智能控制在罩式爐系統(tǒng)優(yōu)化策略研究
2021-08-04 01:58:36金風濤
數(shù)字通信世界 2021年7期
金風濤
(甘肅鋼鐵職業(yè)技術(shù)學院,甘肅 嘉峪關(guān) 735100)
1 神經(jīng)網(wǎng)絡(luò)
復雜神經(jīng)網(wǎng)絡(luò)體系基于不同框架、模塊以及運行模式下,對目標進行智能化運算的過程,其特定是智能化程度高、選擇適用性高,在各大工業(yè)體系均具有廣泛的應用。本文基于神經(jīng)網(wǎng)絡(luò)來優(yōu)化預測函數(shù),以希在智能化預測模型下實現(xiàn)對系統(tǒng)過程的智能化控制和調(diào)控。
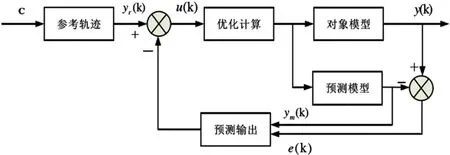
圖1 預測函數(shù)控制原理圖
在預測函數(shù)模型中,MAC、DMC、GPC均具有良好的發(fā)展前景,但在罩式爐溫度控制體系中,由于動態(tài)閾值區(qū)域較大,非線性峰值浮動不定,造成在溫度控制中無法實時對參量控制,罩式爐環(huán)境參考無法實現(xiàn)精確控制,神經(jīng)網(wǎng)絡(luò)和預測函數(shù)模型的應運而生,通過基于控制模型構(gòu)建環(huán)境變量模型,實現(xiàn)溫度控制的精準控制,此外并入反饋模型還可實現(xiàn)參量的動態(tài)控制,實現(xiàn)模型的全域控制。
2 溫度控制方式
PID(Proportion Integration Differentiation)作為一種前沿的調(diào)控方式,在各行各業(yè)均具有發(fā)展前景,目前主流市場上的主要有P.PI.PD以及PID,控制方式和模型具體如圖2所示。
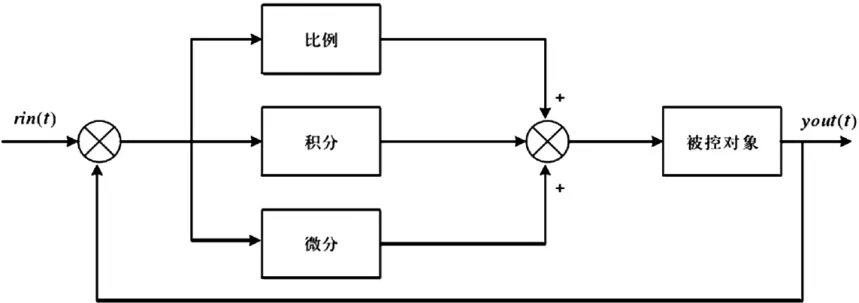
圖2 PID控制系統(tǒng)的結(jié)構(gòu)圖
由圖2可以看出,控制回路主要包括2大部分,其一是控制目標,其二是控制模型。通過控制系統(tǒng)的輸入、輸出參量來實現(xiàn)過程的反饋調(diào)節(jié)。
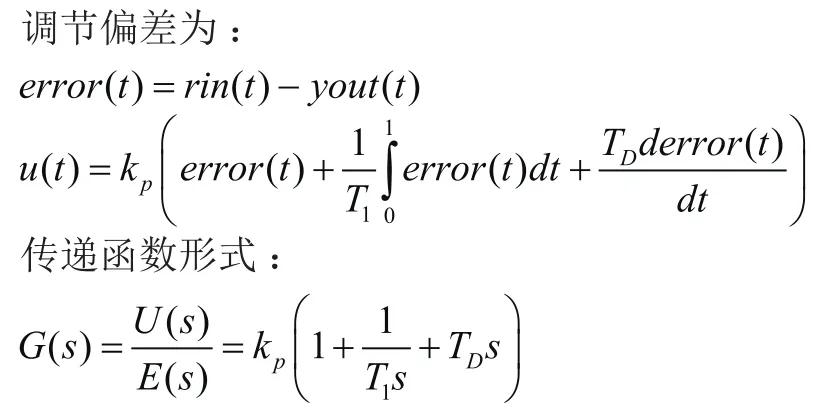
式中,KP為比例系數(shù);T1為積分時間常數(shù);TD為微分時間常數(shù)。
受傳統(tǒng)的PID控制算法的影響,參量模型會隨著環(huán)境變量發(fā)生改變,無法實現(xiàn)對過程控制的全域控制和反饋干擾,為提高系統(tǒng)的自適應性,提高系統(tǒng)在非線性環(huán)境下系統(tǒng)的調(diào)節(jié)精度和反饋波長。
本文基于罩式爐燃燒體系中溫度參數(shù)調(diào)控模型,由于受參量影響較大,環(huán)境干擾因素較多,模擬參量、動態(tài)時域波動較大,為提高系統(tǒng)適用性、反饋精度和控制參量的時效性,現(xiàn)有控制體系無法實現(xiàn)對模擬參量的實時干預和環(huán)境變量模型的構(gòu)建,基于神經(jīng)網(wǎng)絡(luò)體系構(gòu)建預測函數(shù),實現(xiàn)時域閾值、環(huán)境變量的實時干預控制。
3 預測模型構(gòu)建
系統(tǒng)預測函數(shù)模型的建立是系統(tǒng)調(diào)控中必不可少的一個環(huán)節(jié),因此建立不同的模型會有不同的預測性能。因此可以通過現(xiàn)有的數(shù)據(jù)信息來進一步預測系統(tǒng)預期數(shù)據(jù)的輸出。而此時的預測模型在系統(tǒng)的框架上毫無任何約束,僅僅惟一的不同就在于使用途徑上的不同,因此借助此功能賦予的模型特性就可以極大的增大系統(tǒng)評估的深度和寬度,這是以往簡單數(shù)學模型所不及之處。
預測函數(shù)控制預測模型包括:
ym(k)的輸出自由項;yL(k)零輸入響應和強迫項yF(k)零狀態(tài)響應組成,具體如下式所示。

3.1 反饋矯正
調(diào)節(jié)體系的響應修正,主要借助預測輸出和實際輸出形成一個誤差校正值,其主要的原因是,在實際的應用中往往存在一些不能調(diào)控的參數(shù)和因子以及需要再次輸入的參數(shù)值,造成實際輸出之間會存在一個誤差校正值;為了使得此校正值處于系統(tǒng)可接受之內(nèi),因此系統(tǒng)需要對其進行適當?shù)脑u估。
式中,e(k+i)為過程與預測模型的預測誤差,其為k時的誤差與修正誤差組成。
3.2 滾動優(yōu)化
滾動優(yōu)化是為了實現(xiàn)在優(yōu)化時域H系統(tǒng)的輸出和標準軌跡的平方和最小即式3-6、式3-7所示。
式中,nH擬合點數(shù);(nn>nB);yP(k+i)是過程輸出預測;ym(k+i)是k+i時刻模型輸出;e(k+i)e為將來誤差。
4 預測函數(shù)控制算法
5 預測函數(shù)控制結(jié)構(gòu)
預測函數(shù)調(diào)控框架大體包括以下幾個部分。其中預測函數(shù)中最主要的部分是基函數(shù)的選擇、特定模型的規(guī)劃以及相關(guān)控制器的部署和誤差的校正和優(yōu)化等,而本文主要是在鍋爐燃燒系統(tǒng)的基礎(chǔ)下建立的溫度調(diào)控系統(tǒng),其控制的結(jié)構(gòu)形式如下圖所示。
如上圖3所示串級框架,W2(s)與W1(s)由于具有不同的屬性而分別加以研究和討論,將其劃分為導前區(qū)和惰性區(qū)。系統(tǒng)主要的輸入?yún)?shù)為減溫閥門的調(diào)控量u,輸出參數(shù)為此時系統(tǒng)的燃燒溫度,為了使得預測效果達到最佳,需將圖中虛線中的傳遞路線劃為一個整個加以考慮。
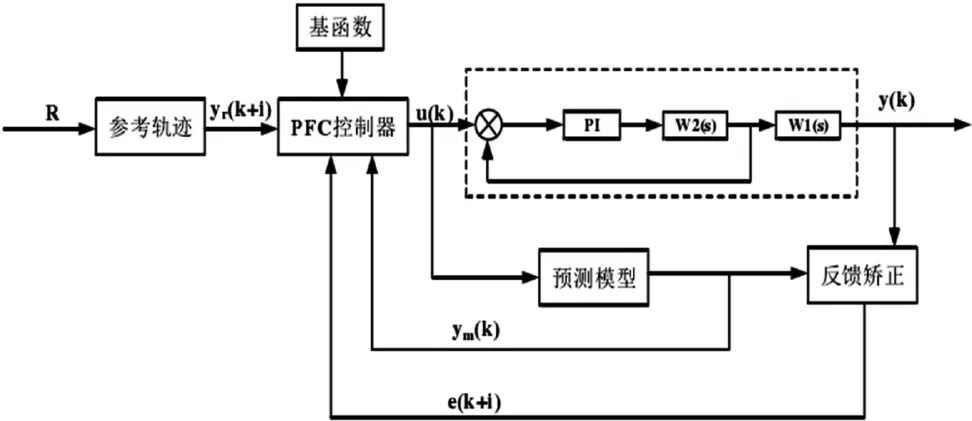
圖3 燃燒溫度預測函數(shù)控制結(jié)構(gòu)圖
6 結(jié)束語
動態(tài)時域優(yōu)化的評估函數(shù)的調(diào)節(jié)系統(tǒng)的穩(wěn)定性最高,響應的時間及時,超調(diào)量的幅度也大大的降低。主要的原因是,系統(tǒng)自身就具有一定的誤差校正功能,對應的調(diào)控裝置能預先對產(chǎn)生誤差進行修正,使系統(tǒng)更加穩(wěn)定和可靠。此外此調(diào)控體系在于給定誤差修正方法還具有一定的發(fā)展?jié)摿Α?/p>
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19