基于UWB與激光測距的綜采工作面定位系統
2021-07-30 09:26:42牛永剛竇學麗殷鵬李京生欒良良藍祥
工礦自動化 2021年7期
牛永剛, 竇學麗, 殷鵬, 李京生, 欒良良, 藍祥
(北京永安信通科技有限公司, 北京 100089)
0 引言
采煤作業是煤礦井下最重要、最危險的前端生產環節,對煤礦井下綜采工作面內的人員、采煤機等動目標的位置進行監控,可以有效保障工作面生產安全[1-2]。井下動目標定位一般采用基于無線通信的定位方法[3]。傳統的無線定位技術包括WiFi、射頻識別(RFID)、ZigBee等,這些技術由于自身局限性,無法實現綜采工作面的高精度定位[4-5]。超寬帶(Ultra Wide Band,UWB)技術具有抗多徑能力強、系統復雜性低等特點,可實現厘米級高精度定位,在礦井無線定位領域有很大優勢[6],滿足綜采工作面定位系統的精確度要求。
劉清[7]提出了一種基于UWB測距原理的采煤機定位系統,利用UWB的測距原理確定采煤機在工作面的相對位置,解決了復雜工況下采煤機定位精度低的問題。劉一鳴等[8]提出了一種基于UWB的采煤機定位精度提升算法,利用信息過濾算法對信號值進行過濾,利用神經網絡實現對采煤機的精確定位。但上述研究忽略了安裝在液壓支架上的基站位置變化對定位效果的影響。激光測距技術具有很好的單色性、方向性、相干性和高亮度的特點,可實現對物體相對距離的高精度測量[9],是校準基站位置較理想的選擇。綜采工作面環境惡劣,設備復雜,能見度低,人員與采煤機的相對位置是重要的安全監控內容,宜采用二維定位方法。本文將激光測距技術應用到礦山環境中,結合UWB定位技術,設計了基于UWB與激光測距的綜采工作面定位系統。該系統采用UWB通信來提高系統定位精度,利用激光測距技術自動校準定位基站位置。在山西潞安礦業(集團)有限責任公司高河煤礦E2308工作面對基站位置校準精度和系統定位精度進行了測試。測試結果表明,該系統具有較高的定位精度,有效解決了基站位置校準問題。
1 系統結構
基于UWB與激光測距的綜采工作面定位系統主要由定位基站、定位標志卡、交換機、地面數據中心組成,如圖1所示。定位基站安裝在液壓支架上,液壓支架位置變動,基站位置隨之變動,采用激光測距傳感器測量定位基站之間的距離。定位基站外接天線,發射固定功率的UWB無線信號,與佩戴在人員身上或安裝在設備上的定位標志卡通信,通過信號到達時間估計、到達時間差估計、到達角估計、飛行時間估計等定位方法來確定移動目標的位置信息[10-11]。定位基站接入礦井環網,通過礦井環網將位置信息數據上傳至地面數據中心。定位系統軟件將定位數據在地面監控中心進行可視化呈現,輔助管理決策。
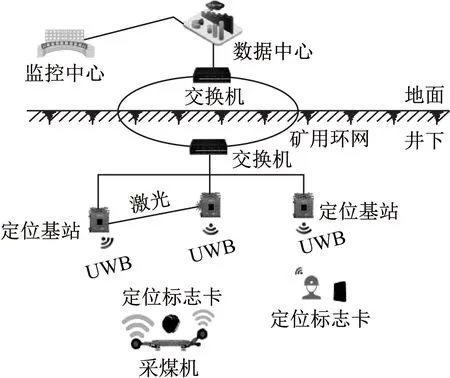
圖1 基于UWB與激光測距的綜采工作面定位系統結構
2 系統關鍵技術
2.1 UWB二維定位
采用DW1000 UWB 芯片[12]實現定位基站和定位標志卡之間的通信。通過UWB定位技術的飛行時間法來計算基站與標志卡之間的距離。定位基站安裝在液壓支架頂梁上,每個基站外接1個天線,基站天線采用全向平面天線,以垂直極化方式發射UWB電磁波信號。UWB電磁波信號的中心頻率為4.0 GHz。基站天線安裝位置有2種:靠近煤壁方向和遠離煤壁方向,如圖2所示。天線位置1和天線位置2的間距大于2 m,2種天線安裝位置交錯排列,使3個基站天線組成三角形(系統最少需要3個基站組成)。
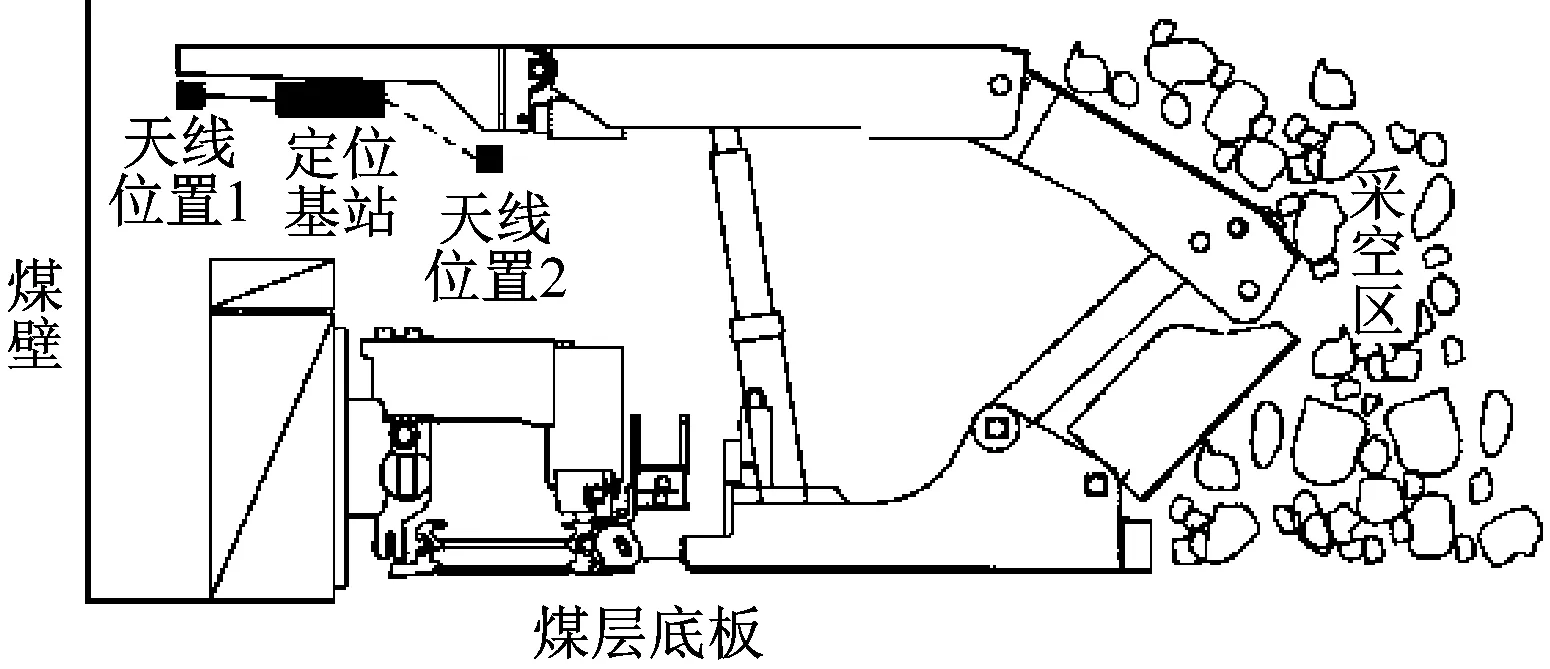
圖2 定位基站安裝位置
基于UWB與激光測距的綜采工作面定位系統定位原理如圖3所示。通過基站A,B,C對移動目標M進行定位。本文采用最大似然法進行定位解算[13-14]。假設基站A,B,C的位置坐標分別為(x1,y1), (x2,y2), (x3,y3), 移動目標M的坐標為(x,y),移動目標M到基站A,B,C之間的距離分別為d1,d2,d3,則可得
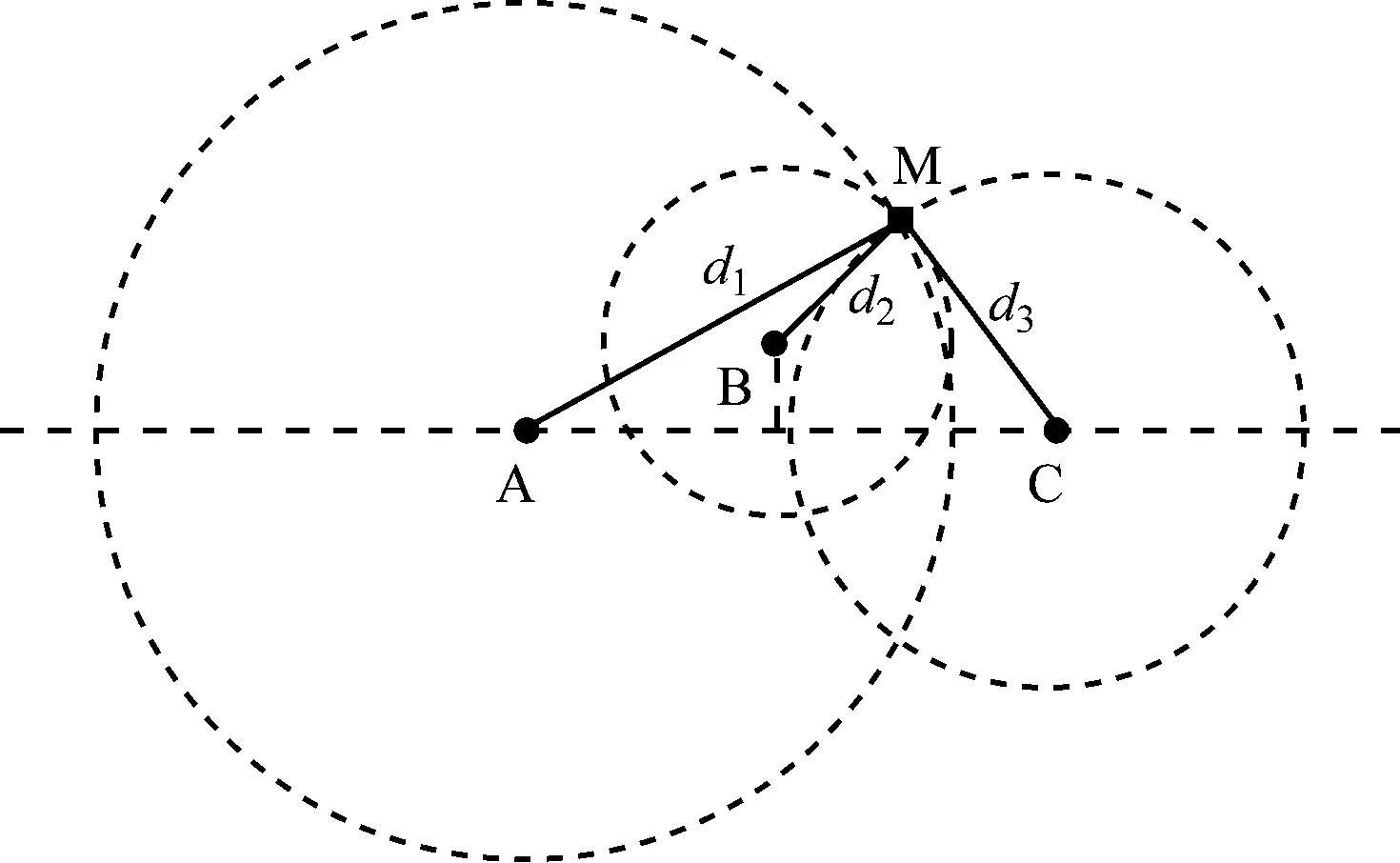
圖3 基于UWB與激光測距的綜采工作面定位系統定位原理
(1)
因式(1)為非線性方程組,不易求解,將其改寫成Dz=b的線性方程組的形式求解,其中D為系數矩陣,z為變量矩陣,b為常數矩陣,計算公式分別為
(2)
(3)
(4)
實際測量中,必須考慮測量誤差,假設測量誤差為e(z), 根據最小二乘原理得
(5)
對測量誤差e(z)求導,得到z的最小值:
(6)
假設方程有解,那么可得
z=(DTD)-1DTb
(7)
zT就是定位目標的位置坐標。
2.2 基站校準
采用GUJ1400礦用本安型激光測距傳感器測量定位基站之間的距離。定位基站通過CAN總線與液壓支架控制器連接,若基站所在液壓支架移架,則與之相鄰基站的激光測距傳感器校準此基站位置。基站連接方式如圖4所示。
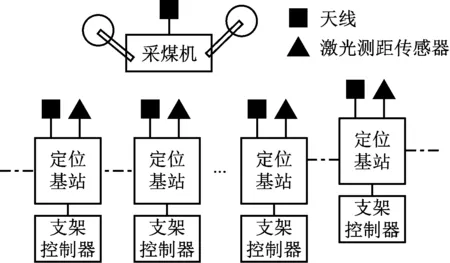
圖4 基站連接方式
基站位置校準方法如圖5所示。綜采工作面移架方式采用單架依次順序式,基站C所在的液壓支架向前推移(推移距離小于2 m),定位系統收到移架信號后30 s,與基站C相鄰的最近基站B的激光測距傳感器通過測距得到與基站C的距離k,基站B,C之間的水平距離l通過二者坐標值計算可得,根據勾股定理得到二者垂直距離j,從而進一步用基站B與基站A之間的垂直距離H減去j得到基站C的移動距離h。
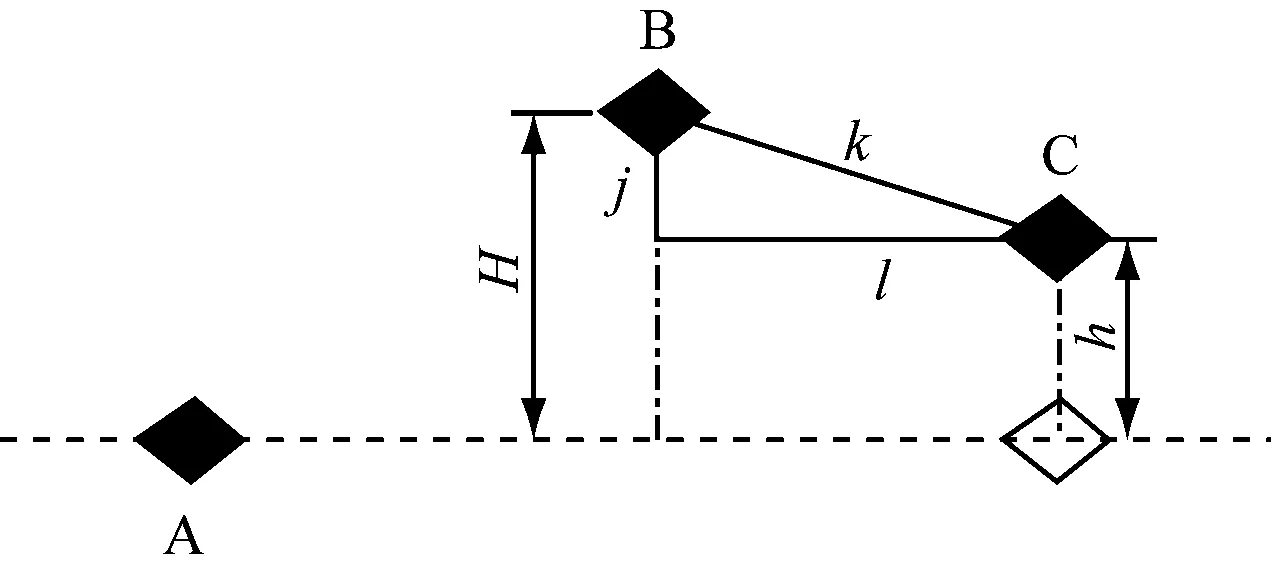
圖5 基站位置校準方法
3 系統測試
為驗證基于UWB與激光測距的綜采工作面定位系統的有效性,在高河煤礦E2308工作面進行基站位置校準精度和系統定位精度的測試。高河煤礦設計生產能力為600萬t/a,屬高瓦斯礦井,全井田布置一個開采水平(+450 m)。現采3號煤層,煤層標高為460~520 m,煤層厚度為6.2~7.5 m,平均厚度為6.38 m,屬穩定性煤層。E2308工作面采用長壁放頂煤開采技術,可采長度為653 m,切眼長度為335 m,采高為6.7 m,儲量為226萬t。工作面液壓支架各動作采用液壓片閥人工操作方式,采一刀煤,人工放一次煤。E2308工作面目前主要設備概況:① 采煤機型號為MG400/930-WD,采高為2.0~3.5 m,交流變頻無級調速。② 工作面中間液壓支架型號為ZF8500/22/42,端頭端尾液壓支架型號為ZFG10800/23/38。工作面架內(液壓支架立柱以內的空間)行人通道寬為0.6 m,架外(液壓支架立柱以外)到煤壁之間的寬度約為3.5 m。③ 前后部刮板輸送機型號為SGZ1000/2*1000,電動機功率為1 000 kW,運輸能力為2 000 t/h,電壓等級為3 300 V,采用變頻控制。
3.1 測試過程
測試工作使用的主要器材為礦用本質安全型定位基站和車輛定位標志卡及相應的固定支撐器材。測試工作在采煤機停運期間進行,共使用3個定位基站和10個車輛定位標志卡。測試過程如下:
(1) 在地面利用UWB定位系統管理軟件配置好測試用基站的IP地址和車輛標志卡卡號。
(2) 選定一段無地形起伏的工作面作為測試地點。將測試用基站與車輛標志卡接各自適配電源,并分別固定到相應支撐器材上,調整支撐器材水平。
(3) 將基站A, B, C安裝在液壓支架上,2個基站之間相距30 m,按照定位系統設計方案調整固定天線位置。利用CAN總線連接測試用基站與業務化運行的礦井定位系統在測試點處已存在的最近的定位基站,開啟測試用基站。
(4) 將車輛標志卡放置到指定位置,其中2個在液壓支架內,8個在液壓支架外。基站與標志卡位置如圖6所示。
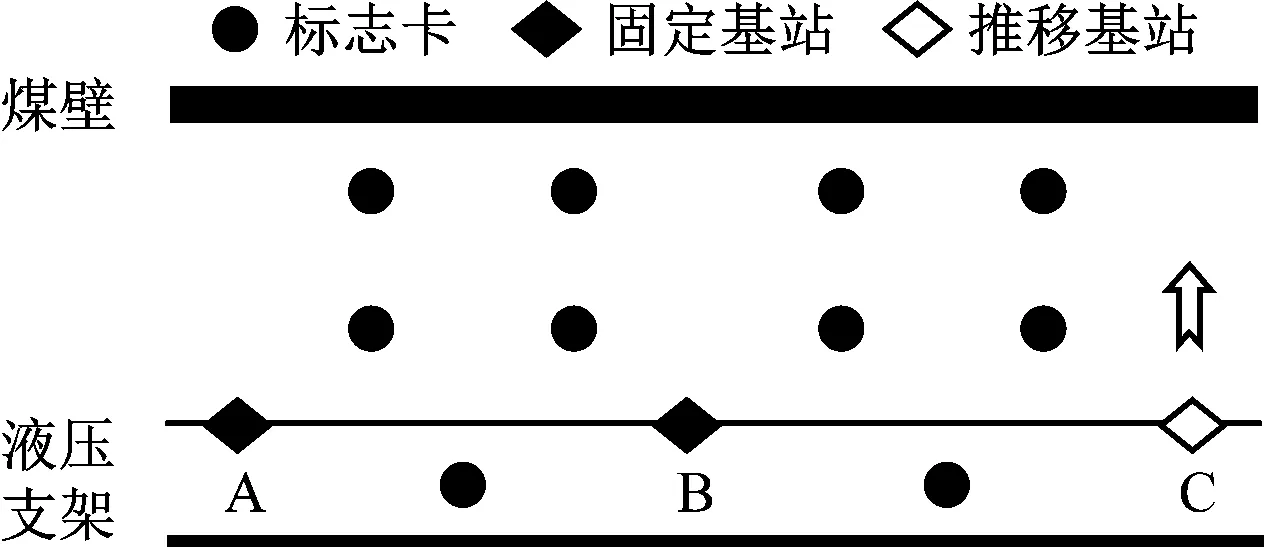
圖6 基站與標志卡位置
(5) 利用激光測距儀、纖維卷尺測量并且標定定位基站A,B,C和10個車輛標志卡的初始坐標位置。在之后的測試過程中,車輛標志卡、基站A和基站B保持位置不變。
(6) 在定位系統控制軟件中進行基站位置初始化設置,然后定位系統開始與車輛標志卡通信并進行定位。
(7) 測試過程中液壓支架位置不發生變動,而是通過改變基站位置來實現液壓支架移架的同等效果。將基站C向前移動,并手動發送移架信號給定位系統控制軟件。
(8) 系統對基站C的位置進行校準,然后對車輛標志卡進行定位。
(9) 重復步驟(7)和步驟(8)。
(10) 測試數據通過業務化運行的礦井定位系統上傳至地面服務器,測試完畢后從服務器下載數據到本地進行分析。
3.2 測試結果分析
3.2.1 基站位置校準精度分析
E2308工作面循環進度為0.8 m,采放比為1∶1.12;一刀一放,采放平行作業,放煤步距為0.75~0.8 m。基站C以0.2 m為單位間隔向煤壁方向推移,測量數據見表1。
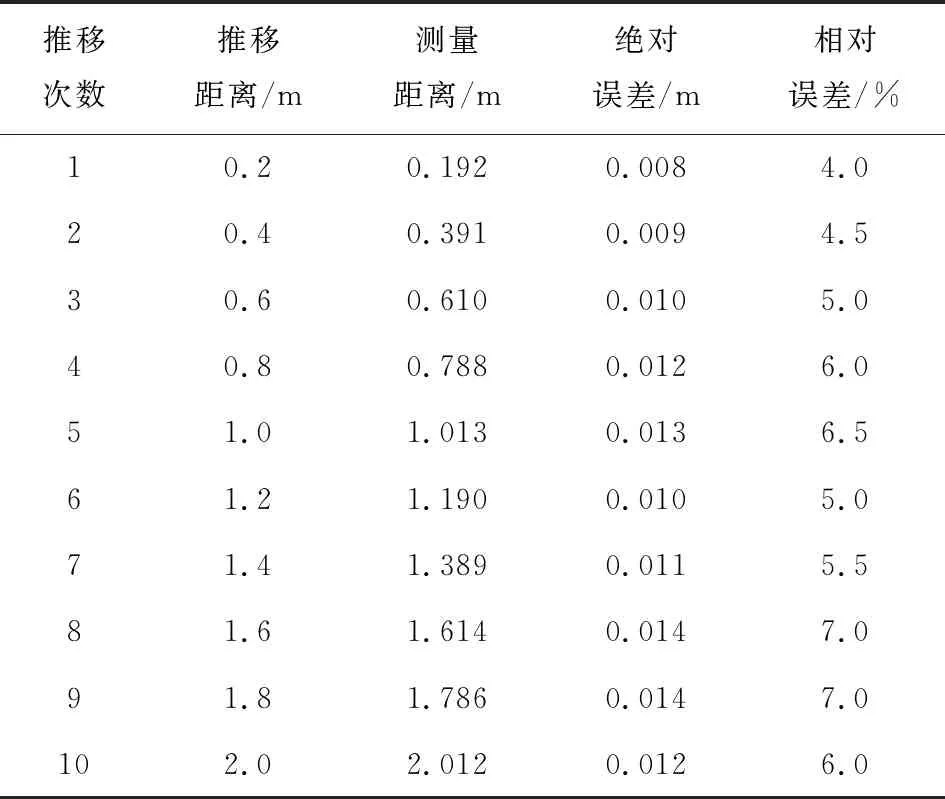
表1 基站位置校準測量數據
測量結果表明,激光校準基站位置的最小誤差為0.008 m,最大誤差為0.014 m,平均誤差為0.011 m,相對誤差較小,校準結果較為精確。
3.2.2 系統定位精度分析
選取初始狀態和液壓支架推移0.8 m時的狀態進行系統定位精度分析,以真實反映經過一次移架后的系統定位精度。
以基站A的天線位置為坐標原點,液壓支架延伸方向為X軸,指向煤壁的方向為Y軸,建立相對坐標系,基站B和基站C的天線位置初始坐標分別為(30 m,2.2 m)和(60 m,0)。記錄測量結果,并計算X軸和Y軸方向的誤差(Δxi=|xi-x0|,Δyi=|yi-y0|,i為標志卡序號,i=1,2,…,10),結果見表2。
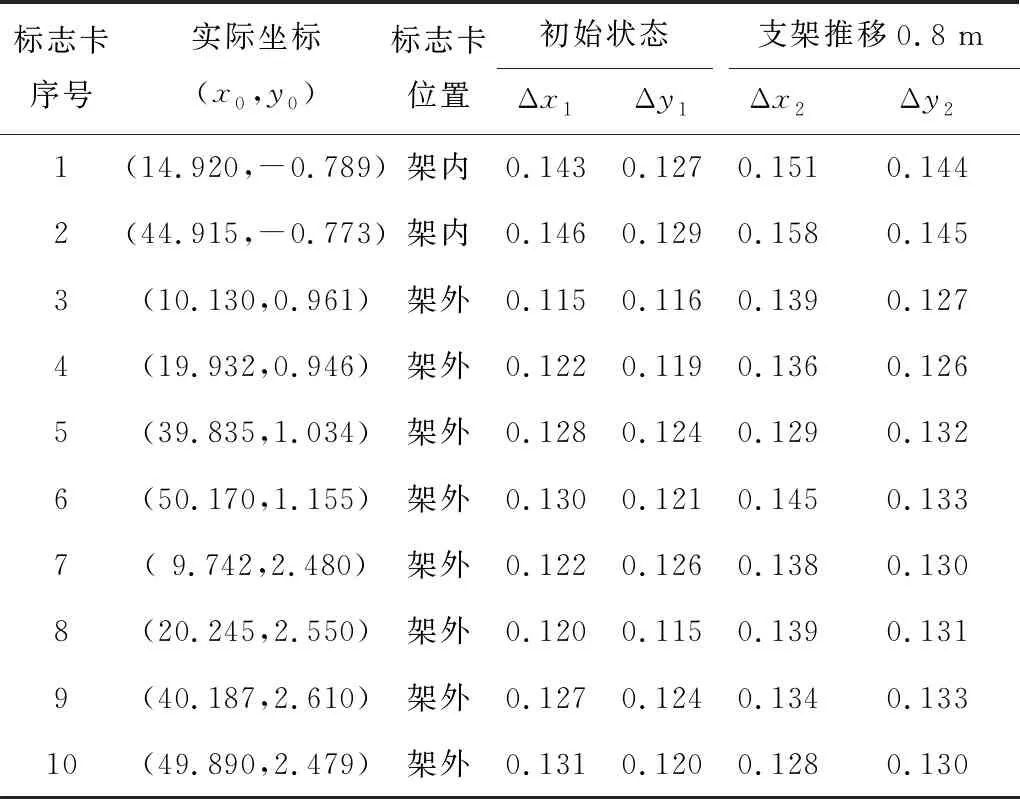
表2 系統定位結果
采用精度計算公式計算2種情況下的系統定位精度。
(8)
計算得到初始狀態下的最小誤差為0.163 m,最大誤差為0.195 m,平均誤差為0.177 m。當液壓支架向前推進0.8 m時,最小誤差為0.182 m,最大誤差為0.214 m,平均誤差為0.193 m。2種情況下系統平均誤差相差0.016 m,與基站位置校準誤差0.012 m(表1)相比略大。
定位誤差結果如圖7所示。當液壓支架推移后,所有標志卡的定位誤差均有所增加。根據本文測量結果,由于液壓支架推移1次,誤差會增大0.016 m,出于對累積誤差的考慮,經過一段時間后,應對定位系統統一初始化校準1次。相同情況下,位置在架內的1號和2號標志卡與架外的其他標志卡相比,定位誤差均大于0.012 m,這是由金屬材質的液壓支架遮擋所導致的。
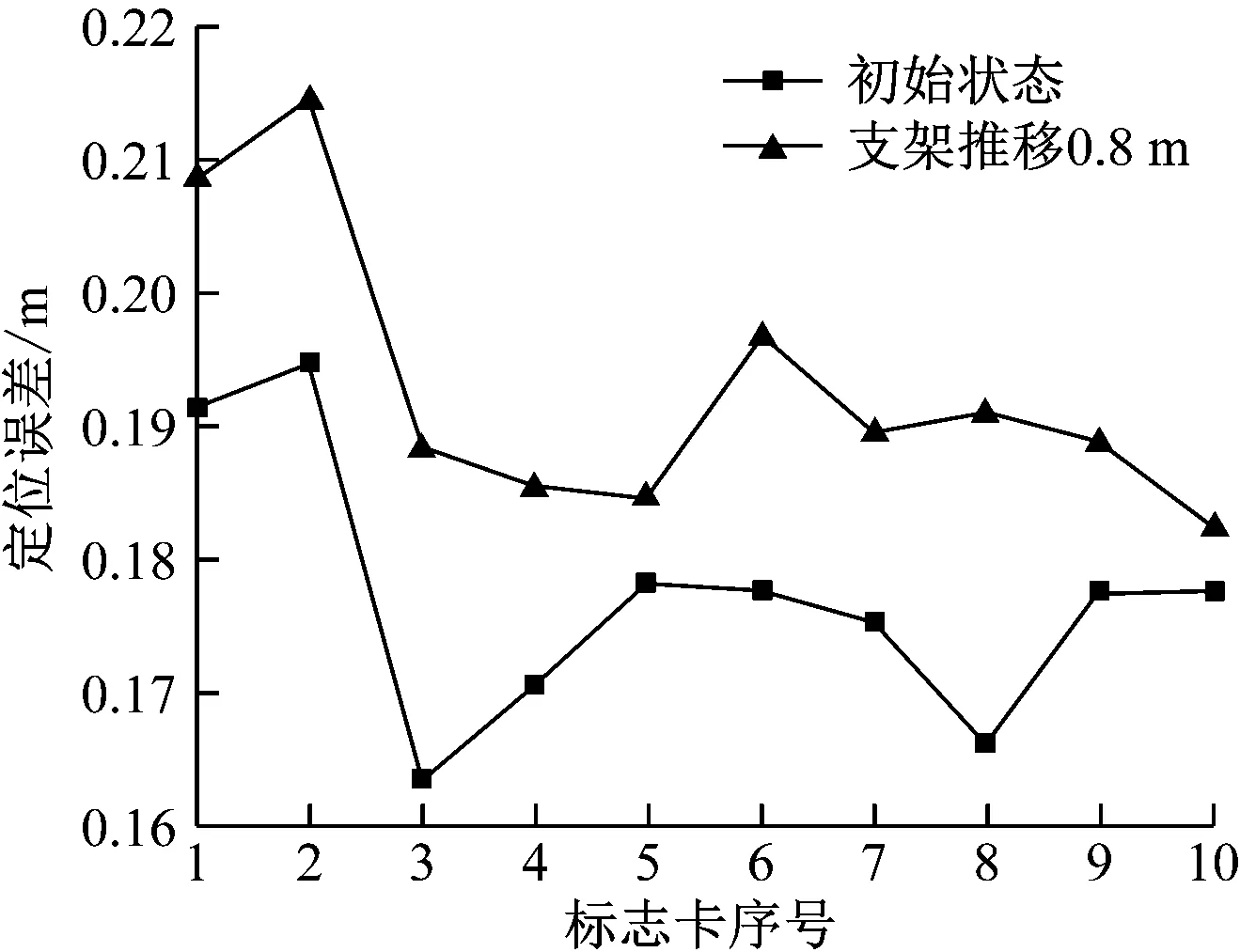
圖7 定位誤差
4 結語
提出了一種基于UWB與激光測距的綜采工作面定位系統,該系統采用DW1000 UWB 芯片實現定位基站和定位標志卡之間的通信,利用UWB定位技術對采煤機進行高精度定位,采用GUJ1400礦用本安型激光測距傳感器測量定位基站之間的距離,利用激光測距技術自動校準定位基站位置。在高河煤礦井下E2308工作面進行了定位系統驗證,結果表明:系統基站位置校準精度在0.011 m左右,系統定位精度達0.193 m,定位精度較高,有效解決了基站位置校準問題。該系統方案可為UWB精確定位系統推廣應用提供借鑒。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
防爆電機(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
河北畫報(2021年2期)2021-05-25 02:07:50
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
山西大同大學學報(自然科學版)(2016年2期)2016-12-12 03:19:28
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58
