衛(wèi)星推力器模擬器校準(zhǔn)技術(shù)研究
2021-08-17 05:28:40王賀迎富雅瓊武宇婧孫匯聰
宇航計(jì)測(cè)技術(shù) 2021年3期
關(guān)鍵詞:信號(hào)
王 凱 王賀迎 富雅瓊 武宇婧 孫匯聰
(1.北京東方計(jì)量測(cè)試研究所,北京 100086;2.中國(guó)計(jì)量大學(xué),浙江杭州 310018)
1 引 言
衛(wèi)星推力器是姿軌控部件中的執(zhí)行機(jī)構(gòu)。在地面模擬實(shí)驗(yàn)中,衛(wèi)星姿軌控半實(shí)物仿真系統(tǒng)通過(guò)硬件和軟件為姿軌控系統(tǒng)測(cè)試提供衛(wèi)星動(dòng)力學(xué)模型[1-3],系統(tǒng)產(chǎn)生激勵(lì)信號(hào),進(jìn)行實(shí)時(shí)數(shù)據(jù)的采集和處理,開(kāi)展衛(wèi)星地面仿真測(cè)試試驗(yàn)。其中,推力器模擬器接收星載計(jì)算機(jī)(AOCC)的噴氣信號(hào)指令,根據(jù)推進(jìn)系統(tǒng)的工作狀態(tài)實(shí)時(shí)計(jì)算噴氣時(shí)長(zhǎng)[4-7]。目前,推力器模擬器的校準(zhǔn)依靠頻率計(jì)和動(dòng)力學(xué)計(jì)算機(jī)完成。該方法需要人工設(shè)置、接線、抄數(shù)、計(jì)算等工作,耗時(shí)費(fèi)力,由于人為因素容易造成校準(zhǔn)結(jié)果存在偏差[8-11]。本文闡述了一種推力器模擬器自動(dòng)在線校準(zhǔn)裝置。該裝置集成度高,可實(shí)現(xiàn)推力器模擬器的全流程、動(dòng)態(tài)校準(zhǔn)。
2 推力器模擬器校準(zhǔn)方法
推力器模擬器通過(guò)接收動(dòng)力學(xué)計(jì)算機(jī)發(fā)送的噴氣時(shí)間指令,經(jīng)過(guò)模擬器內(nèi)部算法輸出電壓脈沖信號(hào)。目前,航空、航天領(lǐng)域?qū)ν屏ζ髂M器的校準(zhǔn)方法較為一致,主要依靠動(dòng)力學(xué)計(jì)算機(jī)、頻率計(jì)、測(cè)試線纜完成校準(zhǔn)測(cè)試工作。
如圖1所示,依據(jù)推力器模擬器接口定義,測(cè)試線纜將頻率計(jì)接入被校準(zhǔn)推力器模擬器線路中,通訊線纜將動(dòng)力學(xué)計(jì)算機(jī)和被校準(zhǔn)設(shè)備相連。動(dòng)力學(xué)軟件設(shè)置噴氣周期和噴氣時(shí)間等信息,被校準(zhǔn)推力器模擬器輸出對(duì)應(yīng)的脈沖信號(hào)。調(diào)節(jié)頻率計(jì)合適的測(cè)量檔位,觀測(cè)頻率計(jì)脈沖頻率、占空比并記錄。以此類(lèi)推,在動(dòng)力學(xué)軟件上設(shè)置推力器模擬器的典型不同值后觀測(cè)頻率計(jì)的讀數(shù)。經(jīng)過(guò)對(duì)比動(dòng)力學(xué)軟件上的理論設(shè)置值和頻率計(jì)讀數(shù)計(jì)算后的噴氣時(shí)間實(shí)測(cè)值完成校準(zhǔn)。
目前傳統(tǒng)校準(zhǔn)方式有較多缺陷。一是校準(zhǔn)過(guò)程需對(duì)各類(lèi)儀器儀表進(jìn)行反復(fù)操作,頻率計(jì)采集脈沖信號(hào)頻率值和占空比后需進(jìn)行讀數(shù),經(jīng)過(guò)復(fù)雜計(jì)算得到實(shí)際噴氣時(shí)間值,自動(dòng)化程度低;二是當(dāng)更改條件或參量變化時(shí),則當(dāng)前的校準(zhǔn)工作無(wú)法及時(shí)響應(yīng)。傳統(tǒng)的校準(zhǔn)方式不能體現(xiàn)仿真系統(tǒng)的動(dòng)態(tài)性、全面性和準(zhǔn)確性;三是校準(zhǔn)過(guò)程需要插接線纜、儀表讀數(shù)、數(shù)據(jù)統(tǒng)計(jì)等人工操作,引入誤差較大。總之,傳統(tǒng)的校準(zhǔn)方法不具備先進(jìn)性。
3 推力器模擬器校準(zhǔn)裝置設(shè)計(jì)
推力器模擬器模擬噴氣脈沖輸出,校準(zhǔn)裝置記錄噴氣脈沖在每個(gè)采樣周期的高電平時(shí)間TH,以動(dòng)力學(xué)取數(shù)周期為采樣周期(仿真系統(tǒng)為32ms),每次脈沖的上升沿將計(jì)數(shù)結(jié)果打入緩存中,周期性計(jì)算脈沖高電平作用時(shí)間。如圖2所示。
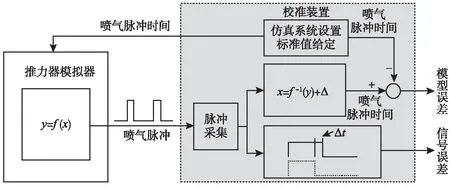
圖2 推力器模擬器校準(zhǔn)示意圖
校準(zhǔn)裝置設(shè)置模擬器輸出噴氣脈沖,噴氣時(shí)間為t1;模擬器將設(shè)定值t1轉(zhuǎn)化為脈沖輸出。校準(zhǔn)裝置對(duì)脈沖時(shí)間進(jìn)行采集,給出測(cè)定值TH與設(shè)置值t1的誤差,并作為噴氣信號(hào)誤差。同時(shí),憑借正算理論模型推導(dǎo)出高電平時(shí)間,憑借反算理論模型反解高電平時(shí)間,根據(jù)反算結(jié)果給出模型誤差。
3.1 硬件設(shè)計(jì)
校準(zhǔn)裝置推力器硬件設(shè)計(jì)中,功能上主要實(shí)現(xiàn)噴氣脈沖時(shí)間信息的輸出和模擬器回傳噴氣脈沖信號(hào)的高精度采集。內(nèi)部電路原理框圖如圖3所示。
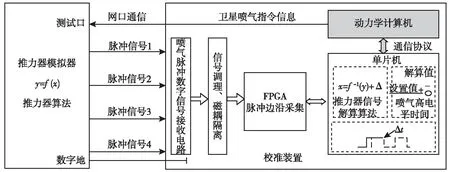
圖3 推力器模擬器校準(zhǔn)模塊硬件框圖
在進(jìn)行測(cè)試校準(zhǔn)時(shí),將推力器模擬器輸出的4路脈沖信號(hào)通過(guò)測(cè)試電纜接入校準(zhǔn)裝置。在校準(zhǔn)裝置中,經(jīng)過(guò)多通道數(shù)字脈沖信號(hào)接收電路進(jìn)行信號(hào)調(diào)理,信號(hào)濾波,減小脈沖信號(hào)干擾。為了安全保護(hù),將數(shù)字電路與模擬電路通過(guò)磁偶隔離,F(xiàn)PGA采集脈沖信號(hào)周期內(nèi)邊沿時(shí)刻,完成對(duì)噴氣高電平時(shí)間的計(jì)算和解析。單片機(jī)通過(guò)訪問(wèn)FPGA中RAM數(shù)據(jù)信息,根據(jù)推力器解算算法,得到噴氣高電平時(shí)間。實(shí)測(cè)值與理論值進(jìn)行對(duì)比,理論信號(hào)波形和實(shí)測(cè)信號(hào)波形進(jìn)行對(duì)比,完成模型誤差和信號(hào)誤差的計(jì)算。原始數(shù)據(jù)依據(jù)通信協(xié)議上傳至動(dòng)力學(xué)計(jì)算機(jī)顯示完成自動(dòng)校準(zhǔn)。
推力器模擬器校準(zhǔn)模塊接收5V的脈沖信號(hào)(噴氣信號(hào)),如圖4所示。信號(hào)在采樣電阻上產(chǎn)生壓降,電流從地回流(地與ADU二次地通過(guò)磁珠相連)。跟隨電路信號(hào)輸入端和采樣電阻都設(shè)置了冗余限流電阻,防止模擬器的下行信號(hào)在校準(zhǔn)裝置內(nèi)的發(fā)生短路。
圖4 模擬器輸出脈沖信號(hào)圖
信號(hào)調(diào)理模塊中,差分運(yùn)放選用INA128儀表放大器對(duì)采樣電阻兩端電壓信號(hào)進(jìn)行差分放大,磁耦隔離選用AUM1400芯片將信號(hào)端與FPGA數(shù)字信號(hào)端隔離。如圖5所示。
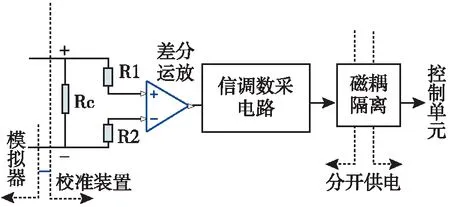
圖5 信號(hào)調(diào)理原理圖
3.2 軟件設(shè)計(jì)3.2.1 上位機(jī)軟件設(shè)計(jì)
校準(zhǔn)裝置上位機(jī)軟件的主要功能是與控制單元進(jìn)行通信,動(dòng)力學(xué)計(jì)算機(jī)通過(guò)網(wǎng)口對(duì)推力器模擬器發(fā)送上位機(jī)指令,同時(shí)采集回傳的數(shù)據(jù)通過(guò)運(yùn)算并顯示給用戶以實(shí)現(xiàn)監(jiān)測(cè)。上下位機(jī)的通訊應(yīng)遵循一定的通信協(xié)議,通訊協(xié)議指令格式如圖6所示。
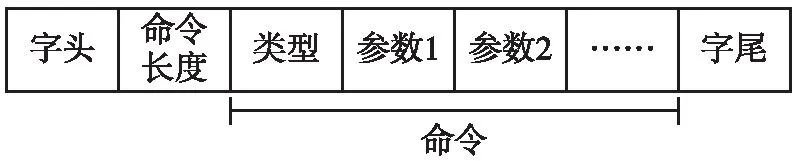
圖6 通訊協(xié)議格式圖
上位機(jī)發(fā)送指令見(jiàn)表1。其中,每路噴氣信號(hào)設(shè)置包含三個(gè)字節(jié),其中前兩個(gè)為頻率值,后一個(gè)為占空比(控制噴氣時(shí)間);噴氣頻率設(shè)置值為16位數(shù)據(jù),前一個(gè)字節(jié)為高8位,后一個(gè)字節(jié)為低8位(單位Hz);第三個(gè)字節(jié)設(shè)置脈沖的占空比,設(shè)定值范圍為0~32(十進(jìn)制),對(duì)應(yīng)占空比0/32~32/32(信號(hào)周期為32ms)。
推力器的網(wǎng)口通信中,頻率與占空比的分辨率均為1。推力器模擬器收到推力器校準(zhǔn)軟件發(fā)送的網(wǎng)口設(shè)置數(shù)據(jù)后,將返回?cái)?shù)據(jù)幀,推力器校準(zhǔn)軟件根據(jù)返回的數(shù)據(jù)幀可判斷頻率與占空比是否設(shè)置成功,下位機(jī)回傳數(shù)據(jù)指令格式見(jiàn)表2。

表1 上位機(jī)下發(fā)指令Tab.1 Instructions issued by upper computer字頭命令長(zhǎng)度推力器信號(hào)1信號(hào)2信號(hào)3信號(hào)4備份備份字尾0XAA0X4C0X040X040X010X010X040X010X010X040X010X010X040X010X010X000X000X55

表2 下位機(jī)回傳數(shù)據(jù)指令Tab.2 Data return instruction of lower computer字頭命令長(zhǎng)度推力器設(shè)置成功備份備份字尾0XAA0X040X010X01/000X000X000X55
推力器模擬器校準(zhǔn)軟件測(cè)量界面如圖7所示,界面中包含設(shè)置采集板卡的板卡號(hào)和通道號(hào)信息,板卡號(hào)可根據(jù)推力器模擬器采集板卡在PXI機(jī)箱中的安裝插槽確定,通道號(hào)可以根據(jù)采集板卡連接的通道確定。點(diǎn)擊啟動(dòng)即可采集推力器模擬器的脈沖信號(hào)輸出,并在該軟件界面中的繪圖框中進(jìn)行顯示,經(jīng)過(guò)推力器算法顯示相應(yīng)的高電平時(shí)間,理論高電平時(shí)間由設(shè)置值正算得到。
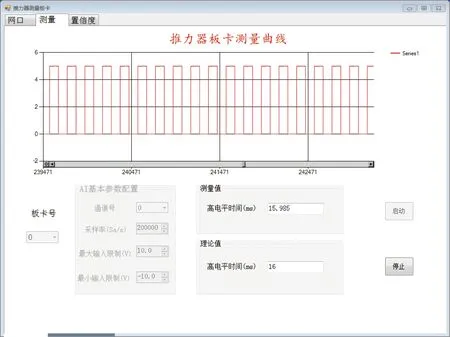
圖7 校準(zhǔn)軟件界面圖
3.2.2 脈沖信號(hào)解算設(shè)計(jì)
脈沖信號(hào)的解算過(guò)程在FPGA和單片機(jī)內(nèi)進(jìn)行,算法流程如圖8所示。
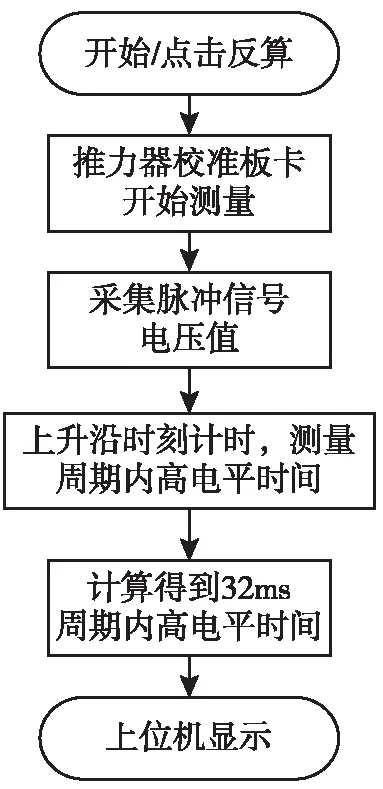
圖8 推力器模擬器反算算法流程框圖
1)計(jì)算脈沖信號(hào)占空比。板卡默認(rèn)采樣的是-5V~5V的電壓信號(hào),首先判斷1s內(nèi)電壓采樣數(shù)組中大于0V點(diǎn)的數(shù)量,大于0V點(diǎn)的信號(hào)數(shù)量與數(shù)據(jù)總長(zhǎng)度的比值即可得到此次測(cè)量脈沖波形的占空比;
2)計(jì)算信號(hào)上升沿時(shí)刻。對(duì)當(dāng)次得到的電壓信號(hào)進(jìn)行判斷,如果k-1時(shí)刻的值小于0V,且k時(shí)刻值大于零,則認(rèn)為k時(shí)刻就是波形的上升沿時(shí)刻;
3)計(jì)算高電平時(shí)間。在當(dāng)次得到的1s電壓采樣數(shù)組中,取出32ms所對(duì)應(yīng)的數(shù)據(jù),判斷大于0V點(diǎn)的個(gè)數(shù),最終得到32ms內(nèi)高電平時(shí)間。
4 不確定度分析
將校準(zhǔn)裝置與推力器模擬器聯(lián)機(jī)測(cè)試,通過(guò)設(shè)置信號(hào)的頻率和占空比值,利用固定周期內(nèi)信號(hào)的高電平時(shí)間來(lái)模擬真實(shí)推力器的噴氣時(shí)間。通過(guò)對(duì)比理論值和實(shí)測(cè)值完成校準(zhǔn)。同時(shí),對(duì)測(cè)試結(jié)果進(jìn)行不確定度評(píng)定,滿足型號(hào)的校準(zhǔn)需求。測(cè)試結(jié)果見(jiàn)表3。
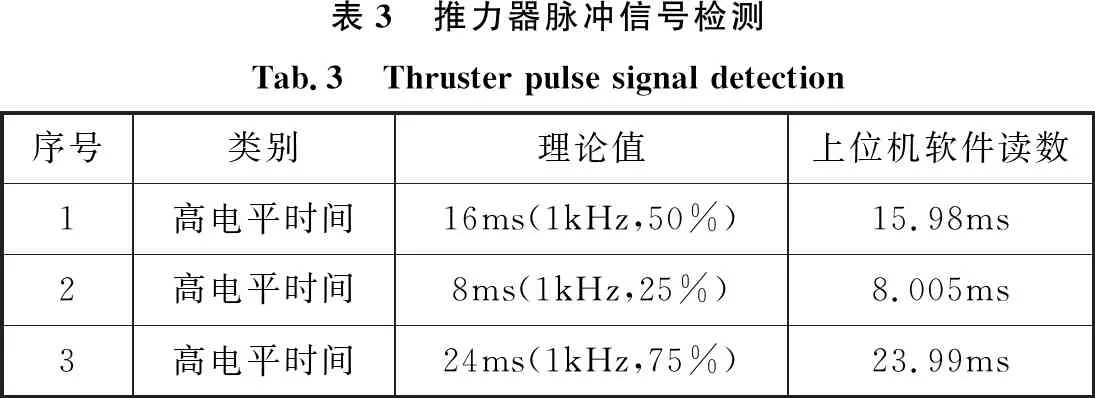
表3 推力器脈沖信號(hào)檢測(cè)Tab.3 Thruster pulse signal detection序號(hào)類(lèi)別理論值上位機(jī)軟件讀數(shù)1高電平時(shí)間16ms(1kHz,50%)15.98ms2高電平時(shí)間8ms(1kHz,25%)8.005ms3高電平時(shí)間24ms(1kHz,75%)23.99ms
4.1 測(cè)量模型建立
推力器模擬器脈沖信號(hào)高電平時(shí)間測(cè)量誤差為
ΔT=Δ1+Δ2+Δ3
(1)
式中:Δ1——校準(zhǔn)裝置脈沖信號(hào)周期測(cè)量不準(zhǔn)引入的誤差;Δ2——測(cè)量結(jié)果分辨力引入的誤差;Δ3——測(cè)量重復(fù)性引入的誤差。
4.2 不確定度傳播率
推力器模擬器脈沖信號(hào)高電平時(shí)間各誤差來(lái)源引入的誤差互不相關(guān),故
uc(rel)(Δf)2=urel(Δ1)2+urel(Δ2)2+urel(Δ3)2
(2)
4.3 標(biāo)準(zhǔn)不確定度評(píng)定
4.3.1 校準(zhǔn)裝置脈沖信號(hào)周期測(cè)量誤差引入的不確定度分量u1
校準(zhǔn)裝置時(shí)基最大允許誤差為±1×10-4s,認(rèn)為是均勻分布,則有
4.3.2 校準(zhǔn)裝置脈沖信號(hào)重復(fù)性引入的不確定度分量u2
測(cè)量重復(fù)性引入的標(biāo)準(zhǔn)不確定度按A類(lèi)標(biāo)準(zhǔn)不確定度評(píng)定,選取1kHz/50%點(diǎn)用校準(zhǔn)裝置對(duì)推力器模擬器高電平時(shí)間測(cè)量10次,利用貝塞爾公式計(jì)算
4.3.3 校準(zhǔn)裝置讀數(shù)分辨力引入的不確定度分量u3
校準(zhǔn)裝置頻率讀數(shù)分辨力為0.001ms,認(rèn)為是均勻分布,則有
4.4 合成標(biāo)準(zhǔn)不確定度
推力器模擬器脈沖信號(hào)高電平時(shí)間測(cè)量合成標(biāo)準(zhǔn)不確定度,取設(shè)備分辨力和重復(fù)性不確定度大者計(jì)算合成不確定度為
4.5 擴(kuò)展不確定度
取k=2,則其擴(kuò)展不確定度為
U(ΔT)=kuc(ΔT)=1.2×10-4s
5 結(jié)束語(yǔ)
推力器模擬器校準(zhǔn)裝置的研發(fā)有助于測(cè)試人員更準(zhǔn)確、更清晰的觀測(cè)和模擬衛(wèi)星姿軌控系統(tǒng)中執(zhí)行機(jī)構(gòu)的健康運(yùn)行狀態(tài)。其優(yōu)點(diǎn)在于:滿足了多通道、多型號(hào)推力器的校準(zhǔn)工作;校準(zhǔn)裝置替代了目前由多個(gè)測(cè)試設(shè)備(頻率計(jì)、動(dòng)力學(xué)計(jì)算機(jī)等)組成的復(fù)雜校準(zhǔn)系統(tǒng),提升效率降低成本;優(yōu)化人工計(jì)數(shù)、抄數(shù)、計(jì)算等繁瑣過(guò)程,提高自動(dòng)化測(cè)試程度,使得校準(zhǔn)工作在線化、規(guī)范化。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06