海洋監測下半潛式無人艇的自適應滑模艏向控制
2021-08-07 05:48:40吳迪胡高令魯興益葉杰民張麗珍
全球定位系統 2021年3期
吳迪,胡高令,魯興益,葉杰民,張麗珍
(上海海洋大學 工程學院,上海 201306)
0 引 言
海洋監測技術是涉及機械、電子、能源、材料、信息等多學科的交叉技術,對海洋環境進行監測在軍事與民用方面都有著重要意義[1].近年來,隨著我國構建海洋命運共同體等海洋強國戰略的實施,海洋監測技術在海洋領域得到廣泛的應用.蔡陳玉[2]基于北斗衛星導航系統(BDS)開發了船舶監控系統,實現了對船舶的位置以及航行信息的實時監控.姜少杰等[3]開發了一種基于GPS 的自動巡航功能的水質監測船,實現了對海洋牧場生態環境的實時遠程監測.王永鼎等[4]基于BDS 系統對水下無人潛水器水下巡航作業進行了應用研究,試驗表明應用運行情況平穩.崔秀芳等[5]設計了一種基于BDS 的水下作業仿生魚控制系統,實現了對水質的遠程監測.海洋測量裝備包括天基、空基、岸基、海基、潛基五類作業平臺[6].其中,由于海基水面以上體積大容易遭受風浪影響,穩定性差.潛基位于水面以下,雖然規避了風浪沖擊和影響,但通訊受阻,測量數據往往不能同步傳輸.在文獻[2]~文獻[5]中,為了完成監測任務,海洋測量裝備都是在單一的導航模式下進行的定點路線巡航,但巡航過程中需要調整艏向獲取附近水域的水面狀況,并且海洋裝備的選取也在一定程度上限制了導航在實際監測中的應用.基于此狀,依托上海市科學技術委員會科研計劃項目,由上海海洋大學張麗珍項目組研制的一種新型半潛式無人艇,通信控制部分位于水面以上,主體位于水面以下,穩定性和通訊大大提高,兼顧了海基和潛基的特點,進一步利用GPS/BDS雙模導航和電子羅盤可使半潛式無人艇在海洋環境下高精度導航定位的同時滿足艏向精度.考慮到半潛式無人艇在路線巡航過程中艇體的吃水線變化會引起水動力參數攝動,同時存在海洋環境干擾,容易造成艏向不穩定而影響監測作業.因此,對半潛式無人艇的艏向控制提出了更高的要求,艏向控制器應具有一定的適應性和魯棒性以滿足這一要求.目前,大量的控制方法應用于大型舵-槳船舶的艏向控制中,例如比例積分微分(PID)控制[7]、反步控制[8]、神經網絡控制[9]、模糊控制[10]等方法.滑模控制(SMC)是前蘇聯學者于20 世紀50 年代提出的,至今理論發展成熟,已在各個領域中得到廣泛應用[11].滑模控制最大的優點是對環境干擾具有強魯棒性,因此非常適用于半潛式無人艇的在海洋監測的艏向控制.但是,艏向調整不可避免地會帶動參數攝動,所以引入自適應控制在線估計系統未知參數,同時減小SMC 本身的抖振問題的影響.本文首先對半潛式無人艇的海洋監測功能實現進行了闡述,然后在建立半潛式無人艇艏向動態響應模型的基礎上,將SMC 與自適應控制相結合設計自適應滑模控制(ASMC)方法,并與傳統的比例微分(PD)控制進行計算機仿真對比.最后,將設計的ASMC 方法應用于半潛式無人艇,并分別在上海海洋大學校內湖和上海奉賢近海區進行了兩次實地監測.數值仿真和試驗結果均表明設計的ASMC 方法具有良好的控制性能,滿足海洋監測的連續性要求.
1 半潛式無人艇的介紹
1.1 半潛式無人艇的功能實現
本項目組基于模塊化思想自主研發的半潛式無人艇[12]如圖1 所示.該半潛式無人艇是由一個浮體和兩個艇體組成的雙體結構,浮體內裝有控制模塊、驅動模塊、導航定位模塊、信息采集模塊和板卡等,并通過密封支撐架內部導線與其他外圍設備聯通,左右艇體艉部對稱裝備兩個螺旋槳,艇長1.59 m,艇寬0.76 m,艇高1.06 m,螺旋槳直徑0.09 m,螺旋槳最大功率為80 W,航行速度約1 m/s.浮體和艇體分別配置監控器和多參數水質傳感器,用以實時采集和傳輸水面監控信息和水質參數,并在移動上位機平臺實時顯示.為了能夠接收到良好的衛星信號和降低設備間電磁干擾以提高定向精度,將兩個電子羅盤在浮體尾線用支架置于最高處.GPS/BDS 和兩個電子羅盤將接收到的位置和艏向信息傳輸到控制器中,控制器對兩個螺旋槳電機產生控制信號來實現半潛式無人艇的運動控制.
1.2 半潛式無人艇運動模型
為描述半潛式無人艇水面上的三自由度運動,建立大地坐標系和艇體坐標系,原點選為半潛式無人艇的重心處,x軸平行于艇體,指向艇艏;y軸與x軸垂直,指向右艇體,如圖2 所示.假設半潛式無人艇的質量分布均勻、左右對稱,根據Fossen 學者的研究理論[13]和日本學派的分離型模型(MMG)研究方法[14],建立半潛式無人艇的三自由度低頻運動模型為

圖2 半潛式無人艇運動模型

半潛式無人艇是直流電機驅動固定雙槳的無舵艇型,而傳統船舶是通過舵-槳來控制運動的.兩者在推進器結構上有著顯著的差異,因此,推進方式有著根
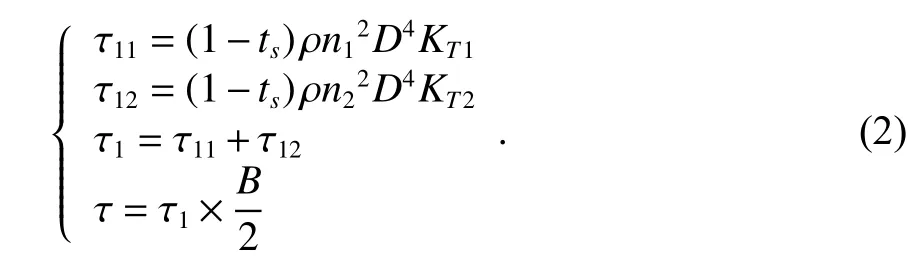
式中:ρ 為水密度;τ11和 τ12分別為半潛式無人艇左右螺旋槳產生的槳軸向方向的推力;n1和n2分別為左右兩側螺旋槳轉速;ts為常規推力減額系數;D為螺旋槳直徑;KT1和KT2為左右螺旋槳推力系數;B為兩艇體中心線的距離;τ1為半潛式無人艇推力和,其中由兩側螺旋槳差速轉動形成轉艏力矩 τ 來改變艏向,關系式[16]為

式中:c2為控制增益;Δ=n1?n2為左右螺旋槳轉速.
為了研究半潛式無人艇的艏向控制效果,基于半潛式無人艇運動模型并僅考慮半潛式無人艇的橫蕩和艏搖運動,根據文獻[17]~文獻[19]對雙槳推進船運動學和動力學推導并結合半潛式無人艇的工作特點,得到半潛式無人艇艏向角動態響應仿真模型為

式中,c1為半潛式無人艇依賴于流體動力學系數的未知參數.在形式上半潛式無人艇與常規舵-槳作用船舶的艏搖運動響應模型是一致的,是從舵-槳船舶的運動模型上擴展而來的,可以看作是野本謙作學者的著名一階KT 方程[20]在固定雙槳的無舵艇上的推廣.區別在于操縱艏搖運動的控制量是雙螺旋槳轉速產生的作用力而不是舵力.
由于半潛式無人艇艇體位于水面以下,現僅考慮波浪干擾對浮體的影響,波浪對浮體產生的干擾力矩為
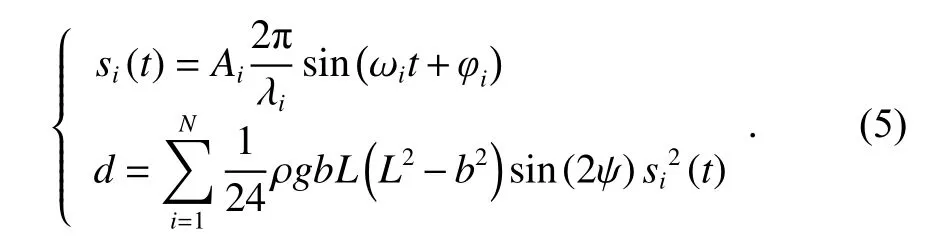
式中:si為波頻;Ai為波幅;λi為波長;ωi為頻率;φi為相位;L為浮體長度;b為浮體寬度.
2 控制器設計和穩定性分析
2.1 自適應滑模艏向控制設計
ASMC 原理圖如圖3 所示,圖中ψd為艏向角期望值;ψ 是通過求解兩個天線在大地坐標系中的相對位置測量的實際艏向角;Δψ 為實際艏向角與艏向角期望值的角度誤差,自適應律利用實際艏向角以及其角速度在線估計系統模型參數值,然后滑模控制律以當前角度誤差作為輸入,結合估計后的參數計算出半潛式無人艇左右螺旋槳電機的轉速差,實現艏向跟蹤控制.
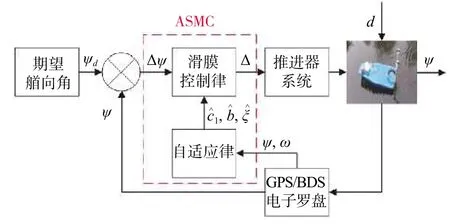
圖3 ASMC 結構圖
定義艏向跟蹤誤差為

在艏向控制中,系統狀態高頻切換滑模面時會產生大階躍響應,為了改善趨近運動的動態控制,引入指數趨近律

式中:ε >0;k>0.增大k同時減小 ε,系統狀態能以較大的速度趨近滑動模態,則控制輸入為

式中,無須對c2直接進行估計而引入參數b=1/c2,避免了在設計過程中出現的奇異值.
為實現高精度系統建模,需要通過在線估計系統未知參數c1、b、ξ以降低參數不確定性對建模的影響,引入參數自適應律為

式中:k1、k2、k3為正參數;分別為c1、b、ξ 的估計值.
式(13)中魯棒項 ξsgn(s) 能夠克服干擾的影響,但符號函數 sgn()易引起不良的抖振甚至損壞電機,故采用飽和函數 sat(s) 代替符號函數sgn(·)來減少抖振.

式(15)中,φ為邊界層.
綜上,設計的ASMC 方法為

至此,完成了ASMC 方法的設計.
2.2 系統的穩定性分析
采用Lyapunov 定理和Barbalat 引理[21]對系統進行穩定性分析.
定理:考慮具有滑模面式(8)的艏向控制系統式(4),信號可以驅動到滑模面limt→∞s(t)=0 上,艏向跟蹤誤差根據控制律式(13)和自適應律式(14)可以收斂到零.
選取Lyapunov 函數如下:
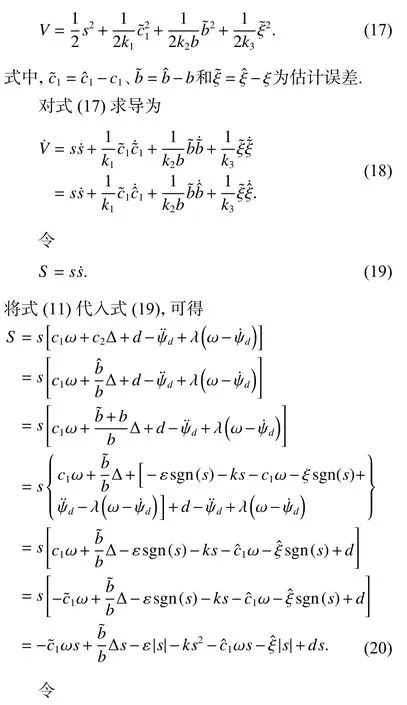

將式(14)的自適應律代入式(21),可得

則結合式(13)的控制律和式(14)的自適應律,可得
3 仿真研究及結果分析
3.1 仿真參數設置
為了驗證本文設計的ASMC 方法的控制性能,以本項目組研發的半潛式無人艇為研究對象與傳統PD 控制進行仿真對比實驗,半潛式無人艇參數如表1所示.

表1 半潛式無人艇的參數
使用數值計算軟件的得到半潛式無人艇的慣性矩陣為
3.2 仿真結果分析
仿真試驗結果如圖4~7 所示.圖4(a)~(b)分別為艏向角和艏向角速度跟蹤曲線,圖5(a)~(b)分別為艏向角和艏向角速度對應的誤差曲線.由圖4 和圖5 可知,自適應滑模控制器能使半潛式無人艇艏向漸近穩定跟蹤期望曲線,由于初始狀態與參考軌跡之間有較大初始偏差,啟動階段有較大的跟蹤誤差,而PD 控制初始跟蹤波動大,超調量過大,且存在穩態誤差,無法獲得高精度控制效果.圖6(a)~(c)分別為c1、b、ρ 參數估計曲線,由圖6 可知,參數估計在1.5 s時就收斂到較小常值且均是有界的,對未知參數具有良好的適應性.圖7 為控制輸入曲線,控制輸入為左右兩螺旋槳的轉速差,由圖7 可知,初始時PD 控制器對參數的攝動和外部干擾的抵抗力較弱,在不確定性的影響下出現震蕩現象,能耗增大,對螺旋槳的磨損較大;ASMC 輸入平緩,對外界時變擾動和模型不確定性具有良好的魯棒性和自適應性.
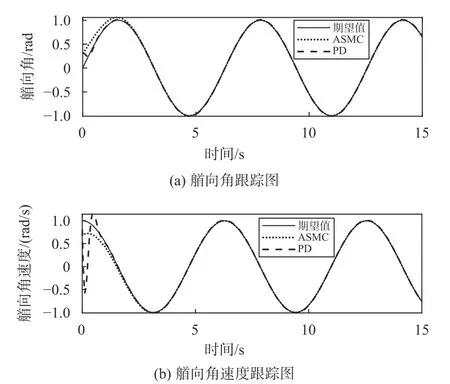
圖4 艏向跟蹤圖
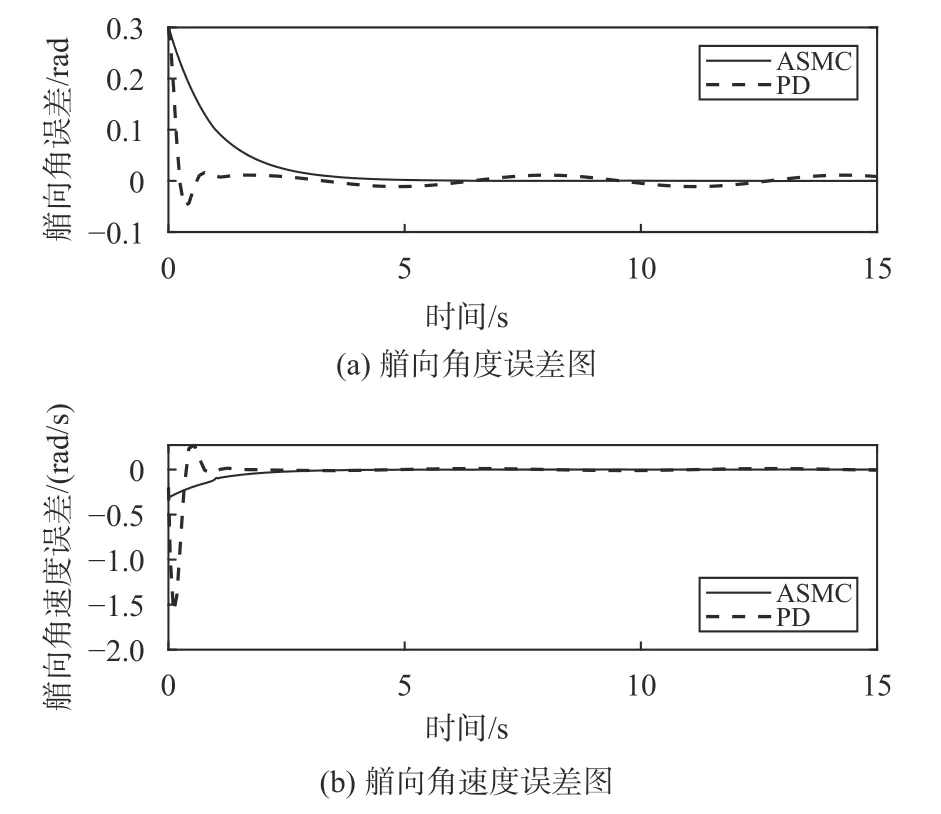
圖5 艏向跟蹤誤差圖

圖6 系統參數估計圖
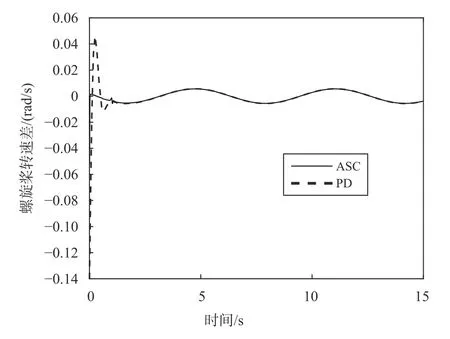
圖7 控制輸入
4 試驗測試
為了驗證設計控制器的實際效果,分別進行了兩次實地海洋監測,如圖8 所示.半潛式無人艇控制器需要豐富的外設接口以及強大的數據處理能力來實現艏向監測功能,因此,使用ST 公司STM32 系列中的STM32F103VC 作為控制主板芯片;采用GPS/BDS的組合導航作為定位系統,導航精度最高可達到0.5 m;選用邁科公司電子羅盤測量艏向角度,精確度為0.3°~0.5°.并于2019 年4 月7 日傍晚在上海海洋大學內湖進行了第一次試驗,監測內容是水面監控,試驗時環境狀況如表2 所示.2019 年8 月14 日上午在上海奉賢東海近海區進行了第二次試驗,除水面監控外增加了水質監測,環境狀況如表3 所示.

表2 湖試環境參數

表3 海試環境參數

圖8 實地試驗圖
兩次測試方法基本相同,現以圖8(a)為例并結合海試進行測試說明.通過谷歌地圖定位到上海海洋大學內湖,并添加湖內地標設定導航定位點,如圖9(a)所示.將數傳電臺外接電源,通過RS232 通訊串口與筆記本電腦連接,筆記本電腦USB 接口連接上COM2接口并與友善串口連接.將湖內地標經緯度按照$g,1,1,121.891071&;$g,1,2,30.885471&坐標表示形式在友善串口助手中輸入,并通過數傳電臺發送給半潛式無人艇,如圖9(b)所示.接收到發送的定位點指令后,半潛式無人艇在標號1 處初始化運行一個導航C 程序,以標號1-2-3-4-5 路線依次巡航,并在各標號處使用設計的控制器進行艏向監測,至標號5 處結束.
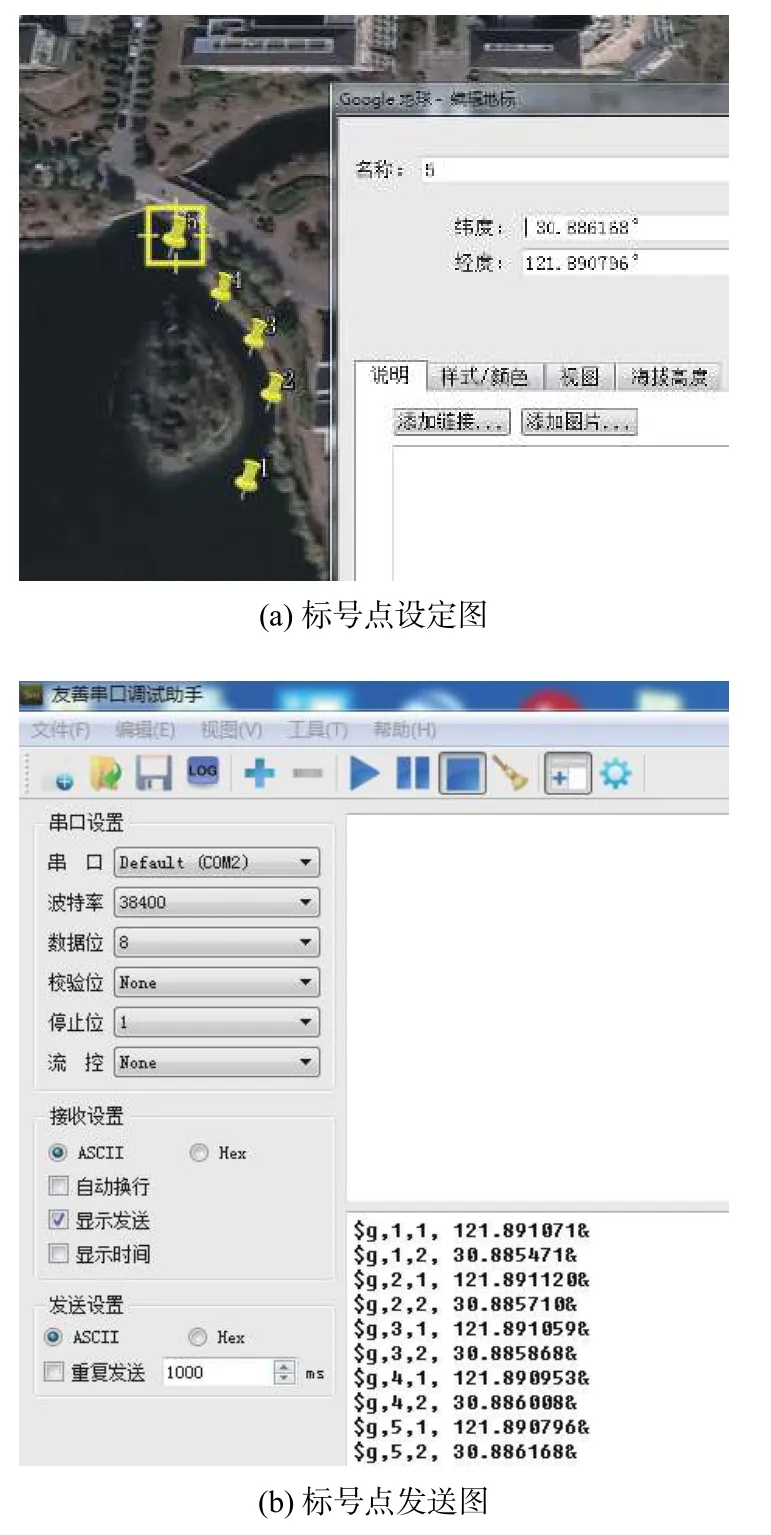
圖9 導航設置圖
如圖10(a)所示,試驗當天的實際環境包括風速、浪高、流速等主要參數,海況等級為2 級,同時進行了兩次試驗,根據這兩次試驗得出,抗干擾能力是抗2 級海況.由于試驗次數限制,未能得出最大干擾強度,目前試驗表明,抗干擾能力為可抗0~2 級海況.通過實際觀察可知,半潛式無人艇在一定程度風浪干擾下仍然能執行360°全回轉艏向運動,表現出良好的抗干擾能力.監控終端收到的湖試和海試信息如圖10(b)、(c)所示,對監測信息進行歸納分析,監控畫面平滑過渡,無突變現象,說明半潛式無人艇艏向控制穩定.如圖11 所示,半潛式無人艇搭載的多參數水質傳感器實現了對現場水質PH、水溫、溶解氧等參數進行實時同步監測,并繪制水質參數圖,驗證了控制系統運行良好.


圖10 試驗監測圖
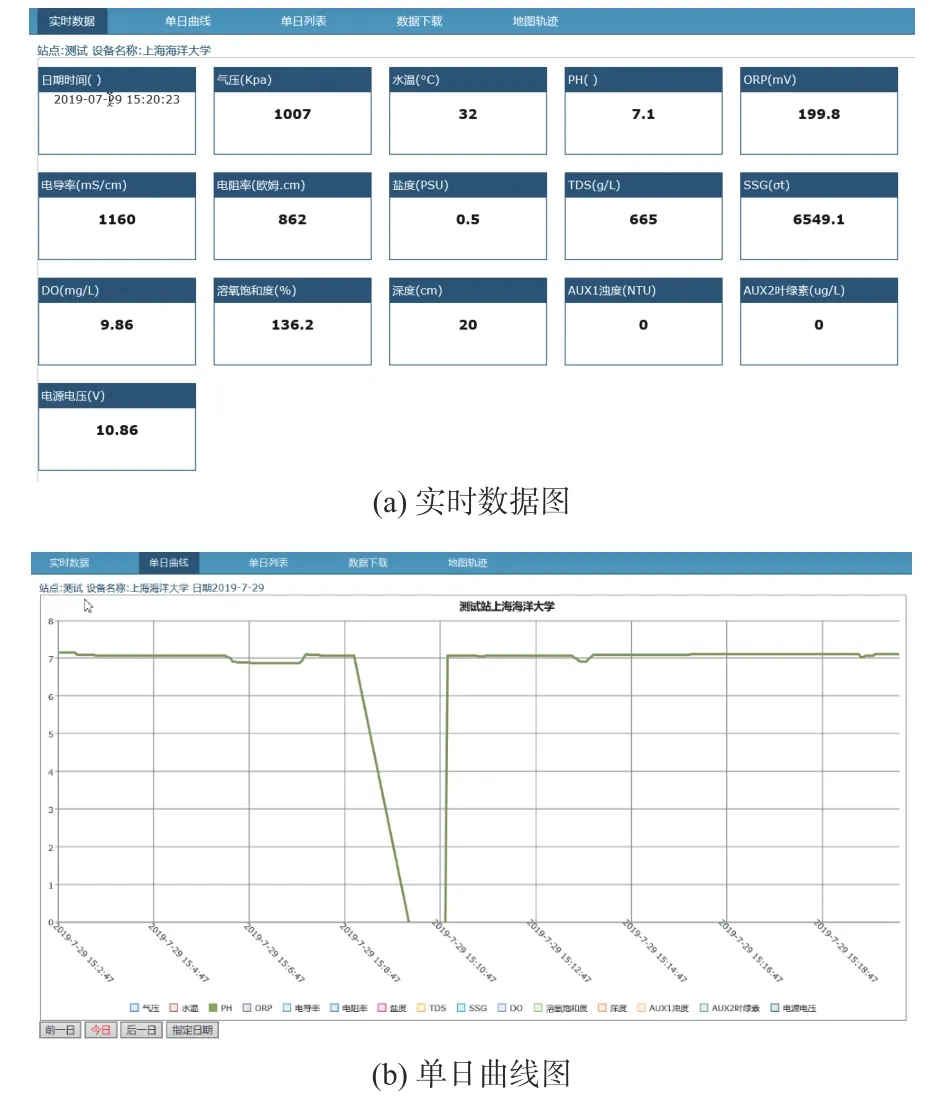
圖11 水質監測圖
5 結論與展望
為了滿足海洋環境監測對半潛式無人艇的艏向控制連續性和穩定性的要求,本文對半潛式無人艇的艏向控制進行了研究與測試,得出以下結論與展望:
1)對于半潛式無人艇路線巡航過程艏向控制問題,將非線性水動力系數作為模型未知不確定項,為避免不確定項趨于無窮,采用SMC 并引入自適應律估計不確定參數,使不確定參數隨著誤差的減小逐漸趨于一個上界,克服了參數變化對系統穩定性的影響,且有效減少了SMC 中存在的抖振現象.理論和試驗仿真都證明了系統的穩定性,對環境擾動具有良好的魯棒性.
2)半潛式無人艇通過GPS/BDS 的組合導航技術到達指定水域并采用設計的控制器進行艏向水面監控和水質監測等海洋監測功能,有效地減少風浪的影響,具有良好的海洋環境適應能力,初步實現了半潛式無人艇的艏向控制,對未來發展海面無人測量系統存在的自動控制問題有一定的參考意義.此外,進一步研究半潛式無人艇在軍用和民用的海洋環境監測技術將有廣泛的應用前景.
