破拆機器人自動快換裝置設(shè)計及容差分析*
2021-07-30 06:58:34段亮亮鄒樹梁
機械工程與自動化 2021年2期
關(guān)鍵詞:機械
段亮亮,鄒樹梁,鄧 騫
(1. 南華大學(xué) 機械工程學(xué)院,湖南 衡陽 421001;2.核設(shè)施應(yīng)急安全作業(yè)技術(shù)與裝備 湖南省重點實驗室,湖南 衡陽 421001)
0 引言
破拆機器人通常在危險復(fù)雜環(huán)境中作業(yè),需要完成挖掘、切割和破碎等一系列作業(yè)任務(wù),且任務(wù)目標(biāo)的尺寸、重量和形狀又各不相同[1]。因此使用單一的末端工具很難完成多樣性的作業(yè)任務(wù),較好的解決方案是為破拆機器人配備末端工具自動快換裝置和末端工具庫,使其可以在作業(yè)過程中根據(jù)實際需要選擇更換最合適的末端工具,提高破拆機器人的作業(yè)能力和作業(yè)效率[2,3]。
國內(nèi)外對快換裝置都進行了一定的研究。美國ATI公司設(shè)計了一種鋼珠球鎖緊的快換裝置,利用氣動的方式推動滾珠完成快換裝置的鎖緊與斷開,具有較高的重復(fù)精度[4];RAD公司研制的一種更換裝置,通過裝在主端口的氣動活塞向下推動鋼珠進入工具端口的鎖緊環(huán)中,鋼珠卡在鎖緊環(huán)中使手腕與手爪端口緊密結(jié)合[5]。瑞典的Brokk公司設(shè)計了一種插銷式的快換裝置,依靠機械臂末關(guān)節(jié)的轉(zhuǎn)動和液壓缸推動插銷來進行鎖緊,在換接過程中對定位要求很高且對接軌跡較為復(fù)雜[6]。
針對上述快換裝置的問題,本文設(shè)計了一種針對遙操作破拆機器人的自動快換裝置,其結(jié)構(gòu)緊湊,換接過程快捷、簡便、可靠性好。該裝置對接時不僅可以實現(xiàn)機械臂和末端工具的機械連接與斷開,而且可自動實現(xiàn)兩者的液壓或電氣連接和斷開,能承受較大的載荷,并具有一定的位姿容差能力[7]。
1 自動快換裝置總體方案
1.1工作原理
如圖1所示,該自動快換裝置由兩部分組成[8-10],分別為主側(cè)和工具側(cè),主側(cè)和工具側(cè)是一對多的關(guān)系,主側(cè)可以與多個工具側(cè)進行換接,從而使遙操作破拆機器人可以在工作過程中根據(jù)實際工作任務(wù)更換合適的末端工具。自動快換裝置的主側(cè)安裝在機械臂上,工具側(cè)安裝在各個末端工具上,末端工具有鏟斗、液壓剪、破碎錘等。
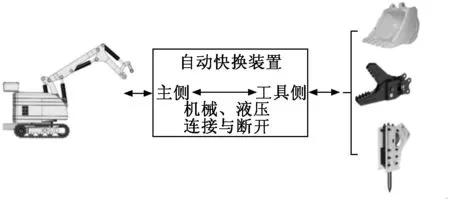
圖1 自動快換裝置工作原理
1.2 技術(shù)要求
本文設(shè)計的自動快換裝置應(yīng)用于遙操作破拆機器人,使其進入一次工作環(huán)境可以完成多種作業(yè),提高了破拆機器人的適應(yīng)性和工作柔性,降低了作業(yè)成本[11]。基于上述自動快換裝置的工作原理,對設(shè)計的自動快換裝置提出如下技術(shù)要求[12]:
(1) 通用性好,自動快換裝置適用于多種破拆機器人機械臂結(jié)構(gòu),應(yīng)用范圍廣泛。
(2) 換接過程簡便、快捷,提高工作效率。
(3) 具有一定的位姿容差能力,機械臂與末端工具對接時存在一定的位姿誤差時仍能成功對接。
(4) 機械連接可靠,保證工作狀態(tài)下機械臂與末端工具保持連接狀態(tài),防止出現(xiàn)工具脫落的危險。
(5) 換接時可自動實現(xiàn)液壓或電氣的連接和斷開,滿足拆除機器人在工作時需要向末端工具傳遞液壓或電氣信號的要求。
2 自動快換裝置機械設(shè)計方案
2.1自動快換裝置機械結(jié)構(gòu)
根據(jù)自動快換裝置的工作原理設(shè)計其機械結(jié)構(gòu),如圖2所示。

1-支撐板;2-托架;3-公接頭安裝板;4-端蓋;5-母接頭安裝板;6-螺桿;7-轉(zhuǎn)盤;8-鎖緊銷;9-連桿;10-液壓母接頭;11-液壓公接頭;12-工具側(cè)主體;13-校姿滑塊;14-校姿滑道;15-電機支架;16-步進電機;17-主側(cè)主體;18-連接架;19-銷軸
主側(cè)主體上設(shè)計有用于換接的校姿滑塊,工具側(cè)主體上設(shè)計有校姿滑道和限位孔。自動快換裝置帶剎車步進電機、轉(zhuǎn)盤、連桿和鎖緊銷共同組成鎖緊機構(gòu),步進電機與破拆機器人上的電源相接,鎖緊機構(gòu)的運動由步進電機提供動力,步進電機只有在更換末端工具時才會轉(zhuǎn)動,并且自動快換裝置在鎖緊的工作狀態(tài)下,步進電機本身的保持力矩會提供一定的預(yù)緊力,保證自動快換裝置一直處于鎖緊狀態(tài),防止由于工具側(cè)脫落引發(fā)的危險。
自動快換裝置除了為破拆機器人機械臂和末端工具提供機械連接外,另一個作用是為末端工具提供動力。故本文中設(shè)計的母接頭安裝板和公接頭安裝板分別可以裝6個液壓接頭,最多為末端工具提供3條油路。
2.2 換接過程
當(dāng)破拆機器人需要更換末端工具時,換接過程如圖3所示。破拆機器人驅(qū)動機械臂調(diào)整其末端的自動快換裝置主側(cè)的位姿,使自動快換裝置主側(cè)兩邊的校姿滑塊與工具側(cè)左右兩邊的校姿滑道相對齊,如圖3(a)所示;然后驅(qū)動機械臂使自動快換裝置主側(cè)上的校姿滑塊沿工具側(cè)上的校姿滑道向下滑動,直至校姿滑塊底面與滑道底面相接觸,此時端蓋底面和液壓公接頭安裝板頂面相接觸,促使液壓、電氣母接頭與液壓、電氣公接頭完成對接,主側(cè)上的鎖緊銷與工具側(cè)主體上部的限位孔對齊,如圖3(b)所示;然后驅(qū)動步進電機通過轉(zhuǎn)盤與連桿使鎖緊銷向兩邊同時伸出,鎖緊銷穿過工具側(cè)主體上部兩側(cè)的限位孔到達指定位置后,步進電機停止工作,完成主側(cè)與工具側(cè)的機械鎖緊,如圖3(c)所示;然后接通液壓油路或電路,自動快換裝置完成對接,安裝結(jié)束,如圖3(d)所示。
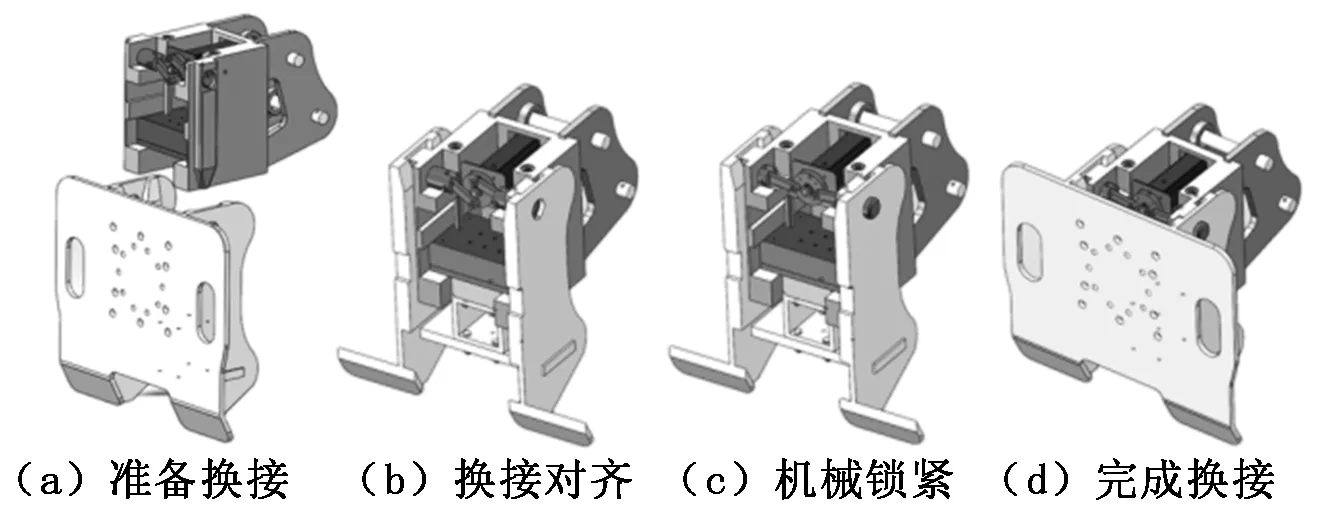
圖3 換接過程
自動快換裝置工作狀態(tài)如圖4所示。
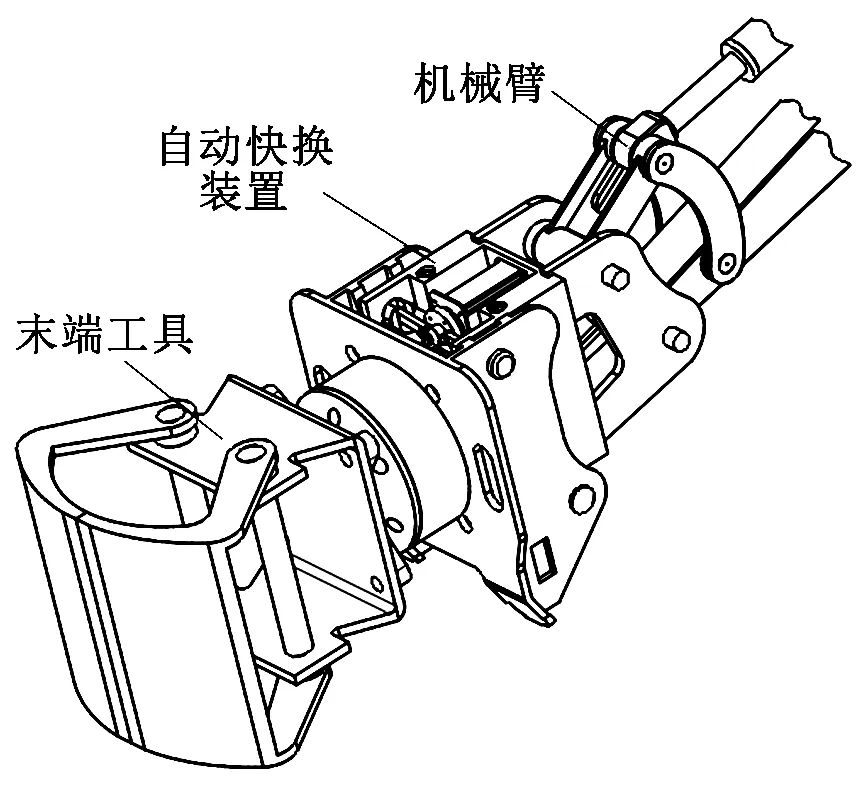
圖4 自動快換裝置工作狀態(tài)
3 位姿容差能力分析
破拆機器人在進行末端工具的安裝時,首先需要驅(qū)動機械臂調(diào)整自動快換裝置主側(cè)的位姿,盡可能使主側(cè)兩邊的校姿滑塊與工具側(cè)兩邊的校姿滑道對齊,然后驅(qū)動機械臂帶動主側(cè)校姿滑塊沿校姿滑道向下運動,與工具側(cè)進行換接。但由于機械臂調(diào)整自動快換裝置主側(cè)滑塊在向下運動的過程中,與工具側(cè)之間總會出現(xiàn)一定程度的位姿誤差,因此為了降低自動快換裝置主側(cè)和工具側(cè)的對接難度,提高對接效率,自動快換裝置在對接時應(yīng)具有一定的位姿容差能力。
為了驗證自動快換裝置的位姿容差能力,對其進行誤差補償分析。主側(cè)和工具側(cè)對接時的情況如圖5所示,建立坐標(biāo)系O-xyz、O′-x′y′z′分別與自動快換裝置主側(cè)、工具側(cè)固連,當(dāng)對接完成后,坐標(biāo)系O-xyz與坐標(biāo)系O′-x′y′z′完全重合。依靠導(dǎo)向錐面具有的導(dǎo)向作用,當(dāng)主側(cè)Oxy平面的邊界曲線沿O′z′軸負方向在O′x′y′平面上的投影位于工具側(cè)A平面的邊界曲線內(nèi),就可以認為自動快換裝置的主側(cè)和工具側(cè)能夠順利對接換裝。
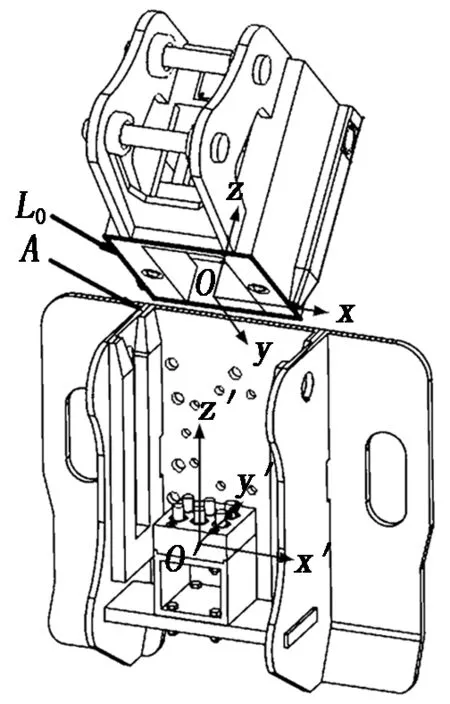
圖5 主側(cè)和工具側(cè)對接時的情況


(1)
其中:px、py、pz為坐標(biāo)系O-xyz的原點O在世界坐標(biāo)系O′-x′y′z′中的坐標(biāo);坐標(biāo)系O-xyz的姿態(tài)是由世界坐標(biāo)系O′-x′y′z′繞O′x′軸旋轉(zhuǎn)γ角,繞O′y′軸旋轉(zhuǎn)β角,繞O′z′軸旋轉(zhuǎn)α角形成的。
在坐標(biāo)系O-xyz中,自動快換裝置主側(cè)Oxy平面上的邊界曲線LO是由直線L1、L2、L3和L4組成的封閉圖形,直線方程為:
(2)
設(shè)在坐標(biāo)系O-xyz中,自動快換裝置主側(cè)Oxy平面上由直線組成的邊界曲線的交點可以表示為:
Mi=(xi,yi,zi)i=1,2,…,12.
(3)
則其在世界坐標(biāo)系O′-x′y′z′中表示為:
(4)
則在世界坐標(biāo)系O′-x′y′z′中,該邊界曲線LO′的方程為:

(5)
轉(zhuǎn)變?yōu)辄c向式為:
(6)
其中:A1、A2、B1、B2、C1、C2、D1、D2為根據(jù)交點坐標(biāo)求出的常量。
在世界坐標(biāo)系O-x′y′z′中,A平面的方程為:
z-305=0.
(7)
則過邊界線LO′的平面束方程為:
(A1+λA2)x′+(B1+λB2)y′+
(C1+λC2)z′+(D1+λD2)=0.
(8)
其中:λ為常量。根據(jù)A平面與過邊界線LO′的平面束垂直,則兩平面的法向量相乘等于0,可求出λ的值。將λ代入公式(8),可得在世界坐標(biāo)系O′-x′y′z′中邊界曲線LO′在A平面上的投影方程LOA′為:
(9)
在世界坐標(biāo)系O′-x′y′z′中,A平面的邊界曲線LA的方程為:
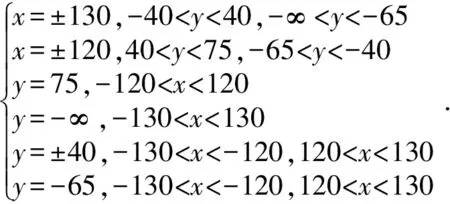
(10)
若世界坐標(biāo)系O′-x′y′z′中,投影方程LOA′在A平面邊界曲線LA范圍之內(nèi),就表明主側(cè)和工具側(cè)成功對接。
4 仿真實驗分析
為了驗證結(jié)構(gòu)的合理性和理論分析的準(zhǔn)確性,利用MATLAB和ADAMS軟件對自動快換裝置進行仿真分析。自動快換裝置典型的位姿誤差如表1所示。

表1 自動快換裝置典型位姿誤差
將表1中的位姿誤差數(shù)據(jù)代入到位姿誤差條件中,在MATLAB中繪出曲線LOA′和A平面的邊界曲線LA的函數(shù)圖像,結(jié)果如圖6所示。如果曲線LOA′函數(shù)圖像在邊界曲線LA以內(nèi),則說明符合位姿容差條件。
根據(jù)上文的設(shè)計方案,在動力學(xué)仿真軟件ADAMS中模擬自動快換裝置主側(cè)和工具側(cè)的換裝過程,以驗證設(shè)計的合理性。將主側(cè)主體、校姿滑塊以及工具側(cè)底板和側(cè)板、校姿滑道導(dǎo)入ADAMS中,建立虛擬實驗平臺。
根據(jù)表1中不同的位姿誤差數(shù)據(jù),在ADAMS軟件中調(diào)整自動快換裝置主側(cè)的位姿,進行模擬仿真。仿真時長為10 s,仿真步數(shù)設(shè)置為50步,得到的第1組數(shù)據(jù)的仿真實驗結(jié)果如圖7所示。
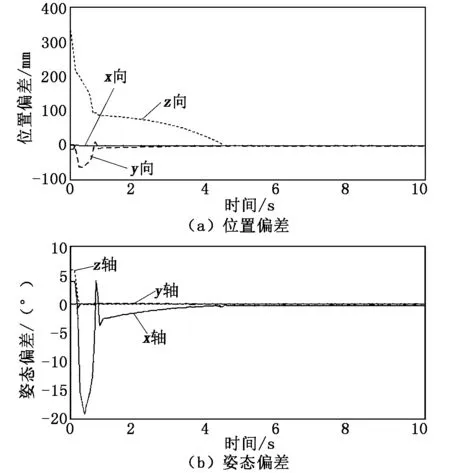
圖7 第1組仿真實驗結(jié)果
第1組數(shù)據(jù)仿真實驗結(jié)果顯示出自動快換裝置主側(cè)和工具側(cè)沿x、y、z軸的位置誤差和繞x、y、z軸的姿態(tài)誤差最后都將趨于零且保持穩(wěn)定,表明主側(cè)和工具側(cè)成功換接。其余5組仿真實驗結(jié)果與第1組類似,表明主側(cè)和工具側(cè)成功換接。
根據(jù)圖6中的函數(shù)圖像可知,幾組數(shù)據(jù)都較為接近極限誤差情況,且函數(shù)圖像與仿真結(jié)果能夠相互印證,說明了位姿誤差條件的合理性,且較為客觀地反映了自動快換裝置的位姿容差能力。結(jié)合邊界曲線的函數(shù)圖像和仿真結(jié)果,可以知道自動快換裝置主側(cè)和工具側(cè)的位置誤差Px可以達到±5 mm、Py可以達到±10 mm,x、y、z軸姿態(tài)誤差為±4°。因此在自動快換裝置換接過程中應(yīng)優(yōu)先保證姿態(tài)誤差,再考慮位置誤差。
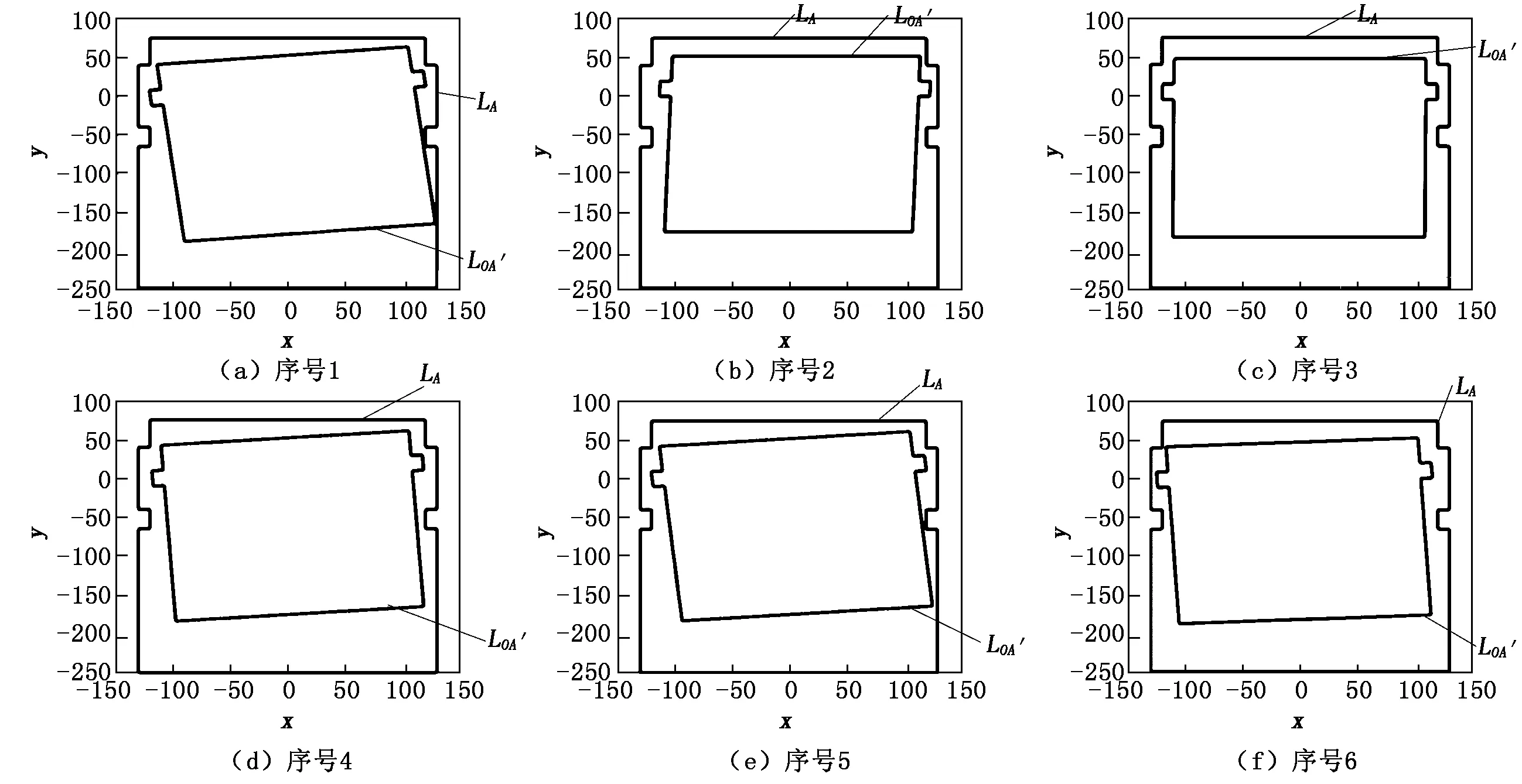
圖6 曲線和邊界曲線的函數(shù)圖像
5 結(jié)論
本文設(shè)計了一種可使破拆機器人根據(jù)實際工作需要更換末端工具的自動快換裝置,針對破拆機器人的需求,該裝置具有大載荷、換接過程簡單快捷、位姿容差、液壓和電氣連接、安全可靠等特點。闡述了其工作原理和機械結(jié)構(gòu),從理論上分析了該裝置的位姿容差能力,通過ADAMS對其換接過程進行了模擬仿真。通過理論分析和模擬仿真結(jié)果的對比,證明了該自動快換裝置能夠順利換接,證明了設(shè)計的可行性,為后續(xù)的研究提供了依據(jù)。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
