機載網絡時間觸發通信調度設計優化與評價方法
2021-08-03 06:33:26何鋒李二帥周璇李浩若龔子杰
航空學報 2021年7期
何鋒,李二帥,周璇,李浩若,龔子杰
北京航空航天大學 電子信息工程學院,北京 100191
航空電子系統(以下簡稱航電系統)涵蓋飛機通信、導航、探測、管理、控制等所有電子系統以及支撐各系統間信息交換和資源共享的網絡系統,是具有苛刻空間限制和功能/性能約束條件的信息密集型系統[1]。機載網絡是航電系統的重要組成部分,其連接飛機物理結構空間中的相關電子設備,支持電子系統間的信息綜合與功能綜合,從而使航電系統成為有機整體,并標志著航電系統架構代際演化[2]。
隨著計算機、通信等技術的飛速發展,航電系統對機載網絡提出了更高的性能要求。采用時間觸發(Time-Triggered,TT)通信機制可以避免傳統事件觸發(Event-Triggered,ET)通信機制下的資源競爭與共享沖突問題,從而提高信息傳輸的實時性,并保證信息交互的確定性。目前,以時間觸發以太網[3](Time-Triggered Ethernet, TTE)等為代表的時間觸發通信技術方案已得到廣泛關注,但將其應用于機載環境中需首要保證合理的時間觸發通信調度。這種通信調度設計協調TT消息,規劃時間偏置,以避免TT消息爭用物理鏈路影響其確定性傳輸,具有NP求解復雜度[4],難以在多項式時間內完成,因此需要探尋求解優化技術。此外,從航電系統功能實現的角度出發,機載網絡支持混合關鍵性流量以匹配不同優先級別任務,通信調度設計應關注消息延遲影響,保證消息盡快在規定時間內完成傳輸;并進一步支持應用層面任務執行,以拓展應用-網絡聯動調度,由此也對調度設計提出了進一步優化訴求。
目前,通信調度設計多基于有約束引導的啟發式方法或者求解方法進行,通過設置網絡拓撲和流量關系等約束,生成滿足約束的TT調度表,典型包括可滿足性模理論[5-8](Satisfiability Modulo Theories,SMT)、混合整數規劃[9-12](Mixed Integer Programming,MIP)以及啟發式算法[13-16],這些方法在求解過程中具有不同的解算速度和優化能力,但一般都比較耗時。采用強化學習[17](Reinforcement Learning,RL)方法在多領域算法優化方面具備了一些成功案例,可以考慮利用馬爾可夫過程描述增量化調度任務,通過設置調度狀態、動作和獎勵,以實現快速優化設計。不同的調度設計方法遵循不同的數學模型,采用不同的求解方式,同時也具有不同的運算特征和評價性能。為指導工程實際應用中調度方法的適應性選擇與進一步發展,應結合調度求解能力與性能保障兩個角度,從求解時間、可求解規模以及實時通信影響等多個維度開展對比分析研究。
為此,本文首先概要介紹時間觸發通信的過程與特征;在其基礎上給出不同約束引導下的調度模型,并發展出基于強化學習的調度方法;然后從求解能力和性能保障角度出發,建立具有普適性的調度設計評價指標;最后以典型網絡拓撲為應用背景,針對不同調度設計方法開展對比研究,分析并歸納實際應用特征,以期探尋機載網絡時間觸發調度模式,并給出調度算法選擇參考建議。
本文的創新點在于:形成了對時間觸發通信調度設計方法的一致符號與模型描述,提出了時間觸發通信調度設計評價指標體系與計算公式,針對不同調度設計方法應用特征并結合典型案例進行了性能對比和建議。
1 時間觸發通信機制
時間觸發通信著重滿足安全關鍵任務中消息傳輸的實時性要求,并致力于保證數據傳輸的確定性與可靠性,在機載網絡升級換代中扮演關鍵角色。典型時間觸發通信組網方案包括MIL-STD-1553B[18-19]、時間觸發協議[20](Time-Triggered Protocol,TTP)、時間觸發控制器局域網[21](Time-Triggered-Controller Area Network,TTCAN)[22]、TTE以及時間敏感網絡[23](Time-Sensitive Network,TSN),其主要技術匯總如表1所示。這些組網方案基于時間觸發通信進行調度設計,各個節點設備根據固定時刻驅動網絡上的所有活動,可以有效保證航電系統對信息交互的實時性和確定性要求。TTE、TSN等新一代交換式互連技術更是憑借著高帶寬利用率、可擴展組網規模等優勢,能夠很好地滿足機載系統發展需求。

表1 典型時間觸發通信組網方案技術匯總
本文以典型TTE網絡為應用背景進行時間觸發通信調度設計與評價研究,其可支持TT流量、速率約束(Rate Constrained,RC)流量和盡力傳輸(Best Effort,BE)流量混合關鍵性傳輸[24]。圖1給出包含三個端系統與一個交換機的TTE網絡示例,其中發送端1發送一條周期為3 ms的TT流量以及BE流量,發送端2發送一條周期為2 ms的TT流量以及BE、RC流量,交換機對來自于2個發送端的流量進行綜合,向接收端發送集成流量。
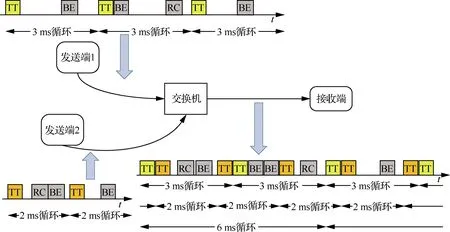
圖1 TTE網絡中流量的傳輸過程
考慮時間觸發通信的具體過程,當多條流量在交換網絡中傳輸綜合時,TT流量在全局時鐘同步機制基礎上,通過靜態規劃傳輸時間窗口并離線生成時間調度表,可以實現無沖突傳輸,從而有效改善時間確定性和傳輸可靠性。RC流量遵循事件觸發通信機制,缺乏事先規劃好的傳輸時間窗口,勢必會與其它事件觸發消息競爭端口輸出,導致傳輸過程存在很大的不確定性;而且其與更高優先級的TT流量在傳輸過程中相遇時,采取避讓(集成)策略,將進一步增加傳輸不確定性。BE流量為傳統以太網通信方式,具有最低優先級且無需服務質量(Quality of Service,QoS)保證。

2 基于約束引導的調度設計
2.1 SMT方法
SMT問題是布爾可滿足問題的拓展,用于求解SMT問題的自動化工具被稱為SMT求解器,常用的有Yices、Z3等。由于TT消息在傳輸過程中受到嚴格時間約束,可以根據網絡拓撲及配置參數表示約束條件,將其轉換成SMT一階邏輯形式,并利用SMT求解器求解,從而實現TT通信調度設計。文獻[5]首先提出這種基于SMT的調度設計方法,其針對多跳網絡給出了背靠背傳輸模式下的調度約束條件,并通過增量化的方式提高了求解速度;進一步,為了兼顧RC消息傳輸實時性,將TT消息間隔視作孔隙,提出了多孔傳輸模式下的調度求解方法。文獻[6]改進了傳統基于靜態SMT的TT調度方法,以獲得最佳離散間隔來減小RC的端到端延遲。
1)基本周期約束:任意消息fi在其傳輸路徑pi,j上的任意輸出端口τr處的發送時刻非負,且能保證fi在其傳輸周期內發送完成。
2)路徑依賴約束:任意消息fi在其傳輸路徑pi,j上兩個相鄰的輸出端口τr、τs的調度時刻受到交換機緩沖區深度、存儲空間大小以及技術延遲等限制。
3)端到端傳輸約束:任意消息fi的端到端傳輸延遲fi,j,r·etedelay不超過其截止期限。
4)同步轉發約束:考慮多播消息fi在輸出端口τr首次出現傳輸路徑分離,其在τr及前序端口處的調度時刻均應相同[25]。
5)傳輸開銷約束:任意輸出端口τr處TT時間片數量最小,也即TT消息背靠背傳輸[6]。
6)無沖突約束:任意兩條消息fi、fk,若其傳輸路徑pi,j、pk,l均經過輸出端口τr,則fi、fk的發送時刻應保證兩消息在τr處不發生競爭沖突,可表示為
?τr∈pi,j∩pk,l,
{fi,j,r·offset+a×fi·period≥fk,l,r·
offset+b×fk·period+fk·length}∨
{fk,l,r·offset+b×fk·period≥
fi,j,r·offset+a×fi·period+fi·length}
(1)
式中:HPr表示流經τr的所有消息的超周期。
2.2 MIP方法
MIP方法是一種線性規劃方法,其在給定線性約束條件下,研究線性目標函數的極值問題,目前有Gurobi、CPLEX等多種求解器,可實現大規模約束變量和約束條件下的MIP問題快速規劃。由于其天然支持帶目標條件的性能優化求解,已被許多學者用來實施通信調度設計研究。例如,文獻[9]引入幀間間隔和同步誤差等時間參數,并考慮與應用層匹配,實現了應用響應時間和端到端延遲的多目標優化;文獻[10]進一步強調消息對任務的依賴關系,通過預先處理減少約束變量,可在合理時間內完成工業規模的消息調度設計;文獻[11]分析TT消息發送、傳輸和接收的完整過程,以消息流累積端到端延遲為目標進行優化設計;在此基礎上,文獻[12]將網絡與分區聯合考慮,給出了保證分區層端到端延遲最小時的通信調度結果。
基于MIP方法進行調度設計也應滿足與SMT方法相似的約束條件。但應注意兩種方法所針對的求解域不同,MIP方法無法實現SMT方法中無沖突約束的Either-Or語句,所以需對式(1)進行轉換表述,針對端口τr處的任意2條TT消息fi、fk引入二進制決策變量βi,k,r有
?τr∈pi,j∩pk,l,
{fi,j,r·offset+a×fi·period+βi,k,r×φ≥
fk,l,r·offset+b×fk·period+fk·
length}∧{fk,l,r·offset+b×fk·
period+(1-βi,k,r)×φ≥fi,j,r·offset+
a×fi·period+fi·length}
(2)
式中:φ取值足夠大以保證βi,k,r=1時第1個不等式恒成立,而βi,k,r=0時第2個不等式恒成立。此外,MIP方法支持優化設計,常用優化目標是最小化消息平均端到端傳輸延遲,即
(3)
因為該優化目標的引入,應用MIP進行調度設計的過程中通常可以省略端到端傳輸約束。
2.3 啟發式方法
啟發式算法也是解優化問題的一種常用方法,其根據某種啟發式信息對已知的可行解進行改進,通過若干次迭代在相對短的時間內獲得滿意解,典型包括遺傳算法(Genetic Algorithm,GA)等。通常啟發式算法獲得的解極有可能是近似解,而不一定是最優解,但由于啟發式算法實現簡單,且支持大規模快速運算,所以目前也已被廣泛應用于時間觸發通信調度研究中。例如,文獻[13]綜合考慮TT與RC消息的可調度性,以RC端到端延遲最小為優化目標,進行TT消息調度設計;文獻[14]在此基礎上,結合消息分包、VL分配與路由等因素影響,通過設置消息候選列表,進一步提高了消息可調度性及傳輸緊性;文獻[15]針對系統應用、分區或計算模塊增加導致通信流量增加的情況,完成了通信消息的增量式調度設計;文獻[16]在分區模型基礎上,設計TT消息的非多孔性調度表,可以大幅減少RC消息的端到端傳輸延遲。
基于啟發式方法進行調度設計同樣也應滿足與前文一致的約束條件,其公式化描述可以直接借鑒前文經驗。值得注意的是SMT或MIP方法可直接應用相應的求解器,在設定求解變量、輸入約束條件后進行黑盒運算,便能獲得滿足約束的調度方案;而啟發式算法還應設計迭代搜索策略以保證優化設計的運行速度和近似程度。一種通用方法是首先比較消息fi的端到端延遲與其截止期限,以判定是否存在可行調度解。令
(4)
顯然,若cTT/RC>0,則存在fi使得
fi,j·etedelay>fi,j·deadline
(5)
即不可調度;若cTT/RC=0,則恒有
fi,j·etedelay≤fi,j·deadline
(6)
即可調度。在此基礎上,定義
(7)
以表征不同可行調度解之間的性能差距,并設置代價函數
Cost=ωTT×δTT+ωRC×δRC
(8)
式中:δTT/RC為調度可行度,有
(9)
其中:ωTT/RC為TT或RC幀的懲罰權重。當不可調度時,ωTT/RC取較大數值以保證搜索快速向可行區域推進;當可調度時,ωTT=0以保證搜索向RC延遲更小的性能優化方向推進。
3 基于強化學習的調度設計
基于約束引導的調度設計應用于工業規模機載網絡往往存在耗時較長的缺陷,為實現工業規模下機載網絡的快速調度設計,可采用基于強化學習的設計方法。強化學習通過與動態環境的即時交互獲取狀態信息,并反饋強化信號對所采取的行動進行評價,經過不斷學習和選擇實現最優策略。將其應用于時間觸發通信調度設計,需要首先進行適應性定義,例如文獻[17]將狀態state定義為輸出端口當前的消息排布方式,將動作action定義為TT消息在端口的調度發送時刻,即若干fi,j,r·offset,將獎勵reward定義為調度成功與否以及端到端傳輸延遲。
在訓練初期,為了能夠盡快找到端到端延遲較小的調度表作為訓練樣本,使用樹搜索方法結合深度優先與最優優先進行初始搜索,并剪掉明顯不能找到結果的分支加快搜索。
在訓練階段,首先用初始搜索所得樣本對神經網絡進行預訓練,以改進均方差為目標函數
(10)
獲得一條完整的訓練軌跡,即可保證在每個狀態state(t),神經網絡的輸出out(t)逼近action(t)。為便于進一步探索和適應,需要對輸出out提供一定噪聲,可以out為中心,取寬度有限區間均勻采樣作為fi,j,r·offset。然后改進貪婪策略進行軌跡收集,在每個狀態處選擇盡量減小端到端延遲的動作action,將策略參數化并尋找最優參數保證所有消息的端到端延遲最小。由于此時搜索空間較訓練初期較小,應使用較小的學習率,可設置目標函數為軌跡總獎勵值,有
(11)
式中:P(t,θ)為t時刻策略選擇已執行動作action的概率;reward(t)為t時刻執行action的獎勵值。在此基礎上,對目標函數求梯度以構造損失函數,從而保證目標函數以最快的速度向端到端延遲最小的方向收斂。考慮到fi,j,r·offset可選擇范圍極大,直接計算梯度會導致梯度過大而無法優化,故對其進行對數化處理,有
(12)
為了獲得更多樣化的樣本,可以采用n步展開方法進行搜索,即每到一個狀態時,模擬之后n步搜索。如果在n步之后可以滿足預先設定的最低端到端延遲要求,則繼續采用這一條軌跡;如果沒有滿足要求或者消息無法調度,則選擇其他軌跡。注意模擬最大深度n根據消息總數等特征確定,以避免n較小時過早收斂到初始軌跡而陷入局部最優解,而n過大時導致計算開銷龐大;預先設定的閾值通過動態方法確定,可以根據搜索的深度進行自適應調整。
此外,這種基于強化學習的調度方法具備一定的泛化能力,在訓練完成后可以直接應用于消息分布相近的調度求解問題中。
4 調度設計評價
航電系統綜合化程度的不斷提高導致機載網絡在組網拓撲、消息通信規模、消息傳輸干擾等方面的復雜性日益增加,為時間觸發通信調度的設計及優化也帶來了巨大的挑戰。應回歸時間觸發通信調度設計的求解能力與性能保障兩個角度,建立合理的評價指標體系以開展不同調度設計方法的有效性評估。
4.1 求解能力
調度設計的求解優化重點關注調度方法的求解時間T和可求解規模S,是判定調度方法是否適用的最根本指標。
求解時間是調度方法開始運行到結束運行的時間跨度,可表征調度方法的執行效率。受限于求解器自身運算速度或者迭代搜索策略設置等因素影響,可能存在調度算法長時間運算而無法獲得封閉解的情況,考慮到這無法滿足工業實際應用需求,對求解時間加上限約束T≤Th,典型可取Th=10 h等[11]。求解時間達到該上限而仍未獲得封閉解則可等價認為此時無法調度,所以應注意結束運行時并不一定能夠獲得可行調度解。
可求解規模具體通過網絡負載體現,強調在相同網絡拓撲結構的基礎上,增加消息條數以提高網絡負載,判斷調度方法在求解時間上限范圍內能否獲得封閉解,或者統計能得到封閉解時所對應的最大平均負載[11]。假設網絡輸出端口總數為Nport,且有Nr條消息流經端口τr,記作{f1,f2,…,fNr},則網絡平均負載
(13)
4.2 傳輸延遲
調度設計的性能優化重點關注調度結果對系統實時性的影響[26]。消息在網絡傳輸過程中的端到端延遲是一項重要衡量依據,顯然消息在規定的截止期限內越快到達目的節點,則網絡系統的實時性保障潛力越強。
fi,j,lasti,j·offset-fi,j,firsti,j·offset
(14)
式中:firsti,j,lasti,j分別表示fi在傳輸路徑pi,j上的第一個輸出端口和最后一個輸出端口。
(15)
RC的服務曲線受到TT強制搶占的影響,有
(16)
(17)
通過對比RC消息最壞延遲與截止期限的相對大小關系,即可進行消息是否滿足實時要求的基本判斷,并可在實時要求保障條件下進一步計算消息傳輸時間裕量開展評價分析[1]。
在此基礎上,可以分別計算TT消息和RC消息的端到端最壞延遲DTT和DRC的平均值以反映調度設計對延遲影響的統計特征。
4.3 調度模式
背靠背[7]和多孔[29]兩種調度模式的不同也會極大影響系統的實時性能。圖3以不同直線表示不同端口,不同色塊表示不同TT消息調度窗口,給出了兩種調度模式的對比。背靠背模式下TT消息在周期內緊密排列,RC消息有較長的完整傳輸時間窗口;多孔模式下TT消息在周期內分散排列,RC消息可利用TT間隔迅速響應。
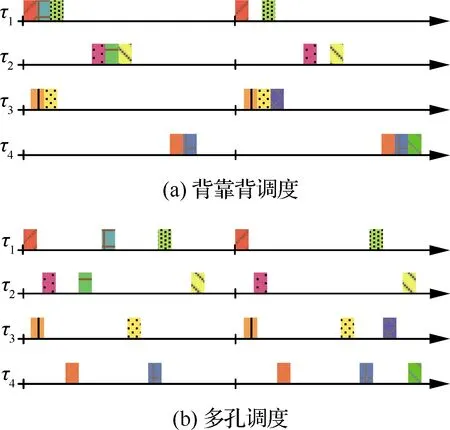
圖3 時間觸發通信調度模式
對于調度模式的評價指標可統一表征為TT窗口的均勻程度ζTT。考慮HPr內流經τr的TT幀個數
(18)
這些幀按時間順序排列從而構成有序集合{f1,f2,…,fNfr},將幀fi與下一幀的孔隙間隔記為θi,則有
θi=fi+1·offset-fi·offset-fi·length
(19)
特殊地
θNfr=HPr+f1·offset-fNfr·offset-
fNfr·length
(20)
此時,TT調度窗口孔隙間隔的標準差
(21)
由于所有幀間隔之和為定值
(22)
可推導得到λr取值范圍
(23)
當
{θi}={0,0,…,φr}
(24)
時,λr取最大值,對應于完全緊密調度。當
(25)
時,λr取最小值,對應于均勻多孔調度。為便于TT窗口均勻程度概念直觀理解,即ζTT越大,程度越高,考慮λr為成本型指標,對其進行歸一化處理,并綜合全網端口有
(26)

5 實驗分析
5.1 案例設計
考慮一個典型工業規模下的組網案例[12],拓撲結構如圖4所示,由10個端系統和7個交換機構成。設計8種不同規模流量配置的實驗案例,其TT/RC消息條數NTT/RC、骨干網絡負載率STT/RC以及網絡總負載S如表2所示。其中,消息參數配置采用隨機方法生成,源節點和目的節點從拓撲結構端系統列表中隨機選取,消息幀長在[127,1 538]bytes內隨機選擇,且TT周期和RC帶寬分配間隔在[2,128]ms內按照2的冪次率隨機生成;消息傳輸路徑結合最短路徑算法和流量均衡策略進行自動分配,以避免因為某條鏈路或某個區域過于擁堵,而出現系統無法調度求解或調度性能極差等極端情況;各案例采用相同RC配置信息,以充分體現TT調度設計對RC通信延遲影響。

表2 實驗案例配置

圖4 工業規模組網案例
為有效評價調度方法性能,在Eclipse環境下集成SMT求解器Z3和MIP求解器Gurobi,搭建綜合調度設計平臺,開發實現基于SMT、MIP、GA以及RL的設計方法,并分別應用各種方法針對上述各實驗案例進行調度設計與結果統計對比。
5.2 求解能力對比
調度方法基本求解能力體現于求解時間和可求解規模。由于案例設計中已給出流量規模,且不同調度方法能否求解可通過求解時間是否達到允許上界進行統一表征,故此處僅給出不同案例配置下的求解時間對比,如圖5所示。

圖5 不同調度方法求解時間對比
對于規模較小的配置情況,SMT和MIP方法應用成熟求解器可以在1 min內快速完成調度設計,GA和RL方法相對時間較長,但仍可在20 min 內完成調度求解。隨著消息條數增加,SMT方法最先無法完成調度,在本實驗研究過程中最多可調度180條TT消息;MIP方法借助于Gurobi的強運算能力,具有優于SMT的可求解規模,但其求解時間隨消息條數增多而急劇增加,在時間上限內最多可調度300條TT消息;GA和RL的求解能力逐漸凸顯,尤其RL可以實現更快速的調度設計。當TT消息條數達到400時,僅有GA和RL方法可以進行調度設計,其求解時間分別為4.5 h和30 min。
此外,應注意SMT和MIP方法可得到穩定的調度設計,即相同配置情況下多次運行結果高度一致。而GA和RL方法需要搜索迭代,具有一定的隨機性,故相同配置情況下多次運行結果存在明顯差異,且求解時間與設置的迭代次數正相關。
5.3 傳輸延遲對比
為全面對比不同調度算法對消息網絡傳輸延遲的影響,對各算法下TT端到端延遲和RC最壞端到端延遲進行統計,如圖6所示。其中SMT方法和MIP無法支持所有案例配置,僅給出其所支持配置情況統計結果。
針對TT延遲,不同調度方法對比如圖6(a)所示。SMT方法僅給出可行調度方案,而沒有優化策略,故其TT延遲遠高于其他調度方法,在規模較小的配置情況下也達到毫秒級別。MIP以TT延遲最優為目標進行優化調度設計,故其TT延遲明顯優于其他調度方法;并且隨網絡規模擴大TT延遲保持在200 μs附近小幅波動而未體現明顯增加趨勢,這是由于實驗配置中TT帶寬占比在20%以下,MIP調度方法可在各端口處找到合適的時間窗口,保證TT及時轉發傳輸。GA和RL方法的統計曲線重合度很高,在TT條數不超過200條的較小規模配置情況下,其延遲明顯低于SMT方法且略高于MIP方法;在中等規模配置情況下,會隨網絡規模擴大而增加但仍可保證亞毫秒級別;在TT條數超過300條的大規模配置情況下也可保證延遲不超過1.5 ms。

圖6 不同調度方法傳輸延遲對比
針對RC延遲,不同調度方法對比如圖6(b)所示。由于RC延遲受到高優先級TT流量影響,故不同調度方法下的RC統計曲線均體現出隨TT規模擴大而增加的整體趨勢。SMT和MIP 兩種算法下RC最壞端到端延遲分布基本相同,這是由于2種算法均采用背靠背調度策略,可用于RC傳輸的TT調度窗口間隔相似。GA和RL方法在調度過程中考慮以RC延遲為優化目標調整調度策略,較SMT方法和MIP方法具有明顯的RC傳輸優勢,平均優化程度分別可達到7.97%和12.35%。
5.4 調度模式對比
調度模式通過TT窗口均勻程度ζTT反映,不同實驗案例配置下各種調度方法的ζTT以及TT和RC平均端到端延遲DTT/RC(ms)如表2所示,其中“—”對應表示該案例配置下該調度算法無法求解。可以發現SMT和MIP方法的ζTT較GA和RL方法更小,這表明前兩者更傾向于背靠背調度模式而后兩者更傾向于多孔調度模式。注意即使背靠背調度模式下,TT窗口間也會天然存在圖1所示消息幀周期傳輸所帶來的孔隙,所以SMT和MIP 兩種算法的ζTT并不是一味偏向于較小的數值,此處僅以相對大小給出調度模式的傾向性。
在此基礎上,為進一步直觀展示ζTT對流量傳輸延遲的影響,利用表3數據繪制4種調度方法下的TT窗口均勻程度與傳輸延遲關系圖,如圖7所示。藍色折線對應于TT流量,可以發現ζTT與DTT無明顯相關性,這是由于ζTT以端口為對象,分析特定端口處所有TT幀的窗口排布,而DTT以消息為對象,分析特定消息在其傳輸路徑上的調度時刻。紅色折線對應于RC流量,從圖7(a)至圖7(f)中均可觀察到DRC隨ζTT增加呈先減小后增加的趨勢,且存在明顯轉折點保證DRC更小,這說明較背靠背調度或均勻調度而言,TT窗口孔隙適度的調度更利于RC流量在網絡中的傳輸;圖7(g)~圖7(h)的折線雖然僅有增加的趨勢,但也符合上述結論。

表3 不同調度方法調度模式對比

圖7 TT窗口均勻程度與傳輸延遲
6 結 論
近年來,航電系統對數據的實時通信要求逐漸提高,時間觸發通信技術憑借其良好的實時性能保障機制得到廣泛關注,但同時也帶來了調度設計的復雜性。本文從此角度出發,分析基于約束引導與基于強化學習的不同調度方法的求解能力與性能保障,主要工作和結論如下。
1)總結了時間觸發通信模型,并針對TTE網絡分別基于SMT、MIP、GA和RL等方法設計了時間觸發通信調度模型。
2)建立了合理的評價指標體系以開展時間觸發調度設計評估,典型包括求解時間、可求解規模、TT和RC流量端到端延遲以及TT窗口均勻程度,并給出了應用網絡演算進行最壞傳輸延遲計算的方法。
3)通過工業組網案例對上述通信調度模型進行對比評價分析,SMT方法僅可對小規模案例提供可行調度方案,不具備優化設計能力;MIP方法優先確保TT傳輸,可適用于中小規模案例;GA和RL方法具有明顯RC延遲優勢,并能完成大規模案例調度設計。
未來機載網絡時間觸發通信調度優化設計的研究重點與發展趨勢可能包括以下幾個方面:
1)進行增量式調度設計,以提高調度求解速度和可求解規模,并適應系統增量升級發展需要。
2)探尋TT窗口均勻程度與RC延遲的復雜關系,以有效引導調度優化方向。
3)聯合系統應用層的時間觸發通信調度優化設計。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56