基于IMDEKF的SoC-SoH聯(lián)合估計
2021-08-19 02:26:00陸代強黃日光陳永鑒隆茂田
實驗室研究與探索 2021年7期
海 濤, 范 恒, 陸代強, 黃日光,2, 陳永鑒, 隆茂田
(1.廣西大學電氣工程學院,南寧530004;2.南寧學院,南寧530200)
0 引 言
電池荷電狀態(tài)(State of Charge,SoC)與電池健康狀態(tài)(State of Health,SoH)是用來描述電池性能及狀態(tài)的兩個關(guān)鍵參變量,對二者進行準確估算可延長電池使用壽命。目前國內(nèi)對SoC或SoH進行單一估計方法研究較多[1-2],二者狀態(tài)存在緊密聯(lián)系,如單一估計SoC時,若SoH已產(chǎn)生變化,會造成估計誤差,不準確的SoC難以對SoH進行有效修正。若對二者狀態(tài)進行聯(lián)合估計,估計過程中讓二者互相循環(huán)修正,修正結(jié)束后同時輸出估計值,有利于提高狀態(tài)估算準確度[3]。
對電池雙狀態(tài)的聯(lián)合估算已有一些探討,沈佳妮等[4]分析電池SoC-SoH的各類模型的估算方法,指出電池狀態(tài)估計依賴于可靠的電池模型及算法,且模型算法均應(yīng)在保證估算精度的同時進行簡化;戴海峰等[5]嘗試采用雙卡爾曼濾波估計電池SoC與SoH,取得良好效果,證明了雙卡爾曼濾波聯(lián)合估計SoC-SoH的有效性;郭向偉等[6]估算SoH反求可用容量,將其代入安時積分法矯正荷電狀態(tài)估計值,減小估算累積誤差;汪秋婷等[7-8]基于電化學-電路等效模型,前后提出滑動窗自適應(yīng)濾波算法及Dual-UKF算法以實現(xiàn)SoC-SoH的聯(lián)合估計;鄭貴林等[9]通過檢測蓄電池內(nèi)阻及端電壓,設(shè)計自校準的智能檢測系統(tǒng),SoC-SoH估計準確度分別可達91.9%、96.3%;程澤等[10]改進傳統(tǒng)平方根無跡卡爾曼濾波,加入自適應(yīng)思想,減少了聯(lián)合估計誤差;印學浩等[11]考慮SoH退化對SoC的影響,提出了基于無跡粒子濾波的多時間尺度估計方法,并取得良好估計效果。以上研究大部分未采用雙卡爾曼濾波類算法,采用此類算法的也未考慮噪聲對電池參變量估計的消極影響。
本文采用雙擴展卡爾曼濾波算法(DEKF)來進行聯(lián)合估計研究,考慮電池SoC與SoH狀態(tài)變化差異,對兩狀態(tài)的取樣時間進行差異化處理,實現(xiàn)多尺度優(yōu)化,在此基礎(chǔ)上加入噪聲統(tǒng)計估值器以削弱噪聲對估計的影響,最后對算法進行仿真測試,并給出了仿真結(jié)果。
1 電池狀態(tài)模型
1.1 等效電路模型的建立
選取恰當?shù)碾姵啬P陀兄趯﹄姵貭顟B(tài)參數(shù)進行估計。HU等[12]列出了12種常用電池ECM模型進行比較研究,分析等效電路特點,證明該電路可較為精準地表現(xiàn)電池特性,該模型階數(shù)低,電路復雜度較低,易于工程實現(xiàn),將其作為本文的聯(lián)合估計電池模型。模型如圖1所示,模型中Rs為等效內(nèi)阻,電池的極化現(xiàn)象通過極化電容Cp與極化內(nèi)阻Rp并聯(lián)加以表征,i為充放電電流,放電時其為正值,E和u分別表示電動勢及端電壓。模型的參數(shù)值與電池工作條件與充放電電流等因素相關(guān),可通過實驗進行參數(shù)辨識來求取。
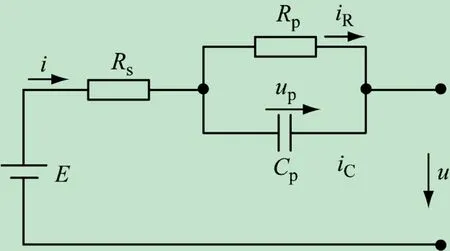
圖1 等效電路模型
為定義電池SoC,應(yīng)用安時積分法計算時間t到t0的大小可得:

式中:η為庫倫放電比例系數(shù),與放電溫度、放電速度等相關(guān);i(t)、Q分別為放電電流及電池可用容量。
定義電池SoH為電池實際可用容量與電池標稱容量之比:

式中,Qcap為實際可用容量估計值。
1.2 參數(shù)辨識
測試采用額定電壓3.6V,標稱容量為2.6A·h的鋰電池作為實驗對象,采用BTS4000儀器進行測試,測試現(xiàn)場如圖2所示。

圖2 測試現(xiàn)場
1.2.1 UOC-SoC趨勢
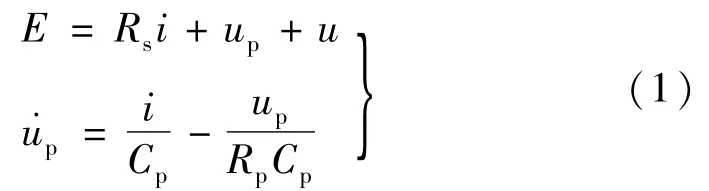
UOC-SoC測試采用Abu-Sharkh等[13]所提方法對單體電池開路電壓(UOC)進行辨識,得出UOC-SoC關(guān)系。具體做法是新出廠電池滿充電后,在室溫27℃條件下,以0.3C恒流間歇性放電,放電周期為20min,每次放電結(jié)束擱置1h測開路電壓,直至完全將電池放電。對數(shù)據(jù)進行擬合,發(fā)現(xiàn)若采用4階多項式,能較好體現(xiàn)二者關(guān)系,如圖3所示為擬合所得UOC-SoC趨勢線,每個數(shù)據(jù)點為辨識所得開路電壓參數(shù),4階多項式各階系數(shù)見表1。
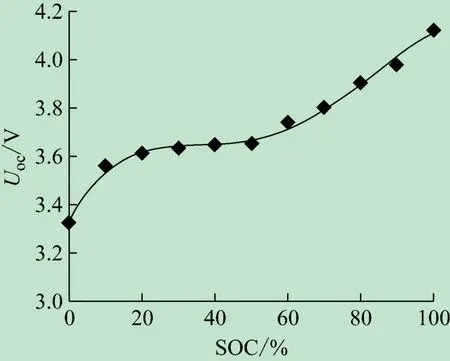
圖3 開路電壓UOC與SoC關(guān)系曲線

表1 UOC-SOV多項式系數(shù)
1.2.2 模型參數(shù)辨識
通過HPPC試驗,可獲得不同SoC下的電壓響應(yīng),根據(jù)響應(yīng)可求得電池模型的各項參數(shù)。如圖4所示為一次脈沖充放電的響應(yīng)。其中藍色為電流放電曲線,紅色為電壓放電曲線。
圖4 一次脈沖充放電曲線
據(jù)圖4充放電曲線,可計算電池模型參數(shù)Rs和Rp,進一步可計算極化電容Cp,各參數(shù)計算方法如下:
式中:i為加載電流;τ 為時間常數(shù)[14]。
設(shè)定測試放電電流為0.3C(C為放電倍率,表示放電快慢的一種度量),每隔10%的SoC執(zhí)行一次HPPC以獲得響應(yīng)曲線,并據(jù)式(4)求得模型參數(shù)Rs、Rp與Cp。最后對實驗數(shù)據(jù)進行多項式擬合,發(fā)現(xiàn)6階多項式能較好體現(xiàn)參數(shù)與SoC關(guān)系,如圖5所示,圖中各點為所求得模型參數(shù)數(shù)據(jù),曲線為將數(shù)據(jù)擬合所得6階多項式曲線,體現(xiàn)模型各參數(shù)與電池荷電狀態(tài)之間的關(guān)系趨勢,多項式各階系數(shù)見表2。
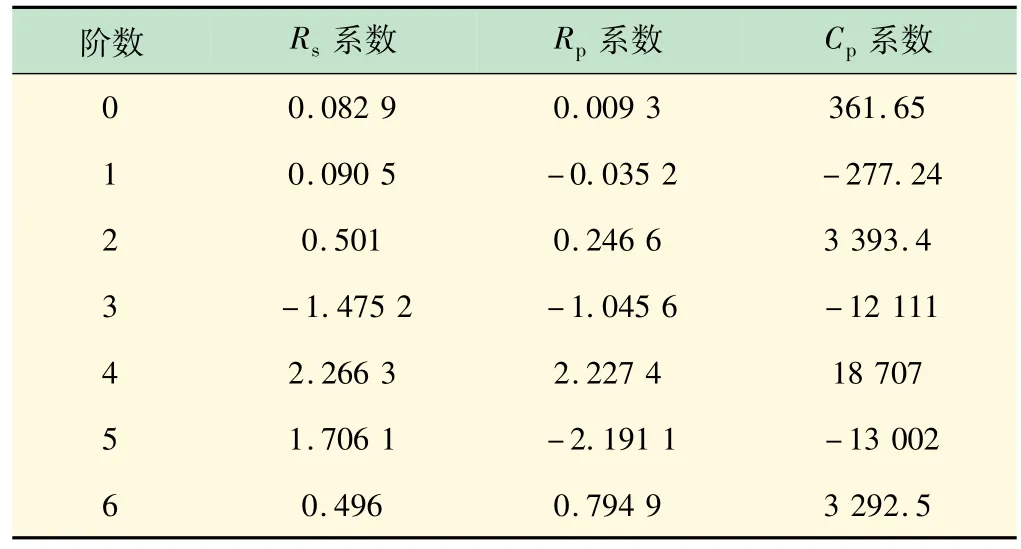
表2 R s、R p、C p的多項式系數(shù)
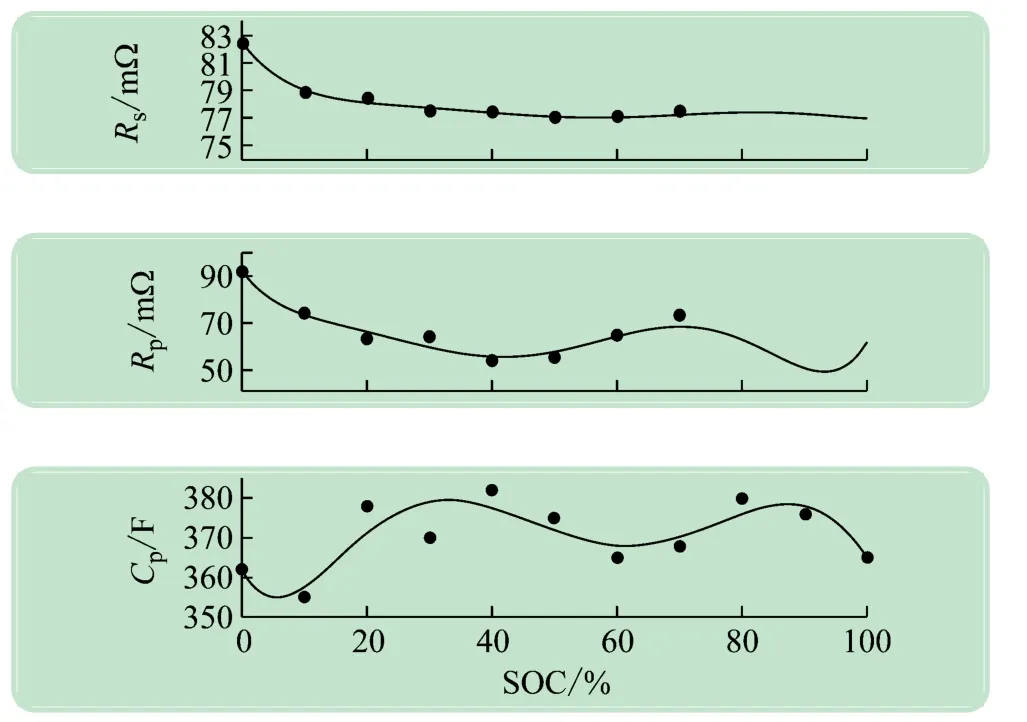
圖5 R s、R p、C p參數(shù)與SoC的關(guān)系
2 雙擴展卡爾曼濾波算法改進
2.1 多尺度優(yōu)化
卡爾曼濾波通過觀測線性系統(tǒng)輸入、輸出數(shù)據(jù)并不斷進行最優(yōu)估計。而實際跟蹤目標多為非線性的,如鋰電池的Thevenin等效模型,為對非線性系統(tǒng)進行狀態(tài)估計,基于標準卡爾曼濾波進行擴展,利用Taylor展開對非線性系統(tǒng)進行線性化處理,再用卡爾曼濾波框架對信號進行濾波。在單一SoC或SoH的估計研究中,文獻[15-16]已證明EKF算法對電池狀態(tài)的估算有較高準確度。為實現(xiàn)電池SoC-SoH的估計,基于EKF算法并引入雙卡爾曼思想,結(jié)合二者優(yōu)勢提出DEKF聯(lián)合估算方法,交替使用EKF算法估計系統(tǒng)狀態(tài)及模型參數(shù)。
圖6所示為DEKF流程,其由微觀EKF和宏觀EKF組成,其中微觀EKF實現(xiàn)系統(tǒng)狀態(tài)估計,進行SoC預測,宏觀EKF實現(xiàn)對模型參數(shù)與電池實際可用容量的估計,DEKF算法以測得的電池負載電流、端電壓數(shù)據(jù)作為輸入值,與各自最新的預測估算值進行比較分析,不斷進行迭代修正來實現(xiàn)SoC-SoH的聯(lián)合估計。
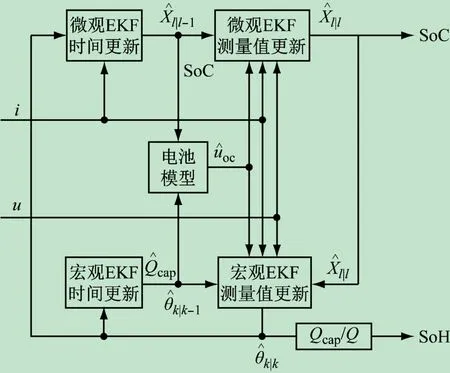
圖6 DEKF算法流程示意圖
考慮電池參數(shù)變化速度相對于電池狀態(tài)的變化速度較為緩慢,若設(shè)置微觀EKF與宏觀EKF為相同取樣時間,算法運算量較大。為降低運算量,對算法進行多尺度優(yōu)化,優(yōu)化的多尺度雙卡爾曼濾波(Multi-Scale DEKF,MDEKF)算法流程圖如圖7所示。MDEKF根據(jù)跟蹤參數(shù)的變化特性引入差異取樣環(huán)節(jié),設(shè)定宏觀EKF取樣時間為微觀EKF取樣時間的L倍,在優(yōu)化后的估計過程中,當二者取樣時間尚未同步時,不間斷循環(huán)預測校正電池組SoC,直至二者取樣同步后,宏觀EKF參數(shù)更新。
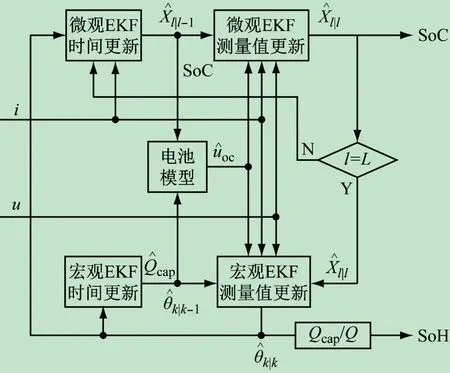
圖7 MDEKF算法流程示意圖
基于優(yōu)化后算法,將式(1)、式(2)離散化可得:
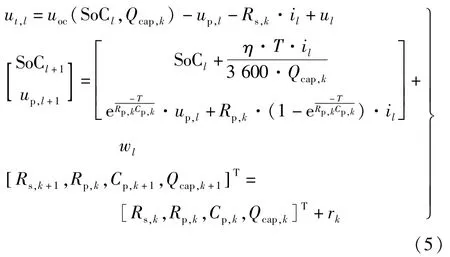
式中:下標k、l分別為宏觀EKF和微觀EKF的第k個與第l個取樣點;wl、rk分別為微觀EKF和宏觀EKF的過程噪聲;vl為微觀EKF的測量噪聲。對式(5)改寫得方程:
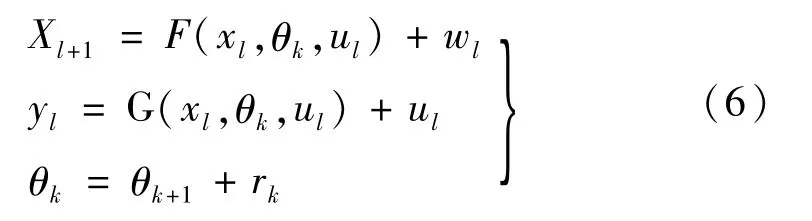
式中:Xl為微觀EKF狀態(tài)分量;θk為宏觀EKF參數(shù)向量,ul、yl分別為負載電壓與端電流。
多尺度估計步驟
步驟1宏觀EKF時間更新,預測模型參數(shù)值:
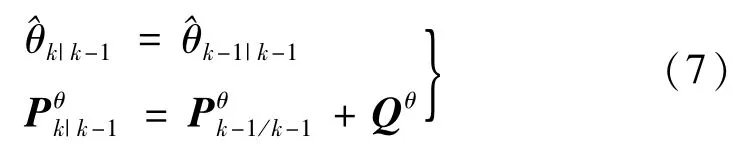
式中,Qθ=E[rrT]為過程噪聲的協(xié)方差矩陣。
步驟2微觀EKF時間更新,對系統(tǒng)狀態(tài)進行預測,當期望狀態(tài)值與平衡點的誤差為0時,完成時間更新:

步驟3計算微觀EKF增益值:

步驟4微觀EKF測量更新,通過增益值與測量誤差值來校正系統(tǒng)狀態(tài):

步驟5判斷宏觀EKF與微觀EKF的取樣時間是否同步,根據(jù)判斷結(jié)果執(zhí)行不同步驟。
步驟6計算宏觀EKF增益值:

步驟7宏觀EKF測量更新,通過卡爾曼增益與測量誤差值對模型參數(shù)進行校準修正:
至此建立了MDEKF算法,若考慮系統(tǒng)噪聲影響,則可對MDEKF進行進一步改進。
2.2 噪聲修正
噪聲會導致算法利用參數(shù)進行狀態(tài)估計時誤差增大,甚至導致輸出發(fā)散,針對狀態(tài)估計過程添加包含遺忘因子的噪聲統(tǒng)計估值器,以在線估計未知噪聲均值和方差,進一步對算法進行優(yōu)化處理:
式中:q、r分別為過程噪聲均值和測量噪聲均值;Q、R分別為過程噪聲和測量噪聲協(xié)方差矩陣;ε為新息;e為遺忘因子,通常0.95≤e≤0.995[17],本文取值0.97。
至此完成了算法改進,建立了改進多尺度雙擴展卡爾曼濾波算法(Improved MDEKF,IMDEKF)。
3 仿真分析
為對算法進行仿真測試,據(jù)圖1所示等效電路,結(jié)合辨識實驗所得模型數(shù)據(jù),利用MapleSim軟件通過串并聯(lián)建立48 V/13 Ah電池組仿真模型,對其編譯轉(zhuǎn)換為S-Function模塊,以便轉(zhuǎn)入Matlab軟件進行分析,結(jié)合算法利用DST電流對模擬電池組放電進行估計測試。
達到測試多尺度優(yōu)化前后的估計效果,設(shè)定DEKF狀態(tài)估計與參數(shù)估計取樣時間均為0.1 s,MDEKF算法的狀態(tài)取樣時間l=0.1 s,參數(shù)取樣時間L=1 s,又設(shè)置模擬電池組SoC=100%,SoH=50%,算法初值為SoC=100%,SoH=50%,將模擬電池組SoC從100%放電至10%,以觀察優(yōu)化前后算法的跟蹤效果。仿真結(jié)果如圖8所示。由圖可見,MDEKF與DEKF相比,二者SoC估計效果無明顯差異,SoH估計方面,DEKF收斂時間稍快于MDEKF,但SoH估計過程由于狀態(tài)更新頻率過快導致存在較大誤差波動,而MDEKF的SoH估計過程較為平穩(wěn),且精準度亦滿足系統(tǒng)要求。
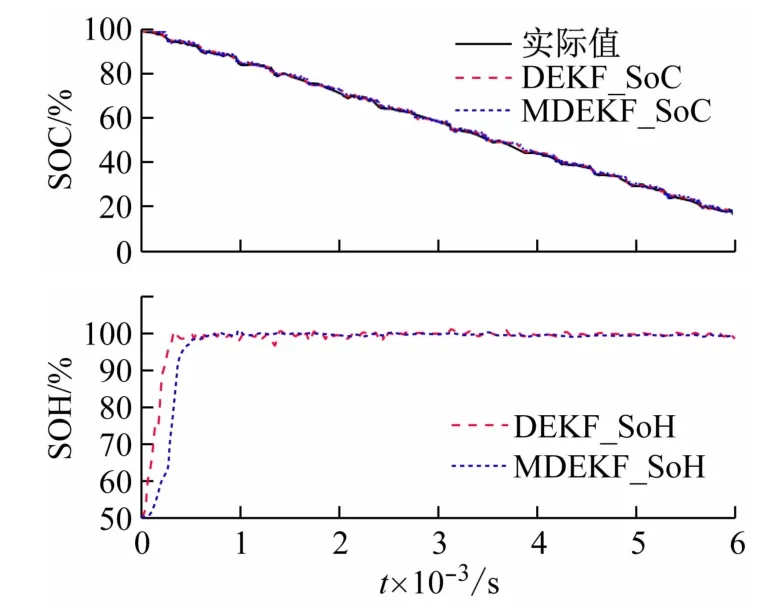
圖8 MDEKF與DEKF估計對比
測試噪聲修正效果,考慮實際應(yīng)用中電池端電壓會隨SoC下降而降低,端電壓測量的信噪比也會隨之降低的特點,利用Matlab的隨機信號發(fā)生器模擬噪聲影響,基于多尺度仿真參數(shù)設(shè)置對MDEKF算法是否加入噪聲統(tǒng)計估值器的估計效果進行對比,仿真結(jié)果如圖9所示。由圖可見,由于噪聲影響,未加噪聲統(tǒng)計估值器的MDEKF算法在3 000 s后狀態(tài)估計波動加劇,接近4000 s時產(chǎn)生發(fā)散,而加入噪聲統(tǒng)計估值器后的IMDEKF算法能很好地抑制噪聲影響。
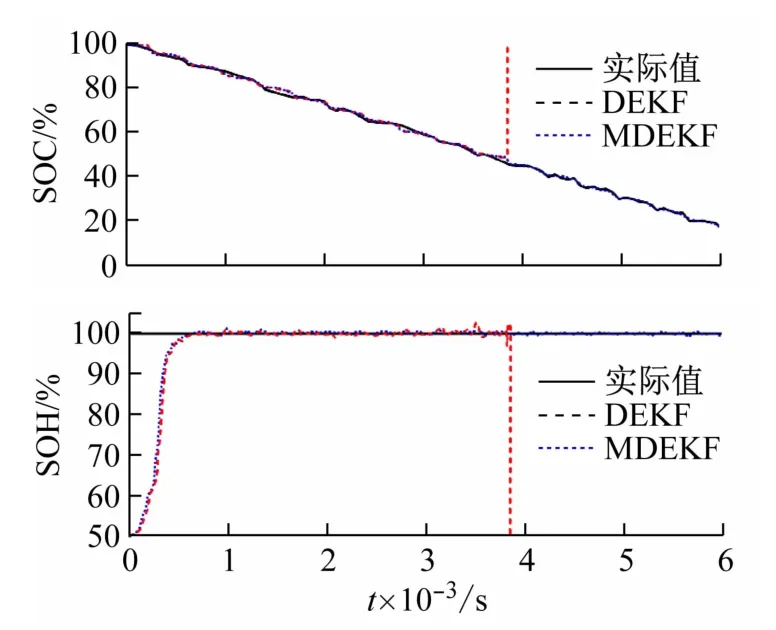
圖9 IMDEKF與MDEKF估計對比
為測試IMDEKF算法穩(wěn)定性,設(shè)置模擬電池組SoC=90%,SoH=100%,設(shè)置算法初始參數(shù)為:SoC=100%、SoH=84.6%、Rs=0.35Ω、Rp=0.03Ω、Cp=365 F。為加強對比效果,引入DUKF算法進行仿真對比,SoC與SoH估計測試結(jié)果分別如圖10、11所示。由圖10可見,即使SoC估計初始值錯誤,兩算法SoC估計曲線仍能迅速收斂,但IMDEKF于2 000 s左右估計誤差低于1%,平均誤差為2.1%,而DUKF于2 500 s左右估計誤差低于1%,平均誤差為2.6%,相比IMDEKF估計曲線收斂較為延遲。圖11表明在SoH估計初始值與實際值有較大偏差時,IMDEKF的SoH估計曲線能迅速收斂,2 000 s內(nèi)估計誤差收斂于5%以內(nèi),而DUKF曲線之前估計誤差較大。測試表明IMDEKF算法可以較好地實現(xiàn)對電池SoC/SoH聯(lián)合估計。
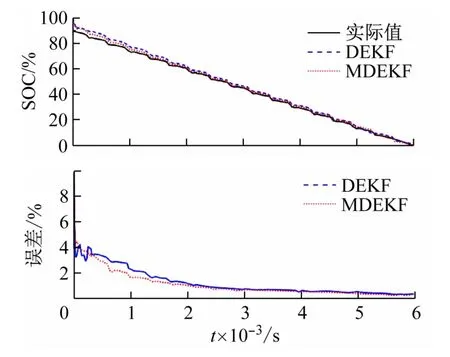
圖10 IMDEKF與DUKF的SoC估計對比
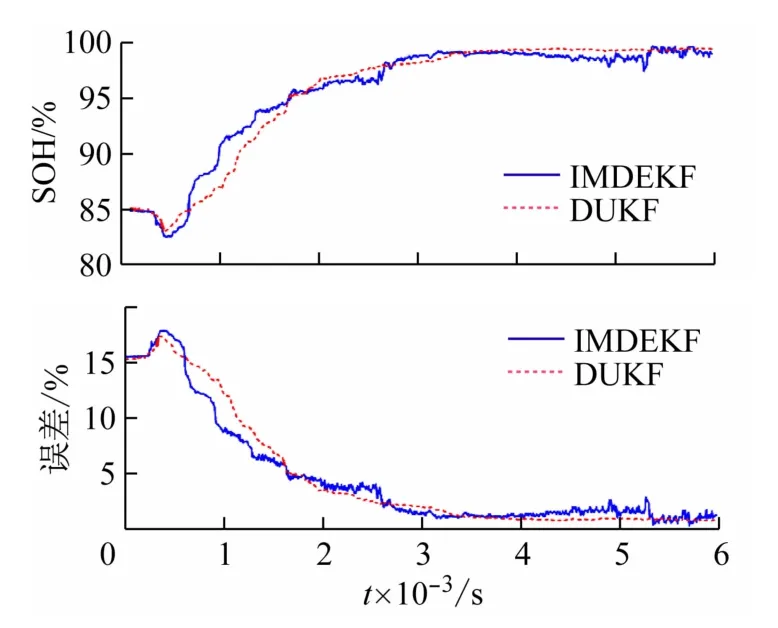
圖11 IMDEKF與DUKF的SoH估計對比
4 結(jié) 語
本文改進DEKF算法,通過仿真測試算法估算性能。結(jié)果表明,改進所得IMDEKF算法可實現(xiàn)SoCSoH聯(lián)合估計,保證估算精度的同時降低了運算復雜度,且對噪聲有良好抑制效果。在估計初始值錯誤情況下,算法能對二者估計值進行不斷修正,使得二者估計值迅速收斂接近真實值,不會因初始值出錯而導致無法對電池狀態(tài)進行估計,且二者估計值收斂后估計誤差均在5%以內(nèi)。
感謝廣西陽升新能源有限公司林廣宙先生為本文提供實驗測試條件。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
