基于相對方位信息和單間距測量的多智能體編隊協同控制
2021-08-03 06:31:50葉結松龔柏春李爽都延麗郝明瑞
航空學報 2021年7期
葉結松,龔柏春,李爽,*,都延麗,郝明瑞
1.南京航空航天大學 航天學院,南京 211106 2.復雜系統控制與智能協同技術重點實驗室,北京 100074
近些年來,以無人機集群、多機器人系統為代表的多智能體系統憑借其強大性能、對復雜環境的高度適應性、不會造成人員傷亡等優勢獲得了廣泛關注。作為多智能體系統研究的重點內容之一,集群或編隊的協同控制吸引了許多學者的研究。現有的多數編隊控制算法都假定系統中的每個智能體均能獲得其鄰居或領導者的位置信息或距離信息。但在室內,水下或深空等GPS拒止的環境中,控制算法所依賴的位置信息可能無法獲得[1]。因此,許多學者開始研究基于鄰居之間相對方位或角度約束的新型控制律。對二維空間運動的編隊,Moshtagh等[2]僅基于相對方位角信息成功地為一組恒速機器人設計協同控制律。Basiri和Bishop等僅依靠相對方位或者角度信息,分別以四邊形和三角形為目標隊形提出了分布式控制律[3-5]。Guo等[6]以兩個智能體和一個固定信標組成的三角形為目標隊形,研究了基于角度信息的控制律。Zhao等[7]僅通過相對角度測量實現了循環編隊控制,并且考慮了單個智能體失效和噪聲干擾等工況。在上述工作中,智能體的位置或角度、相對方位相互依存,雖然最終可以成功形成目標隊形,但每個智能體的最終位置無法預測,因為系統中沒有狀態已知的領導者作為參考基準。Eren[8]為“領導者——第一跟隨者”結構的多體系統提出了分布式控制法則,該系統的交互拓撲從兩個領導者(即領導者與第一跟隨者)及代表距離和相對方位約束的兩條邊開始,由一系列頂點增加操作構成。在文獻[8]中,具備方位剛性的編隊隊形具有統一的可伸縮性,因此,為了使編隊中各智能體間距擴展或收縮而不影響整體隊形,只需要調整一個距離約束即可。Trinh等[9]針對“領導者——第一跟隨者”編隊,提出了適用于任意維度的僅基于相對方位信息的分布式控制算法。
為實現編隊在有限的時間內收斂至指定隊形,Trinh等分別提出了僅依靠相對方位信息的編隊控制律[10-11]。van Tran等[12]設計了兩個分布式位置估計算法和一個基于位置信息的編隊控制律,通過相對方位信息估計相對位置,進而基于位置信息實現隊形控制。Li等[13]設計了一種新的僅基于相對方位信息的控制律,旨在指定的有限時間內實現編隊收斂,并建立了硬件平臺來驗證其有效性。Zhao和Zelazo[14]針對是否存在全局參考系的兩種情況,分別提出了相應的相對方位控制律。通過本體系下對相對方位信息的測量,Li等[15]設計了連續和離散時間情況下可全局收斂的分布式控制算法。Tron[16]研究了距離和靜止特征點對基于相對方位的編隊隊形控制效果的影響,仿真表明在沒有距離約束的情況下編隊中各智能體間距會發散。考慮同時利用其它約束,Bishop等[17]設計了基于方向和距離約束的分布式控制算法,適用于任意數量智能體構成的編隊。針對由平面內相對方位和智能體間距定義的隊形,Fathian等[18]提出了一種分布式控制方法。在位置、速度和加速度信息可以測量的情況下,Zhao和Zelazo等[19]提出了編隊控制律,使領導者智能體以恒定速度或時變速度運動時,剩余智能體可以保持編隊的形狀并維持相互之間的距離。Trinh等[20]為領導者智能體設計了額外的控制律以控制與第一跟隨智能體的間距,而其他智能體的運動僅依賴相對方位信息。
在實際的協同控制任務中,編隊必須具備以一定速度移動的能力,并在飛行的同時維持編隊的隊形。目前,有文獻針對非靜止的目標隊形設計了基于相對方位信息的控制律[21-25]。Schiano等[25]成功控制無人飛行器編隊形成由相對方位信息描述的期望隊形,并且實現了無人機在“零空間”中的運動。之后針對機載相機的三項感應約束即最小/最大距離,有限的視野和重疊遮擋,開發了基于梯度的控制動作,并通過四旋翼無人機進行了實驗驗證[24]。通過對位置和速度測量,van Tran和Anh實現了系統各智能體速度的一致并維持了編隊隊形[23]。Liu等[22]利用位置、速度和加速度信息,針對第二領導者智能體和其他智能體分別提出了控制算法。Zhao等[21]僅使用相對方位信息設計了編隊跟蹤控制律,并研究了不同的智能體模型,其中編隊的隊形規模由兩個領導者之間的距離確定。
本文在“領導者——第一跟隨者”架構的多智能體系統基礎上,通過Henneberg Construction方法構建拉曼圖,即多智能體系統的交互拓撲圖,使目標隊形具備方位剛性[26]。在借鑒文獻[20]中分布式控制律的基礎上,僅依據智能體間的相對方位信息和一條距離信息,提出新的控制律以使多智能體系統實現編隊集結、飛行,并且通過對領導者智能體與第一跟隨智能體間距的控制實現所有智能體間距的縮放。尤其針對領導智能體移動速度未知的情況,第一跟隨智能體仍能通過已有信息對領導者的速度進行估計,進而實現跟隨飛行。
1 問題描述與相關模型
1.1 問題描述
本文研究的對象是“領導者——第一跟隨者”結構的多智能體系統編隊,通過智能體間的相對方位信息與第一跟隨智能體和最高領導者智能體的距離信息,對第一跟隨智能體與剩余智能體分別提出分布式控制算法,在滿足相應初始條件限制下,實現編隊集結、隊形縮放與編隊飛行的目標。編隊的目標隊形幾何形狀由智能體間的期望相對方位信息唯一確定,而目標隊形中各智能體的間距則通過第一跟隨智能體與最高領導者智能體的間距進行控制。
1.2 運動學模型


(1)
式中:ui為智能體i的速度,即控制算法的輸出量。
1.3 測量模型

(2)

編隊的期望隊形由智能體間的期望相對方位集合定義:
(3)


對于相對方位信息的運算涉及正交投影矩陣。對于向量x=[x1,x2,…,xd]T,其正交投影矩陣的定義為

(4)
式中:Id為該維度下的單位矩陣。易得Px的一些特性,矩陣Px為對稱、半正定的且冪等的矩陣。其零空間為N(Px)=span{x},有特征向量{0,1,…,1}。
各智能體的測量對象即領導者智能體根據系統的交互拓撲圖確定。如領導者智能體作為編隊的最高領導者,只需根據任務要求調整及保持自身運動狀態,無需測量相對其他智能體的方位信息與距離信息。第一跟隨智能體作為領導者智能體的第一跟隨者,測量領導者智能體相對自身的方位信息的同時,也需測量同領導者智能體的距離信息作為控制器的輸入。其他所有智能體僅需依據交互拓撲圖,確定鄰居智能體,即領導者智能體,測量其兩個領導者智能體的相對方位信息進而實施分布式控制。本文研究的多智能體系統是由14個智能體形成的編隊,對應的交互拓撲圖中應有14個對應的節點。通過Henneberg Construction方法,本文構建的多智能體系統的交互拓撲圖如圖1所示。

圖1 系統中14個智能體的交互拓撲圖
可以看出,圖中的根節點1和節點2分別對應編隊系統中的領導者智能體和第一跟隨智能體。第一跟隨智能體僅有領導者智能體作為領導者,同時領導者智能體和第一跟隨智能體又作為剩余智能體的共同領導者。除領導者智能體與第一跟隨智能體外,每個智能體有且僅有2個領導者。
2 控制律設計及穩定性分析
現有的多數文獻研究了形成指定隊形的控制律設計,未考慮隊形規模的縮放變化控制。然而在實際任務中,隊形縮放在特定環境(如復雜障礙物環境)下有極大的優勢與應用需求。本文將在文獻[20]控制律的基礎上進行拓展,在完成編隊集結任務的基礎上,改進隊形規模的控制方法,通過對領導者智能體與第一跟隨智能體的間距控制,實現對編隊整體隊形間距的控制,以適應環境變化需求。并且拓展到編隊飛行。針對第一跟隨智能體是否可以獲取領導者智能體飛行速度的2種情況,為第一跟隨智能體設計相應的控制器。
首先,依然沿用以下假設條件:
1)系統的交互拓撲圖由Henneberg Construction方法構建,每個智能體都能夠獲取領導者智能體的相對方位信息,不考慮視覺重疊阻礙、光學相機視野等問題。

3)初始時刻,各智能體的位置不能重合,即pi(0)≠pj(0),1≤i≠j≤n。
考慮到原控制律下第一跟隨智能體位于非期望平衡點的情況,并且由于新的控制器當中包含距離控制,故增加一條假設條件。

系統中各智能體的交互拓撲圖由Henneberg Construction方法構建,是確保目標隊形具備方位剛性的充分條件[26]。由于相對方位信息的特殊性,為確保期望相對方位要求下的位置唯一性,智能體與其2個領導者智能體的期望相對方位不能夠共線。
2.1 領導者智能體
在編隊飛行階段,領導者智能體負責領導整個編隊飛向目標地點或按預定的航跡飛行,無需測量方位等信息。所有跟隨者智能體的速度將收斂到與領導者智能體的速度一致,同時以領導者智能體為隊形起始點,圍繞其形成由相對方位期望值與期望間距指定的編隊隊形。假定某一時間段內,編隊以恒定速度運動,領導者智能體的速度為定常矢量c(c∈Rd),當領導者智能體速度c為零矢量,即保持靜止時,其他智能體圍繞其集結,形成由期望相對方位描述的目標隊形,稱為編隊集結。當領導者智能體運動時,其他智能體追隨其運動并保持相對方位,稱為編隊飛行或隊形保持。領導者智能體的數學模型為
(5)
2.2 第一跟隨者智能體
對于第一跟隨智能體,首先考慮文獻[20]中的控制律:

(6)

在該控制律下,領導者智能體與第一跟隨智能體的間距d21不會發生變化,證明如下:
(7)
首先,該控制律的特性在于只使用一條相對方位信息對第一跟隨智能體實施控制作用,但是,該控制律的缺點在于不能夠改變領導者智能體與第一跟隨智能體的間距,并且由于方位剛性的限制,編隊各智能體的間距不能人為擴大或縮小。為了解決該問題,可以為領導者智能體額外設計一個關于距離的控制律[20],但是一旦領導者智能體為了維持或改變智能體間距而發生運動,編隊整體的位置便會不可預測或偏離指定位置。并且在任務中,領導者智能體可能是一個假想的虛擬目標或者固定的地理標志,其設置為系統“領導者”的目的是使其他智能體移動到相關的指定位置以執行特定任務,所以本文對第一跟隨智能體的控制律進行改進,使第一跟隨智能體不但能夠收斂到滿足期望相對方位的位置,并且可以自主控制與領導者智能體的間距。由于目標隊形具備方位剛性,所以可以通過改變第一跟隨智能體與領導者智能體的間距,在維持編隊隊形的基礎上調整各智能體的間距,即實現編隊隊形的縮放控制。
其次,在“領導者——第一跟隨者”結構的編隊系統中,第一跟隨智能體不僅作為跟隨者,也是編隊的第二領導者。當編隊進行集結或者編隊飛行時,最高領導者智能體的速度為c。以下分2種情況進行討論:第1種情況,第一跟隨智能體知曉編隊的期望速度,即最高領導者智能體的速度c,此種情況較為常見,第一跟隨智能體與領導者智能體協同領導編隊運動,多用于智能體間信息交互不受干擾的環境。而第2種情況則是在拒止環境下,信息溝通收到影響,第一跟隨智能體僅能通過相對方位信息與距離信息跟蹤領導者智能體,即期望速度c對于第一跟隨智能體是未知量。
第1種情況下,編隊飛行的速度c對第一跟隨智能體是已知的,但仍需為了保持、改變飛行隊形或隊形間距對第一跟隨智能體實施控制。對第一跟隨智能體改進后的控制律為
(8)
式中:k為距離控制項增益且k>0;c為領導者智能體的速度。E為領導者智能體和第一跟隨智能體的距離控制項,設計如下:
(9)

(10)

需要注意的是,當編隊以某速度飛行時,第一跟隨智能體在空間中的期望位置會隨時間變化,根據相對方位的定義式(2),有
(11)
將式(11)代入到式(10)中,有
(12)


(13)
為書寫方便,記V=V1+V2,其中
(14)
(15)
V1對時間求導,有
(16)

(17)
下面求解V2對時間的導數,代入式(5)和式(8),有
(18)

(19)
則V2對時間求導,有
(20)
則V對時間求導的過程為
(21)

(22)
將式(22)替換式(8)中的c,得到期望速度未知情況下第一跟隨智能體的控制為
(23)

(24)
式中:V1,V2的定義同式(14)、式(15),其對時間求導的過程稍有改變,將式(5)和新控制律(23)代入V1,具體過程為
(25)
領導者與第一跟隨者間距變化為
(26)

(27)
V3對時間求導,有
(28)
由式(25)、式(27)和式(28),可得
(29)
2.3 其他跟隨者智能體
多數現存的編隊飛行控制律[19,22-23],除了相對方位信息外還要求測量每個智能體的位置、速度甚至加速度等信息,對系統的測量成本和機載計算機的運算載荷要求顯然較高。針對此問題,對于除領導者智能體和第一跟隨智能體外的所有智能體提出改進的控制律,使得僅基于2個領導者智能體的相對方位信息即可實施控制。對智能體,其領導者智能體分別為智能體j和智能體k(1≤j≠k≤i-1),在本文的測量模型當中有Ni=(j,k)。首先考慮文獻[9,20]中的分布式控制律:

(30)
也可表示為
(31)
上述控制律在形成靜止目標隊形時被證明有效,但不能用于跟隨編隊飛行,累計誤差會逐漸增大。本節基于式(31)的分布式控制律,使用傳統“比例積分”(Proportional Integral, PI)控制器的思想,消除智能體跟隨編隊飛行時的偏差,改進后的控制律為

(32)
式中:K1>0,K2≥0為常數,作為比例、積分項的控制增益,適當選取K1,K2的值可以增大控制量從而加快隊形的收斂速度。
本節所提出的控制方法都僅依賴智能體間的相對方位信息與一條距離信息,相比傳統的控制方法,有需要的信息種類更少、信息的獲取更加簡便等優勢。除領導者智能體與第一跟隨智能體以外,剩余智能體的控制輸入信息僅包含各自領導者智能體的相對方位信息,在實際任務中可以顯著減輕機載傳感設備載荷。
3 仿真結果
為驗證所提控制方法的有效性,本文利用MATLAB R2019a對多智能體系統的編隊集結、隊形縮放與編隊飛行任務進行了仿真驗證。
3.1 編隊集結初始條件
本章針對由14個智能體組成的多智能體系統,采用1.3節建立的交互拓撲圖,形成“領導者——第一跟隨者”編隊。目標期望隊形為邊長為2 m的立方體,其中8個智能體位于立方體的8個頂點位置,領導者智能體位于其中一個頂點處,剩余6個智能體對應立方體六個面的中心點位置。各智能體在初始時刻的位置如表1所示。
3.2 編隊集結仿真驗證

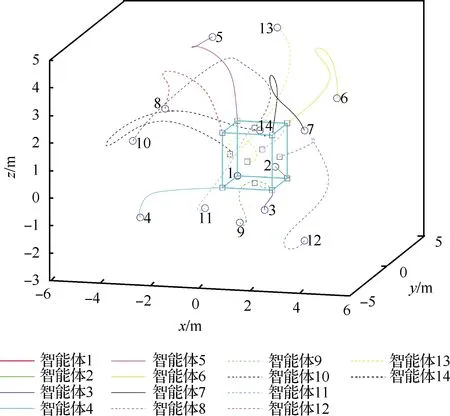
圖2 集結過程中智能體的軌跡

表1 智能體的初始位置
智能體根據相對方位信息運動的過程中,可以通過方位差判斷智能體是否收斂到隊形指定的位置。方位差定義的是智能體相對其領導者的實際方位與期望方位的矢量模值:
(33)
方位差可以展示各智能體相對領導者智能體的方位收斂過程。由圖3可以看出,除領導者智能體外,大約在15 s左右,各智能體的領導者相對其自身的方位都收斂到了期望值,即真實相對方位與期望方位的矢量差的模隨時間收斂,意味著編隊已經成功集結并形成了滿足期望方位的隊形。
編隊集結過程中各智能體的實際位置與期望位置的距離隨時間變化過程展示在圖4,與圖3表達的情況一致,編隊在大約15 s時完成編隊集結,各智能體運動到由期望隊形與領導者智能體指定的目標位置。
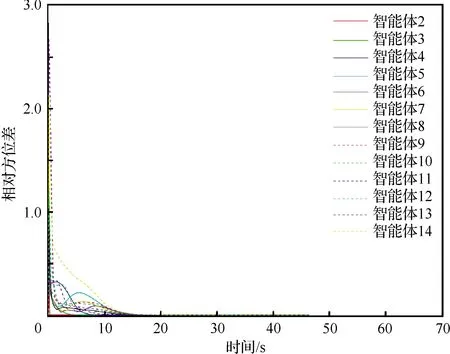
圖3 集結過程中的相對方位差
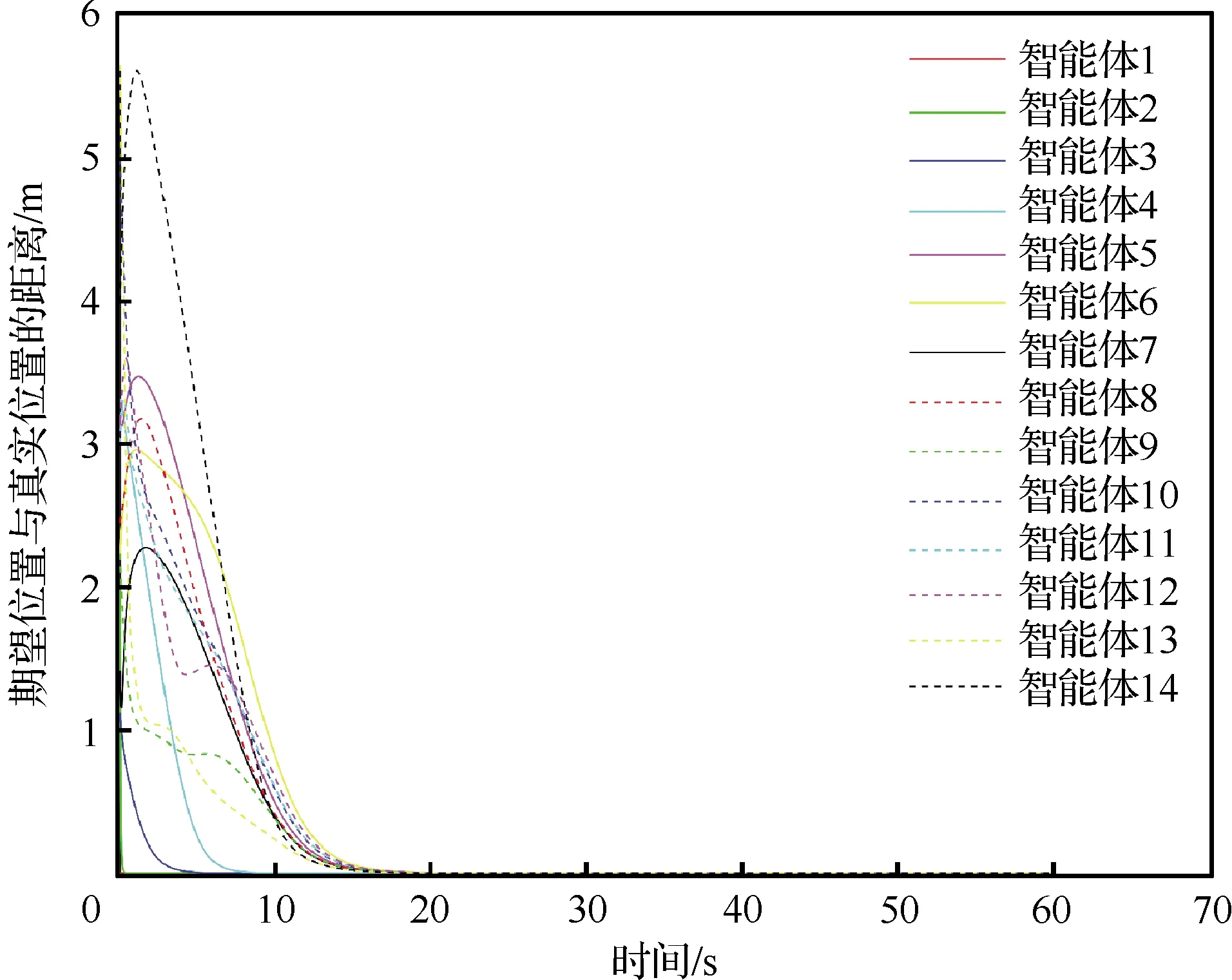
圖4 智能體實際位置與期望位置的距離

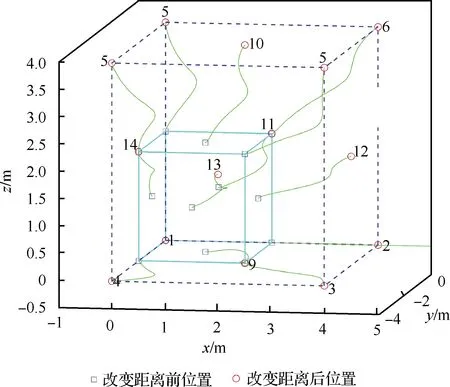
圖5 間距擴大隊形再次收斂
可以看出,隨著領導者智能體與第一跟隨智能體的期望間距變為4 m,領導者智能體的位置保持不變,第一跟隨智能體在保持相對期望方位的同時,在控制律的作用下運動到新的期望位置,雖有短時間的超調量,但從圖6可知收斂速度仍較快。而系統中的其他智能體相互間距同時得以變化,但系統總體的隊形仍然維持不變。
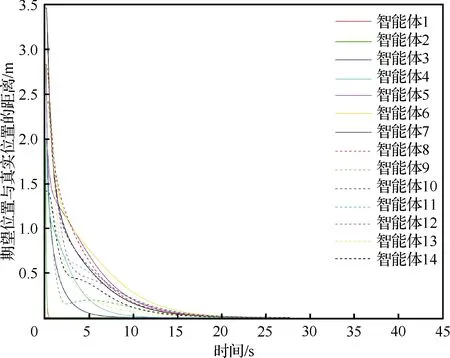
圖6 改變期望間距時,實際位置與期望位置的距離
由圖6可知,改進后的控制律可以實現編隊隊形的縮放。相比參考文獻中通過領導者智能體的移動改變和第一跟隨智能體間距的方法,改進后的控制律更加適用于多智能體系統執行任務的實際情況。
3.3 編隊飛行仿真驗證
當系統中的領導者智能體運動時,跟隨者智能體通過提出的編隊飛行控制律跟隨各自領導者飛行并且維持隊形。仿真過程中,領導者智能體的速度設定為c=[0.5, 0.5, 0.5]Tm·s-1,其他智能體的初始速度為零。K2=10,其他參數不變。圖7~圖9展示了在上述編隊集結的基礎上,領導者的速度對第一跟隨智能體是未知的情況下,系統編隊進行60 s編隊飛行的軌跡及過程,可以看出,在編隊飛行時,多智能體編隊仍然保持期望隊形。

圖7 領導者智能體速度已知時,多智能體協同編隊飛行軌跡
圖8展示了編隊飛行過程中,各智能體與領導者智能體的實際相對方位與期望相對方位的偏差隨時間變化情況,可以看到在約15 s后,幾乎所有智能體的方位差都在0.05以內。飛行30 s后,所有智能體的方位差在飛行過程中達到收斂狀態。

圖8 領導者智能體速度已知時編隊飛行過程中各智能體的方位差
圖9展示了飛行過程中各智能體三個維度的速度變化情況。從速度隨時間變化的圖像可以看出,編隊飛行早期,各智能體速度變化較大,并在期望速度值上下震蕩。大約26 s時,各智能體3個方向的速度值均收斂至期望速度值。之后,多智能體編隊以相同速度飛行,說明編隊隊形得以維持。

圖9 領導者智能體速度已知時,編隊飛行過程中各智能體三軸方向的速度
當第一跟隨智能體能夠獲取領導者智能體的飛行速度c時,圖10和圖11分別展示了編隊飛行的軌跡、飛行過程中各智能體相對方位差和速度的收斂情況。
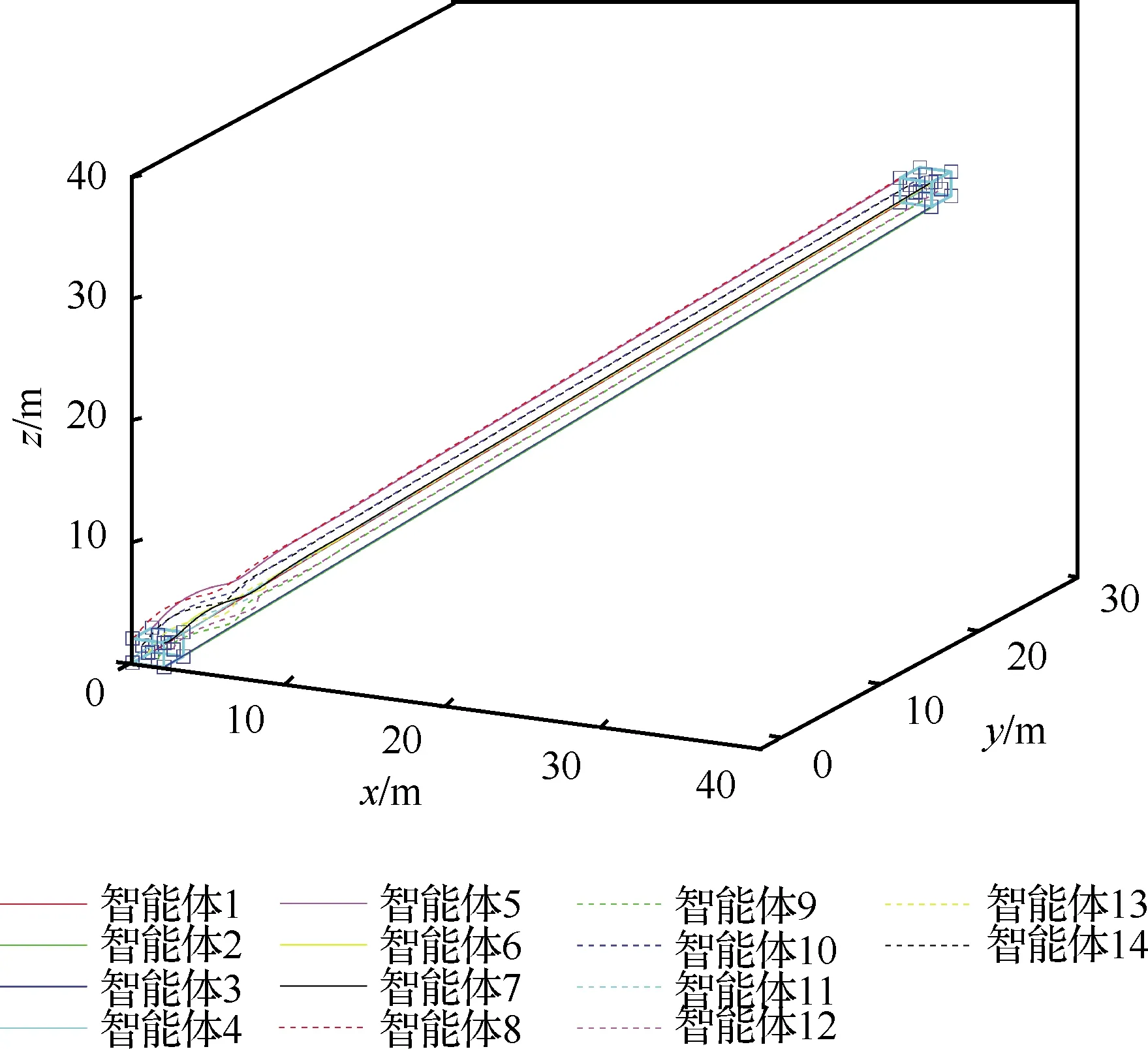
圖10 領導者智能體速度未知時,多智能體協同編隊飛行軌跡
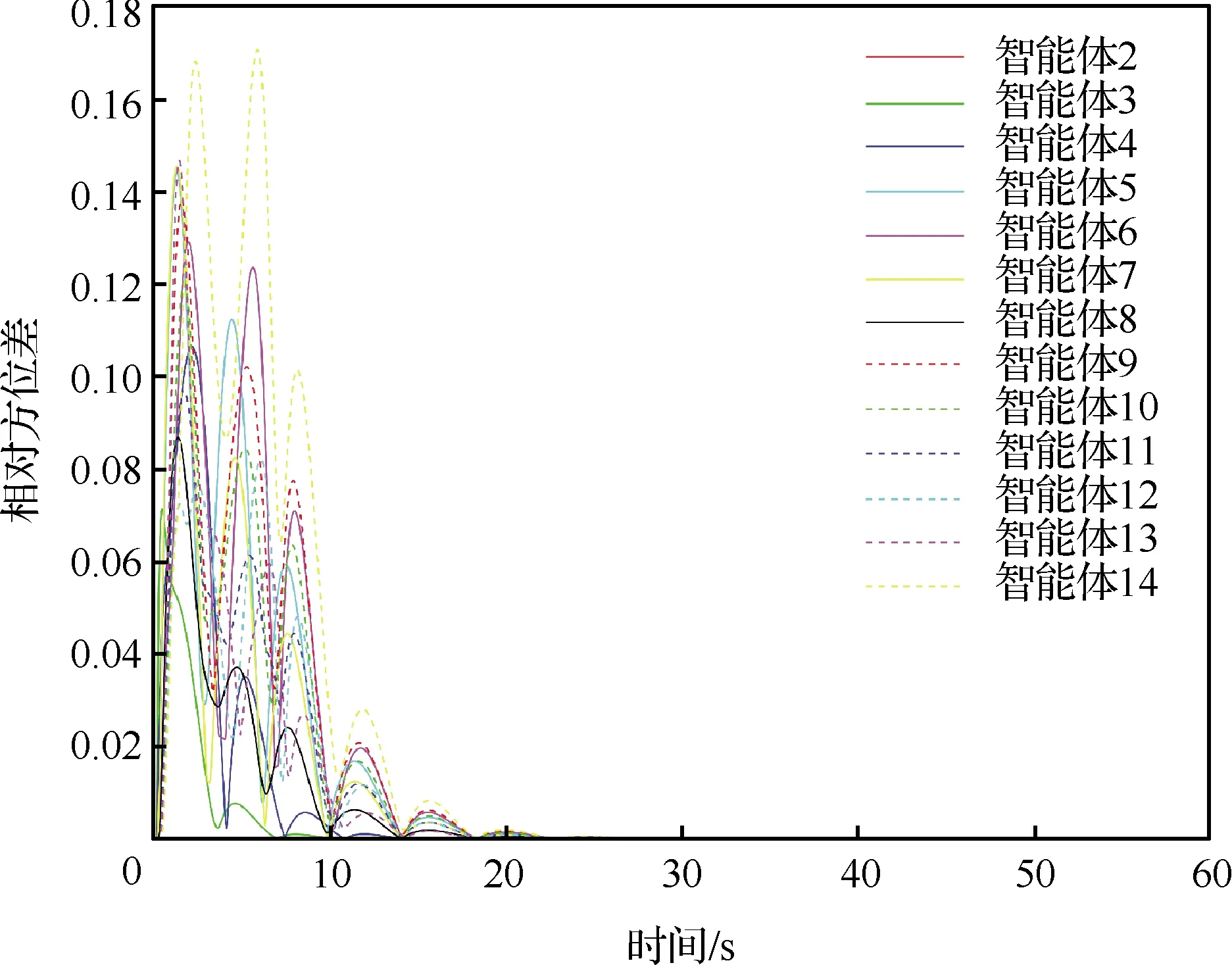
圖11 領導者智能體速度未知時,編隊飛行過程中各智能體的方位差
由圖10~圖12可知,在編隊飛行期望速度已知的情況下,第一跟隨智能體能夠追蹤領導者智能體,保持相對方位與期望間距,實現隊形保持。

圖12 領導者智能體速度未知時,編隊飛行過程中各智能體三軸方向的速度
本節通過仿真驗證了在基于智能體間的相對方位與單間距信息的控制律作用下,系統中的領導者智能體靜止或恒速運動時,跟隨者智能體均可以跟隨各自領導者收斂至期望位置或協同飛行,證實了控制算法的有效性。
4 結 論
1)本文針對“領導者——第一跟隨者”結構的多智能體編隊,提出了基于智能體間的相對方位信息與單間距信息的分布式編隊協同控制律。
2)對第一跟隨智能體,當知曉領導者智能體飛行速度時,提出了控制律以實現第一跟隨智能體的跟隨飛行與隊形保持,并且可以通過控制與領導者智能體的間距實現隊形的縮放控制。
3)當第一跟隨智能體無法獲取領導者智能體飛行速度時,通過提出自適應估計參數改進控制律,仍可實現第一跟隨智能體跟隨領導智能體飛行與間距控制。
4)對普通跟隨者智能體,提出了運用比例積分控制思想改進的控制器,仿真驗證表明基于該控制律多智能體系統能夠實現編隊飛行。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46