未來城市空中交通管理研究綜述
2021-08-03 03:45:20張洪海鄒依原張啟錢劉皞
航空學報 2021年7期
張洪海,鄒依原,張啟錢,劉皞
1.南京航空航天大學 民航學院,南京 210016 2.南京航空航天大學 理學院,南京 210016
1 城市空中交通發展概況
1.1 基本概念
城市交通是城市社會經濟活動的重要支撐,是未來城市建設發展的關鍵所在。目前,人們提出了許多未來城市運行概念,但是,任何概念都離不開智能交通運輸系統[1]。城市空中交通(Urban Air Mobility, UAM)作為其中的重要一環,近些年來,在5G通信、自動駕駛與電力推進技術的推動下,引發了社會各界的廣泛關注。優步(Uber)[2]、空客(Airbus)[3]、美國國家航空航天局(National Aeronautics and Space Administration, NASA)[4]、麻省理工學院(Massachusetts Institute of Technology, MIT)[5-7]、密歇根大學(University of Michigan, UMich)[8]、美國MITRE科技公司[9]、巴西航空工業公司(EmbraerX)[10]、中國億航智能[11]等相關研究組織與機構分別對城市空中交通運行概念進行了不同程度的探討。NASA[4]指出城市空中交通作為按需交通(On-Demand Mobility)[12-13]的子集,是一種適用于載人航空器與無人航空器系統的新型交通運作模式。UMich[8]提出了未來城市空中交通的2種發展途徑:第1種是有人駕駛發展模式,通過拓展傳統空中交通管制(Air Traffic Control, ATC)職能[5],探究駕駛員與管制員在新型城市空中交通運行模式下的相互關系,將現有空中交通管理(Air Traffic Management, ATM)概念推廣應用到城市空中交通管理中,以此來推動城市空中交通的快速發展;第2種是無人駕駛發展模式,通過自動駕駛、自動控制等自動化、智能化技術的發展,在無人駕駛航空器系統(Unmanned Aircraft System, UAS)概念的基礎上,進一步提高城市空中交通系統保障能力,以確保城市空中交通載人載貨飛行的安全性與可靠性。
城市空中交通是指在城市低空空域內主要利用垂直起降或短距起降航空器及相關系統設施實現載人載貨空中運輸的活動。目前,城市空中交通空域范圍沒有明確定義。NASA[4]認為城市空中交通空域應當主要包括E類與G類空域,視城市周邊機場規模,可能包含B類至D類空域。根據中國空域劃分特點,城市空中交通的活動范圍應當主要集中于低空空域。低空空域一般是指真高1 000 m(含)以下的飛行區域,可分為管制空域、監視空域、報告空域以及目視飛行航線。未來將實現真高3 000 m以下監視空域和報告空域無縫銜接。城市空中交通的載運工具主要包括短距起降(Short Take Off and Landing, STOL)航空器[14-15]、垂直起降(Vertical Takeoff and Landing, VTOL)航空器[16]與電推進垂直起降(electric Vertical Takeoff and Landing, eVTOL)航空器[17]等。這些航空器的主要特點在于起降所需場地小,節省城市空間,且不易受城市復雜環境的影響,飛行沖突解脫自由度高,對自動駕駛技術更為友好,容易實現點到點的按需運行。城市空中交通具有立體、便捷、及時、高效等優點,能有效緩解城市交通擁堵問題,可與地面道路交通、地下軌道交通形成互補和聯動,并將逐步發展成空地下三位一體的新型城市綜合交通體系。
1.2 市場需求
隨著城市化進程不斷加快,城市人口數量急劇增長,陸用空間日趨飽和,交通擁堵問題日益嚴重,有限的交通資源與不斷膨脹的交通需求之間矛盾激化,亟需開發城市空中可用空間,發展垂直式立體交通,逐步構建以空中交通為基干的未來城市綜合交通系統。
2018年2月至4月,包豪斯航空[18]在德國慕尼黑對248名受訪者進行了城市交通出行偏好調查。結果表明,大眾對于城市空中交通出行方式表示普遍認可,其中,出行時間、出行成本以及交通安全性可能是決定城市空中交通能否運行的關鍵性因素。皇家墨爾本理工大學(Royal Melbourne Institute of Technology, RMIT)[19]針對澳大利亞墨爾本地區進行了城市交通出行方式對比分析,研究表明,城市道路交通的擁堵現狀將使城市空中交通獲得巨大的潛在市場,城市空中交通在出行時間上具有顯著優勢。據保時捷管理咨詢公司(Porsche Consulting)[20]預測,2035年將有2.3萬輛eVTOL航空器服務于價值740億美元的全球市場;據摩根士丹利(Morgan Stanley)[21]預測,2040年全球城市空中交通的產業規模可能達到1.5萬億美元。NASA在城市空中交通市場分析報告[22]中指出,空中公交車(Air Metro)市場運行預計將在2028年開始盈利,并且于2030年空中公交車旅客出行次數將達7.4億人次,而無人機物流市場將于2030年承擔5億單 “最后一公里” 配送運輸服務。
然而,盡管城市空中交通市場需求旺盛、應用前景廣闊,城市空中交通生態體系在空域管理、適航條例、基礎設施建設以及社會認知接受度等方面仍需進一步完善[23]。需采取有效的城市空中交通發展戰略,建立完善的城市空中交通管理體系,實現城市空中交通安全高效、自動智能、綠色環保的高質量發展。
2 城市空中交通發展歷程
2.1 歷史沿革
城市空中交通的觀念由來已久,自1939年直升機問世以來,直升機的獨特優勢不斷引發人們對于城市空中交通的思考。根據不同時期的研究熱點以及運行概念的不斷更迭,城市空中交通的發展歷史大致可分為以下3個階段:
第1階段:1947—1980年。1947年,洛杉磯航空公司首次進行有執照的定期商用直升機飛行,主要用于郵件運輸。1951年,美國直升機航空公司開始提供首批貨運服務;1953年,開始提供首批客運與快遞服務[24]。1964年和1967年,美國航空[25]與美國西科斯基飛行器公司[26]分別提出了短距起降與垂直起降(S/VTOL)航空器在城市運營的初步構想。1972年,NASA[27]分別從飛行器設計、噪音污染、通信導航、空中交通管制、機場運行模式等方面對城市空中交通系統進行了深入地探討。1973年,南加利福尼亞大學(University of Southern California, USC)出版了城市空中交通與城市規劃專著[28],分別從形勢分析、法規政策、運行特點、環境影響等方面論述了城市空中交通發展的困難與可能性。1980年,休斯直升機公司[29]指出直升機運輸是滿足城市交通運輸需求的有力解決方式。總的來說,城市空中交通發展的第一階段主要源于直升機飛行服務的興起,在這一階段,城市空中交通運行概念初步形成。然而,由于直升機飛行事故頻發,最早進行直升機服務的洛杉磯航空公司與紐約航空公司分別于1971年[30]與1979年[4]停止運營,自此城市空中交通發展進入了低谷期。
第2階段:2003—2014年。2003年,伴隨著NASA個人飛行器(Personal Air Vehicle, PAV)概念的提出[31]以及按需運營(On-Demand)、門到門服務(Door-to-Door)空中交通運輸方式的興起[32],城市空中交通再次進入研究人員的視野。2006年,英國蘭卡斯特大學(Lancaster University)[33]分析了當代人們對于門到門空中飛行的渴望與需求,研究了巴西圣保羅直升機旅行服務的興起過程,展望了城市直升機航空旅行的未來與前景。2009年,美國Terrafugiai公司推出的全球首輛飛行汽車“飛躍/變形者”(Transition)[34]成功試飛,并于2012年進行換代升級。總的來說,由于城市人口不斷增長,人們對于城市空中交通運輸需求不斷增加,并且隨著航空技術的發展,航空事故率相較于20世紀80年代以前已經大幅度降低[35]。飛行汽車的概念,推動了汽車與航空器的融合,為城市空中交通運行帶來了新的可能。
第3階段:2014年至今。2014年,NASA首次提出了無人機交通管理(UAS Traffic Management, UTM)的概念[36],并于2016年對UTM運行概念(Concept of Operations, ConOps)進行了全面的闡述[37],這標志著無人機時代全面降臨。2016~2017年,南洋理工大學針對新加坡城市特點,也相應提出面向城市環境的無人機交通管理(TM-UAS)運行概念[38-39],促使小型無人機融入城市空中交通系統。與此同時,2016年,Uber發布了未來城市空中交通計劃白皮書[2],全面闡述了未來城市飛行汽車運營構想,引發了全球城市空中交通研究熱潮。2017年,NASA正式提出了Urban Air Mobility(UAM)這一專業術語[40],自此關于城市空中交通的研究層出不窮。
2.2 發展現狀
近些年來,隨著自動駕駛、人工智能、5G通信等技術的興起,城市空中交通迎來了新一批的研究熱潮。目前世界各國對于城市空中交通的研究進度不一,主要集中于城市低空小型無人駕駛航空器系統(small UAS, sUAS)的交通管理(UTM[37]、U-space[41]等)以及基于空中出租車、空中公交車等載人eVTOL航空器的UAM運行概念等方面。本文主要從美國、歐洲、中國以及其他國家和地區這4個角度對世界各國的城市空中交通發展現狀進行梳理。
1)美國。2016年,NASA、美國聯邦航空管理局(Federal Aviation Administration, FAA)以及美國工業界、學術界聯合研制了UTM運行概念框架[37,42],論述了UAS從非管制空域運行到管制隔離空域運行再到管制空域混合運行的階段性發展過程,制定了UAS技術能力(Technical Capability Levels, TCL)發展的4個等級,以此來逐步實現從視距內運行(Visual Line of Sight, VLOS)到超視距運行(Beyond VLOS, BVLOS)、從城郊人口稀疏區到城區人口稠密區、從人工手動控制到智能自動管理的轉變。目前,美國已經完成了TCL2與TCL3飛行測試與論證[43-45]。隨之,美國Uber公司在NASA以及學術界的幫助下,發布了未來城市空中交通計劃白皮書[2],結合VTOL航空器發展潮流,探究按需運行的城市空中交通運行模式,提出要建立像UTM一般的空中交通管理框架,實現城市空中交通與機場終端區的無縫銜接。2017年,NASA在此基礎上對按需運行的交通模式作出了更深入的探討[12,13]。2018年,NASA正式提出了UAM空域融合概念[4],并將UAM發展分為了3個階段:① 新興階段:沿固定航線進行低速度、低密度飛行;② 發 展階段:圍繞某一樞紐,實現小型立體網絡運行;③ 成熟階段:多樞紐、高速度、高密度運行。此外,美國MIT、UMich等也分別針對UAM的運行限制[5-7]與發展途徑[8]作出了進一步深入研究。
2)歐洲。2017年,歐盟與歐控成立的歐洲單一天空計劃(Single European Sky ATM Research, SESAR)聯合企業發布了U-space設計藍圖[41],旨在為歐洲未來無人機安全、高效、大規模混合運行提供一套新型智能服務程序。與美國UTM類似,U-space根據UAS自動化與連通等級的不同,將UAS服務發展分為了4個階段:基礎服務階段、初級服務階段、高級服務階段與全域服務階段。為了更好地推進U-space研究,同年9月,SESAR啟動了歐洲無人機交通管理系統運行概念(Concept of Operations for European UTM Systems, CORUS)項目,旨在面向包括機場附近超低空空域(Very Low Level, VLL),提出一套完善的歐洲UTM運行概念體系,該項目于2019年8月底結束,并于同年9月發布了U-space運行概念研究報告最終版[46-47]。目前,U-space下已啟動了19個項目來進行UTM第2階段論證與第3、第4階段的研究與探索[48]。此外,空客也在2018年發布了天空藍圖[3],從空域結構、系統架構、規則標準、發展規劃4個角度對未來城市自主航空器運行提出了一定的設計構想。
3)中國。中國目前正在逐步形成全國統一的民用無人駕駛航空器運行管理綜合平臺(Civil UAS Operation Management, UOM)[49],2018年1月,國家空中交通管制委員會辦公室組織起草了《無人駕駛航空器飛行管理暫行條例(征求意見稿)》,旨在規范無人機飛行活動,限制無人機活動范圍,明確無人機運行的法律責任,促進無人機產業安全健康發展。同年11月,中國民航局在深圳地區啟動了無人機飛行管理試點工作,正式上線了中國民航局無人駕駛航空器空中交通管理信息服務系統(Civil Aviation Administration of China UTM Information Service System, UTMISS)。通過UTMISS系統,可實現無人機限制區劃設,飛行計劃申請、信息數據共享等服務。2019年2月,民航局發布《特定類無人機試運行管理規程(暫行)》,使用無人系統規則制定聯合體(Joint Authorities for Rulemaking of Unmanned Systems, JARUS)推出的特定運行風險評估(SORA)方法[50],實施無人機安全風險管理,鼓勵并有序推進典型運行情景下無人機的試點與示范運行。2020年1月,億航智能發布《未來交通:城市空中交通系統白皮書》[11],從eVTOL飛行器設計、現實運行限制因素、未來應用與發展前景等方面對城市空中交通運行概念進行了多方位的闡述,展現了城市空中交通巨大的市場潛力,提出了全自動無人駕駛飛行器(Autonomous Aerial Vehicle, AAV)的概念,著重強調全自動無人駕駛且應用于載人載貨的飛行器設計理念。中國民用航空飛行學院的李誠龍等[51]提出了一種面向eVTOL航空器的城市空中交通運輸管理基本框架,綜述了空域規劃、地面基礎設施、交通運行控制3方面的研究現狀,初步探討了城市空中交通管理中的關鍵問題。本文結合自身研究基礎和初步成果,設計城市空中交通運行概念,構建適合我國的未來城市空中交通管理體系架構,圍繞空域規劃、流量控制、交通服務、基礎設施建設等四個核心內容,深入論述城市空中交通管理的研究領域、面臨挑戰和發展建議。
4)其他國家及地區。除了美國、歐洲與中國之外,日本、新加坡等國家及地區也發展了相應的城市空中交通系統。2016年4月,日本經濟產業省(Ministry of Economy, Trade and Industry, METI)發布了日本UAS運行四級發展規劃,力爭至2018年實現第3階段發展目標[52]。同年8月,日本無人機運行管理聯合體(Japan Unmanned System Traffic & Radio Management Consortium, JUTM)成立,并于2017年在福島進行UTM運行概念飛行試驗[53-54]。2018年12月,METI發布了日本未來空中交通變革路線圖,促進城市空中交通大規模商業化運營的逐步實現[55]。同樣地,新加坡民航局(Civil Aviation Authority of Singapore, CAAS)與南洋理工大學面向新加坡城市人口密度極高的獨特環境,聯合研制了面向城市的無人機交通管理系統(Traffic Management of UAS, TM-UAS)[38,39]。
3 城市空中交通管理體系框架
盡管中國在無人機交通管理方面有著較為豐碩的成果[56],大疆無人機、億航全自動無人駕駛飛行器的研制方面也處于世界領先地位,然而中國對于城市空中交通管理的研究才剛剛起步,城市空中交通的管理模式也尚不明確。因此,本文將結合無人機交通管理(UTM)的前沿理念與傳統空中交通管理(ATM)的成熟經驗,對中國城市空中交通管理體系框架進行初步的研究與探索。
3.1 運行概念設計
3.1.1 設計范圍
在進行城市空中交通(UAM)管理運行概念設計之前,首先需要明確UAM運行的范圍與狀態,設計規劃未來UAM發展的不同等級與階段。NASA[4]基于飛行密度與公眾接受度將UAM的發展分為了新興、發展與成熟3個階段,無人機交通管理(UTM)基于運行環境與自動化水平也被劃分為了4個技術能力等級[37]。雖然目前城市范圍內無人駕駛航空器系統(UAS)、垂直起降航空器(VTOL)與傳統通用航空器的運行模式相互獨立發展,但是未來UAM所面臨的必然是這3種類型航空器高密度、大規模混合飛行。因此,本文參考NASA關于UAM與UTM的發展階段劃分方法,根據運行環境、自動化等級以及空域融合程度的不同,將UAM的發展劃分為興起、初級、高級、成熟4個階段。
1)UAM興起階段:在該階段,UAS與VTOL各自獨立運行,且均在機場管制空域以外的低空區域。根據無人機交通管理(UTM/UOM)的運行限制,UAS主要在120 m以下的城市低人口密度區進行視距內(VLOS)運行,無人機的安全運行責任主要由地面飛手承擔;120~150 m為過渡緩沖地帶,VTOL應當在150 m以上的低空空域運行,且與通用航空類似,VTOL的安全能力主要依靠航空器駕駛員提供。此時,UAM基本處于試運營階段,城市空中交通管理部門主要負責提供可用空域劃設、飛行計劃審批、空域動態監視、靜態電子圍欄等服務。
2)UAM初級階段:在該階段,UAS與VTOL依然是各自獨立運行,但可在機場附近劃設隔離空域作為UAS活動區,且VTOL能夠進入機場管制空域并實現機場起降。隨著自動化技術的提升,UAS的飛行控制權逐漸移交到機載飛控系統,地面飛手主要起飛行監視與應急處理的作用,UAS可以進行低密度、低流量的超視距(BVLOS)運行。相應地,VTOL開始具備巡航自動駕駛功能,且能夠在限定的中低人口密度區,實現低流量的點對點按需運行。此時,UAM處于運營初級階段,已初步形成UAM航路網絡干線結構,如圖1所示。城市空中交通管理部門主要負責提供可用空域規劃、飛行計劃管理、空域實時監控、動態電子圍欄等服務。
圖1 城市空中交通發展初級階段概念圖
3)UAM高級階段:在該階段,UAS與VTOL開始逐步混合運行,VTOL運行空域與機場附近管制空域開始融合,滿足所需性能的VTOL在管制員許可下可以在管制空域與傳統飛機進行混合飛行。UAS的飛行高度將不再限制為120 m以下,VTOL也逐漸發展為全自動無人駕駛飛行器(AAV),具備完全自主的無人駕駛飛行功能。地面飛手可以在系統輔助下進行一對多的BVLOS飛行,VTOL駕駛員將主要承擔飛行過程中應急監控的責任。此時,UAM處于運營高級階段,已形成UAS/VTOL相互融合的城市低空航路網絡,能夠實現中等密度、中等流量點對點按需運行。由于UAM運輸需求具有實時性,該階段UAM飛行計劃無需審批,僅需報備,皆由信息系統自動提交處理。飛行沖突主要依靠機載探測與防撞系統(Detect and Avoid, DAA)或駕駛員協商避讓解決。城市空中交通管理部門主要提供航路網絡規劃、終端或航路流量控制、防撞避險告警、事故應急處置等服務。
4)UAM成熟階段:在該階段,城市低空空域與機場管制空域高度融合且無縫銜接,所有類型的UAM航空器均為全自動無人駕駛飛行器(AAV)。UAS與VTOL合并,形成垂直起降無人駕駛航空器系統(VTOL UAS),為UAM提供載人載貨的運輸服務。此時,UAM處于高度智能自主的成熟階段,城市空域已形成高密度、高流量的精細柔性動態航路網絡結構。UAM的運行調度、優化排序、航跡規劃等一系列最優化問題均由城市空中交通管理系統統一處理。由于風切變、系統故障等不可控原因,UAM航空器發生飛行沖突,由DAA系統進行自主避讓調控。城市空中交通管理部門主要提供UAM系統監控與事故應急管理等服務。
3.1.2 設計內容
根據上述UAM發展階段劃分,目前中國正處于UAM發展的興起階段。由于中國無人機交通管理平臺UOM建設起步較早,無人機設計、制造、適航、生產、運營、管理等已形成一條較為完整的無人機產業鏈,而電推進垂直起降航空器(eVTOL)還處于設計與試飛階段。然而,考慮到未來UAM運行管理需求以及UAS與VTOL混合運行趨勢,本文將主要針對UAM發展前3個階段(尤其是UAM高級階段),從空域規劃、流量控制、交通服務和基礎設施建設4個方面,設計城市空中交通管理運行概念。
1)空域規劃
空域規劃應當是一種偏向戰略型的城市空中交通管理模式,但是有時也會根據實際運行需要,進行實時動態調整,通常涉及以下3個方面:
① 空域劃設:根據某種分類標準,規定不同類型空域的運行限制,從而劃設空域的時空范圍。比如根據是否可飛,可以將空域劃分為禁飛區、限飛區、適飛區等;根據飛行自由度,可以將空域劃分為自由空域、分層空域、扇形空域、管道空域等[57]。空域類型決定了空域的用途,在同一類型空域內運行的航空器具有相似的特點,某一塊空域可能對應多種空域類型。
② 航路網絡:由于城市低空時空環境復雜多變,在UAM中,航路應當具有更加廣泛的含義。根據空域結構的不同,(廣義)航路可相應分為:自由航路、分層航路、扇形航路、管道航路等。已知某一空域的結構與進出點對,即可確定該空域內(廣義)航路的連通特征[58]。因此,航路網絡規劃可定義如下:以某種特定的運行方式,通過相鄰空域進出節點,將不同類型或不同結構的空域順次連通,在達到空域安全目標水平的同時,盡可能地提高空域運行效率,滿足用戶需求。航路網絡規劃示意圖如圖2所示。
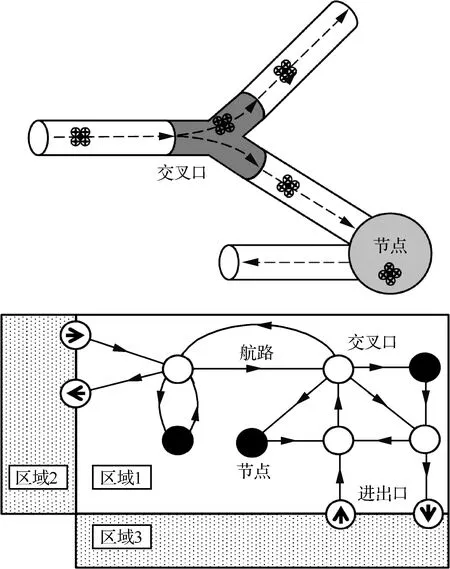
圖2 城市空中交通航路網絡規劃示意圖[58]
③ 容量評估:UAM容量評估主要是評估航路網絡的通行能力。其中包括UAM計劃階段的半靜態容量評估與UAM運行階段的動態容量評估。一方面,容量評估為流量控制與交通服務奠定基礎;另一方面,它也反映航路網絡規劃是否合理,能否滿足實際飛行需求。
2)流量控制
流量控制應當是一種戰術與實時并存型的城市空中交通管理模式。傳統空中交通流量管理根據實施時間不同,可分為先期流量管理、飛行前流量管理與實時流量管理,且以先期與飛行前流量管理為主,而實時流量管理為輔,主要采取的流量控制措施有地面等待策略、空中等待策略、改航策略等。然而,在城市空中交通發展高級階段,UAM多為按需運行,其實時性、動態性較強,空域態勢較為復雜,可預測性相對較低,僅通過先期或飛行前的流量控制策略,難以適應UAM的實時變化,從而無法解決UAM容流不平衡問題。因此,城市空中交通流量控制應當以實時流量控制為主:將流量控制作用于航路網絡節點,實現類似于地面交通的信號控制作用[59],促使航空器實施改航、空中等待、地面等待等策略,以此來實現航路網絡交通流的自適應調控,其示意圖如圖3所示[59]。

圖3 城市空中交通流量控制示意圖[59]
3)交通服務
交通服務應當主要包括交通信息服務、交通規劃服務、交通安全服務等。
① 交通信息服務是指向用戶提供航行情報等一切與UAM用戶飛行相關的信息或數據,可由用戶通過網絡進行查詢或由系統智能通告。
② 交通規劃服務主要是指航跡規劃:在已知起訖點的情況下,能夠通過既有航路網絡來提供一條時間最短或能耗最低的可行航線,以確保航空器能夠順利完成交通運輸任務。
③ 交通安全服務是交通服務的核心業務,主要包括安全間隔、防撞告警、風險預警、應急處置等服務。其中,風險預警服務除了對非法侵入、系統失效、危險接近等風險進行預警之外,還包括對公共安全的風險預警,若航空器接近人口密集區且無法達到等效目標安全水平(Equivalent Level of Safety, ELOS)[60],則系統自動啟動風險緊急預警。通過交通安全服務,可以確保城市空中交通安全有效運行。
4)基礎設施
基礎設施主要分為垂直起降機場(Vertiport)與通信導航監視(Communication, Navigation, Surveillance, CNS)設施:
① 垂直起降機場布局應當考慮UAM運輸需求,建立垂直起降場、垂直起降站、垂直起降點的三級協同布局運輸體系,科學配置公共運輸航空器數量、起降站與起降點布局以及三級場址之間的協調關系,實現UAM高效運行。其中,垂直起降點可分為機動型與固定型,機動型主要分布在地面道路附近,可實現汽車到飛行汽車的靈活轉換[61],示意圖如圖4所示;固定型可分布在樓頂、公園、社區等可用空間狹小的公共區域。
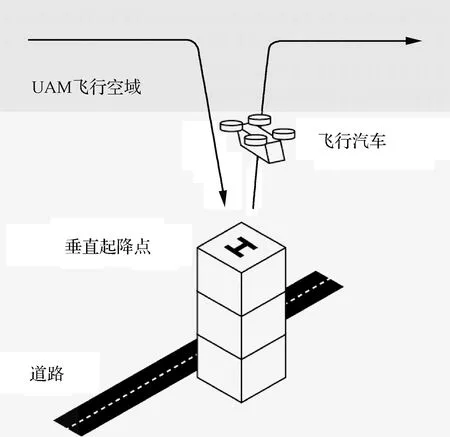
圖4 城市空中交通機動型垂直起降點示意圖[61]
② 通信導航監視設施可在現有設施的基礎上進一步拓展。通信:充分利用互聯網協議技術標準IPv6(Internet Protocol version 6)以及 5G通信技術的優勢,實現空對空、空對地、地對地通信網絡的無縫銜接,從而提供端到端的通信服務[4]。導航:在傳統地基導航的基礎上,利用全球衛星導航系統(Global Navigation Satellite System, GNSS),尤其是中國北斗衛星導航系統(BeiDou Navigation Satellite System, BDS),在北斗地基與星基增強系統的作用下,可為未來UAM大規模運行提供精準定位與導航。監視:利用廣播式自動相關監視(Automatic Dependent Surveillance-Broadcast, ADS-B)等協作式監視技術與高分辨率攝像機監視系統、紅外探測系統等非協作式監視技術,為UAM運行提供全方位精密監視服務。此外,UAM航空器本身也可作為城市智能交通運輸系統的網絡節點,與地面通信導航監視系統實現協同運作、信息共享,促進城市空間信息網絡互聯互通[1,62-63]。
3.2 體系結構框架
目前,中國城市空中交通的發展才剛剛起步,遠未形成一個完整的城市空中交通管理體系框架。因此,在UAM運行概念設計的基礎上,根據中國空情特點與空管政策,參考國內外無人機交通管理(UOM/UTM)體系的建設經驗以及UAM的發展方向,提出了中國未來城市空中交通管理體系框架,該體系框架主要由城市空中交通管理平臺、城市空中交通信息網絡、城市空中交通運營商以及數據支持共享服務方等組成,體系結構如圖5所示。其中:城市空中交通管理平臺主要由各級管理部門組成,包括空管局、交通局、公安局等。城市空中交通信息網絡與國家空域信息系統數據庫對接,集成城市空中交通管理、運營與服務所需的空域信息。城市空中交通管理平臺通過城市空中交通信息網絡為各城市空中交通運營商提供流量控制、間隔保持、風險預警、航行情報等交通服務。城市空中交通運營商提供自身飛行計劃信息并接受城市空中交通管理平臺的各類服務。數據支持共享服務方利用5G網絡、北斗衛星等通信、導航、監視設施為城市空中交通管理方與運營方提供運行數據支持。
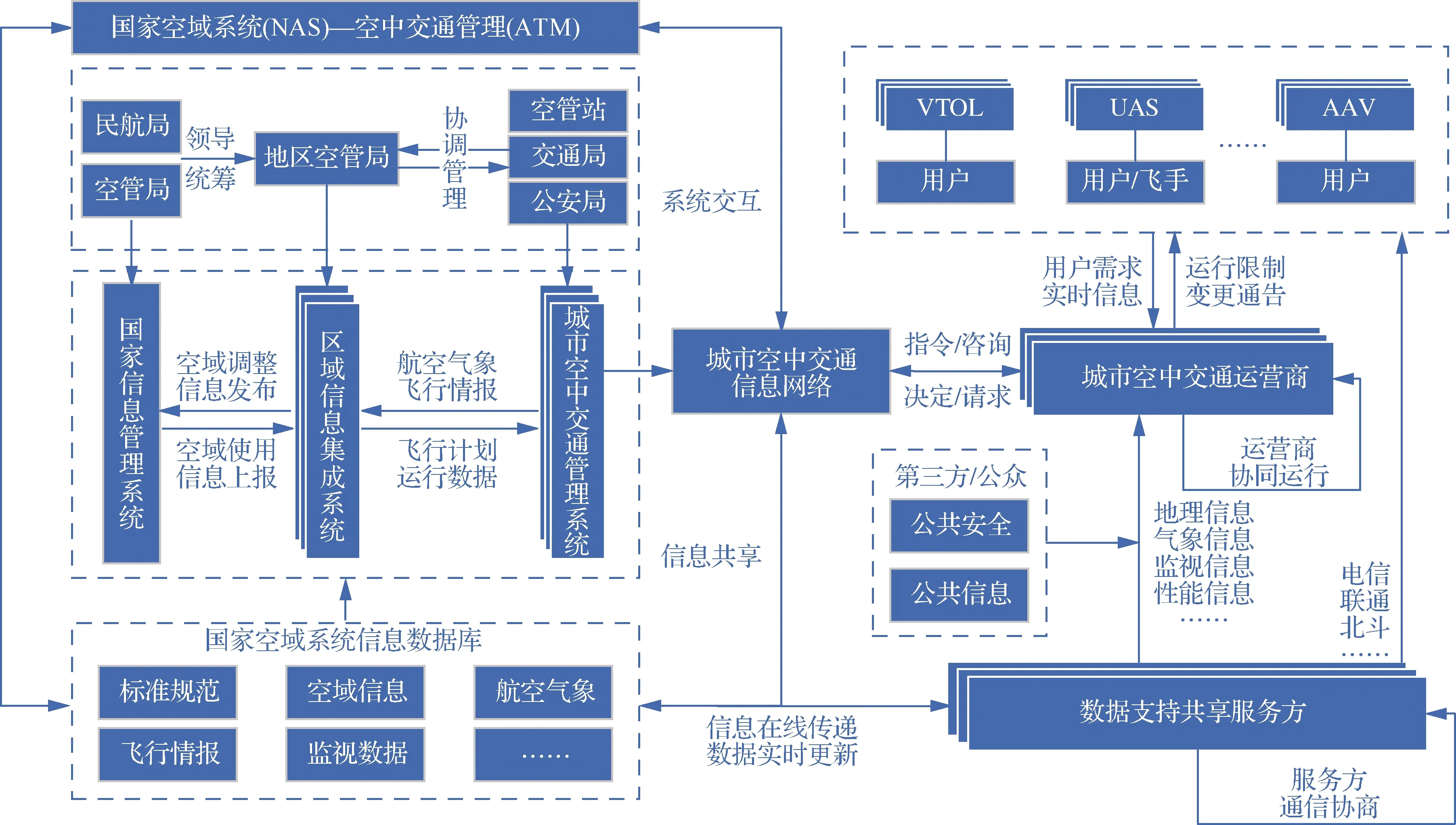
圖5 中國未來城市空中交通管理體系框架
1)城市空中交通管理平臺:城市空中交通管理平臺由國家信息管理系統、區域信息集成系統、城市空中交通管理系統共同組成,形成三級城市空中交通管理體系。
① 國家信息管理系統主要由民航局或空管局負責統籌建設,主要功能包括:收集全國UAM運行區域氣象情報、航空情報原始資料,制作并發布UAM航空情報產品;掌握全國UAM空域使用信息,匯總全國UAM飛行計劃及運行數據,不定期發布空域調整計劃。
② 區域信息集成系統主要由地區空管局負責統籌建設,其主要功能包括:收集并上報區域內UAM航空情報原始資料、飛行計劃及運行數據等信息,向區域內各類城市空中交通管理系統提供UAM航空情報產品,負責協調集成各類城市空中交通管理系統,著重協調管理城市交界處的交通服務或管制移交程序。
③ 城市空中交通管理系統主要由地區空管局協調、空管分局(站)與市交通局、公安局等共同建設。城市空中交通管理系統是城市空中交通管理體系的重要支撐,是面向UAM運營商與用戶的終端服務管理平臺。城市空中交通管理系統主要功能包括:向所在城市服務范圍內各項飛行活動提供空域管理、流量控制、航行情報、安全間隔、防撞告警、風險預警、應急處置等服務,向區域信息集成系統提供UAM飛行計劃及運行數據等信息。
2)城市空中交通信息網絡:城市空中交通信息網絡是一個由民航局統一構建與管理的信息共享網絡平臺。城市空中交通管理平臺可通過該信息網絡直接與UAM運營商對接,發布交通管制指令,響應用戶實時需求,收集動態運行數據,向運營商及用戶提供相關飛行服務。
3)城市空中交通運營商:城市空中交通運營商是實體單位,包括城市VTOL航空器制造商、城市空中公交車運營商、城市空中出租車運營商、城市VTOL機場運營商,以及城市空中物流運營商等。運營商之間進行內部溝通與協作,以協同、重疊或耦合的方式,增強UAM整體運營服務能力,從而有助于城市空中交通安全、高效、有序運行。
4)數據支持共享服務方:用戶可通過城市空中交通運營商網絡訪問數據支持共享服務方以獲取必要的或增強的數據服務,如地理信息、氣象信息、監視信息、性能信息等。數據支持共享服務方還可以通過其他網絡(如公共或私有網絡站點)直接向用戶提供數據支持。
4 城市空中交通管理研究現狀
目前國內外關于城市空中交通管理的研究仍處于起步階段,相關新興概念與方法可歸納成空域規劃、流量控制、交通服務和基礎設施建設4個方面,下面分別綜述其研究現狀,以期為中國城市空中交通發展提供參考和借鑒。
4.1 空域規劃
空域是一種重要的自然資源,是航空器運行的必不可少的環境空間。相較于傳統高空空域,城市空域資源更加有限,航空器運行更加密集。因此,如何合理地進行城市空域規劃配置以增大城市空域容量、有效利用空域資源是城市空中交通首要解決的問題。本節將從空域劃設、航路網絡與容量評估3個方面綜述當前關于城市空中交通空域規劃方面的研究。
4.1.1 空域劃設
目前UAM空域范圍與空域結構均沒有明確定義。在UAM發展初級階段,空域劃設范圍主要參考現有民航空域劃設標準。正如1.1節中所述,中國UAM主要在低空空域運行。北京航空航天大學的全權等[56]在低空無人機交通管理的研究中提出將無人機的飛行高度限制由120 m拓展至300 m,根據機型與任務類型劃分無人機飛行高度層。這一空域范圍劃設思路也符合本文所設計的UAM高級階段的發展要求。
城市空域與傳統高空管制空域不同,必須考慮由建筑物、地形等固定障礙物以及飛鳥、氣球、煙花等移動障礙物所產生的地理空間復雜性[64]。合適的城市空域結構將大大提升UAM運行的經濟性與安全性。荷蘭代爾夫特理工大學(Delft University of Technology, TU Delft)與荷蘭國家航空航天實驗室(National Aerospace Laboratory, NLR)等研究機構提出了自由空域(Full Mix)、分層空域(Layers)、扇形空域(Zones)、管道空域(Tubes)4種城市空域結構概念如圖6所示[57,65-71],分別研究了空域結構對于城市空域安全[68,71]、容量[57,65,68-69]、噪聲[66]、復雜性[67]的影響,提出了有別于地理圍欄(Geofencing)、空域圍欄(Geocaging)的向量圍欄(Geovectoring)的概念[70],通過限制航空器的相對飛行速度,以此來減少空域結構復雜度,從而提高城市空域容量與運行效率。TU Delft與NLR的諸多研究結果表明,分層空域在安全、效率、噪音等各方面表現皆為最優,是目前最適合城市空域運行的概念結構。
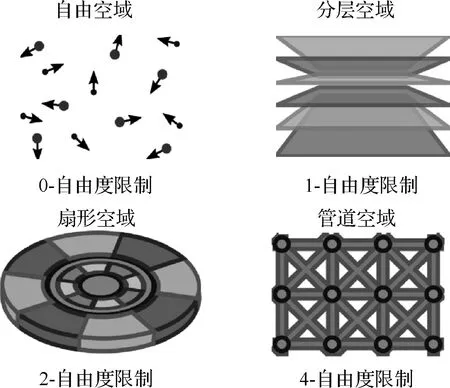
圖6 4種空域結構設計概念[65]
NASA的Jang等[59]受到了地面道路交通的啟發,提出了3種應用于高層建筑之間的多層通道型空域結構設計概念:空中車道(Sky-lane)、空中管道(Sky-tube)和空中走廊(Sky-corridor)。其中,每種設計概念均有不同的飛行自由度,用以約束與限制航空器運行,且在通道交叉口設置“空中紅綠燈”進行城市空中交通流的引導與控制。隨之,NASA的Lowry[72]提出了螺旋式空中電梯(Elevators)的概念,通過減少航空器爬升與下降所占空域體積,來提升城市可用空域容量。韓國科學技術高級研究所(Korea Advanced Institute of Science and Technology, KAIST)[73]提出了基于地形圖與骨架圖的城市空域幾何與拓撲特征提取方法,通過地形圖提供城市空域三維可用空間的數字度量,通過骨架圖挖掘城市空域各個組成部分的潛在連通性,從而更好地抽象與結構化城市空域,提升空域的運作能力。
4.1.2 航路網絡
城市空中交通航路網絡主要由空中航路結構與地面網絡節點組成,其中地面網絡節點代指垂直起降機場,而關于垂直起降機場布局規劃的研究將在4.4.1小節進行重點討論。本小節主要針對航路網絡的空中航路結構,對現有研究進行梳理和總結。
目前關于城市交通航路網絡的研究尚不多見,2016年,加拿大滑鐵盧大學(University of Waterloo, UW)[58]針對航路網絡結構進行了初步的定義與設計,提出了航路(Airways)、航路交叉口(Intersections)、航路節點(Nodes)、空域區域(Zones)、區域進出口(Inbound and Outbound Gates)等概念,將航路網絡拆分成若干通過進出口(Gates)相互連接的區域,通過航路與航路交叉口的有序交替序列實現地面網絡節點的連通。這種設計思路與本文3.1.2節中對航路網絡的定義類似,然而它僅僅將航路定義為一條具有寬度的空中通道,而沒有考慮航路的多樣化結構。2017年,澳大利亞昆士蘭科技大學(Queensland University of Technology, QUT)[74]做出了世界上首次關于UAS航路網絡結構建模的嘗試:首先,采用基于數據驅動的建模與分析方法,在不影響現有空中交通運行狀況的條件下,選擇適合嵌入UAS航路網絡的城市低空可行區域;然后,利用改進K-centers聚類算法,搜索候選網絡節點位置;最后,基于圖論與K最近鄰(KNN)分類算法,確定無人駕駛交通網絡的航路結構。2018年,新加坡南洋理工大學[75]提出了3種類型的城市低空航路網絡設計概念:矩陣節點型航路網絡(AirMatrix Network)、建筑節點型航路網絡(Over-buildings Network)、道路沿線型航路網絡(Over-roads Network),并通過容量與吞吐量指標,比較了這3種航路網絡的運行能力。緊接著,提出了適應性城市空域的概念(Adaptive Urban Airspace, AdUrA),以不同類型的航路網絡來滿足不同的城市空中交通運輸需求。
4.1.3 容量評估
空域容量評估通常建立在空域劃設與航路網絡規劃的基礎上,用以評估空域可用性以及航路網絡通行能力。只有明確空域最大或最佳可容納航空器數量,才能更好地進行城市空域管理、流量管理以及空中交通服務。
在城市低空空域容量評估的研究方面,加州大學伯克利分校(University of California, Berkeley)的Bulusu等做出了許多貢獻[76-80]。2017年,Bulusu和Polishchuk[76]提出了一種基于閾值的低空空域容量評估數學方法。該方法將空域容量定義為:隨著交通密度的增加,使空域評估指標(比如沖突率等)發生相變的空中交通量最小值。因此,通過確定空域評估指標與空中交通模型(用于構建仿真場景),即可利用仿真實驗評估低空空域容量。Bulusu和Polishchuk[76]選取了多機沖突率(四機或四機以上同時發生沖突的概率)作為空域安全性評估指標,用以驗證其所提出的空域容量評估方法的合理性與可行性。隨之,Bulusu等[77]又在此基礎上加入了每飛行小時危險接近率安全評估指標與成本增加量效益評估指標[81],進一步完善了基于閾值的空域容量評估方法,并且發現安全可能是空域容量的決定性因素。此外,Bulusu等[78]還對比研究了非合作類與合作類無人機在城市環境下的空域容量變化,結果表明,合作類無人機可以有效提高空域容量,并且減少機載沖突探測、解脫、避讓系統的計算復雜度。2018年,Bulusu等[79]又提出了吞吐量空域容量評估指標,并且將效益指標中的成本增加量修改為飛行時間延長百分比。在基于懸停避讓、人工勢場和ICAROUS[82]3種沖突解脫算法的仿真實驗下,分別從安全、效益與吞吐量3個角度,對比分析了基于閾值的空域容量評估方法所得出的容量評估結果,最終表明,吞吐量指標可以用來度量空域容量,并且相較于安全與效益指標,吞吐量可能更適合作為沖突探測與解脫算法的有效性評價指標。南洋理工大學[75]在比較航路網絡設計概念時,除空域容量之外,也采用了吞吐量指標來描述城市空域的性能。除了Berkeley之外,KAIST[65]提出了一個城市空域容量拓撲分析框架,能夠有效地識別城市可用空域。該文獻對比分析了禁止飛入(Keep-out)、禁止飛出(Keep-in)以及二者混合的地理圍欄概念,結果表明,禁止飛出地理圍欄具有更強的魯棒性,且能夠為城市空域提供最大空域容量。(其中,禁止飛入地理圍欄通常指地理圍欄(Geofencing)[70],而禁止飛出地理圍欄通常指空域圍欄(Geocaging)[70],有時也指動態地理圍欄[83])。
4.2 流量控制
空域規劃為城市空中交通運行構建了可行的物理空間,充分利用了空域的空間資源。然而,隨著未來城市空中交通發展規模不斷擴大,如何合理地分配空域時間乃至時空資源,是城市空中交通運行下一步需要解決的關鍵問題,這也就是流量控制問題。本節將主要從運行調度與終端排序這2個方面綜述當前關于城市空中交通流量控制方面的研究
4.2.1 運行調度
關于城市空中交通運行調度方面的研究,2017年,Balakrishnan和Chandran[84]首次嘗試在空域與機場資源配置問題中考慮無人駕駛航空器系統(UAS),并提出了一種分布式整數規劃方法來解決無人機存在時大規模空中交通流量管理問題,該方法考慮了飛行連通性約束、機場和空域容量約束以及地理圍欄約束,使用列生成算法確定航空器群體最佳時空軌跡。2018年,愛荷華州立大學(Iowa State University, ISU)的Brittain和Wei[85]提出了一種新穎的分層深度強化學習算法,將航空器作為智能空中交通控制系統的核心組成部分進行間隔和排序,安全、自主、高效地解決了航空器在運行調度中的改航、調速等問題,實現了全自動空中交通管制系統在結構化空域中對航空器的自動間隔和排序功能。2019年,ISU[86]針對UAM按需運行特性,提出了一種按需服務與計劃服務相結合的UAM混合運營概念,構建了滿足UAM運行限制與市場需求的新型運行管理模型,采用混合整數二次規劃方法,在利潤最大化目標下,解決了UAM運行調度問題。普渡大學(Purdue University, PU)[87]提出了一種基于流體排隊模型的彈性無人機流量控制算法,建立了符合實際且易于處理的無人機交通流模型,分析了無人機交通系統性能,解決了未來城市空中交通系統在天氣不確定條件下的擁堵問題。斯蒂文斯理工學院(Stevens Institute of Technology, SIT)[88]針對智慧城市中無人機調度問題,提出了3種低復雜度算法,該算法采用降維方法將原問題求解運行時間最小化,通過一種迭代式方法來減少混合整數線性規劃的計算復雜度,提高了無人機運行調度效率。2020年,佐治亞理工學院(Georgia Institute of Technology, GT)[89]提出了一種多物網絡流框架,用于優化未來UAM機場空中出租車服務運行調度問題,該框架在亞特蘭大地區機場空中出租車系統的應用中取得了良好的效果。
此外,為了更好地研究城市空中交通運行方面的問題,NASA分別為低空空域運行[90]、UTM[91]、UAM[92]設計并開發了仿真研究平臺與算法。其中,針對城市空中交通網絡的自動化管理,NASA[92]擴展了為傳統民航開發的高度自動化的自動調節器(AutoResolver),用以對城市自動駕駛航空器進行持續飛行軌跡管理,保證了航空器之間的安全間隔,減少了高密度空域下空中交通的延誤。UAM自動調節器應用結果表明,自動調節器可有效地避免UAM航空器危險接近,并且當計劃調度時間范圍大于UAM航班持續時間時,大部分沖突均在起飛前得以解決,從而產生地面延誤;而當計劃調度時間較短時,大部分沖突在起飛后得以解決,從而產生空中延誤。
4.2.2 終端排序
關于城市空中交通終端排序方面的研究,目前主要以ISU與TU Delft大學為主[93-98]。首先,ISU的Pradeep與Wei研究了雙傾轉旋翼縱列式(Tandem Tilt-wing)eVTOL航空器[96]與多旋翼eVTOL航空器[97-98]的終端到達軌跡問題,提出了一種以能量消耗為性能指標的多相最優控制算法,在所需到達時間(Required Time of Arrival, RTA)的約束下,構建了一種優化控制框架,確保eVTOL航空器在RTA約束下能夠生成最為高效節能的終端到達軌跡。Pradeep與Wei重點以Airbus Vahana[96]與EHang 184[97-98]進行了案例分析與框架驗證。然后,TU Delft的Kleinbekman等與ISU的Wei等[94]針對eVTOL航空器最佳RTA計算問題,以最小化延誤為目標,考慮eVTOL電池剩余電量約束與垂直起降場容量約束,在保證航空器安全間隔的情況下,首次提出了基于混合整數線性規劃的最佳RTA計算方法。并且在之前構建的效能最優軌跡生成工具[96-97]的基礎上,提出了垂直終端區空域設計概念,為城市空中交通eVTOL終端排序的研究奠定了基礎。與此同時,ISU的Pradeep與Wei[95]也提出了一種用于終端著陸排序的啟發式算法,該算法采用插入局部搜索,結合混合整數線性規劃與時間推進算法,對混合eVTOL機群的著陸時序進行優化。經驗證分析,該算法具有實時優化排序的能力。2020年,ISU的Bertram與Wei[93]又提出了一種垂直起降機場終端區進場運行概念,如圖7所示,通過環(Ring)與門(Gate)控制eVTOL進場順序。在此運行概念基礎上,構建了一種基于馬爾可夫決策過程的城市空中交通自組織終端排序算法,可以及時處理高密度情況下UAM航空器接近垂直起降點的情況,能夠很好地解決UAM終端排序問題。
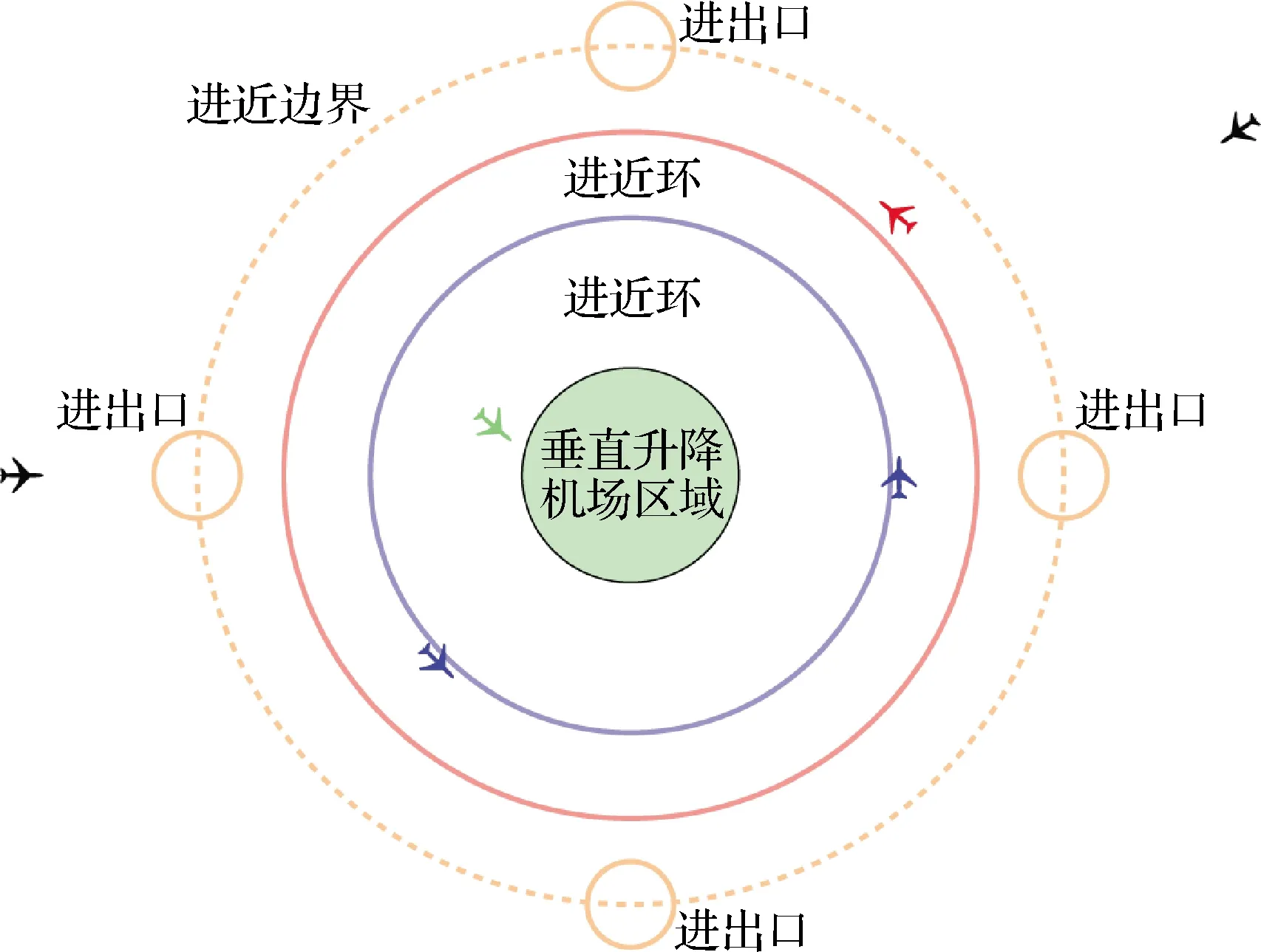
圖7 垂直升降機場終端區運行概念[93]
4.3 交通服務
空域規劃與流量控制主要從宏觀層面優化配置城市空域時空資源,在實現UAM運行的同時盡可能地提高城市空域資源的利用效率;而交通服務主要從微觀層面銜接引導航空器無縫融入城市空域系統,為UAM運行帶來實際的可能。由于交通安全問題是UAM的首要問題,防撞告警、風險預警與應急響應服務應當是交通服務的核心業務。因此,本節將主要從航跡規劃、防撞避險、應急管理3個方面綜述當前關于城市空中交通服務方面的研究。
4.3.1 航跡規劃
傳統航跡規劃算法主要可分為2大類:最優化算法與啟發式算法。最優化算法適用于小范圍局部搜索,可以求得航跡規劃問題的最優解。然而,隨著算法搜索區域的增加,其計算量呈指數倍增長。相對地,啟發式算法引入了啟發式函數,能夠在可接受的時間范圍內給出一個可行解,這樣的處理方式大大減少了實際運算量,提高了航跡規劃的效率,然而,正因如此,啟發式算法很難規劃出全局最優航跡。啟發式算法可以分為隨機型搜索算法和確定型搜索算法,具體包括人工勢場法、遺傳算法、蟻群算法、啟發式A*算法、動態規劃等。
2017年,美國航天研究所(National Institute of Aerospace, NIA)與NASA[99]為無人機在低空空域超視距(BVLOS)飛行設計了一種動態航跡規劃算法,該算法將快速探索隨機樹規劃技術與形式化驗證方法相結合,能夠保證無人機在動態航跡規劃過程中與其他航空器或地理圍欄之間保持一定的安全間隔。該算法還應用了一個啟發式函數,用以判斷何時終止隨機樹擴展,能夠有效地減少航跡規劃算法的運行時間。賓夕法尼亞大學(University of Pennsylvania, UPenn)[100]提出了一種基于搜索的航跡規劃算法,該算法利用最優控制思想,能夠在合理的時間范圍內規劃出高維空間的最優飛行航跡,解決了基于搜索的航跡規劃算法普遍的擴展節點數量龐大的問題。通過求解線性二次最小時間問題的顯式解,能夠有效地生成復雜障礙環境下四旋翼無人機在離散空間最優的動態可行航跡。此外,該算法還能夠在動態環境中,對四旋翼無人機飛行航跡進行快速在線重新規劃。Berkeley[101]也將多旋翼無人機系統的航跡規劃問題看作是最優控制問題,提出了一種基于能耗最低的航跡規劃方法:在航跡規劃一般公式的基礎上,考慮無人機地速不變,僅優化無人機航跡導航方向,采用有序迎風法,實現多旋翼無人機最優航跡的數值求解。2019年,SIT等[102]考慮了城市環境下多旋翼無人機的航跡規劃問題,提出了無人機在航跡規劃過程中的3種防撞方式:懸停、調高與改航。于是,在考慮無人機防撞與充電站約束條件下,分別采用了混合整數線性規劃、有序迭代與步進迭代的啟發式算法求解多旋翼無人機最優與次優航跡。仿真結果表明,啟發式算法不僅能夠提供較快的收斂速度,其結果也接近于最優。NASA[103]根據其UTM第四級技術能力(TCL4)的要求,提出了一種基于遞歸樹的無人機實時局部航跡規劃算法。該算法能夠通過V2V(Vehicle to Vehicle)通信與航跡預測模塊,實時感知周圍航空器的飛行動態,從而能夠在城市復雜空間環境下規劃出一條安全可行的飛行航跡。2020年,ISU的Bertram與Wei[104]提出了一種基于馬爾科夫決策過程的UAM航跡規劃算法,該算法能夠在UAM航跡規劃過程中有效地解決高密度UAM多機航跡協作式與非協作式碰撞避免問題。圣地亞哥州立大學(San Diego State University, SDSU)[105]考慮了UAM電動飛行器(Electric Aerial Vehicles, EAV)的電池續航性,提出了一種電池充電計劃與EAV飛行航跡聯合規劃方法:首先建立EAV航跡規劃的混合整數線性規劃模型,然后采用分布式的啟發式算法,實現EAV能耗最低航跡的快速規劃。
4.3.2 防撞避險
城市空中交通的防撞避險問題主要涵蓋2個方面:空中風險(防撞)與地面風險(避險)。其中,空中風險主要是指載人航空器之間碰撞所帶來的機載人員的安全風險,而地面風險主要是指由于系統故障、空中碰撞等原因而導致航空器墜機所帶來的地面人員的安全風險。關于這兩種安全風險的研究與應用可以細分為風險評估與風險緩解或風險規避。其中,對于空中風險而言,風險評估特指沖突概率估計或碰撞風險評估,主要用于沖突探測告警或安全間隔標定,而風險緩解或風險規避特指沖突解脫或碰撞避免,防止航空器發生相撞,保障航空器安全運行。
1)空中風險
傳統高空航空器的沖突探測與解脫方法研究較為成熟,比如美國的空中交通預警與防撞系統(Traffic Alert and Collision Avoidance System, TCAS)、歐洲的機載防撞系統(Airborne Collision Avoidance System, ACAS)以及MIT林肯實驗室提出的下一代機載防撞系統ACAS-X[106]等。1997—1999年,NASA的Paielli和Erzberger[107-108]提出了面向自由飛行的航空器沖突概率估計方法,通過多維高斯分布飛行誤差概率分布假設與直角坐標系線性變換,建立了航空器相遇沖突概率估計解析計算模型,為概率型沖突探測的幾何分析方法奠定了堅實的研究基礎。2000年,MIT的Kuchar與Yang[109]在NASA的支持下,分別從飛行維度、沖突探測、沖突解脫、解脫行為與是否多機沖突等方面,對63篇關于沖突探測與解脫方面的文獻進行了綜述與總結,為2000年以后的研究提供了重要的參考價值。
近年來,隨著多旋翼無人機的興起,關于無人機沖突探測與解脫方面的研究也愈發火熱。2016年,斯坦福大學(Stanford University)的Mueller和Kochenderfer[110]針對多旋翼無人機系統,提出了一種基于ACAS-X拓展的防撞算法:將多旋翼無人機的防撞問題建立為部分可觀測的馬爾科夫決策過程模型,針對ACAS-X防撞算法只能進行調向和調高的限制與不足,將水平面的二維速度調整策略加入到防撞算法中,并利用動態規劃方法對無人機防撞機動策略進行優化求解。與此同時,Mueller和Kochenderfer[111]又對比分析了4種可以應用于多旋翼無人機的防撞算法:基于部分可觀測馬爾科夫決策過程的防撞算法(QMDP)[110]、基于模型預測控制的滾動時域方法(MPC)、人工勢場法(PF)、改進水平矢量轉彎算法(HVT)。仿真分析結果表明,這4種算法都能夠在航線偏離與間隔保持之間做出很好的權衡,其中,QMDP在速度調整幅度上具有明顯優勢。2017年,斯坦福大學的Ong和Kochenderfer[112]基于多智能體的馬爾科夫決策過程描述無人機動力學、外部環境與飛手的不確定性,采用多線性插值、最壞情況效用融合、交替最大化等啟發式原理,為無人機交通管理提供了一種魯棒高效的多機沖突解脫方法。2018年,韓國世宗大學(Sejong University)[113]提出了一種基于幾何約束與動力學方程的多旋翼無人機動態環境防撞算法,該算法在進行避碰的同時還會利用目標位置逼近方法引導無人機飛往目標點。2020年,NASA[114]提出了基于設計安全間隔(Design Separation)的城市空中交通管理概念:在不同類型航空器混合飛行時(載人/載貨無人機與不同飛行規則的有人機),通過設計安全間隔的自適應調整,保障UAM自主運行安全。
2)地面風險
目前關于地面風險評估的研究較為成熟。早在2006—2007年,MIT的Weibel和John[115]與QUT 的Clothier等[60]分別建立了基于事件與基于條件概率的地面風險評估模型,該模型主要包括無人機系統故障率、致命碎片覆蓋面積、區域人口密度、碎片穿透系數(或環境遮蔽系數)和墜落緩解措施等參數,搭建了無人機地面風險評估一般框架。2017年,RMIT[116]對33種不同的地面風險模型進行了全面綜述,將這些模型分解為失效模型(Failure)、撞擊模型(Impact Location)、恢復模型(Recovery)、壓力模型(Stress)、暴露模型(Exposure)、事故壓力模型(Incident Stress)和傷害模型(Harm)這7個子模型,從不確定性等級、模型特征與模型假設等角度,對比分析了現有33種地面風險模型的優勢與不足。NASA等[117]提出了一個無人機運行風險實時評估框架,將無人機系統監控數據與動態環境信息相結合,通過基于貝葉斯網絡的概率圖模型和無人機地面撞擊模型,實現了無人機運行風險的實時評估。丹麥奧爾堡大學(Aalborg University)的la Cour-Harbo[118]通過計算無人機拋體運動微分方程的近似解析解來建立無人機墜機彈道下降情況下的數學模型,為無人機墜落地點預測提供了一種理論計算可能。2019年,意大利都靈理工大學(POLITO)的Primatesta等[119]在已有研究基礎上,利用開放地圖(OpenStreetMap)獲取地理信息數據,提出了一種面向城市環境的無人機運行風險地圖繪制方法,初步搭建了無人機運行風險可視化框架。la Cour-Harbo[120]在前期研究[118-119]基礎上,針對小型無人機系統超視距飛行,建立基于飛機尺寸、風力風向、參數不確定性的高保真度墜落地點分布模型,以丹麥空域為例,針對單架無人機飛行任務與飛行航跡,進行了實際地面風險分析,以此來衡量小型無人機超視距飛行的可行性。在上述模型中,大多只考慮了無人機系統失效而產生的地面風險,沒有將空中碰撞納入到地面風險的事故致因中。于是,韓國航空宇宙研究院的Kim[121]基于無人機碰撞模型對空中碰撞導致的地面風險評估作出了初步嘗試,北京航空航天大學的全權等[56]綜合考慮了系統失效、空中碰撞以及其他導致無人機墜機的因素,搭建了無人機地面風險通用模型。此外,為了控制由于各種原因而產生的地面風險,NASA[122]針對傳統風險緩解措施(避開人口密集區)的局限性,提出了一個基于實時感知與自主飛行控制的風險緩解框架,通過識別與利用臨時安全走廊,使無人機能夠進入人口密集區運行。后來,NASA等[123]又針對UAM安全設計提出了危險分析技術,通過功能危險性分析(Functional Hazard Assessment, FHA)與系統理論過程分析(Systems Theoretic Process Analysis, STPA)相結合的方式,評估分析UAM運行的風險環節并有針對性地進行風險緩解,從而為eVTOL適航認證與監管審批提供技術支持。
4.3.3 應急管理
為了更好地提供城市空中交通服務,必須考慮UAM應急管理措施,以保證UAM在發生事故、自然災害等一系列特殊情況時依然能夠平穩有效運行,不至于系統癱瘓,從而形成從空域資源規劃到流量調度控制再到運營服務保障的UAM運行管理體系,因此,本文將應急管理作為單獨一部分,總結梳理關于UAM應急管理方面的研究。
2004年,美國的Ge等[124]利用MATLAB中SIMULINK模塊開發了一個無人機自動應急管理仿真實驗工具,將無人機動力學與控制模型、綜合預測與自適應智能控制方法集成到實驗環境中,可用于開發、測試和驗證各種自動化平臺。2009年,西班牙的Pastor等[125]提出了一種結構化方法來進行UAS應急響應實驗。考慮到突發事件可能與飛行、任務、有效載荷與感知系統4個方面有關,該方法將突發事件來源進行分類,并通過更新飛行包線來抽象描述突發事件對于UAS的影響。根據突發事件嚴重程度,應急響應范圍可能從改變或取消任務目標到取消飛行活動本身。2014年,圣何塞州立大學(San Jose State University, SJSU)與NASA[126]設計了一項模擬實驗,用于檢驗目前UAS應急程序對于空中交通安全、效率以及管制員工作量的影響。研究發現,UAS突發事件對于當前空中交通沒有顯著影響,并且根據受訪者建議,未來UAS標準化應急程序應當盡可能地減少航向與高度變化。2017年,西班牙的Usach等[127]提出了一種將自動應急管理集成到UAS的方法,以結構化和偽形式化的方式表達了應急程序的高質量需求,該方法能夠提高應急程序的適用性、一致性、完整性和正確性。2019年,NASA的Baculi等[128]針對UTM的TCL4,提出了一個sUAS機載決策架構,用于實現自主飛行控制系統的安全飛行。sUAS決策器通過監控各項指標,以確定飛行任務的安全性與可行性,并在有限狀態機中將飛行狀態分為標稱、非標稱、變更著陸與立即著陸4個部分。NASA通過導航降級與通信故障仿真實驗,驗證了該決策框架在應急飛行中適時切換飛行狀態的可行性。2020年,NASA、FAA、工業界與學術界[129]聯合制定了通信導航非標稱情況(比如指揮控制通信中斷與導航降級)的九項管理要求,由于在2019年UTM的TCL4飛行論證過程中[130],通信導航非標稱情況的一些要求無法被滿足,于是,NASA[129]提出了通信導航自動應急管理建議,包括標準化通訊導航非標稱情況的監測方法以及整合UAS與UAS服務提供商的非標稱情況緩解流程。
4.4 基礎設施
城市空中交通的有效運行離不開地面基礎設施的全面支持。未來城市空中交通應當是空地協同式的交通運輸模式,航路網絡規劃必須考慮地面垂直起降機場布局,UAM運行也必須保持在通信、導航、監視(CNS)的有效范圍之內。因此,本節將主要從垂直起降機場與通信導航監視2個方面綜述當前關于城市空中交通基礎設施方面的研究。
4.4.1 垂直起降機場
目前關于垂直起降機場的研究主要以機場概念設計、機場布局選址、機場容量評估與機場網絡分析等為主。2017年,卡塔爾大學(Qatar University)[131]在考慮任務時間約束與電池電量約束的條件下,建立了無人機停靠充電站選址覆蓋模型,提出了懲罰加權K-means聚類算法與粒子群優化算法以實現模型快速求解。2018年,慕尼黑工業大學(Technical University of Munich, TUM)的Fadhil[132]基于地理信息系統(GIS),對UAM垂直起降機場布局進行了研究。結合供需標準,采用加權線性組合與層次分析法分析評估了UAM垂直起降機場的最佳布局地點,并針對洛杉磯和慕尼黑地區,提出了多種UAM地面基礎設施設計方案。此外,根據停機位、航站樓與起降場面布局的不同,Fadhil還提出了垂直起降機場的三種設計概念:垂直起降站(Vertistop)、垂直起降場(Vertiport)、垂直起降中心(Vertihub)。GT的Daskilewicz等[133]主要以舊金山與洛杉磯為例,基于人口普查數據,計算UAM出行需求與通勤時間,并以相較于汽車通勤時間的減少量最大化為目標函數,利用整數線性規劃進行模型求解,最終得到了舊金山與洛杉磯垂直起降機場的最佳分布位置與eVTOL通勤潛在出行次數。NASA的Kohlman等[134-135]建立了一個系統級UAM機場網絡模型,該模型可用于估計:滿足需求所需航空器數量、給定時間空中交通量以及航空器著陸徘徊所需等待時間等參數。此外,Kohlman等[134-136]還對UAM航空器的能源動力系統做出了初步研究與探索,結果表明混合動力航空器相較于純電力航空器在運行成本、系統重量等方面具有更大的優勢。2019年,MIT的Vascik和John[137]提出了4種拓撲類型的垂直起降機場設計概念,并利用整數規劃方法研究不同運營參數下垂直起降機場的運力與容量。GT的Yilmaz等[138]從能量消耗和著陸精度兩方面探討了在大氣湍流條件下eVTOL航空器的垂直進近運行,通過構建動力學仿真環境,建立eVTOL自動飛行控制模型來估計著陸精度,研究結果表明,在不同進近剖面和天氣條件下,eVTOL著陸精度誤差呈橢圓型概率分布。美國航空航天系統設計實驗室(Aerospace Systems Design Laboratory)[14,15]考慮VTOL航空器目前存在噪音過大、效率低下等問題,提出了更容易投入運營的STOL航空器起降機場選址方法,并分析了氣象(尤其是風)與障礙物對機場布局選址的影響。
4.4.2 通信導航監視
通信導航監視能力是UAM有效運行的重要支撐,目前NASA格倫研究中心正在研究先進通用、可靠安全且經濟實惠的CNS系統,以適用于任何環境下的UAS運行。
2016年,Uber在描繪未來城市空中交通系統時[2],提出要開發未來空中導航系統(Future Air Navigation Systems, FANS),如管制員與飛行員的數據鏈路通信(Controller Pilot Data Link Communications, CPDLC)等,以對傳統語音通信方式進行補充完善。Uber擬建立內部通信網絡,將結合ADS-B、手機與近地軌道衛星網絡以及低功率地面微波數據鏈路,以實現精確導航與實時通信。NASA[139]將國際民航組織(International Civil Aviation Organization, ICAO)所需導航性能(Required Navigation Performance, RNP)的概念拓展至sUAS中,將RNP不同級別的需求定義為關于sUAS運行風險的函數。通過系統總誤差(Total System Error, TSE)計算,能夠得出sUAS的RNP等級水平。2017年,NASA與波音公司[140]針對管制與非管制空域運行環境,為所有類型UAS的CNS體系架構提供了設計指南。緊接著,2018年,NASA與波音公司在設計指南基礎上,為管制空域運行的大型UAS,設計了可靠安全的CNS體系架構[141],并提出了關于UAS CNS的九個技術成熟等級(Technology Readiness Level, TRL)[142],針對UAS的通信網絡、數據鏈路、系統導航、監視技術等方面,分析了各個技術當前的TRL水平以及未來發展部署方式。與此同時,NASA[143]還探討了關于UTM命令與控制(Command and Control, C2)通信技術的可靠性、可用性、可拓展性以及其他性能要求,并提出基于商用蜂窩網絡的UTM C2鏈路評估和分析方法。2019年,NASA與波音公司[144]針對ICAO與美國航空無線電技術委員會(Radio Technical Commission for Aeronautics, RTCA)在研究UAS通信網絡與航空數據鏈路過程中存在的CNS方案重疊問題,提出了適用于ICAO與RTCA的通用UAS CNS體系結構概念,以確保全球航空具備一致且安全的CNS框架。NASA與路易斯維爾大學(University of Louisville, U of L)[145]論述了在基于蜂窩的sUAS通信中使用多輸入與多輸出(Multiple-input and Multiple-output, MIMO)技術的好處,并提出了適合NASA sUAS運行的兩種MIMO配置方式(比如天線的類型、大小和數量等)。
除了NASA等機構的研究之外,RMIT的Bijjahalli等[146]以城市環境中UAS的失效模式作為研究對象,對UAS運行的GNSS性能進行了綜合分析。在此基礎上,提出了考慮城市結構的GNSS導航策略。研究結果表明,與傳統最小距離導航策略相比,該方法的精度(約25%)與有效性得到了明顯提高。RMIT的Syd[147]考慮到當前UAS飛行主要依托于地面飛手,認為UTM通信模式應當主要為地對地通信,并且提出了建立冗余且高性能的監視系統是UTM的關鍵所在,UTM監視網絡應當為分層網絡,包括ADS-B與4G等蜂窩技術,用以彌補不同網絡之間的差距。2020年,億航智能[11]提出建設衛星導航地基增強系統以增強GNSS定位功能來應對城市復雜環境,實現UAM精準導航,并配備視覺導航系統以處理GNSS無法覆蓋的情況,確保UAM航空器安全,未來將引入5G通信技術以促進UAM系統的智能化發展。
5 總結與展望
城市空中交通是解決城市交通擁堵問題最有力的方式之一,未來必將在社會各界的共同努力下迎來繁榮興盛的局面。目前城市空中交通的發展在世界各國均處于起步階段,城市空中交通管理作為無人機交通管理(UTM)與傳統空中交通管理(ATM)的交叉領域,遠未形成一個統一且完善的框架體系。本文嘗試從無人駕駛航空器系統、城市空中交通系統與傳統空中交通系統相互融合的角度,提出城市空中交通發展的4個階段,并以此設計了城市空中交通管理的運行概念,構建了城市空中交通管理體系結構框架,明確城市空中交通管理的主要內容,梳理總結了城市空中交通管理的主要研究進展(文獻見表1),為未來城市空中交通管理發展奠定一定基礎。
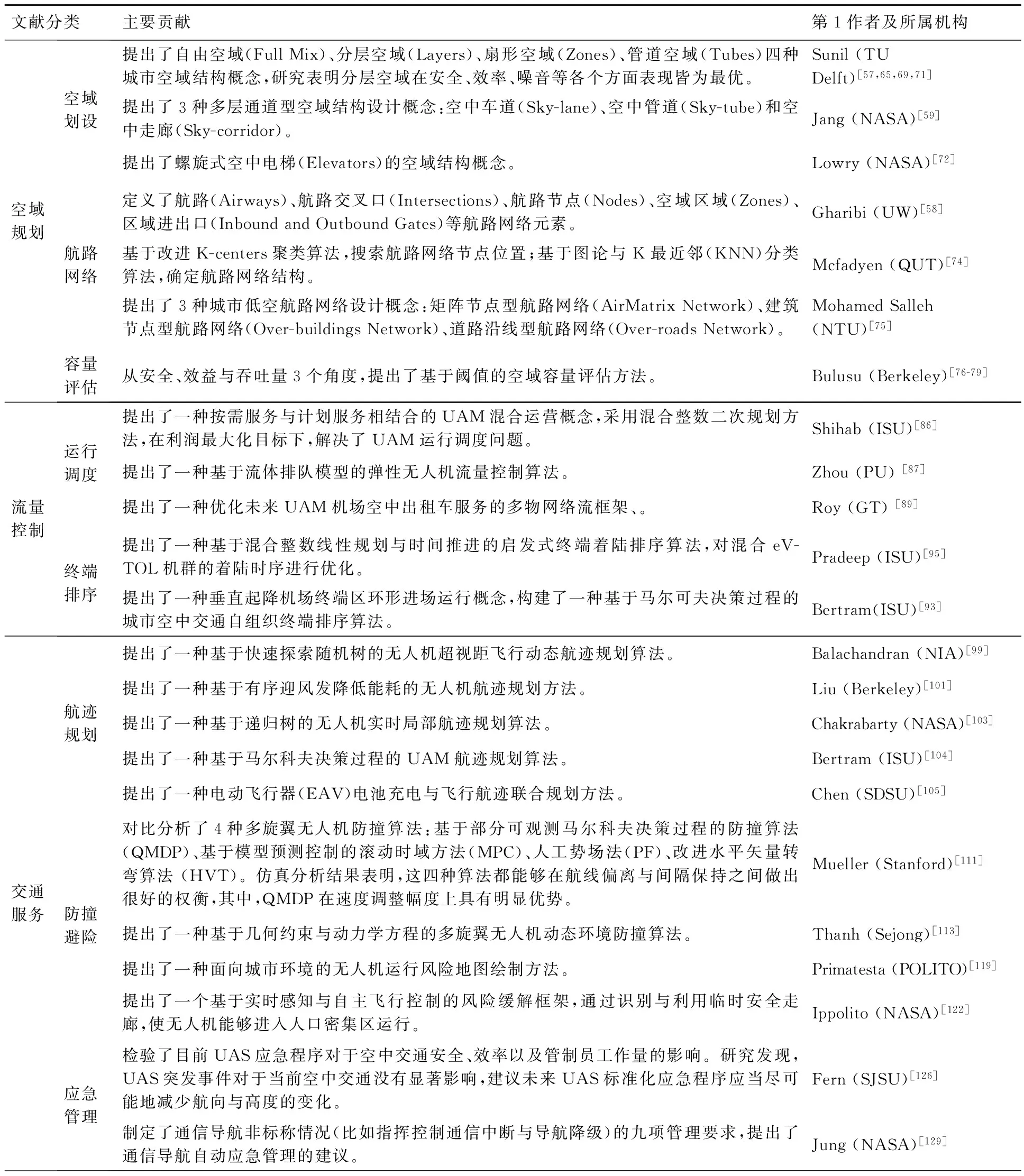
表1 文獻總結
然而,城市空中交通作為一種前所未有的新興交通模式,其管理亦必面臨諸多重要挑戰:
1)城市空中交通環境隨機復雜多變。復雜多變的城市空間,不同于一般的低空空域和傳統的高空空域,樓宇密布、人口密集、惡劣天氣、飛鳥干擾等動靜態、不確定因素隨機影響,城市空中交通管理必須考慮各種復雜環境的影響及其帶來的公共安全、噪音污染、隱私保護等現實問題。
2)城市空中交通載運工具方興未艾。未來城市空中交通載運工具將以短距起降、垂直起降的航空器為主,包括無人駕駛航空器,盡管這種航空器研制生產已取得較大進展,但其適航性能、人機模式等仍待深入驗證,規模化應用檢驗較為困難。
3)城市空中交通規劃精細化要求高。如何合理開發有限的城市空中資源,滿足高密度的城市空中交通需求,是城市空中交通管理的重要基礎。城市空中交通規劃既要考慮其體系內部低空空域分類劃設、航路網絡精細設計、起降設施科學布局,也要考慮如何與城市空間設施、道路交通系統等無縫銜接,以確保城市空中交通載運工具精確起降和精準飛行。
4)城市空中交通管控模式尚不明確。雖然本文提出了一種城市空中交通管理體系結構框架、各部分基本定位和協同關系,但其受低空空域管理改革、城市管理等多因素的制約,城市交通局、公安局及其與低空飛行服務保障體系等多部門協同機制仍不明確,城市空管與交通用戶之間相互關系尚不清楚,職責差異化、管控協同化、空地一體化的城市空中交通管控模式需深入研究。
5)城市空中交通法律法規標準空白。城市空中交通作為一種新型交通模式,相關法律、法規、規范、標準等幾乎空白,亟需通過先行先試的方式探索構建一整套城市空中交通法律法規,通過理論研究與實驗驗證相結合的方式建立一系列標準規范,比如各類航空器最小安全間隔標準和垂直起降機場最大運行容量規范等。
面向未來城市空中交通發展的需求、問題和挑戰,建議從理論研究、系統建設、試點應用等方面全面開展城市空中交通管理研究:
1)加強理論研究。重點研究城市空中交通特性、空域精細規劃、流量智能控制、垂直起降航空器沖突智能感知與自主避險等相關基礎理論與關鍵技術,探索建立城市空中交通運行規則、法律法規、行業標準、管理機制等,逐步形成一套科學嚴謹、完整自洽的城市空中交通管理理論、方法和技術體系。
2)加快系統研制。融合應用北斗、5G、物聯網、大數據、人工智能等新技術手段,開展垂直起降機場、站點及通信、導航、監視等基礎設施布局規劃建設,構建多方協同、空地一體、互聯互通的城市空中交通信息網絡,研制城市空中交通管理系統及其配套設施設備。
3)開展示范應用。選擇空域條件良好、人口密度不大的中小城市或新城區,開展城市空中交通示范性應用試驗,驗證研究成果和系統效果。走“小城包圍大城”的發展之路,由點及面,先行先試,逐步推廣,最終建成一個安全、高效、綠色、可持續發展的城市空中交通管理體系,加快推動城市空中交通成為現實。