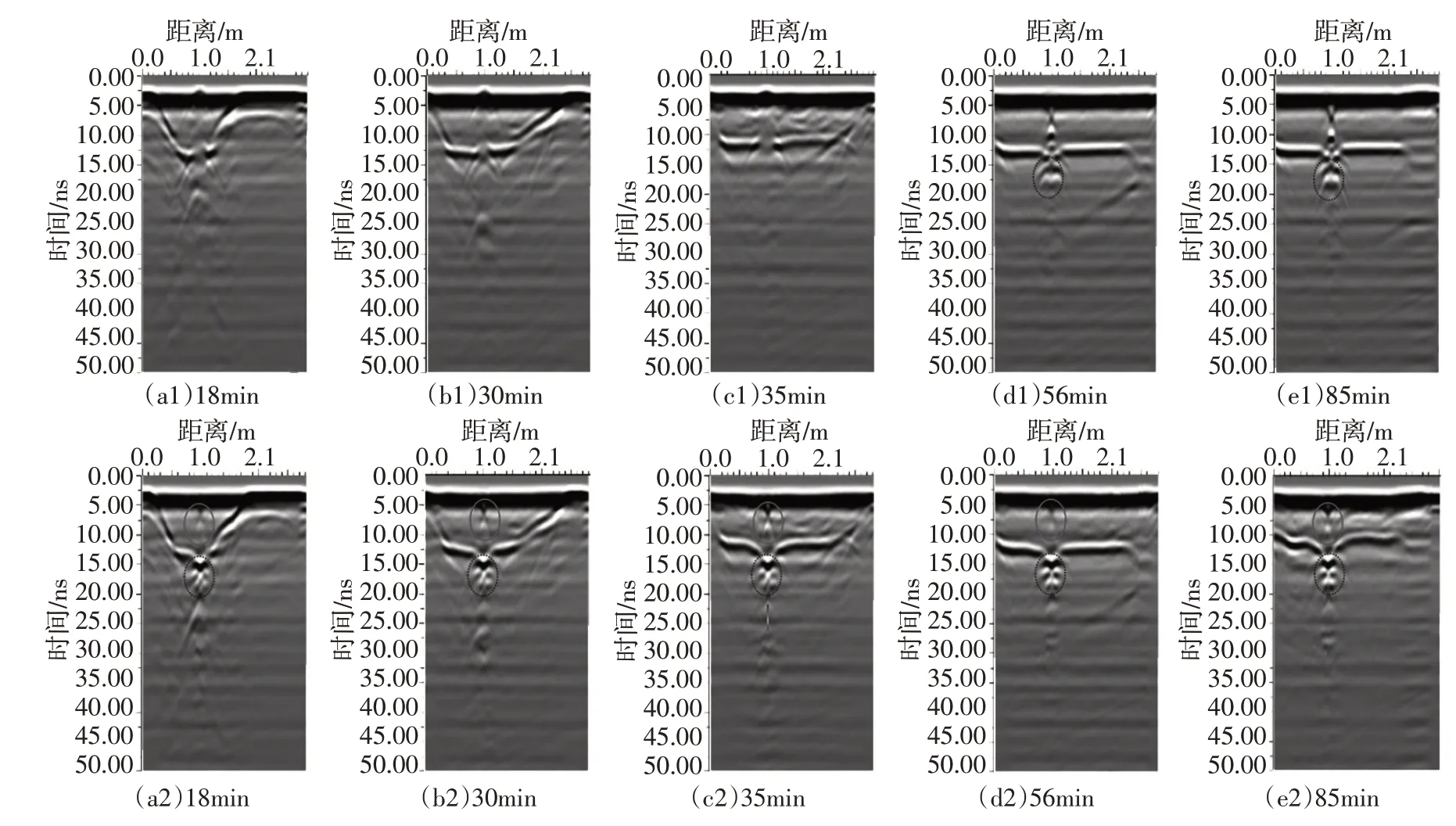
圖9 小泄漏量泄漏后與泄漏時X11測線雷達回波對比(圖中a1—e1為泄漏后工況,依次泄漏時間增大;a2—e2為泄漏時工況,其中泄漏時是泄漏后停水后再次開閥后量測)
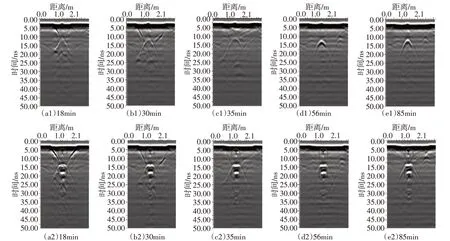
圖10 小泄漏量泄漏后與泄漏時Y9測線雷達回波對比(工況同圖8)
為研究管道同一斷面不同位置發生泄漏時是否也會出現上述現象,設置管道旋轉工況,即圖2(b)中管道逆時針旋轉45°,其它條件不變仍按小泄漏重復上述實驗,大量試驗也得出同一重要結論,即“箭形回波”和“孔下回波”是區分管道泄漏時和泄漏后的雷達回波關鍵典型特征,尤其較為清晰的孔下回波亮斑是正在發生小泄漏的典型圖像特征。因此,對于管道不停水泄漏的檢測,如能從圖像上辨識出“箭形回波”和“孔下回波”,即可實現泄漏的定位。此外,典型測線呈現的箭形回波和孔下回波特征除了在雷達反射圖像上可以清晰辨識,從二者反映的波振幅值來看,這些典型特征均位于某一位置(或道號)波振幅值的絕對值增大區域,尤其是孔下回波,如圖11所示。換句話說,針對這兩個異常信息的檢測,除了可以直接從圖像上自動辨識,也可考慮通過設置波振幅值超出某一區間閾值來實現管道上述異常信息的識別與報警。
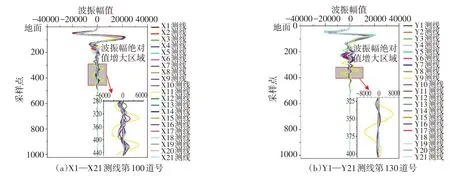
圖11 泄漏時測線典型道號所有采樣點處波振幅值變化曲線
4.5 泄漏范圍識別對比為研究驗證本探地雷達檢測管道泄漏的有效性并反演泄漏范圍,泄漏試驗后開挖了試驗平臺內不同厚度的沙土,一方面測量開挖后每層沙土平面內濕沙輪廓尺寸,一方面將檢測中所有Y測線對應上述每層沙土平面內采樣點的回波振幅取出,并按照不同振幅強度等級對應不同顏色給出不同開挖深度下沙土平面的波振幅分布,藍色表示干沙土區域,如圖12所示,其開挖深度H的間隔為7 cm,H=45 cm 表示緊貼管道底部那層沙土。由圖可知,試驗槽表面處的濕沙土輪廓大致呈圓形,干沙土區域介質的介電常數均勻,探地雷達的接收機接收到的回波振幅值處于同一強度等級之內。濕沙輪廓線處由于水的浸潤,平均介電常數增大,輪廓線處的波振幅值明顯變大,且越靠近管道泄漏孔處的沙土含水率越大,相應波振幅值也發生改變。如圖12(b),開挖至14 cm 處,濕沙土的輪廓大致呈圓形,沿垂直于Y測線方向測量其直徑為212 cm。試驗平臺沙土開挖至14 cm處的波振幅值圖對應所有Y測線內第100道號測量值。第Y9條測線與第Y220條測線處,由探地雷達接收到的波振幅值變化幅度較大,說明此處介質介電常數有所變化,為濕沙輪廓線,測量反演的濕沙范圍為211 cm,與實測距離212 cm 很接近。當開挖至45 cm 時,試驗平臺內沙土全部為濕沙土,該平面上波振幅值在整個波振幅值曲線中未產生較大幅度變化,說明此處介質的介電常數基本一致。
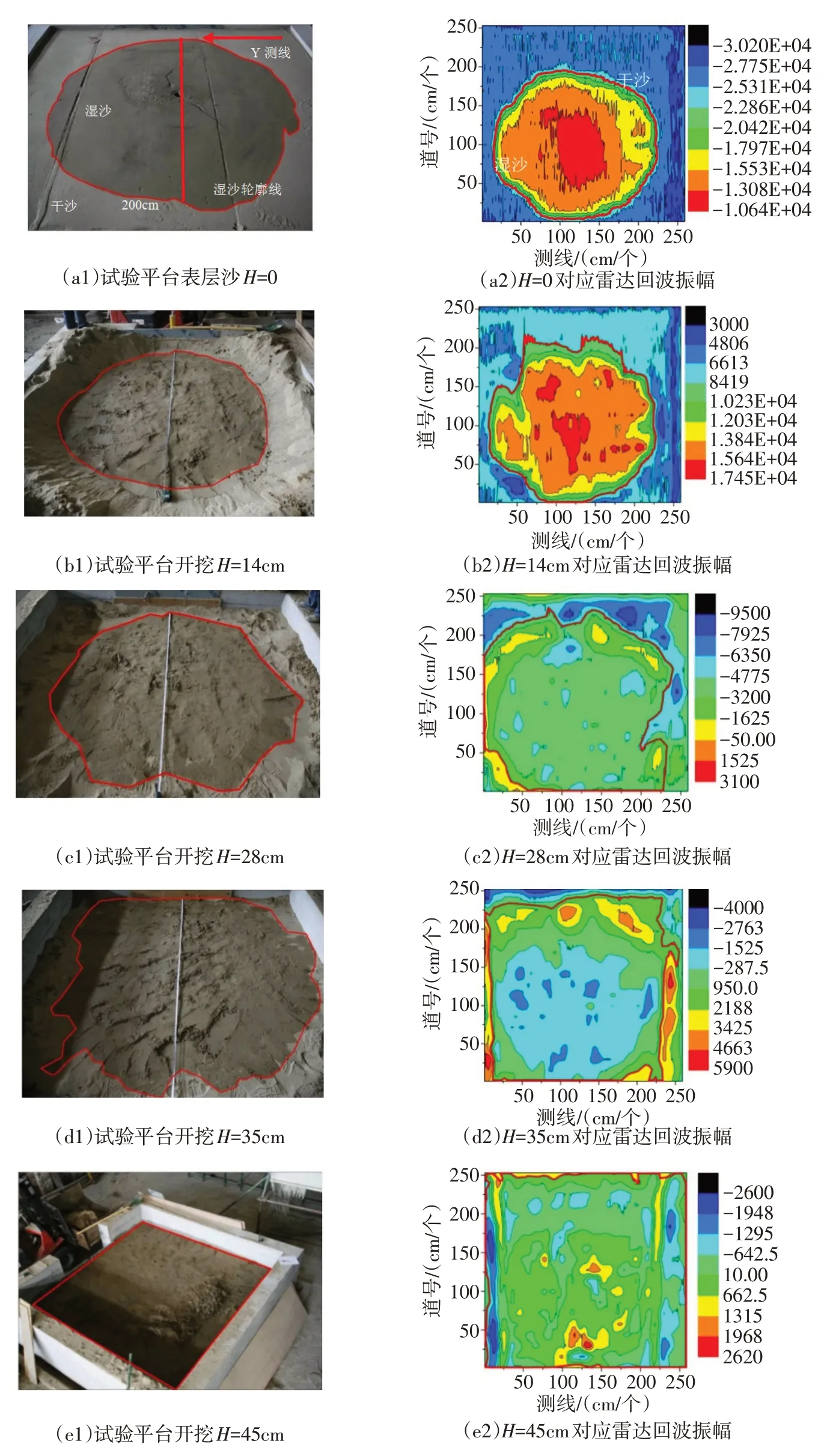
圖12 不同開挖深度下沙土干濕分界及對應平面上Y測線回波振幅值分布
此外,還對試驗中管道上方泄漏空腔的形成原因和與雷達波的波振幅圖進行了測量比對,證實泄漏空腔是由于泄漏水體不斷淘刷泄漏孔附近沙土逐步形成,波振幅值圖中可看出明顯圓形分界,反演泄漏空腔直徑29 cm 與實際測量吻合較好。總體來看,試驗中開挖后沙土干濕輪廓與雷達波振幅值的反演吻合度較高,進一步驗證了利用探地雷達檢測輸水管泄漏的可行性和有效性。
上述技術已初步在哈爾濱、大連等地實際管網漏損檢測中應用,管線檢出率95%以上,且成功找出十余個漏水點,關于實地檢測試驗的分析結果將另撰文詳述。
5 結論
本文研究了輸水管道泄漏的探地雷達檢測技術,通過開展系統漏水檢測試驗分析了泄漏后、泄漏時等工況下雷達回波圖像的異同,得到以下認識和結論:
(1)利用探地雷達檢測充滿水的輸水管道,干沙狀態下典型測線的雷達回波基本一致,典型測線的雷達回波規律一致,呈現探地雷達標準回波形態,即平行管道測線回波呈直線,垂直管道測線回波呈雙曲線,且圖像中雙曲線的頂點離管道實際位置最近。
(2)管道泄漏后,濕沙狀態下平行管道測線雷達回波下移,呈明顯的“V”字型,隨著泄漏水量不斷增大,管道雷達回波進一步變化。垂直方向測線的回波雙曲線形態更加陡峭,斜率更大,該畸變規律有利于鎖定大致泄漏范圍。通過試驗證實了雷達發射回波清晰程度跟泄漏水對雷達波的兩種擾動模式有關。
(3)大量重復試驗發現重要結論,“箭形回波”和“孔下回波”是區分管道泄漏時和泄漏后的雷達回波關鍵典型特征,尤其較為清晰的孔下回波亮斑是正在發生小泄漏的典型圖像特征,該區域也是波振幅值絕對值增大區域,且具有規律性。對于管道不停水泄漏的檢測,如能辨識出箭形回波和孔下回波,即可實現泄漏的定位。
(4)不同開挖深度下的沙土干濕輪廓與雷達波振幅值的反演吻合度較高,驗證了利用探地雷達檢測輸水管泄漏的可行性和有效性。
需要指出,目前是均質介質檢測鋼管的泄漏,而真實混凝土路面下方存在鋼筋、石塊等介質,會對雷達回波產生一定干擾,如何克制干擾辨識真實信號有待進一步研究。下一步也將進一步完善通過在雷達反射波圖像中設置波振幅值閾值來實現泄漏的自動檢測。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
