一種基于目標跟蹤的單線陣左右舷分辨方法
2021-08-11 15:31:06方益喜
艦船科學技術 2021年7期
關鍵詞:模型
方益喜
(中國船舶集團有限公司第七一五研究所,浙江 杭州 310023)
0 引 言
拖曳線列陣聲吶是現(xiàn)代聲吶的重要發(fā)展方向之一,其具有孔徑大、工作頻率低、探測距離遠等特點,廣泛應用在各類艦艇上,成為水下遠距離探測的重要有效手段。常規(guī)的單線陣由一系列無指向性的水聽器組成,由于水聽器沒有指向性,其對整個圓錐面上所有入射信號的響應完全一致,如果考慮水平面一個平面,則單線陣將出現(xiàn)左右舷模糊問題,無法區(qū)分信號來源于左舷還是右舷。常規(guī)的單線陣通常采用平臺機動的方式,根據(jù)聲吶時間-方位歷程圖中目標舷角的變換趨勢來判斷左右舷或者是利用平臺機動時陣型估計的信號處理方法來區(qū)分左右舷[1–7]。舷角的變化通常需要人工來完成,無法進行自動判決。另外,平臺的大角度機動勢必會導致陣型嚴重畸變,增加目標丟失的可能性,因此,急需一種小角度機動就能完成左右舷分辨的方法。
本文在深入研究平臺機動時左右舷分辨的基礎上,創(chuàng)新提出了一種以目標跟蹤為基礎的單線陣左右舷分辨方法,通過仿真分析,驗證了該方法的可行性與有效性,可望應用于工程實踐中。
1 單線陣左右舷分辨基本原理
本文采用平臺機動與目標跟蹤相結合的方法,具體流程如圖1 所示。拖曳線列陣聲吶在開機使用過程中發(fā)現(xiàn)過門限的目標,利用過門限的目標數(shù)據(jù),進行左右舷鏡像處理,兩者組成一個左右舷“目標對”,兩者具有相同的幅值和距離值,但是方位不同(例如,平臺航向為0°時,右舷80°方位鏡像到左舷為280°方位),就如同從左右舷兩邊都收到數(shù)據(jù)一樣,然后將“目標對”中的2 個目標分別進行跟蹤處理。平臺按照規(guī)定進行轉向機動,根據(jù)“目標對”中2 個目標速度變化趨勢來判斷左右舷。假設平臺機動過程中能夠檢測到目標并且穩(wěn)定跟蹤,通過一系列周期,真實目標的速度變化不明顯,但鏡像目標的速度將發(fā)生劇烈變化,保留速度變化較小的跟蹤器,從而可以確定目標真實方位,無需人工干預即可實現(xiàn)目標左右舷自動判決。
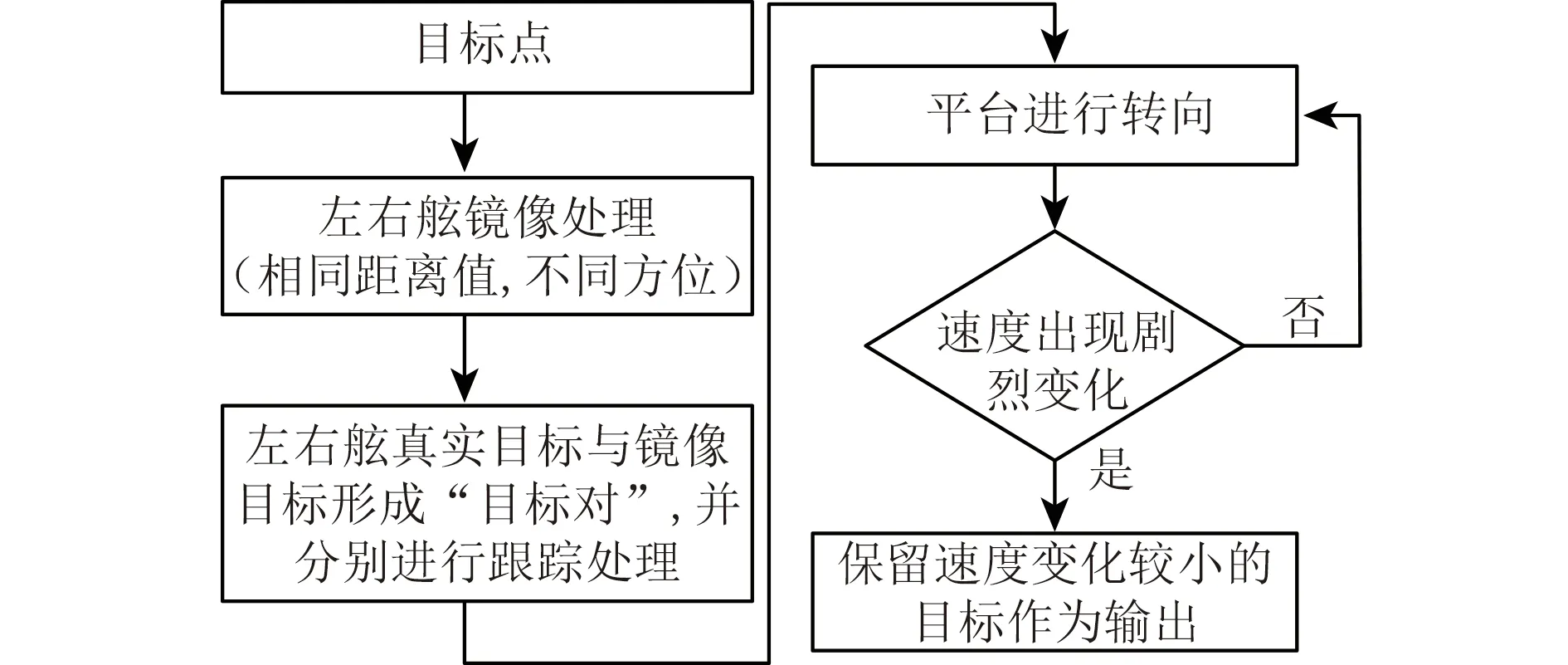
圖1 單線陣左右舷分辨流程Fig.1 Flow chart of port-starboard discrimination of single towed array
2 目標跟蹤算法
為了提高對機動目標的跟蹤能力,本文采用IMMKalman 濾波跟蹤算法。交互多模型(Interactive Multiple Models,IMM)跟蹤算法采用多個運動模型,每個模型都有一個相應的模型概率,通過馬爾科夫轉移矩陣完成不同模型之間的轉換,在運算過程中,系統(tǒng)實時為每個模型計算概率,最終輸出結果為各個模型的加權平均[8–9]。
設有n個模型,目標運動方程為:

其中,j=1,2,···,n;xj(k) 為k時刻狀態(tài)向量;Φj為狀態(tài)轉移矩陣;Wj(k?1)為k-1 時刻過程噪聲;Gj為過程噪聲分布矩陣。
測量方程為:

其中:Hj(k)為測量矩陣;Vj(k)為測量噪聲。
IMM 算法濾波可分為幾步:
1)模型交互作用
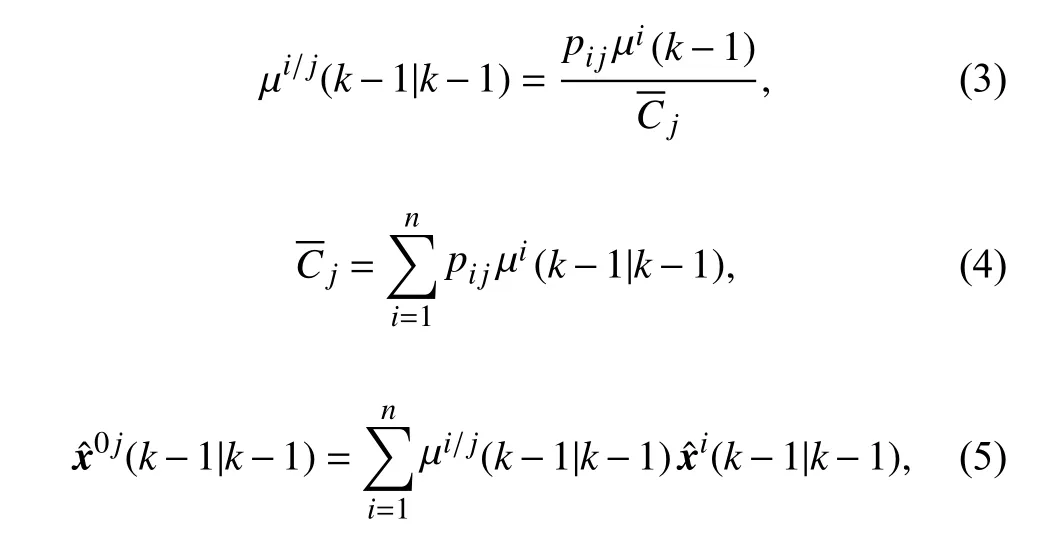
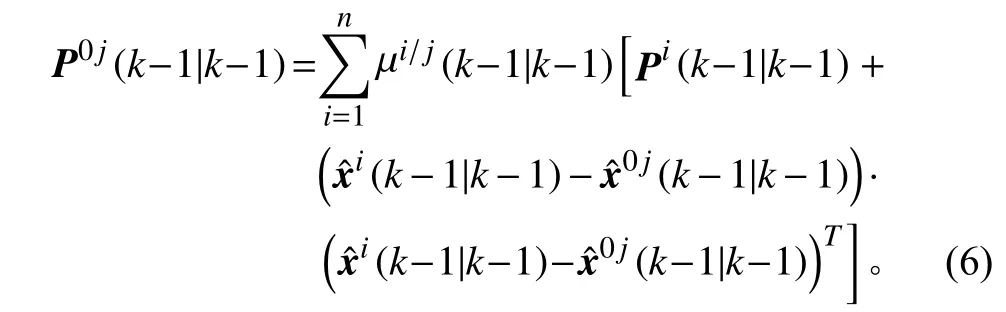
其中:pij為第i個模型到第j個模型的轉移概率;μi(k?1)為第i個模型的概率;為預測的第j個模型k時刻的概率;μi/j(k?1|k?1)為在第j個模型條件下第i個模型k-1 時刻的概率;(k?1|k?1)為第i個模型k-1時刻的狀態(tài)估計;Pi(k?1|k?1)為相應的協(xié)方差;(k?1|k?1)為交互作用下第j個模型k-1 時刻的狀態(tài)估計;P0j(k?1|k?1)為交互作用下第j個模型k-1 時刻的協(xié)方差。
2)模型條件濾波
計算模型的預測濾波狀態(tài)及協(xié)方差:
計算模型的濾波狀態(tài)及協(xié)方差:
其中:νj(k)為第j個模型k時刻的新息(殘差);Sj(k)為第j個模型k時刻殘差的協(xié)方差;Kj(k)為第j個模型k時刻的濾波增益;I為單位矩陣。
3)模型概率更新
計算模型的似然概率:
4)交互模型輸出
3 仿真與結果分析
其中,T為周期,r11=r22=σ2,Zx和Zy為測量值在x軸和y軸上的投影。
在實際情況中,測距與測向都會存在一定測量誤差。為模擬實際情況,在仿真中添加了均方根為1.02%的測距誤差和2.26°的測向誤差,如圖2 所示。總共運動80 個周期,從目標位于左舷與右舷2 種情況進行分析,忽略了平臺小角度機動時陣型畸變的影響,認為陣型畸變不大,依然能夠持續(xù)檢測到目標,保證跟蹤器能進行穩(wěn)定跟蹤。
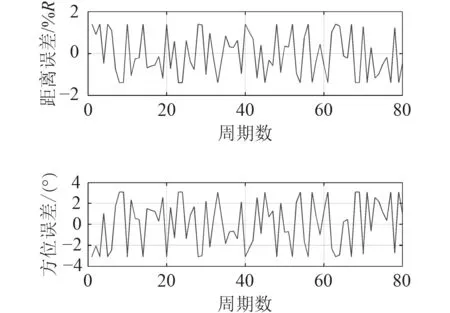
圖2 仿真中添加的測距與測向誤差Fig.2 Measuring errors of range and bearing added in simulation
當目標位于左舷的情況,設置平臺的航向為270°,航速6 m/s,目標方位220°,初始距離20 km,航向220°,航速3 m/s。從6 個周期(T=R/C根據(jù)量程32 km確定)開始轉向5°,然后保持航向不變,真實目標、鏡像目標與平臺位置關系如圖3 所示,兩跟蹤器的速度值輸出如圖4 所示。可見,當目標位于左舷,在平臺機動未進行轉向的時候,兩跟蹤器的速度輸出值完全一樣,速度差為0 m/s,無法區(qū)分左右舷。在平臺機動轉向之后,兩跟蹤器的速度值開始出現(xiàn)差異,真實目標的速度變化不明顯,真實目標速度為3 m/s 左右上下波動,但鏡像目標的速度將發(fā)生劇烈變化,在轉向后的第1 個周期,其目標速度就大于10 m/s,兩者速度的差值已經(jīng)超過測速誤差,根據(jù)兩跟蹤器的速度差異信息,保留速度變化較小的目標,完成左右舷分辨。
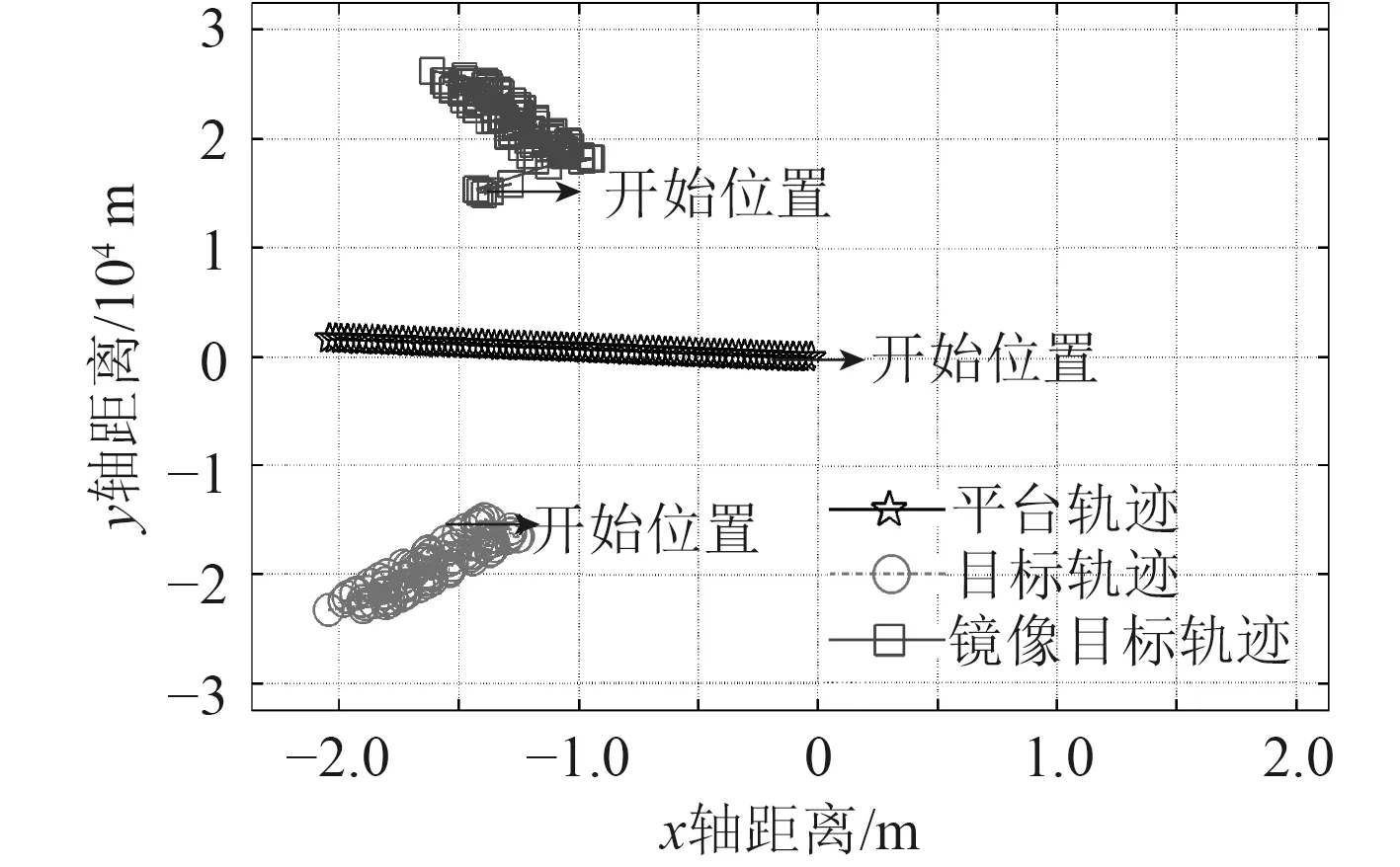
圖3 真實目標、鏡像目標與平臺位置關系(左舷)Fig.3 The location relationship between the real target,mirror target and platform(on the port)
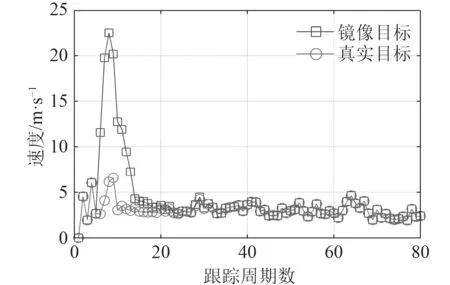
圖4 兩跟蹤器目標速度輸出對比(左舷)Fig.4 The contrast of target velocity between the two trackers(on the port)
當目標位于右舷的情況,平臺的航向為270°,航速6 m/s,目標方位320°,初始距離20 km,航向320°,航速3 m/s。從6 個周期開始轉向5°,然后保持航向不變,真實目標、鏡像目標與平臺位置關系如圖5所示,兩跟蹤器的速度值輸出如圖6 所示。可見,當目標位于右舷,與目標位于左舷的情況類似,在平臺機動未進行轉向的時候,兩跟蹤器的速度輸出值一模一樣,速度差為0 m/s,在平臺機動轉向之后,真實目標速度為3 m/s 左右波動,速度改變不明顯,但鏡像目標在轉向后的第1 個周期,其目標速度就大于10 m/s,其速度變化較大,根據(jù)兩跟蹤器的速度差異信息,保留速度變化較小的目標,同樣可以確定目標真實方位,完成左右舷分辨。
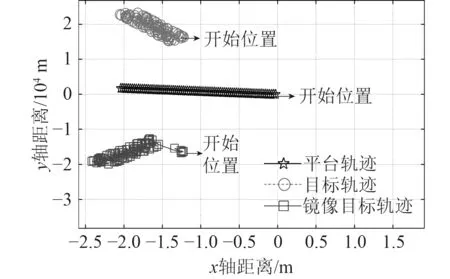
圖5 真實目標、鏡像目標與平臺位置關系(右舷)Fig.5 The location relationship between the real target,mirror target and platform(on the starboard)
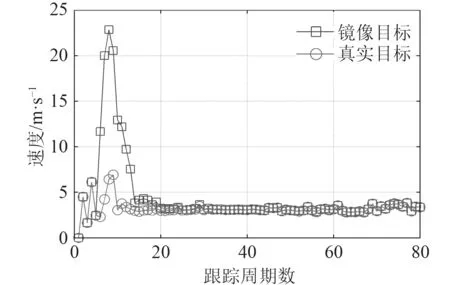
圖6 兩跟蹤器目標速度輸出對比(右舷)Fig.6 The contrast of target velocity between the two trackers(on the starboard)
4 結 語
對于單線陣而言,左右舷分辨是一個重點,也是一個難點。為解決單線陣左右舷模糊問題,本文提出了一種基于目標跟蹤的單線陣左右舷分辨方法,將平臺機動與目標跟蹤相結合,利用跟蹤目標速度差異來分辨左右舷。由仿真結果可知,當目標位于左舷或者右舷,在平臺進行小角度轉向后,比如5°,經(jīng)過2 個掃描周期就可以區(qū)分目標左右舷,驗證了本方法的可行性與有效性,在工程實踐中,具有一定的應用前景與指導意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19