變電站遙測數據頻繁跳變分析與處理
2021-08-17 09:04:32李世群董利忠馬燕全郝寶柱
電力安全技術 2021年6期
李世群,徐 峰,董利忠,馬燕全,郝寶柱
(國網冀北電力有限公司檢修分公司,北京 102488)
0 引言
電網運行穩態監控是調度控制系統最基本的應用之一,負責接收、分析和處理基礎平臺數據采集應用送來的穩態數據,并對其他應用提供可靠的穩態數據基礎和服務。而遙測值作為基礎自動化數據,也是穩態監控的主要數據來源,其準確性、穩定性直接影響使用穩態數據的其他應用,如狀態估計、AVC、AGC等[1]。
遙測數據跳變的表現形式一般有:偶發性跳變,短時間后恢復正常;數據跳變后,故障現象保持;遙測數據回零跳變;遙測數據滿碼值跳變;遙測數據長時間不刷新等[2]。
因遙測數據跳變導致電網調度控制系統數據異常,進而影響電網安全穩定運行,因此有必要對變電站遙測數據跳變進行分析,并有針對性的采取有效措施,防止類似故障的頻繁發生。
1 遙測跳變故障經過
2019年,調度主站自動化反映多座500 kV變電站發生電壓、電流、有功、無功等遙測值頻繁跳變。遙測跳變現象偶然出現且無規律可循,故障后經短暫時間(約15 s)很快恢復,遠小于后臺監控系統存儲變化遙測數據的最短周期(60 s),因此無法在監控后臺進行查看。同時由于故障持續時間短、無規律發生,測控裝置、遠動裝置無法存儲實時報文,專業人員難以第一時間到現場處理。
遙測值頻繁跳變影響主站智能電網調度控制(D5000)系統進行狀態估計和歷史報表的統計分析,急需解決和處理。
2 故障分析與排查
2.1 變電站遙測值上送機制
遙測值從變電站完成采集、處理后傳輸到主站D5000的過程如圖1所示。
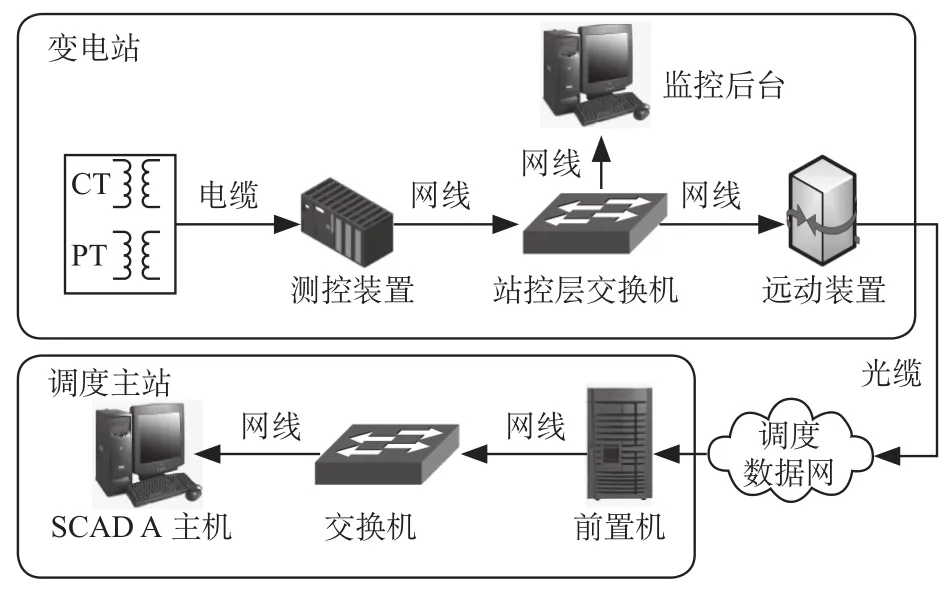
圖1 遙測數據傳輸原理
變電站電流互感器(CT)和變壓互感器(PT)完成電流和電壓的一/二次轉換后,通過電纜將電壓、電流二次值傳輸到測控裝置,測控裝置完成A/D轉換和相關運算后生成有功、無功、頻率等其他遙測值,通過網絡IEC103規約傳輸至站控層交換機,監控后臺和遠動裝置可從交換機獲取相關遙測值,監控后臺直接將一次值進行輸出顯示,遠動裝置進行規約轉換后,輸出IEC104規約報文,通過調度數據網向主站傳輸[3]。
調度主站前置機接收到相應IEC104遙測報文后,進行規約轉換,將數據傳至主站交換機,SCADA主機從交換機獲取實時遙測值,并經遙測處理模塊進行合理性校驗、替代處理、零漂處理、越限判斷、跳變監視等功能處理后更新SCADA實時庫[4]。
跳變監視處理是指通過合理性校驗進入實時庫的遙測量,可根據數據庫的定義進行跳變監視,當遙測量在指定時間段內的變化超過指定范圍的變化量、變化門檻時,主動給出告警提示。
2.2 故障定位
根據變電站遙測值上送機制,除了CT,PT至測控裝置之間為模擬量傳輸以外,其他的傳輸過程均為數字報文傳輸,因此對報文的獲取和分析是最重要和有效的故障定位手段。
測控、交換機、遠動裝置均沒有報文存儲功能,只有主站前置機具備報文存儲功能,而光纖通信系統的數據可靠性很高,可以排除調度數據網的問題,因此可以通過分析遙測跳變階段前置機收到的IEC104報文,來定位故障點位置是在主站還是變電站。
通過對主站前置機儲存的遙測報文圖2的分析,發現出現遙測跳變的時刻,主站前置機接收到的遙測報文也出現了跳變,也就是報文與主站顯示一致,因此可以排除主站的原因造成這些變電站遙測值跳變。
為進一步定位變電站內的故障點,對站控層交換機配置好鏡像端口,然后利用Wireshark抓包工具在站控層交換機抓取測控裝置上送遠動裝置的報文,通過對報文進行分析,確認主站發生遙測跳變的時刻,測控裝置上送遠動裝置的報文是否發生跳變。
分析抓取的報文可知,部分變電站測控裝置輸出報文未發生跳變,即測控裝置輸出無問題,因此將故障點定位到遠動裝置。
此外,還發現其他部分變電站測控裝置輸出報文發生了跳變,即遠動裝置無問題,因此將故障點定位到測控裝置。
2.3 遠動裝置故障分析
作為變電站自動化系統的信息控制中心,造成遙測跳變的遠動裝置型號為NSC301V(軟件版本V6.10),主要由電源板、CPU板、NET2-A4擴展網卡板和串口板組成[5]。
通過遠動裝置背板總線,實現各板卡之間的通信如圖2所示。
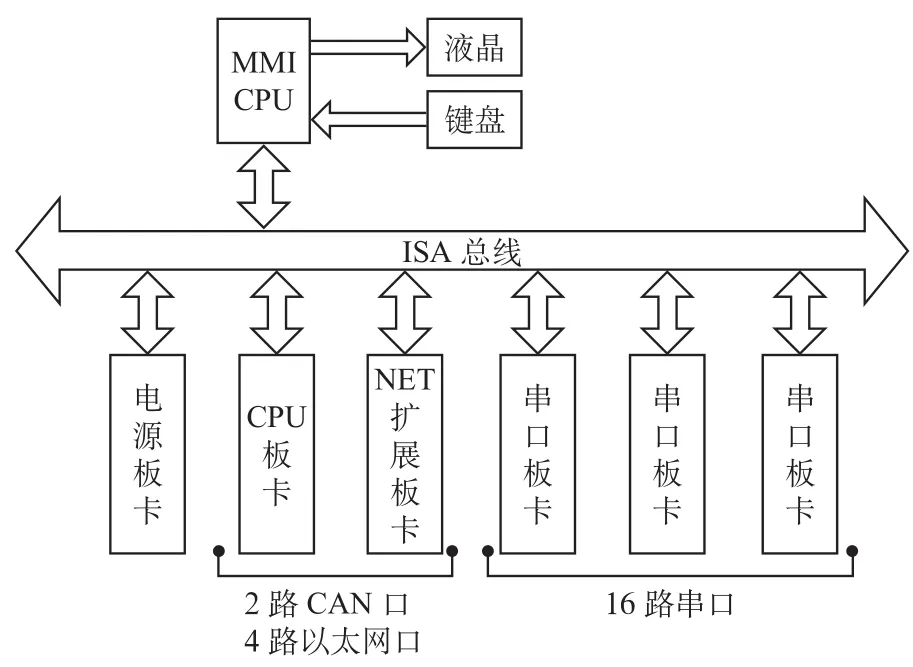
圖2 NSC301V遠動裝置內部通信情況
遠動裝置接收、處理并上送遙測數據的過程為:
(1) 由NET2-A4擴展網卡板接收測控裝置通過交換機上送的IEC103遙測數據。
(2) 接收后將遙測數據寫入CPU板的雙口RAM中,CPU板再從雙口RAM讀出后寫入遠動裝置數據庫。
(3) 遠動裝置將遙測數據通過CPU板的以太網口以IEC104格式輸出向主站發送。
在實驗室搭建模擬變電站現場軟硬件環境,通過2天的持續觀察和報文解析,成功復現了遙測跳變現象。隨后設置一個參照組,硬件配置與試驗組一致,軟件版本使用V6.42,同樣經過2天的持續觀察和報文解析,發現沒有發生遙測跳變現象。
下一步對試驗組遠動裝置軟件版本進行升級(升級到V6.45),繼續觀察,未發生遙測跳變現象。
分析如下:NSC301V遠動裝置內部雙口RAM需寫入寫出遙測數據,如果雙口RAM硬件問題存在誤碼,CPU板讀取遙測值就會出錯,從而出現遙測跳變故障。因此,V6.40以后的軟件版本在NET2-A4側對發送到CPU側的不同數據增加了校驗功能,CPU側對收到的不同類型的數據進行校驗通過后再進行下一步處理。站內遠動裝置不具備校驗功能,在雙口RAM硬件問題出現誤碼的情況下出現了遙測跳變。
2.4 測控裝置故障分析
作為變電站自動化系統的重要組成部分,造成遙測跳變的測控裝置型號為NSD500V,其內部通信結構如圖3所示。
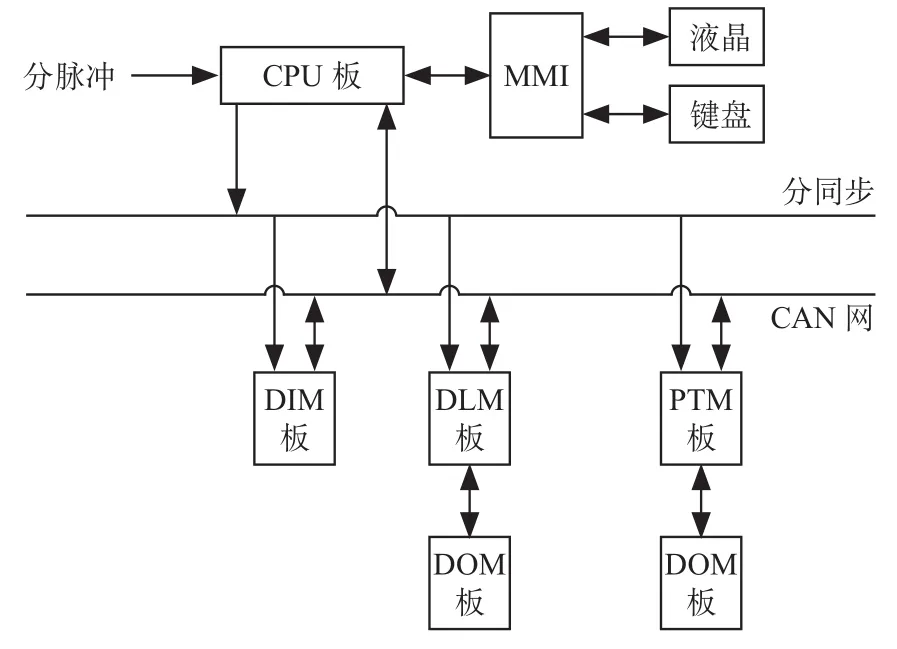
圖3 NSD500V測控裝置功能框
其中,CPU模件通過CAN網與其他智能I/O通信,DLM為智能交流采集模件,提供4CT+5PT的交流輸入和8個對象的控制,PTM為智能交流電壓采集模件,提供8PT交流輸入和8個對象的控制[6-7]。
由于這些變電站站控層采用IEC61850協議進行通信,因此交流模擬量進入PTM/DLM板經過A/D采樣轉換之后還需要進行浮點數的轉換,如圖4所示。
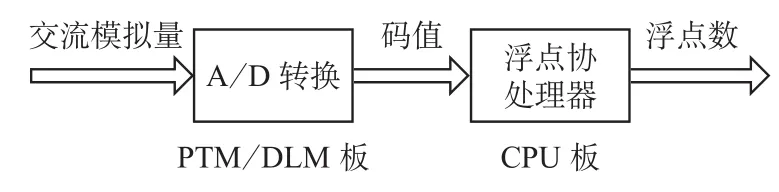
圖4 測控裝置遙測值轉換原理
NSD500V測控裝置使用的CPU芯片為POWERPC系列的MPC8247,該芯片具有浮點協處理器,當配置使能協處理器時支持硬件浮點,未使能時支持軟件浮點計算。
通過現場檢查發現,出現遙測值跳變的測控裝置版本軟件使用的是軟件浮點計算,其計算精度和實時性能夠滿足應用需要,所以未使能協處理器浮點寄存功能。
當CPU在浮點計算過程中被高優先級中斷打斷時,計算中間值不會被存入浮點寄存器,導致中間計算值丟失,產生非法數錯誤。又由于測控裝置與后臺、遠動之間的通信采用了UDP廣播及UDP/IP點對點2種協議,這樣保證了信息傳輸的實時性,卻犧牲了傳輸質量,非法數將直接上送給后臺和遠動。
現場大流量的ARP廣播報文會引起測控裝置頻繁產生處理網絡任務的高優先級中斷,導致裝置在進行浮點運算時會出現較大概率被中斷打斷,從而產生浮點非法數的錯誤。同時,由于測控裝置上送浮點數時需要進行變化死區和零值死區等參數判斷處理,出現一次浮點非法數后就一直要使用該非法數與新遙測值進行比較,結果仍為非法數,從而造成裝置上送的遙測數據始終保持為非法浮點數。
3 遙測跳變故障處理
3.1 遠動裝置故障處理
對于因遠動裝置故障造成的遙測值頻繁跳變的變電站,因為判斷是雙口RAM硬件誤碼原因導致,與裝置廠家確認后,采取的措施是廠家更換CPU板,同時升級遠動裝置軟件版本到V6.45。
采取措施后對變電站遙測值持續觀察,沒有再發生遙測值頻繁跳變的故障。
3.2 測控裝置故障處理
對于因測控裝置故障造成的遙測值頻繁跳變的變電站,采取的措施是廠家升級全站測控裝置軟件版本,使能CPU的浮點協處理器,將浮點計算由軟浮點修改為硬浮點,從而避免浮點計算過程被中斷影響而產生非法數。
采取措施后對變電站遙測值持續觀察,沒有再發生遙測值頻繁跳變的故障。
3.3 遠動裝置計劃改造
統計出問題的該型號遠動裝置運行年限集中在8~10年,因此可以初步判斷雙口RAM的使用壽命也不超過10年,因此有必要對接近年限的遠動裝置提前準備進行改造和更換。
4 結論
變電站遙測數據跳變是綜自系統的典型故障,其原因普遍集中在測控裝置和遠動裝置故障,遠動裝置雙口RAM誤碼校驗和測控裝置軟浮點值轉換受中斷影響是導致遙測數據頻繁跳變的2個典型原因,通過硬件更換和軟件升級,實現了遙測數據頻繁跳變的處理。
通過分析遙測值上送機制,并以近期多座500 kV變電站遙測值頻繁跳變為對象,提供跳變分析和處理的正確思路和手段,如利用報文獲取和分析手段進行故障定位等,從而提高自動化系統數據的準確性和穩定性,保證電網的安全穩定運行。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
汽車維護與修理(2016年10期)2016-07-10 08:17:41
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
