用于肌肉電信號(hào)控制的仿生機(jī)械手設(shè)計(jì)與仿真
2021-08-09 10:27:12劉樂遠(yuǎn)閆炳成黃經(jīng)緯李敏魏德軒
智能計(jì)算機(jī)與應(yīng)用 2021年3期
劉樂遠(yuǎn) 閆炳成 黃經(jīng)緯 李敏 魏德軒


摘 要: 針對(duì)肌肉電信號(hào)(EMG)控制假手的需求,介紹了一種仿生機(jī)械手的設(shè)計(jì)和控制仿真。此機(jī)械手優(yōu)勢(shì)在于關(guān)節(jié)和手指尺寸完全還原真實(shí)人手的大小。首先,在多自由度的基礎(chǔ)上,建立了五指的運(yùn)動(dòng)學(xué)模型并求出其運(yùn)動(dòng)學(xué)正解和逆解。然后,通過仿真來驗(yàn)證其運(yùn)動(dòng)學(xué)解的正確性,從而為仿生機(jī)械手的運(yùn)動(dòng)軌跡規(guī)劃和進(jìn)一步的控制提供了理論依據(jù)。最后,簡要說明了肌肉電信號(hào)如何實(shí)現(xiàn)對(duì)仿生機(jī)械手的運(yùn)動(dòng)控制。
關(guān)鍵詞: 肌電信號(hào); 仿生機(jī)械手; 運(yùn)動(dòng)學(xué); 運(yùn)動(dòng)仿真
文章編號(hào): 2095-2163(2021)03-0048-04 中圖分類號(hào):TP24 文獻(xiàn)標(biāo)志碼:A
【Abstract】Aiming at the demand of electromuscular signal (EMG) to control artificial hand, this paper introduces the design and control simulation of a bionic manipulator. This manipulator is mainly based on the design of fingers and joints, and it can complete a variety of gestures. The advantage is that the size of joints and fingers completely restore the size of real hands. Firstly, the kinematics model of the five fingers is established on the basis of multiple degrees of freedom and the kinematics forward solution and inverse solution are obtained. Then, the correctness of the kinematics solution is verified by simulation, which provides the theoretical basis for the motion trajectory planning and further control of the bionic manipulator. Finally, the paper briefly explains how to realize the motion control of the biomimetic manipulator by muscle electrical signal.
【Key words】 EMG; bionic manipulator; kinematics; motion simulation
0 引 言
隨著科技的進(jìn)步,工業(yè)等方面的機(jī)械化飛速發(fā)展。其中,機(jī)械手的應(yīng)用越來越廣泛。機(jī)械手的分類大致可分為工業(yè)用機(jī)械手和假肢用機(jī)械手。假肢用機(jī)械手又可叫做仿生機(jī)械手[1],近年來國內(nèi)外學(xué)者對(duì)其的研究也日趨深入。如崔鵬等人[2]采用腱傳動(dòng)式仿生機(jī)械手取代了簡單的夾具,提高了末端執(zhí)行器的適應(yīng)性。南卓江等人[3]研發(fā)了一種質(zhì)量輕且具有良好柔順性、靈巧性的仿生機(jī)械手。隨著信號(hào)采集技術(shù)的日益發(fā)展,通過采集到的生物電信號(hào)實(shí)現(xiàn)運(yùn)動(dòng)控制正成為一種趨勢(shì)。如王宏等人[4]提出的一種基于肌肉電信號(hào)控制的假肢用機(jī)械手的設(shè)計(jì),為機(jī)械手控制問題提供了理論依據(jù)。劉帥等人[5]利用ADAMS軟件建立仿生機(jī)械手的虛擬樣機(jī)。李振浩等人[6]通過ADAMS進(jìn)一步對(duì)仿生機(jī)械手進(jìn)行運(yùn)動(dòng)學(xué)仿真分析。呂美鳳等人[7]針對(duì)機(jī)械手運(yùn)動(dòng)過程中的運(yùn)動(dòng)軌跡進(jìn)行了研究分析。而對(duì)于更多自由度的機(jī)械手研究,適合更加復(fù)雜的運(yùn)動(dòng)。侯歆巖[8]對(duì)5R機(jī)械臂進(jìn)行坐標(biāo)建模并確定其連桿參數(shù)。同樣地,周睿等人[9]也對(duì)一種5自由度機(jī)械手進(jìn)行了運(yùn)動(dòng)學(xué)分析。陳珂等人[10]對(duì)六自由度機(jī)械手進(jìn)行了ANSYS靜力學(xué)仿真。王衛(wèi)兵等人[11]對(duì)六軸機(jī)械手進(jìn)行運(yùn)動(dòng)學(xué)分析,并進(jìn)行仿真實(shí)驗(yàn)。仿生機(jī)械手的設(shè)計(jì)和分析,能夠?yàn)楹罄m(xù)的肌電輸入控制做準(zhǔn)備。
1 仿生機(jī)械手結(jié)構(gòu)及參數(shù)
建立仿生機(jī)械手的模型,拇指具有2個(gè)關(guān)節(jié),食指、中指、無名指、小指都具有3個(gè)關(guān)節(jié)。因此,在solidworks中的機(jī)械手模型具有14個(gè)自由度。機(jī)械手結(jié)構(gòu)簡圖如圖1所示,除拇指外其余四指均含有3個(gè)臂,拇指含有2個(gè)臂 ,以手掌對(duì)稱軸與拇指軸線相交處建立機(jī)械手的世界坐標(biāo)系xyz。
在圖1中,a、b、c分別為20.785 mm、12.5 mm、39.131 5 mm,a為關(guān)節(jié)Oi在x方向距離世界坐標(biāo)系的距離,b為四指間距離。具體參數(shù)見表1。
2 運(yùn)動(dòng)學(xué)分析
由于除拇指外其余四指的運(yùn)動(dòng)學(xué)具有相似性,因此先對(duì)四指進(jìn)行運(yùn)動(dòng)學(xué)分析。利用圖1機(jī)械手在H方向視圖,可將四指簡化為如圖2所示的結(jié)構(gòu),其中Oi(i=1~4)分別為四指與手掌的連接的關(guān)節(jié),角度為θi1(i=1~4),Ai和Bi(i=1~4)分別為四指中間的兩關(guān)節(jié),角度分別為θi2和θi3(i=1~4),Ci(i=1~4)分別為四指的指尖,以各個(gè)關(guān)節(jié)及指尖分別建立坐標(biāo)系,如圖2所示。
通過D-H參數(shù)計(jì)算方法獲得機(jī)械手四指D-H參數(shù)表,見表2。
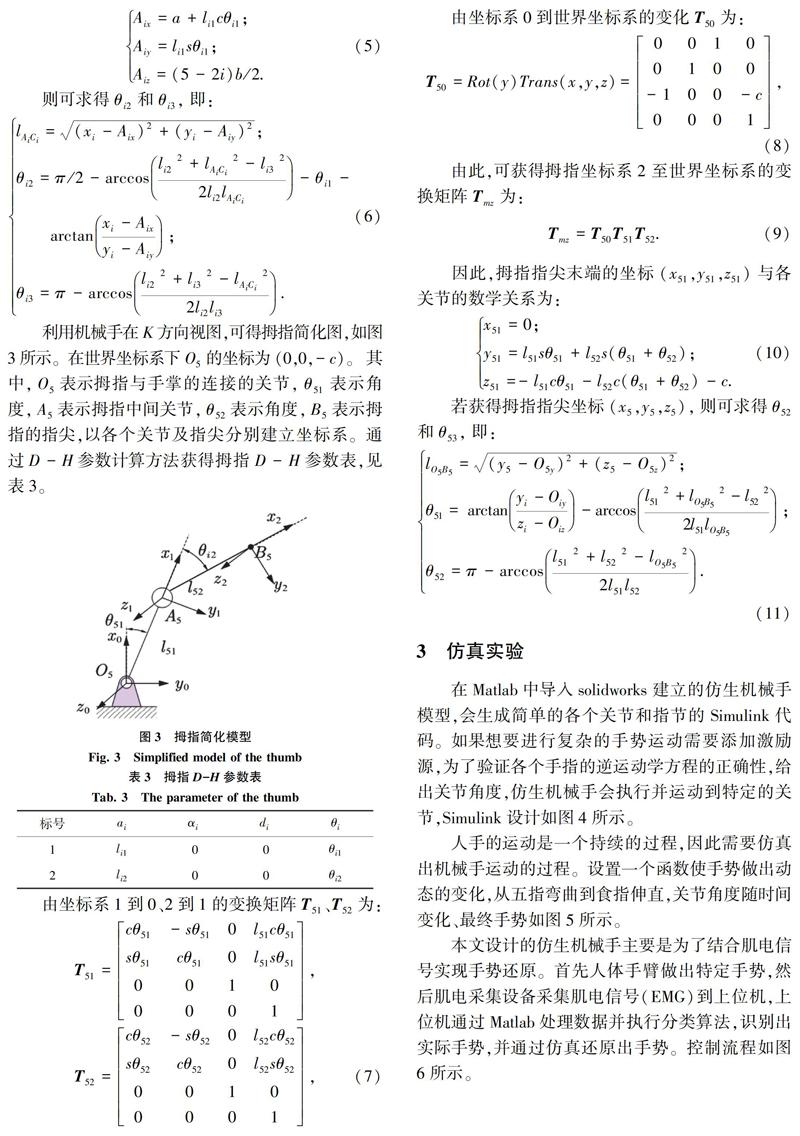
利用機(jī)械手在K方向視圖,可得拇指簡化圖,如圖3所示。在世界坐標(biāo)系下O5的坐標(biāo)為(0,0,-c)。其中,O5表示拇指與手掌的連接的關(guān)節(jié),θ51表示角度,A5表示拇指中間關(guān)節(jié),θ52表示角度,B5表示拇指的指尖,以各個(gè)關(guān)節(jié)及指尖分別建立坐標(biāo)系。通過D-H參數(shù)計(jì)算方法獲得拇指D-H參數(shù)表,見表3。
3 仿真實(shí)驗(yàn)
在Matlab中導(dǎo)入solidworks建立的仿生機(jī)械手模型,會(huì)生成簡單的各個(gè)關(guān)節(jié)和指節(jié)的Simulink代碼。如果想要進(jìn)行復(fù)雜的手勢(shì)運(yùn)動(dòng)需要添加激勵(lì)源,為了驗(yàn)證各個(gè)手指的逆運(yùn)動(dòng)學(xué)方程的正確性,給出關(guān)節(jié)角度,仿生機(jī)械手會(huì)執(zhí)行并運(yùn)動(dòng)到特定的關(guān)節(jié),Simulink設(shè)計(jì)如圖4所示。
人手的運(yùn)動(dòng)是一個(gè)持續(xù)的過程,因此需要仿真出機(jī)械手運(yùn)動(dòng)的過程。設(shè)置一個(gè)函數(shù)使手勢(shì)做出動(dòng)態(tài)的變化,從五指彎曲到食指伸直,關(guān)節(jié)角度隨時(shí)間變化、最終手勢(shì)如圖5所示。
本文設(shè)計(jì)的仿生機(jī)械手主要是為了結(jié)合肌電信號(hào)實(shí)現(xiàn)手勢(shì)還原。首先人體手臂做出特定手勢(shì),然后肌電采集設(shè)備采集肌電信號(hào)(EMG)到上位機(jī),上位機(jī)通過Matlab處理數(shù)據(jù)并執(zhí)行分類算法,識(shí)別出實(shí)際手勢(shì),并通過仿真還原出手勢(shì)。控制流程如圖6所示。
4 結(jié)束語
本研究以肌電控制假手的需求為背景,設(shè)計(jì)了一種多自由度仿生機(jī)械手,并進(jìn)行了運(yùn)動(dòng)學(xué)分析和動(dòng)態(tài)仿真。首先,參照實(shí)際人手設(shè)計(jì)出一種14自由度的機(jī)械手,并設(shè)置好各個(gè)關(guān)節(jié)參考坐標(biāo)系,對(duì)每個(gè)手指進(jìn)行正逆運(yùn)動(dòng)學(xué)分析。然后,為了方便肌電信號(hào)的數(shù)據(jù)處理和接口對(duì)接,采用Matlab對(duì)仿生機(jī)械手進(jìn)行導(dǎo)入和仿真設(shè)計(jì),實(shí)現(xiàn)了機(jī)械手的仿真模型建立和手勢(shì)控制。最后,給出實(shí)際信號(hào)如何控制機(jī)械臂仿真模型的流程,為后續(xù)肌肉電信號(hào)控制仿生機(jī)械臂提供了充足的理論和實(shí)驗(yàn)準(zhǔn)備。
參考文獻(xiàn)
[1]CUI Yujie,HUA Jianning. Kinematics analysis and simulation of a 4-DOF manipulator[J]. Applied Mechanics and Materials,2011,44-47:656-660.
[2] 崔鵬,陳志,張小超. 蘋果采摘機(jī)器人仿生機(jī)械手靜力學(xué)分析與仿真[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2011,42(2):149-153.
[3] 南卓江,楊揚(yáng),鈴森康一,等. 基于細(xì)徑McKibben型氣動(dòng)人工肌肉的仿生手研發(fā)[J]. 機(jī)器人,2018,40(3):321-328.
[4] 王宏,姬彥巧,趙長寬,等. 基于肌肉電信號(hào)控制的假肢用機(jī)械手的設(shè)計(jì)[J]. 東北大學(xué)學(xué)報(bào),2006,27(9):1018-1021.
[5] 劉帥,孟巖. 仿生機(jī)械手的設(shè)計(jì)與仿真分析[J]. 現(xiàn)代制造技術(shù)與裝備,2019(12):70-72.
[6] 李振浩,管聲啟,肖旭,等. 一種新型的仿生機(jī)械手結(jié)構(gòu)設(shè)計(jì)與運(yùn)動(dòng)學(xué)仿真[J]. 西安工程大學(xué)學(xué)報(bào),2020,34(5):56-62.
[7] 呂美鳳,錢瑋. 基于MATLAB的六自由度機(jī)械手的運(yùn)動(dòng)分析與仿真[J]. 農(nóng)業(yè)裝備與車輛工程,2018,56(7):67-69.
[8] 侯歆巖. 五自由度機(jī)械手運(yùn)動(dòng)學(xué)分析與仿真研究[J]. 黑龍江科學(xué),2020,11(16):28-29.
[9] 周睿,李淑穎,汪義博,等. 一種5自由度機(jī)械手的運(yùn)動(dòng)學(xué)分析[J]. 工具技術(shù),2020,54(8):45-49.
[10]陳珂,馮卓群,楊俊,等. 一種六自由度機(jī)械手的結(jié)構(gòu)設(shè)計(jì)[J]. 機(jī)械制造與自動(dòng)化,2020,49(1):138-140.
[11]王衛(wèi)兵,張霽,徐倩. 一種六軸焊接機(jī)械手運(yùn)動(dòng)學(xué)分析[J]. 哈爾濱理工大學(xué)學(xué)報(bào),2019,24(6):125-131.
