一種實時動態跟蹤的對時方法
2021-08-13 11:53:44吳納磊徐少雄張春豪賈海旭李英春
農村電氣化 2021年8期
關鍵詞:故障
吳納磊,徐少雄,張春豪,賈海旭,李英春
(石家莊科林電氣股份有限公司,河北 石家莊 050000)
隨著科學技術及經濟的不斷發展,不管是企業還是人民生活對電的需求有了進一步的提高,國家電網有限公司已經將停電時間作為考核標準。為了減少停電時間,迅速查找故障源,國家電網有限公司廣泛應用了暫態錄波型故障指示器,其具有安裝方便,判斷故障準確率高,用戶使用方便等特點。最主要的特點是將線路發生故障時刻的三相波形錄下來并上傳至主站,供主站對故障進一步分析。這就要求三相波形的同步性要高,并且是越高越好。
暫態錄波型故障指示器一般由1個匯集單元和3個采集單元構成。現場安裝時匯集單元安裝在電線桿上距地大約3 m,3個采集單元分別安裝在10 kV的ABC三相線路上(可帶電安裝),匯集單元與主站之間通過GPRS通信,匯集單元和采集單元之間通過433 MHz的無線進行通信。上傳給主站的錄波數據是由ABC三相線路上的設備分別采樣存儲的,為了滿足三相波形之間的同步性,就要保證三相的設備在同一時刻對線路電流電壓進行采樣,這就需要在整套故障指示器系統中設計一套精確穩定的時間系統。
輸電線路上出現故障的時刻是不確定的,隨時都可能發生,這就要求三相設備的時間系統必須長時間處于穩定狀態。由于晶振本身的偏差會使得設備的時間系統隨著時間的推移誤差逐漸變大,如果通過頻繁對時來解決這個問題,通信信道就沒有能力傳輸業務數據,而433 MHz的信道數量有限,所以不能通過增加信道的方式來解決此問題。故提出了一種實時動態跟蹤的對時方法來解決短時間內不對時還能夠保證三相設備之間的對時精度。
1 對時方法
本文提出的實時動態跟蹤的對時方法是基于主從結構的通信系統,如圖1所示,主機通過GPRS信道接受主站下發的對時命令或者接受GPS的對時信號來保證本身的時間的準確性,通過發送廣播對時命令的方式將時間下發到從機設備,一般的對時方式為從機接受到主機下發的對時命令后根據測得的傳輸時間進行簡單的補償直接對時給自身的時間系統,這樣能夠保證在對完時時時間系統是精準的,但經過時間的推移各個從設備之間的時間偏差會越來越大。基于實時動態跟蹤的對時方法可以在短時間內避免這一問題,給業務數據的傳輸留了足夠的時間。
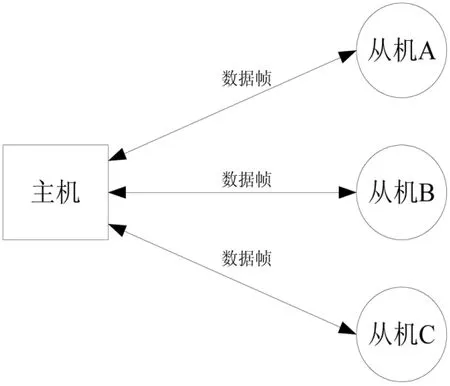
圖1 主從結構的通信系統
主機設備與各個從機設備之間的通信方式采用分時復用的方式。如圖2所示主機分別在時間點Tz0、Tz1、Tzn發送數據給從機設備,即主機每間隔T時間給從機發送一幀數據。
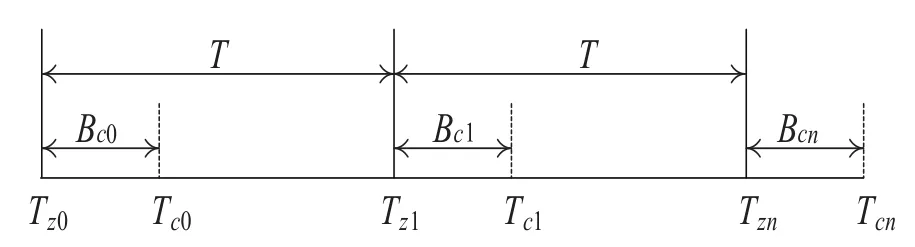
圖2 主機給從機下發對時命令的時序圖
圖2中的T為主機設備發送數據給從機設備的周期;Tz0、Tz1、Tzn分別為主機設備發送數據的時刻;Tc0、Tc1、Tcn分別為從機設備收到數據的時刻;Bc0、Bc1、Bcn分別為數據的傳輸時間;
主機設備按照圖2中的周期給從機設備下發對時命令,對時命令中帶有時間戳,當有其他業務數據時就暫停下發對時命令,沒有其他業務數據的時候下發對時命令,而從機在接受到對時命令以后進行以下步驟的處理:
A.接收到對時命令。
B.判斷是否首次收到對時命令,如果是,將收到的當前時間戳作為系統時間寫入本地,否則執行步驟。
C.如果距上次收到對時命令的時間超過T+ΔT,放棄本次對時命令,否則執行步驟D,其中ΔT為間隔ΔT間從機未接受到對時命令,還能保證從機時間精度的最大值。
D.計算當前收到的對時命令中的時間戳和上次收到對時命令中的時間戳之間的差t1,計算收到當前對時命令時和上次對時命令時的本地時間差t2,如果abs(t1-t2)>T1,放棄本次對時命令,T1為主機在兩次對時的間隔時間內走過的時間與從機在兩次對時的間隔時間內走過的時間允許的最大差值,否則執行下一步驟。
E.根據當前收到的對時命令中的時間戳和上次收到的對時命令中的時間戳Tz1和Tz0,計算出在此間隔內主機走過的時間Pz,Pz=Tz1-Tz0。
根據當前和上次收到對時命令時的本地時刻Tc1和Tc0,計算出在此間隔內從設備走過的時間Pc,Pc=Tz1-Tz0。執行步驟F。
F.本地的晶振頻率為Fclock,經過PZ晶振震蕩次數為PC/(1/Fclock),設置本地計數器,使之后晶振震動次數為PC/(1/Fclock)時,經過的時間為Pz。
計算:時間差ΔT=PC-Pz;調整量A= Δt。
進一步地:步驟E中,計算:Δkn=Δt+An-1,其中:An=aΔkn+(1-a)An-1。式中:n為一共收到連續對時命令的數量;Δkn為本次調整量的中間值;Ai為連續第i次收到對時命令后的調整量,1≤i≤n,A1=0,A2=Δt2;a為調整系數。
調整量A=An步驟F中,具體執行的步驟包括:
每ms調整1次晶振震蕩作為調整的基礎值,計算在T時間內,以基礎值為基準,可以調整的總時間為:Tp=T×1/Fclock,T的單位為ms。
計算在T時間內完成調整量的調整,每ms需要調整的晶振震蕩次數:T0=A/Tp,A/Tp代表取整。
計算將T0分配到每ms后,剩余的需要調整的時間:T1=A%Tp,A%TV代表取余數。
如果T1≠0,計算調整范圍:Tv=T1/(1/Fclock)。
設置計數器:在前TT內,每ms的計數為:當前計數+Tv+an,之后的每ms的計數為:當前計數Tv,其中,如果Av>0,an=1,否則,an=-1。
MCU使用計數器完成定時功能,晶振參數及定時器的工作頻率確定后,每個時間單位的晶振震蕩次數是一定的。如定時器的工作頻率為12 MHz,定時器的TOP值設為(12000-1),也就是說定時器的計數器從0計數到TOP值時所經過的時間是1 ms。
本方法依據絕對的時間參考,將定時器中的計數作為一個變量進行調整,可以精細調整本地時鐘精度。
采用本文提出的方案,根據收到的對時命令中的時間戳作為參考,調整一定時間內的晶振震蕩計數,精細調整本地時鐘與主機同步,實現多個從設備的時鐘同步,從設備之間的時間差在±2μs內。
2 暫態錄波型故障指示器
以上介紹的實時動態跟蹤的對時方法應用到暫態錄波型故障指示器中以滿足三相錄波數據的同步性。本文提出的實時動態跟蹤的對時方法主要是在采集單元中實現,采集單元系統的結構圖如圖3所示。
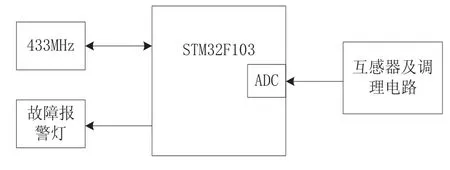
圖3 采集單元采樣結構圖
當采集單元接受到匯集單元的對時幀并進行跟蹤對時后,可以認為三相采集單元中的時鐘系統是精準的,即三相設備的ms沿中對齊的。采集單元的主頻為12 MHz,啟動AD轉換的定時器的時鐘頻率也是12 MHz,每周波采樣100個點,即啟動AD轉換的定時器的周期值就為2400。在每ms沿到來的時候將AD轉換定時器的當前計數器的值歸零,重新計數。經過測試三相設備的定時器值在間隔1 ms時的偏差是很小的完全滿足應用。這樣就能夠滿足三相采集單元錄波數據的同步性。
3 測試及結果分析
使用繼電保護測試儀輸出狀態序列,模擬現場的接地故障,如圖4為模擬的A相接地故障的狀態序列。
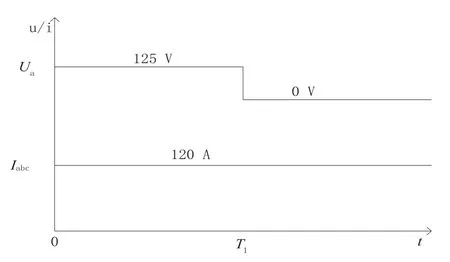
圖4 A相接地故障的狀態序列圖
圖中Iabc為ABC相正常負荷電流120 A,Ua為A相電壓,T1為A相發送接地故障的時刻,故障指示器在檢測到該序列時就會將接地時刻的波形存儲下來并上傳到主站,在PC機上使用查看comtrade文件格式波形軟件,查看上傳的波形如圖5所示。
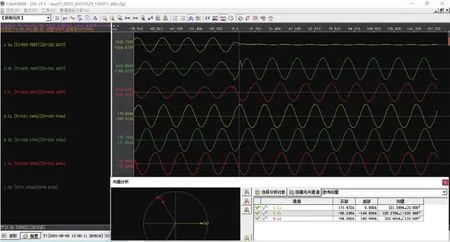
圖5 A相接地故障波形
從圖5中可以看出,三相錄波數據之間的角差為0.3°左右,折算為時間約16μs,為主站對接地故障波形的分析提供了扎實的基礎數據,從而提高故障判斷的準確率。
4 結束語
本文設計的實時動態跟蹤的對時方法應用于暫態錄波型故障指示器中,不僅提高了整個產品的對時系統的精度,還促使產品可以更加長久穩定的運行,并且為在主站分析波形判斷線路故障提供了可靠有效地波形數據,提高了故障判斷的準確性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
